Результат интеллектуальной деятельности: СЕЛЕКТИВНЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС
Вид РИД
Изобретение
Изобретение относится к области разработки систем навигации и ориентации, в частности к коррекции их погрешностей, численных критериев степени наблюдаемости навигационных комплексов (НК) с инерциальной навигационной системой (ИНС).
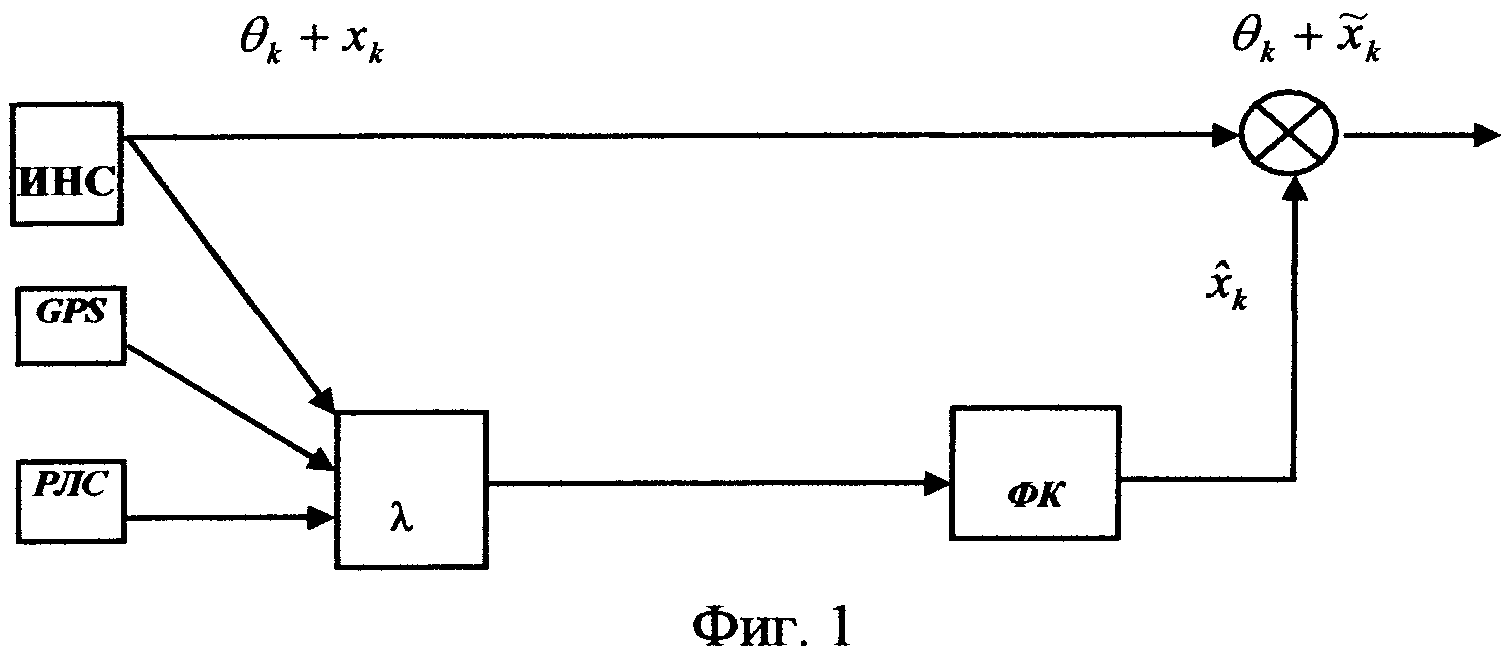
Известен селективный навигационный комплекс (СНК), включающий ИНС с одним выходом, приемник спутниковой навигационной системы (ПСНС) с одним выходом, радиолокационную станцию (РЛС) с одним выходом, блок определения степеней наблюдаемости и формирования измерений, имеющий три входа и один выход, фильтр Калмана и сумматор, имеющий два входа и один выход, при этом выход ИНС соединен с первым входом блока определения степеней наблюдаемости и формирования измерений, второй вход которого соединен с выходом ПСНС, а третий вход соединен с выходом РЛС, выход ИНС также соединен со вторым входом сумматора, а выход фильтра Калмана соединен с первым входом сумматора, выход которого является выходом СНК (см. Неусыпин К.А. Современные системы и методы наведения, навигации и управления летательными аппаратами. М., Изд. МГОУ, 2009, с.91; с.156, с.158-159, см. фиг.1).
