СПОСОБ ИМИТАЦИИ КВАДРАТУРНЫХ ОПОРНЫХ СИГНАЛОВ
Вид РИД
Изобретение
Предлагаемое изобретение относится к областям техники моделирования, управления, контроля и регистрации вращающихся объектов (ВО), например, оптико-электронных следящих координаторов (ОЭСК), оптико-электронных следящих систем (ОЭСС), оптических головок самонаведения (ОГС), боевых элементов (БЭ), вращающихся зенитных управляемых ракет (ВЗУР) и вращающихся управляемых артиллерийских снарядов (ВУАС). Предлагаемое техническое решение (TP) может быть использовано при проектировании вышеупомянутых ВО методами моделирования, оценке их функционирования при имитации вращения, для контроля и регистрации параметров ВО в составе упрощенных комплексов контрольно-проверочной стендовой аппаратуры (КПАС).
Для задания системы отсчета координат управляемых ВО, стабилизированных в полете вращением, используют квадратурные опорные сигналы (КОС). Наибольшее распространение получили КОС, представляющие тригонометрические синусно-косинусные функции: sinWt и cosWt, где W - угловая скорость вращения ВО, t - время. В обычном режиме функционирования ВО для преобразования физического вращения объекта в КОС применяют индукционный или фотоэлектрический способы (1, 2). Но в этом случае естественного функционирования ВО необходимо задать вращение по двум координатам: вокруг оси крена объекта и в плоскости слежения. Для этого используют динамический стенд, в состав которого входят два регулируемых привода вращения, два вращающихся контактных устройства, комплект стандартной и нестандартной контрольно-измерительной аппаратуры, имитаторы целей и помех, и много других устройств и элементов. Таким образом, динамический стенд - это сложный и дорогой комплекс аппаратуры больших габаритов, массы, энергопотребления, ввиду чего его применяют только в стационарных условиях предприятий разработчика и изготовителя.
Однако при регламентных проверках функционирования ВО в условиях складских помещений, полевых условиях, при разработке опытных образцов методами моделирования использовать динамический стенд затруднительно или невозможно. В этих случаях приходится применять упрощенную аппаратуру с имитацией функционирования ВО без вращения, и соответственно, имитацией КОС.
Известен способ имитации функционирования ВЗУР и способ имитации КОС, реализованный в ряде устройств (3, 4, 5). Известный способ основан на синхронном по частоте и фазе имитируемого вращения, согласованного с частотой вращения ротора гироскопа ОЭСК и суммарной частотой ротора и объекта, электронном генерировании КОС путем фиксации синусно-косинусных функций в памяти микропроцессорного контроллера и формировании КОС путем их считывания программными средствами. Поскольку патентный поиск по России и другим производящим точное оружие странам - США, Англии, Франции, Китаю, Израилю, имеющим технологии разработки и производства малогабаритных управляемых вращающихся объектов самонаведения (например, passive optical seeker technology, USA), не показал наличия других способов имитации КОС при одновременной имитации функционирования ВО (либо они засекречены) без наличия физического вращения, описанное выше TP способа, разработанное в КБМ, Коломна, является как близким, так и наиболее близким к предлагаемому.
Достоинствами известного способа являются: 1. способ обеспечивает контроль параметров ВО без наличия вращения, что, в свою очередь, позволило создать упрощенный компактный переносной стенд КПАС, который применим в любых условиях, где невозможно использовать полноценный динамический стенд с естественной реализацией вращения линии визирования и объекта; 2. цифровая форма представления информации обеспечивает цифровую форму обработки КОС и сопряжение с цифровыми ЭВМ.
Однако во многих случаях, например при чисто аналоговом моделировании, или при комбинированном цифроаналоговом, но без применения цифровых ЭВМ, а с использованием только аппаратных схемотехнических решений и аналоговых машин (отметим, что аналоговые машины имеют большую точность дифференцирования, когда в контур управления необходимо вводить производные высоких порядков), известный способ непригоден. Также в случае математического или полуфизического моделирования с использованием цифровых ЭВМ, их основной задачей является замыкание малого (слежение) и большого (наведение) контуров с помощью математической модели кинематики цели и ВО в виде системы дифференциальных или интегродифференциальных уравнений. Это требует большого объема и скорости вычислительных операций в режиме реального масштаба времени (РМВ), в связи с чем также нежелательно загружать ЭВМ решением второстепенных задач, которые можно решить аппаратно-схемотехническим способом.
