Результат интеллектуальной деятельности: НАВИГАЦИОННЫЙ КОМПЛЕКС
Вид РИД
Изобретение
Изобретение относится к области управления системами навигации и ориентации, в частности к коррекции их погрешностей, численных критериев степени наблюдаемости навигационных комплексов (НК) с инерциальной навигационной системой (ИНС).
Известен навигационный комплекс (НК), включающий ИНС с одним выходом, приемник спутниковой навигационной системы (ПСНС) с одним выходом, первый и второй сумматоры, каждый из которых имеет два входа и один выход, при этом выход ИНС соединен с первыми входами сумматоров, а выход ПСНС соединен со вторым входом первого сумматора, выход которого соединен со вторым входом второго сумматора (см. Лукьянов В.В. Бесплатформенная интегрированная навигационная система на базе MEMS-чувствительных элементов, нано- и микросистемная техника, изд. «Новые технологии», 2006, №12, с.60-64).
Сигнал ПСНС, пропорциональный скорости летательного аппарата (ЛА), поступает на второй вход первого сумматора, где вычитается из сигнала, поступившего с ИНС на первый вход первого сумматора, после чего с выхода первого сумматора сигнал, пропорциональный сумме ошибок ИНС и ПСНС в определении скорости, поступает на второй вход второго сумматора, где алгебраически вычитается из сигнала ИНС, поступившего на первый вход второго сумматора и пропорционального истинной информации о навигационных параметрах с ошибкой ИНС. На выходе второго сумматора сигнал равен истинной навигационной информации с ошибкой ПСНС. В НК происходит компенсация ошибок ИНС в определении скорости ЛА.
Недостатком известного НК является то, что ошибка ИНС в определении углов отклонения относительно сопровождающего трехгранника не компенсируется и с течением времени нарастает.
Задачей патентуемого изобретения является повышение точности измерений угла отклонения гироскопически стабилизированной платформы (ГСП), повышение надежности работы.
Техническим результатом является повышение степени наблюдаемости угла отклонения ГСП относительно сопровождающего трехгранника за счет формирования сигнала коррекции и сглаживания измерительного шума.
Указанные задача и технический результат достигаются навигационным комплексом, включающим ИНС с одним выходом, ПСНС с одним выходом, первый и второй сумматоры, каждый из которых имеет два входа и один выход, при этом выход ИНС соединен с первыми входами сумматоров, а выход ПСНС соединен со вторым входом первого сумматора, при этом навигационный комплекс снабжен блоком задержки на 1 такт, первым и вторым усилителями, третьим сумматором, имеющим первый и второй входы и один выход, причем выход первого сумматора соединен с входом блока задержки и входом второго усилителя, выход блока задержки соединен с входом первого усилителя, выход которого соединен со вторым входом третьего сумматора, выход второго усилителя соединен с первым входом третьего сумматора, выход которого соединен со вторым входом второго сумматора.
А также тем, что каждый из усилителей имеет коэффициент усиления 1/2gT.
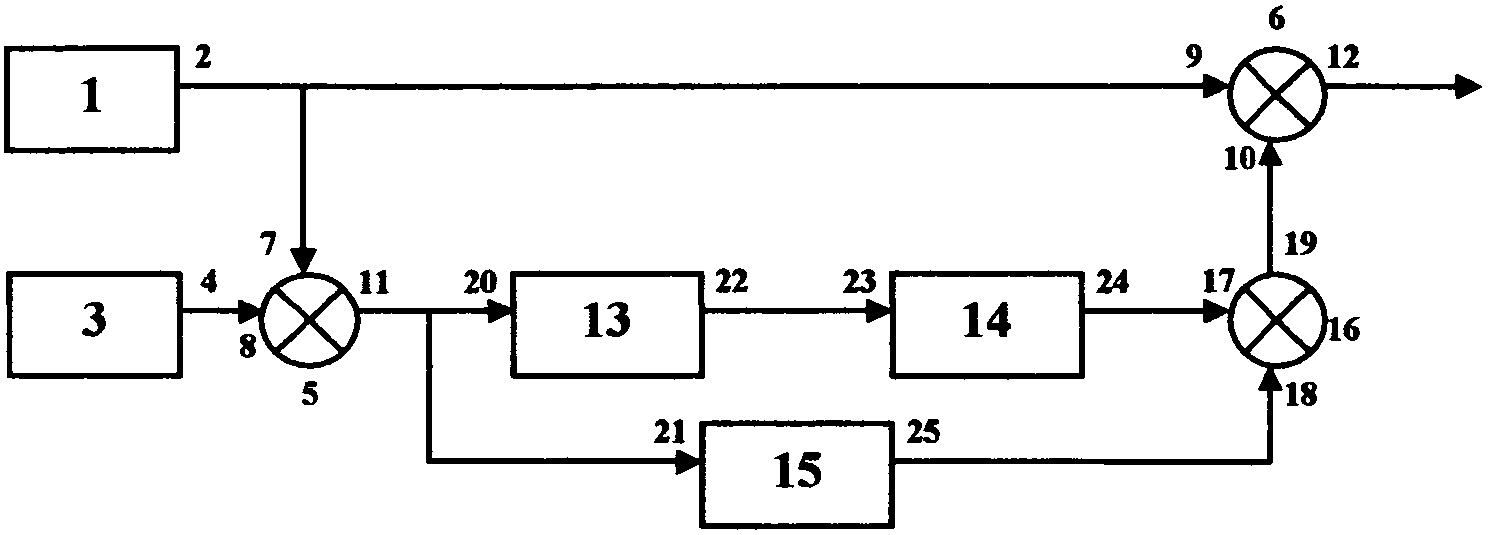
На чертеже показана схема патентуемого НК.