Сигнал ИНС поступает на первый вход блока определения степеней наблюдаемости и формирования измерений, где вычитается из сигнала, поступившего на второй вход с ПСНС, для формирования измерений z1, на третий вход блока определения степеней наблюдаемости и формирования измерений поступает сигнал от РЛС, который вычитается из сигнала с ИНС для формирования измерений z2, далее формируются измерительные выборки Z1 и Z2 путем суммирования 30 поступивших измерений соответственно, которые далее осредняются. Затем суммарные значения Z1 и Z2 поступают в критерий степени наблюдаемости для вычисления значений степеней наблюдаемости каждой компоненты вектора состояния, включающего ошибки ИНС в определении скорости, угла отклонения ГСП и дрейфа ГСП. Далее степени наблюдаемости сравниваются и по наибольшему значению выбирается сигнал для дальнейшей обработки, который поступает в фильтр Калмана, где осуществляется оценка вектора состояния. С выхода фильтра Калмана сигнал, пропорциональный оценкам ошибок ИНС, поступает на первый вход сумматора, где вычитается из сигнала с ИНС для компенсации ошибок ИНС.
На выходе сумматора сигнал равен истинной навигационной информации с ошибкой оценивания.
В практических приложениях уровень измерительных шумов обычно меняется, поэтому заранее сделать однозначный выбор структуры комплекса не представляется возможным. Эффективность применения СНК можно продемонстрировать аналитически.
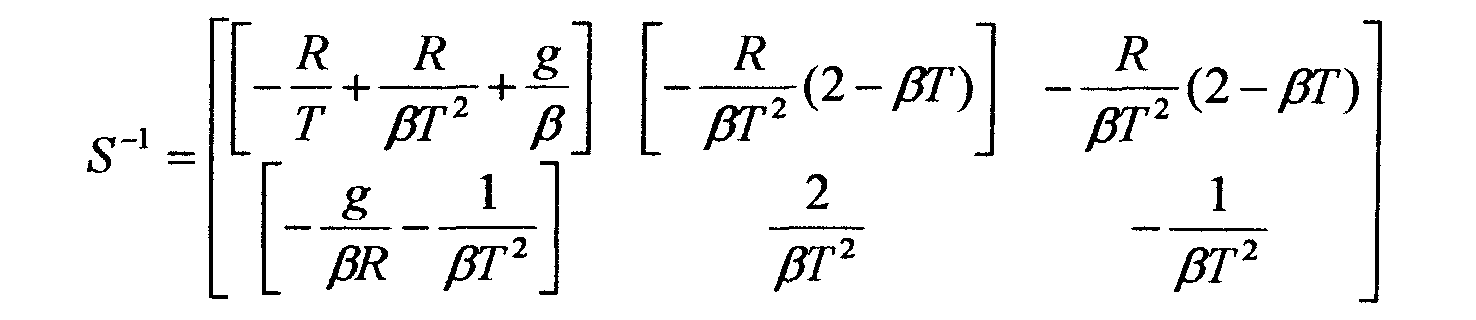
При измерении дополнительными источниками информации об угле отклонения ГСП от плоскости горизонта S-1 имеет вид:
Дисперсия шума, приведенного к погрешности ИНС в определении скорости  (δV), имеет вид:
(δV), имеет вид:

Подставляя в выражение для дисперсии приведенного шума численные значения:
Т=2 мин, β=10-2 мин-1, R=6370000 m, g=35280 m/мин2, r=10-14 рад2.
Получим  .
.
При использовании в качестве дополнительного источника информации ДИСС примем дисперсию  .
.
Следовательно, для приборов, имеющих подобные характеристики для вычисления погрешностей ИНС в определении скорости, целесообразно измерять углы отклонения ГСП от плоскости горизонта и по этим измерениям оценивать погрешности в определении скорости. В этом случае при измерении одновременно δV и φ в алгоритме оценивания, если компонента вектора состояния непосредственно измеряется, то ошибка оценивания не меняется от того, измеряются ли другие компоненты или нет.
В этом случае при измерении одновременно скорости ЛА и углов отклонения ГСП в алгоритме оценивания, если компонента вектора состояния непосредственно измеряется, то ошибка оценивания не меняется от того, измеряются ли другие компоненты или нет. Следовательно, в данном случае целесообразнее использовать только измерения углов отклонения ГСП.
На чертеже (фиг.1) представлена схема известного СНК.
Обозначения на чертеже следующие:
θk - истинная навигационная информация; xk - погрешности ИНС;  - оценки погрешностей ИНС;
- оценки погрешностей ИНС;  - ошибка оценивания; ФК - фильтр Калмана; λ - блок определения степеней наблюдаемости и формирования измерений zk.