Целью изобретения является расширения спектра областей применения способа имитации КОС. Указанная цель в способе, основанном на синхронном по частоте и фазе имитируемого вращения ВО электронном генерировании КОС, согласованном с частотой и фазой вращения ротора гироскопа и генератора подавления суммарной частоты опорных напряжений гироскопа, достигается тем, что в отличие от TP близкого способа формируют два сдвинутых по фазе на 90° сигналов треугольной формы "развертки-свертки" линий синуса и косинуса единичной тригонометрической окружности, сопоставляют одновременно по первому каналу сигнал "развертки - свертки" линии синуса, а по второму - линии косинуса с полем переменных опорных уровней U, расположенных на позициях U(i,s)
 , где:
, где:
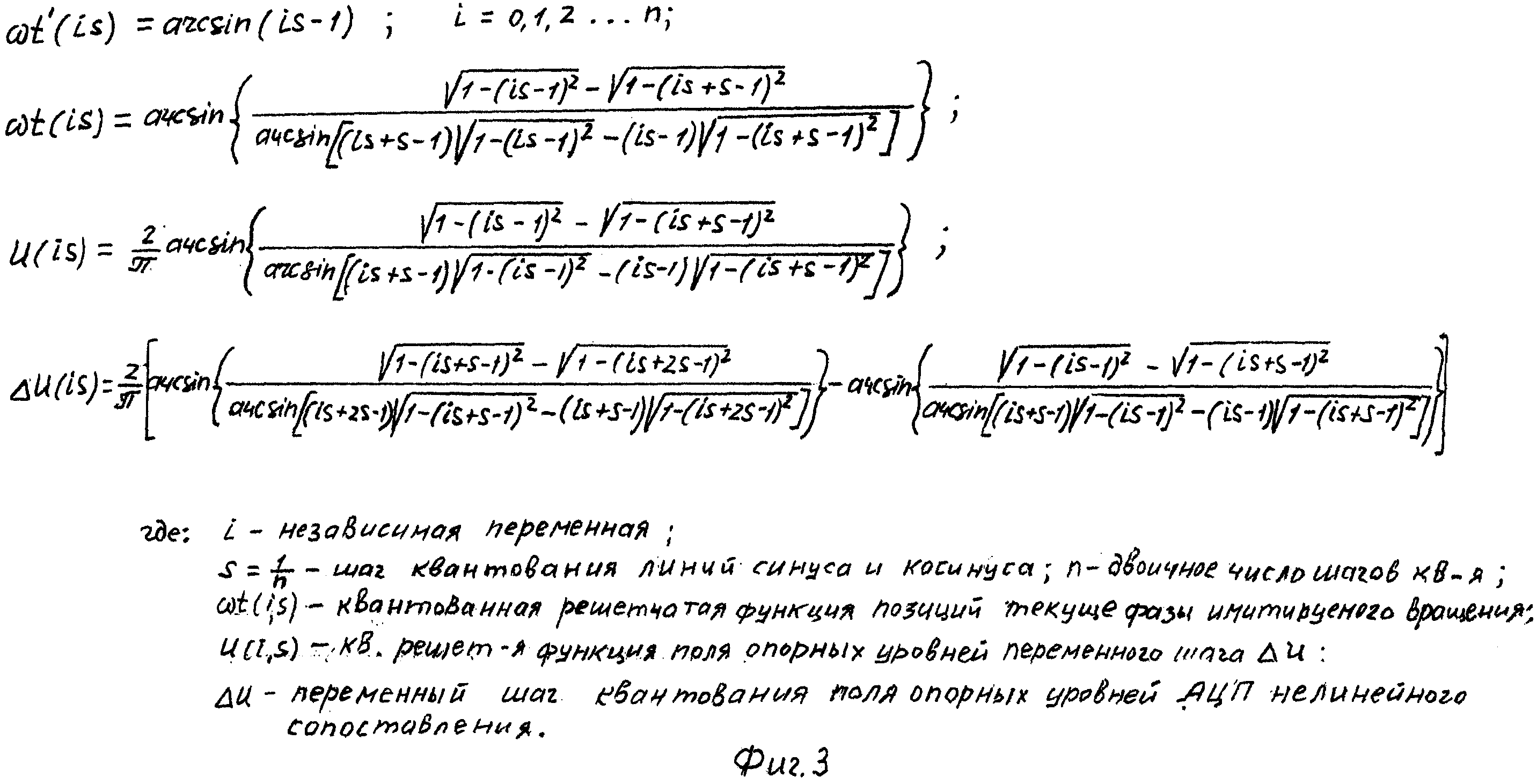
i=1, 2, 3…n номер позиции;  квантования линий синуса и косинуса; n - двоичное число шагов квантования линий синуса и косинуса, U(i,s) - квантованная решетчатая функция поля опорных уровней переменного шага ΔU, формируют в первом и втором канале в моменты пересечения сигналами "развертки-свертки" каждого опорного уровня параллельный двоичный дополнительный код КОС и последовательные унитарные число-импульсные коды КОС, затем преобразуют один из полученных кодов КОС в аналоговые сигналы.
квантования линий синуса и косинуса; n - двоичное число шагов квантования линий синуса и косинуса, U(i,s) - квантованная решетчатая функция поля опорных уровней переменного шага ΔU, формируют в первом и втором канале в моменты пересечения сигналами "развертки-свертки" каждого опорного уровня параллельный двоичный дополнительный код КОС и последовательные унитарные число-импульсные коды КОС, затем преобразуют один из полученных кодов КОС в аналоговые сигналы.