Навигационный комплекс включает ИНС 1 с одним выходом 2, ПСНС 3 с одним выходом 4, первый и второй сумматоры 5 и 6, каждый из которых имеет по два входа 7, 8 и 9, 10 и по одному выходу 11 и 12 соответственно, при этом выход 2 ИНС 1 соединен с первыми входами 7 и 9 сумматоров 5 и 6, а выход 4 ПСНС 3 соединен со вторым входом 8 первого сумматора 5. НК имеет блок задержки на 1 такт 13, первый 14 и второй 15 усилители, третий 16 сумматор, который имеет первый 17 и второй 18 входы и один выход 19. Выход 11 первого сумматора 5 соединен с входом 20 блока задержки 13 и входом 21 второго усилителя 15, выход 22 блока задержки 13 соединен с входом 23 первого усилителя 14, выход 24 первого усилителя 14 соединен с первым входом 17 третьего сумматора 16, а выход 25 второго усилителя 15 соединен со вторым входом 18 третьего сумматора 16. Выход 19 третьего сумматора 16 соединен со вторым входом 10 второго сумматора 6. Выход 12 второго сумматора 6 является выходом НК. Каждый из усилителей 14 и 15 имеет коэффициент усиления 1/2gT. В качестве ПСНС НК содержит приемник спутниковой системы ГЛОНАСС.
Линия задержки выполнена на L, C-элементах и представляет собой каскад реактивных элементов, позволяющих осуществлять фазовую задержку на 1 такт (катушка индуктивности и конденсаторы; 2 инвертора; в виде таймера, последовательности триггеров).
Усилители выполнены в виде операционного усилителя с обратной связью, величина отношения сопротивления линии обратной связи и входного сопротивления представляет собой коэффициент усиления (т.е. подбирая сопротивление в цепи обратной связи, можно задать коэффициент усиления, который подбирается в соответствии с соотношением 1/2gT).
Патентуемый НК работает следующим образом.
Критерий степени наблюдаемости имеет вид (Неусыпин К.А., Пролетарский А.В., Цибизова Т.Ю. Системы управления летательными аппаратами и алгоритмы обработки информации, М., изд. МГОУ, 2006):

Здесь М[(xi)2] - дисперсия произвольной i-ой компоненты вектора состояния;
М[(yi)2] - дисперсия непосредственно измеряемого вектора состояния.
В критерии степени наблюдаемости (1) мерой наблюдаемости является скаляр. Эта особенность выгодно отличает предложенный критерий от известных, так как позволяет проводить сравнение степеней наблюдаемости компонент различных векторов состояния.
Уравнения ошибок системы инерциальной навигации имеют вид (Салычев О.С. Скалярное оценивание многомерных динамических систем, Машиностроение, 1987, 216 с.):
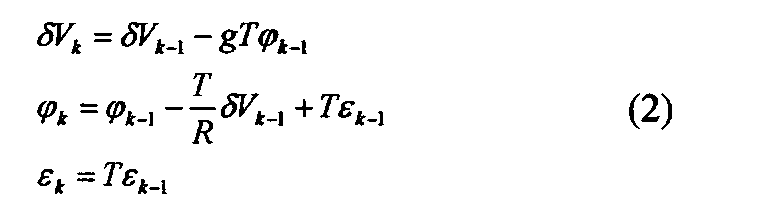
Где δVk - ошибка ИНС в определении скорости; εk - скорость дрейфа ГСП; φk - угол отклонения ГСП относительно сопровождающего трехгранника.