- ошибка оценивания; ФК - фильтр Калмана; λ - блок определения степеней наблюдаемости и формирования измерений zk.
Недостатком известного СНК является то, что в критерии степени наблюдаемости дисперсии исследуемых компонент вектора состояния определяются априори в условиях предполетной подготовки, а в полете они могут существенно меняться, что приводит к ошибочному определению степеней наблюдаемости и, следовательно, к неправильному выбору измерительного сигнала, увеличению ошибок оценивания фильтром Калмана и снижению точности определения навигационных параметров ЛА.
Задачей предлагаемого изобретения является повышение точности измерений СНК, повышение надежности работы СНК.
Техническим результатом является уменьшение ошибок оценивания погрешностей ИНС за счет выбора оптимальной структуры СНК путем повышения точности вычисления степеней наблюдаемости погрешностей ИНС.
Указанные задача и технический результат достигаются селективным навигационным комплексом (СНК), включающим ИНС с одним выходом, приемник спутниковой навигационной системы (ПСНС) с одним выходом, радиолокационную станцию (РЛС) с одним выходом, блок определения степеней наблюдаемости и формирования измерений, имеющий три входа и один выход, фильтр Калмана и сумматор, имеющий два входа и один выход, при этом выход ИНС соединен с первым входом блока определения степеней наблюдаемости и формирования измерений, второй вход которого соединен с выходом ПСНС, а третий вход соединен с выходом РЛС, выход ИНС также соединен со вторым входом сумматора, а выход фильтра Калмана соединен с первым входом сумматора, при этом СНК снабжен квадратором и накопительным устройством, а блок определения степеней наблюдаемости и формирования измерений выполнен с четвертым входом, причем выход фильтра Калмана соединен дополнительно с входом квадратора, выход которого соединен с входом накопительного устройства, выход накопительного устройства соединен с четвертым входом блока определения степеней наблюдаемости и формирования измерений.
А также тем, что в блоке определения степеней наблюдаемости и формирования измерений в критерии степени наблюдаемости вычисляются дисперсии компонент вектора состояния в процессе полета.
На фиг.1 показана схема СНК по прототипу.
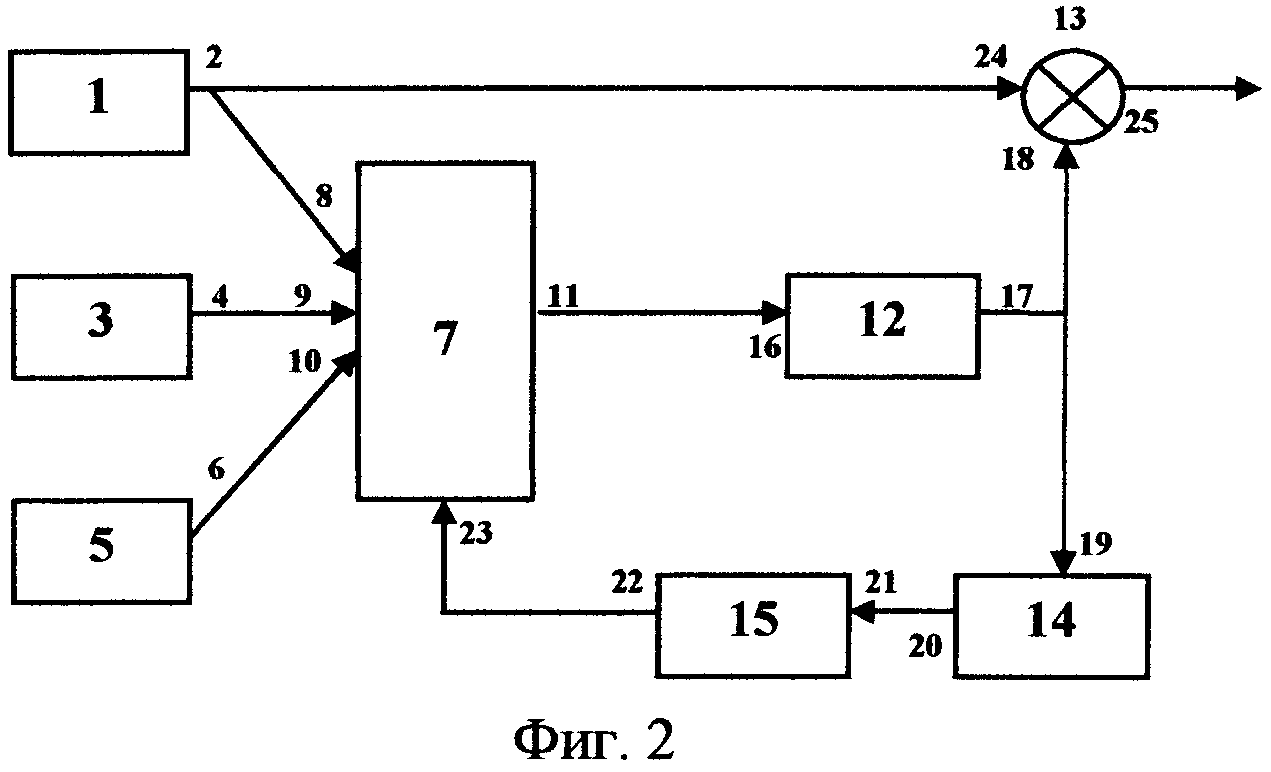
На фиг.2 показана схема предлагаемого СНК.