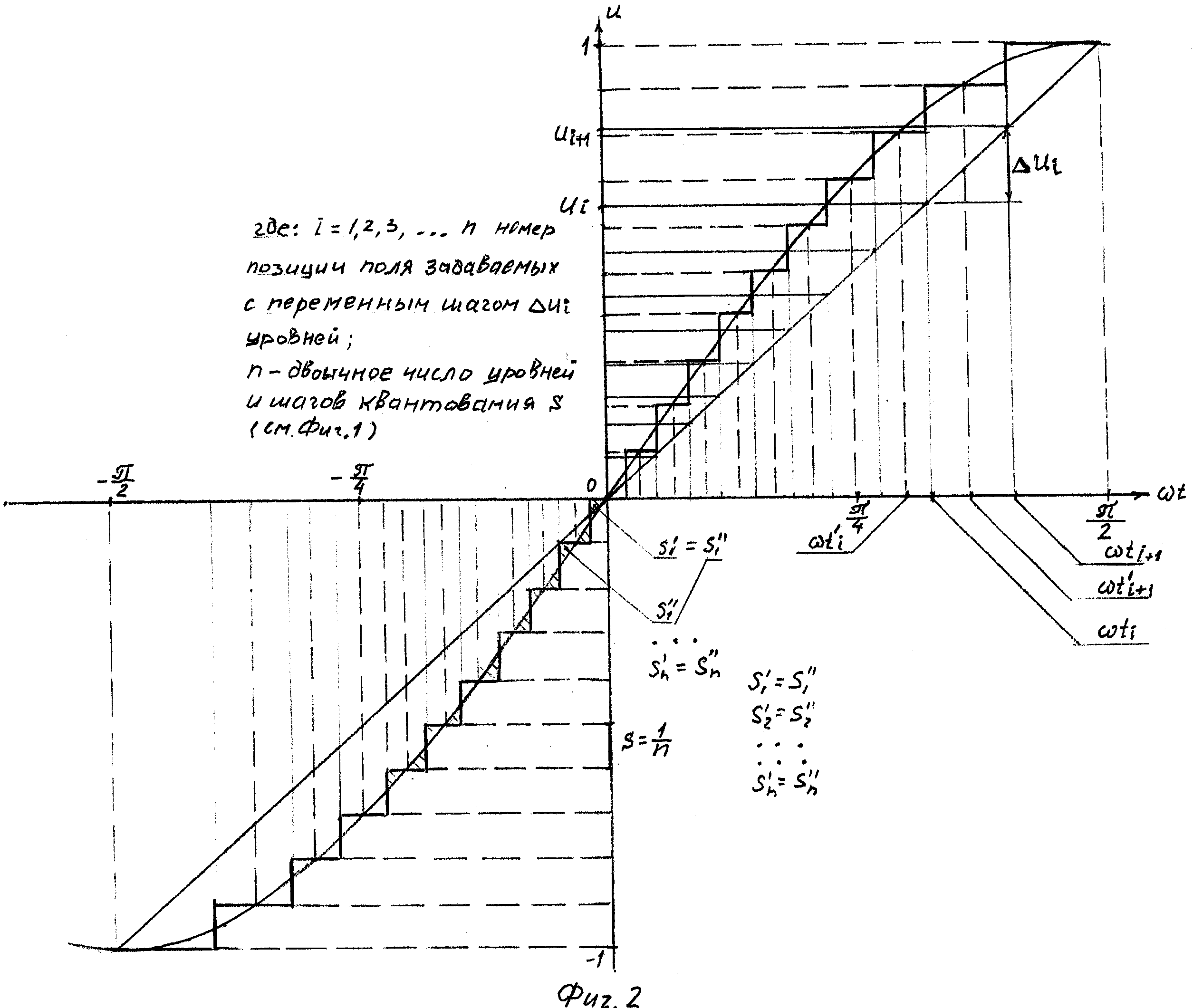
Таким образом, новизна предложенного способа состоит в совокупности операций формирования сигналов "развертки-свертки" синуса и косинуса, нелинейного асинхронного их сопоставления с двоичным числом (напр., 128, 256, 512…) поля переменных опорных уровней и формировании КОС одновременно двух цифровых форм представления и аналоговых КОС. Операция асинхронного нелинейного сопоставления в совокупности с перечисленными ранее неизвестна (известны предложенные мной и защищенные в ряде изобретений операции алгебраического счета нелинейностей текущей фазы вращения). Благодаря предложенной ранее неизвестной совокупности операций способ приобретает следующие достоинства: обеспечивается сопрягаемость как с аналоговыми моделирующими комплексами, с цифровыми, либо их комбинацией, способ применим для упрощенных вариантов КПАС, если используются цифровые ЭВМ, они освобождаются для решения главных моделей кинематики ВО и целей для поражения. Благодаря новому предложенному мной способу аппроксимации повышается точность воспроизведения синусно-косинусных функций (см. Фиг. 2).