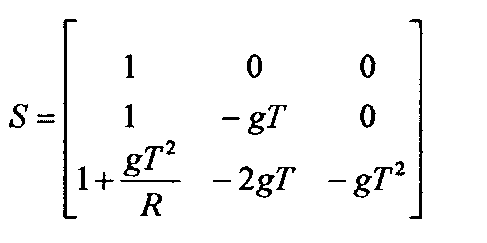
Составим вектор измерений в виде:

где
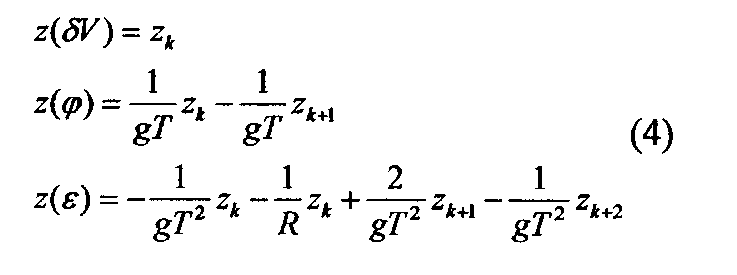
Тогда для непосредственного измерения компонент вектора состояния получим следующие уравнения:
Определим дисперсию измерительного шума, приведенного к углу отклонения ГСП относительно сопровождающего трехгранника:
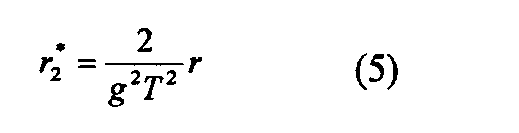
где r - дисперсия ошибки в измерении скорости, которая подлежит непосредственному измерению с помощью датчика внешней информации, в данном случае СНС.
В соответствии с выражением (5) определим степень наблюдаемости угла отклонения ГСП относительно сопровождающего трехгранника:
Подставим численные значения параметров, полученные в результате полунатурного эксперимента с реальной системой Компанав-2. Ошибка ИНС в определении скорости равна 60 м/мин, угол отклонения платформы относительного сопровождающего трехгранника - 2,10-4 рад., период дискретизации выбран равным 1 минуте. В результате получим, что степень наблюдаемости угла отклонения ГСП относительно сопровождающего трехгранника равна 0,01.
Полученное значение степени наблюдаемости имеет четкий физический смысл. Относительная погрешность оценивания наблюдаемой компоненты вектора состояния по отношению к оцениваемому номиналу в случае оценивания угла отклонения будет такая же, как и относительная погрешность оценивания непосредственно измеряемой компоненты через 100 минут.
Предложенный критерий степени наблюдаемости позволяет определить количественную оценку наблюдаемости каждой компоненты вектора состояния систем, что в практических приложениях дает возможность выбрать оптимальные параметры приведенных измерений в НК. При использовании шага вычислений, равного 2Т, степень наблюдаемости угла отклонения ГСП увеличивается и будет равна 0,04 (вместо 0,01 при Т). Выбранное значение шага вычислений 2Т обосновано тем, что в практических приложениях на большем шаге коррекции ошибки ИНС достигают существенных величин, искажая истинную навигационную информацию ЛА. Таким образом, из практических соображений выбран максимальный приемлемый шаг вычислений, позволяющий снизить уровень измерительных шумов, т.е. повысить степень наблюдаемости угла отклонения ГСП.
Сигнал с выхода 2 ИНС 1, пропорциональный истинной информации о навигационных параметрах ЛА с ошибкой ИНС в определении скорости, поступает в первый вход 7 первого сумматора 5, на второй вход 8 которого поступает сигнал с выхода 4 ПСНС 3, пропорциональный истинной навигационной информации с ошибкой ПСНС. С выхода 11 первого сумматора 5 сигнал, пропорциональный смеси ошибок ИНС и ПСНС zk+1, поступает на вход 20 блока задержки 13, где задерживается на один такт вычисления и становится пропорциональным zk, а также поступает на вход 21 второго усилителя 15 с коэффициентом 1/2gT. С выхода 22 блока задержки 13 сигнал, пропорциональный zk, поступает на вход 23 первого усилителя 14 с коэффициентом 1/2gT. Сигналы с выхода 24 первого усилителя 14 и с выхода 25 второго усилителя 15 поступают соответственно на первый 17 и второй 18 входы третьего сумматора 16, на выходе 19 которого сигнал пропорционален разности сигналов в соответствии со второй формулой (4). Далее с выхода 19 третьего сумматора 16 сигнал, пропорциональный углу отклонения ГСП, поступает на второй вход 10 второго сумматора 6, где вычитается из сигнала с выхода 2 ИНС 1, поступившего на первый вход 9 второго сумматора 6. Тем самым, компенсируется ошибка в определении угла отклонения ГСП. На выходе 12 второго сумматора 6 сигнал пропорционален информации о навигационных параметрах летательного аппарата (ЛА) со скомпенсированными ошибками в определении угла отклонения ГСП от плоскости горизонта, что приводит к увеличению точности навигационной информации ЛА. Ошибка ИНС компенсируется, вместо нее в выходном сигнале НК появляется ошибка спутниковой навигационной системы (СНС), которая имеет низкий уровень и не нарастает со временем, а предложенное устройство уменьшает ошибки НК за счет повышения степени наблюдаемости угла отклонения ГСП путем сглаживания измерительных шумов.
Устройство мультиплексирования микроголограмм в системе оптико-голографической памяти
Полупроводниковый преобразователь давления
Селективный навигационный комплекс
Навигационный комплекс
Устройство мультиплексирования микроголограмм в системе оптико-голографической памяти
Полупроводниковый преобразователь давления
Селективный навигационный комплекс
Навигационный комплекс