Селективный навигационный комплекс (СНК) включает ИНС 1 с одним выходом 2, приемник спутниковой навигационной системы (ПСНС) 3 с одним выходом 4, радиолокационную станцию (РЛС) 5 с одним выходом 6, блок определения степеней наблюдаемости и формирования измерений 7, имеющий три входа 8, 9, 10 и один выход 11, при этом выход 2 ИНС 1 соединен с входом 8 блока определения степеней наблюдаемости и формирования измерений 7, второй вход 9 которого соединен с выходом 4 ПСНС 3, а третий вход 10 блока 7 соединен с выходом 6 РЛС 5, а также фильтр Калмана 12, сумматор 13, квадратор 14 и накопительное устройство 15. Выход 11 блока 7 соединен с входом 16 фильтра Калмана 12, выход 17 которого соединен с первым входом 18 сумматора 13 и входом 19 квадратора 14, выход 20 квадратора 14 соединен с входом 21 накопительного устройства 15, выход 22 которого соединен с четвертым входом 23 блока 7. Выход 2 ИНС 1 соединен также со вторым входом 24 сумматора 13, выход 25 которого является выходом СНК.
Фильтр Калмана выполнен в соответствии с алгоритмом вида:
(Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. М.: Машиностроение, 1982, 215 с.).
Уравнения ошибок ИНС имеют вид:

где Ф - матрица модели; х - вектор состояния включает ошибки ИНС, W - вектор входного шума.
Часть вектора состояния измеряется:

Здесь: Zk+1 - m-вектор измерений; Vk+1 - m-вектор ошибок измерения;
Hk+1,k - (m×n)-матрица измерений.
В фильтре Калмана: Rk+1 - ковариационная матрица измерительного шума V, Q - ковариационная матрица входного шума w, Kk+1 - матрица усиления фильтра:
 .
.
Фильтр Калмана имеет вид:
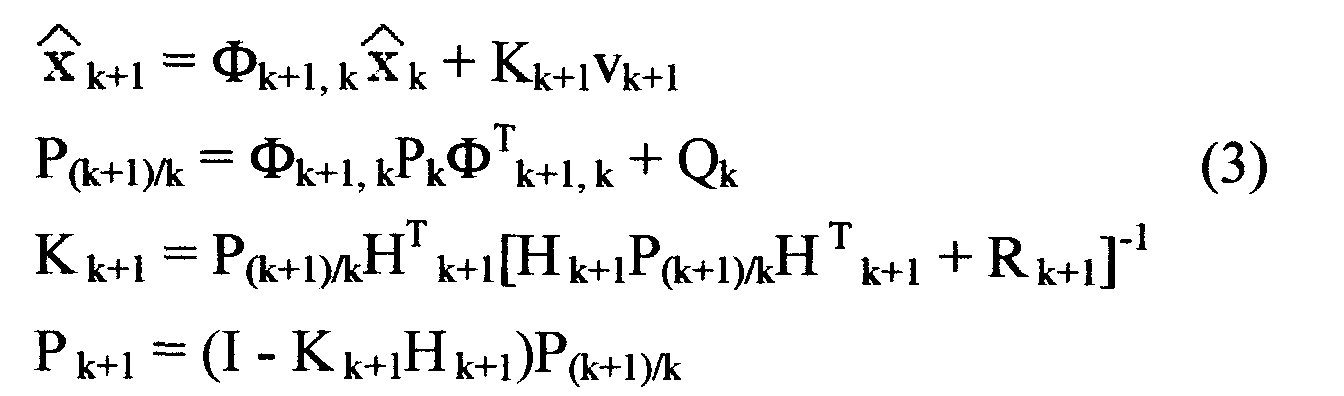
Здесь P(k+1)/k - априорная ковариационная матрица ошибок оценивания; Pk+1 - апостериорная ковариационная матрица ошибок оценивания. При помощи фильтра Калмана осуществляется восстановление всего вектора состояния системы и подавляется влияние измерительного шума.