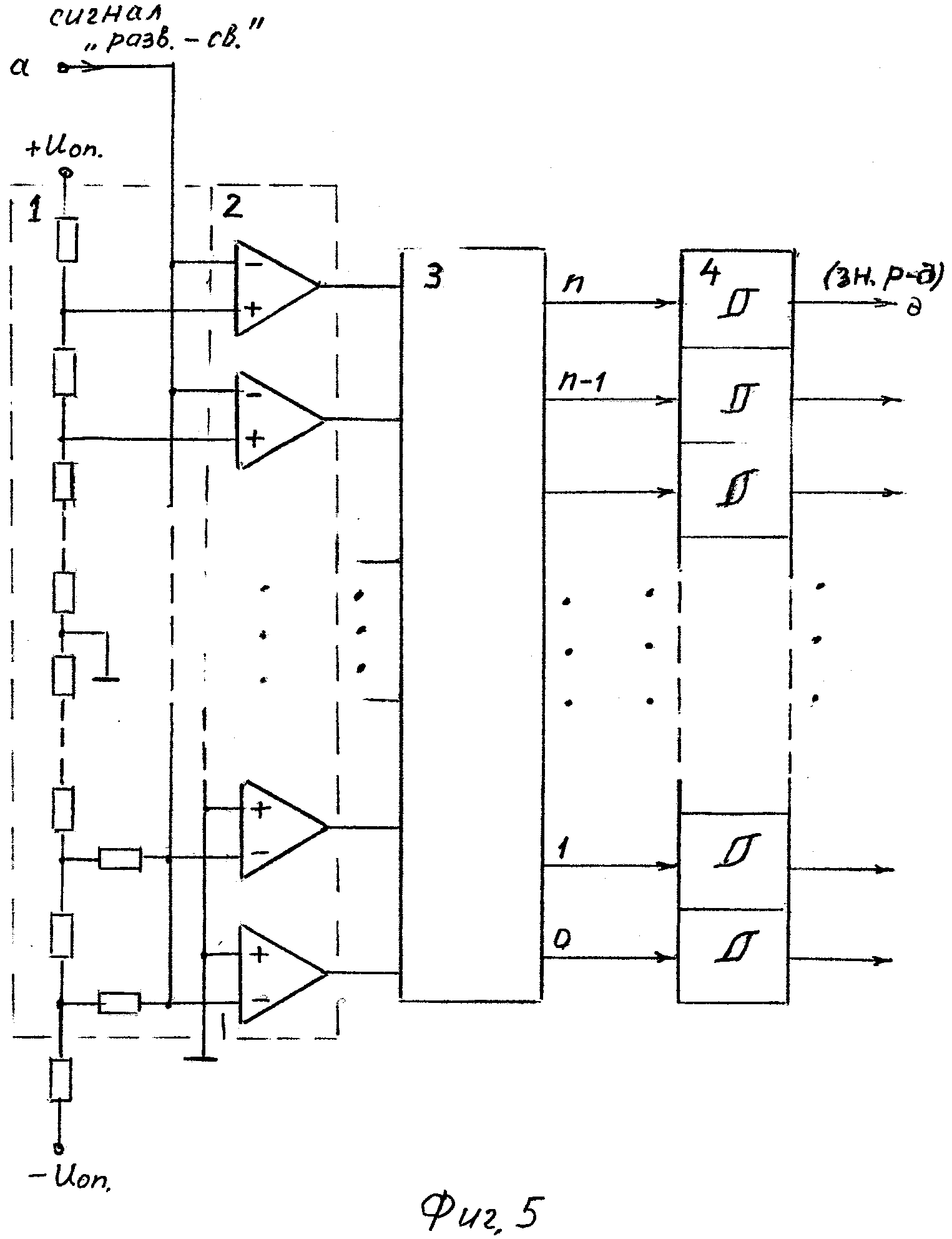
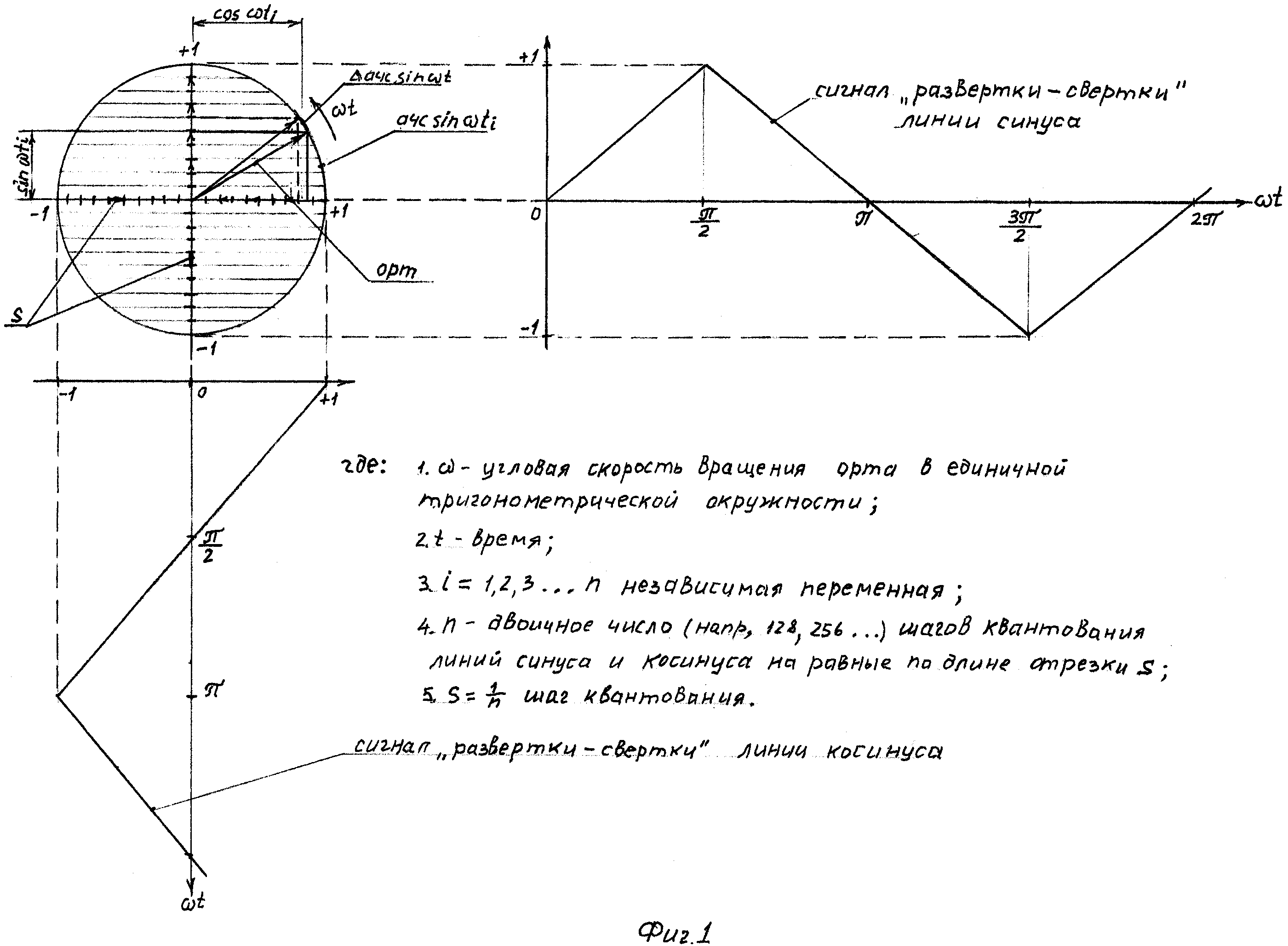
На Фиг. 1, 2, 3 представлено математическое описание в графической и аналитической формах предложенного способа и расчетные соотношения переменных позиций текущей фазы и поля опорных уровней имитируемых КОС; на Фиг. 4 - функциональная схема примера устройства для реализации способа; на Фиг. 5 - укрупненная электрическая схема асинхронного аналого-цифрового преобразователя нелинейного сопоставления; на Фиг. 6 - временные диаграммы работы устройства для осуществления способа, представленного на Фиг. 4.
На Фиг. 1 изображена тригонометрическая окружность, в которой в положительном направлении с угловой скоростью W вращается единичный вектор (орт). При этом его проекция на линию синуса по определению есть функция sinWt, а на линию косинуса - cosWt. Линейно разворачивая и сворачивая, напр., линию синуса (см. Фиг. 2) с шагом  , получаем нелинейные переменные отрезки текущей фазы вращения орта ΔWt и переменный шаг по уровню ΔU. Линейный асинхронный алгебраический счет полученных нелинейностей воспроизводит единичные синусно-косинусные функции, т.е. КОС. Расчетные формулы переменных позиций текущей фазы и уровня для использованного более приближенного метода аппроксимации приведены на Фиг. 3.
, получаем нелинейные переменные отрезки текущей фазы вращения орта ΔWt и переменный шаг по уровню ΔU. Линейный асинхронный алгебраический счет полученных нелинейностей воспроизводит единичные синусно-косинусные функции, т.е. КОС. Расчетные формулы переменных позиций текущей фазы и уровня для использованного более приближенного метода аппроксимации приведены на Фиг. 3.
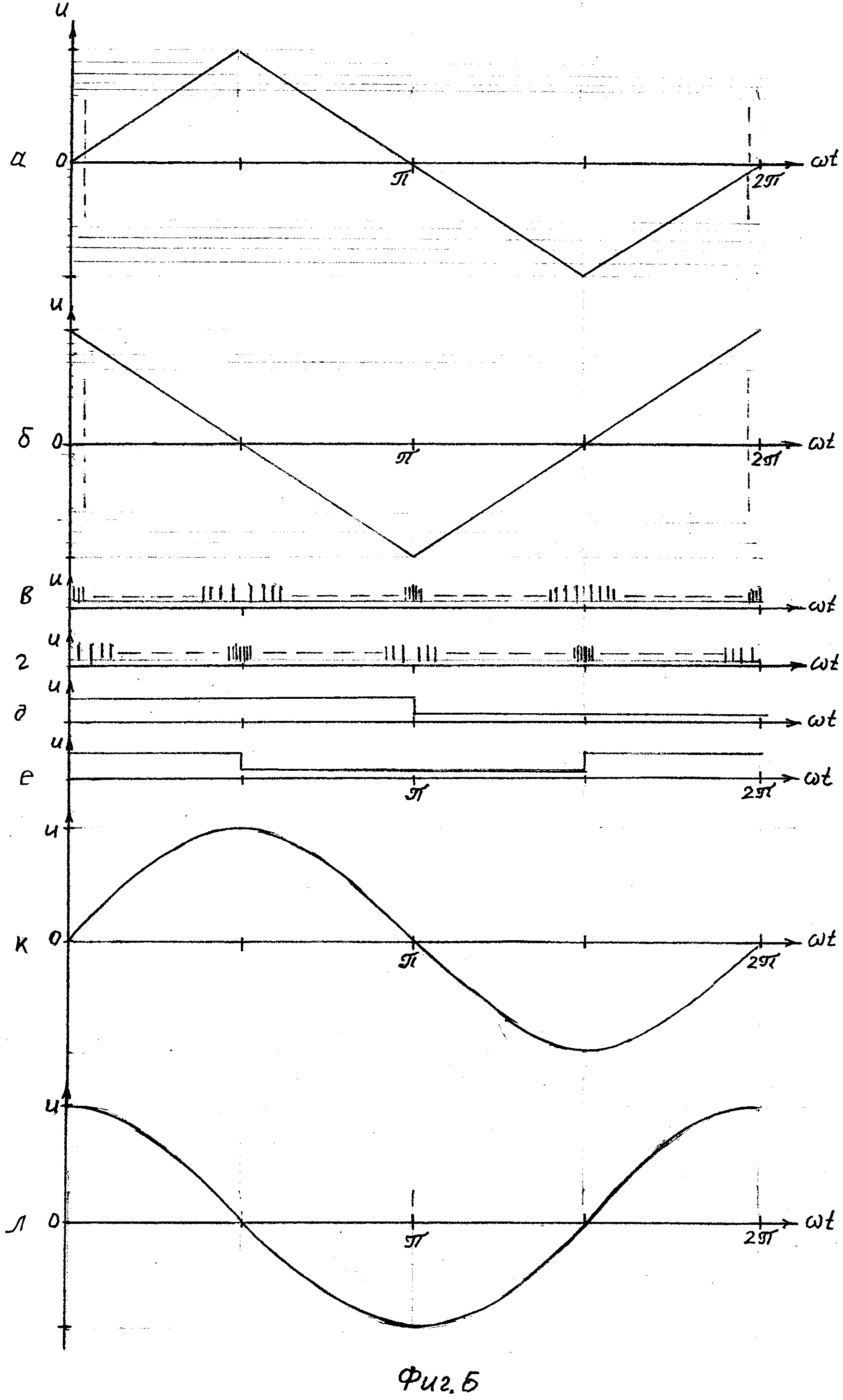
Устройство для реализации способа на Фиг. 4 содержит генератор 1 сигналов а, б "развертки-свертки" линий синуса и косинуса треугольной формы, которые поступают на входы канала 2 синуса и канала 3 косинуса соответственно, канал 2 синуса содержит последовательно соединенные асинхронный АЦП 2-1 нелинейного сопоставления, четырехквадрантный ЦАП 2-2 и фильтр 2-3 низкой частоты (ФНЧ); а также формирователь 2-4 коротких счетных импульсов, на вход которого поступает сигнал с младшего разряда АЦП 2-1. Канал косинуса построен аналогично каналу синуса.
Устройство на Фиг. 4 работает следующим образом (см. Фиг. 6). Сигнал а "развертки-свертки" линии синуса поступает на вход АЦП 2-1, где сопоставляется с полем заданных с переменным шагом опорных уровней. Ввиду нелинейности преобразования на выходе АЦП формируется в двоичном дополнительном коде цифровой сигнал с воспроизведением синусной функциональной зависимости, который поступает на вход 4-квадрантного ЦАП 2-2 и далее на вход ФНЧ 2-3, на выходе которого формируется прецизионный аналоговый сигнал. ФНЧ 2-3 служит для сглаживания ступенек. Сигнал 6 "развертки-свертки" линии косинуса поступает на вход АЦП 3-1, где также сопоставляется с полем переменных опорных уровней, и на выходе АЦП 3-1 формируется цифровой сигнал с воспроизведением косинусной зависимости. Полученный сигнал с выхода АЦП 3-1 поступает на вход 4-квадрантного ЦАП 3-2 и далее на вход ФНЧ 3-3, где воспроизводится косинусный сигнал аналоговой формы представления. Прямоугольные импульсы с выходов младших разрядов АЦП 2-1 и 3-1 поступают на входы формирователей 2-4 и 3-4 коротких счетных импульсов, последовательности которых представляют синусную и косинусную функциональную зависимости в виде унитарного число-импульсного кода.
Предложенный способ основан на разработанной мной новой форме представления и преобразования сигналов. В данном случае квантуются с постоянным шагом одномерные сущности длины линий синуса и косинуса как аргументы, а функциями являются переменные уровни и переменные отрезки текущей фазы вращения ВО, представляющие синус и косинус в виде двоичного кода (уровни) и в виде унитарного кода (нелинейности отрезков текущей фазы). Таким образом, двумерная задача формирования КОС сводится к одномерной, простому алгебраическому счету нелинейностей переменных отрезков уровней и текущей фазы. Таким образом, предложенный метод имитации КОС далеко не очевиден, не вытекает из существующего уровня математики, науки и техники, т.е. имеет изобретательский уровень. Для реализации способа требуются известные электронные компоненты, резисторная линейка делителей опорного напряжения АЦП нелинейного сопоставления может быть выполнена путем напыления резисторов через маску в форме функции arc sin wt, а при моделировании, когда используется только единичный экземпляр, ее можно составить из прецезионных переменных резисторов для точной настройки заданных расчетных позиций поля уровней. То есть способ соответствует критерию промышленной применимости. Все подробности схемотехнических решений устройства в материалах заявки не раскрываются, они показаны укрупненно, так как объем притязаний ограничивается только способом.
В заключение следует отметить, что разработка ВО методами моделирования сейчас утрачена, хотя эти методы дают максимальное приближение к реальным условиям функционирования объектов самонаведения. Это позволяет резко сократить сроки разработок, снизить стоимость, резко уменьшить объем натурных испытаний на полигоне, оценивая функционирование опытного образца для различных целей и внешних воздействий и настраивая его оптимальное функционирование еще на моделирующем комплексе. Например, на ОАО ЛОМО, СПб, по рекомендациям цру-шной конторы Mac Kinsey and company КБ моделирования было ликвидировано. Если вероятность поражения старой "Иглы", отработанной на модели, доходила до 80%, то новые модификации резко снизили этот показатель, и для маскировки и сокрытия этого факта пришлось ставить неконтактный взрыватель. Таким образом, решение задач имитации сигналов и внешних воздействий весьма актуально для перевооружения нашей армии современными системами точного оружия.
Источники информации
1. Брускин Д. и др. "Электрические машины", Т. 2, стр. 32-38.
2. СССР. А.с. №297567.
3. СССР, А.с. №59292.
4. СССР, А.с. №176399.
5. СССР, А.с. №210307 - аналоги и прототип.
Также приняты во внимание: Технические описания комплексов 9К32М и 9К38М, Оборонгиз, 1970, 1980.
Способ имитации квадратурных опорных сигналов, заключающийся в синхронном по частоте и фазе имитируемого вращения электронном генерировании синусно-косинусных сигналов, отличающийся тем, что формируют два сдвинутых между собой по фазе на 90° сигнала треугольной формы "развертки-свертки" линий синуса и косинуса единичной тригонометрической окружности, одновременно сопоставляют по первому каналу сигнал "развертки-свертки" линии синуса, а по второму - линии косинуса с полем переменных опорных уровней, расположенных на позициях , где:i=1, 2, 3, … n первая независимая переменная - номер опорного уровня; - вторая независимая переменная - постоянный шаг квантования линий синуса и косинуса; n - двоичное число шагов квантования; U(i,s) - квантованная решетчатая функция аргументов i, s, характеризующая позиции поля переменных опорных уровней для заданного шага s; формируют в первом канале в моменты пересечения сигнала "развертки-свертки" каждого опорного уровня параллельный двоичный дополнительный код сигнала синусной функциональной зависимости и одновременно в виде последовательности счетных импульсов унитарного число-импульсного кода, а во втором канале в моменты пересечения сигнала "развертки-свертки" каждого уровня таким же образом формируют сигналы косинусной зависимости, затем преобразуют один из полученных цифровых сигналов в первом и втором каналах в квадратурные опорные сигналы аналоговой формы представления.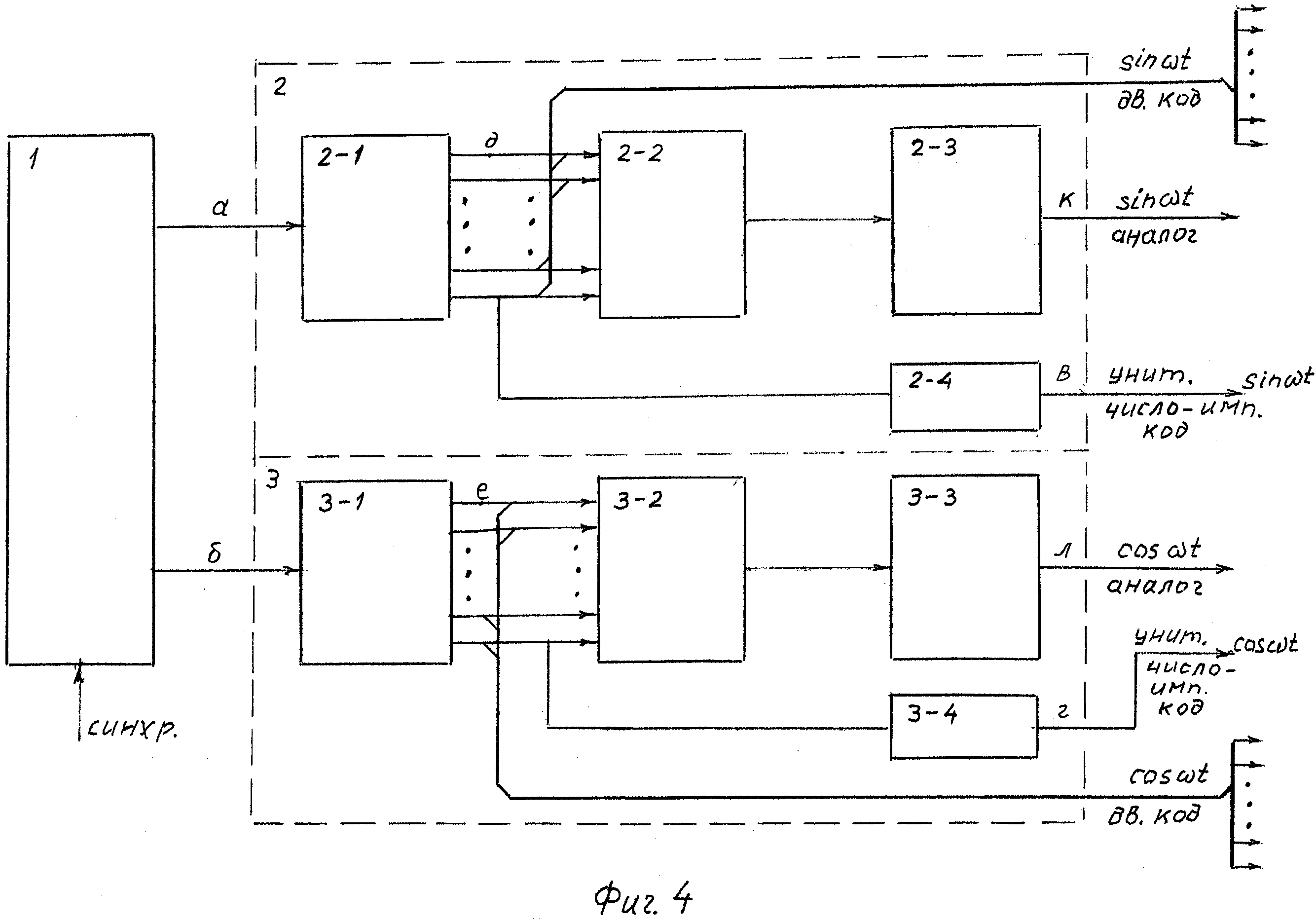


Вращающаяся крылатая ракета
Способ полета вращающейся ракеты
Способ формирования функциональных-интегральных-дифференцированных квадратурных опорных сигналов
Вихревой жидкостной тороидальный гироскоп
Способ определения коэффициента команды одноканальных вращающихся ракет и снарядов с релейным рулевым приводом и устройство для его осуществления
Способ стабилизации слабодемпфированного неустойчивого объекта управления и устройство для его осуществления
Жидкостное гироскопическое устройство для стабилизации и демпфирования объектов с шестью степенями свободы
Способ имитации оптического излучения воздушных целей
Способ адаптивной спектральной селекции целей
Адаптивный цифровой спектральный селектор цели
Вращающаяся крылатая ракета
Способ полета вращающейся ракеты
Способ формирования функциональных-интегральных-дифференцированных квадратурных опорных сигналов
Вихревой жидкостной тороидальный гироскоп
Способ определения коэффициента команды одноканальных вращающихся ракет и снарядов с релейным рулевым приводом и устройство для его осуществления
Способ стабилизации слабодемпфированного неустойчивого объекта управления и устройство для его осуществления
Жидкостное гироскопическое устройство для стабилизации и демпфирования объектов с шестью степенями свободы
Способ имитации оптического излучения воздушных целей
Способ адаптивной спектральной селекции целей
Адаптивный цифровой спектральный селектор цели