Квадратор 14 выполнен в виде матричного усилителя и представляет собой логическую схему, работающую по алгоритму х-х2 и собранную на базовых логических элементах «и-не» (555ЛА3).
Квадратор 14 осуществляет возведение сигнала, пропорционального оценкам ошибок ИНС, в квадрат.
Накопительное устройство 15 выполнено на микросхеме микропроцессорного исполнения PIC1684F и осуществляет вычисление дисперсии оценок ошибок ИНС на основе 30 измерений z в соответствии с формулой:
Сумматор выполнен в виде цифрового логического сумматора.
Критерий степени наблюдаемости имеет вид (Неусыпин К.А., Пролетарский А.В., Цибизова Т.Ю. Системы управления летательными аппаратами и алгоритмы обработки информации. М., Изд. МГОУ, 2006):

Здесь: M[(xi)2] - дисперсия произвольной i-й компоненты вектора состояния;
М[(yi)2] - дисперсия непосредственно измеряемого вектора состояния.
В критерии степени наблюдаемости (4) мерой наблюдаемости является скаляр. Эта особенность выгодно отличает критерий от известных, так как позволяет проводить сравнение степеней наблюдаемости компонент различных векторов состояния.
Уравнения ошибок системы инерциальной навигации имеют вид (Салычев О.С. Скалярное оценивание многомерных динамических систем. М., Машиностроение, 1987, 216 с.):
где δVk - ошибка ИНС в определении скорости; εk - скорость дрейфа ГСП; φk - угол отклонения ГСП относительно сопровождающего трехгранника.
Составим вектор измерений в виде:
где 
Тогда для непосредственного измерения компонент вектора состояния получим следующие уравнения:
Определим дисперсию измерительного шума, приведенного к углу отклонения ГСП относительно сопровождающего трехгранника:
где r - дисперсия ошибки в измерении скорости, которая подлежит непосредственному измерению с помощью внешней информации.
В соответствии с выражением (8) определим степень наблюдаемости угла отклонения ГСП относительно сопровождающего трехгранника:
Степень наблюдаемости скорости дрейфа ГСП определяется аналогично:
Подставим численные значения параметров, полученные в результате полунатурного эксперимента с реальной ИНС. Ошибка ИНС в определении скорости равна 60 м/мин, угол отклонения платформы относительного сопровождающего трехгранника -2.10-4 рад, скорость дрейфа 10-5 рад/мин, период дискретизации выбран равным 1 минуте. В результате получим, что степень наблюдаемости угла отклонения ГСП относительно сопровождающего трехгранника равна 0,01, а степень наблюдаемости скорости дрейфа ГСП - 0,0001.
Полученные значения степеней наблюдаемости имеют четкий физический смысл. Относительная погрешность оценивания наблюдаемой компоненты вектора состояния по отношению к оцениваемому номиналу в случае оценивания угла отклонения будет такая же, как и относительная погрешность оценивания непосредственно измеряемой компоненты через 100 минут, а в случае скорости дрейфа - через 10000 минут.
Выбранное значение величины измерительной выборки для вычисления дисперсии в блоке 15 обосновано тем, что в практических приложениях в условиях полета ЛА через 30 шагов вычисления оценок фильтром Калмана внешние условия функционирования ЛА могут измениться (появление активных и пассивных помех) и целесообразно подтвердить выбор состава измерительных систем СНК или определить новый состав СНК.
СНК работает следующим образом:
Сигнал с выхода 2 ИНС 1, пропорциональный истинной навигационной информации о параметрах ЛА с ошибкой ИНС, поступает на первый вход 8 блока 7, сигнал в выхода 4 ПСНС 3, пропорциональный истинной навигационной информации с ошибкой ПСНС, поступает на второй вход 9 блока 7, сигнал с выхода 6 РЛС 5, пропорциональный истинной навигационной информации с ошибкой РЛС, поступает на третий вход 10 блока 7. В блоке 7 сигнал с входа 8 вычитается из сигнала с входа 9, разностный сигнал пропорционален смеси ошибок ИНС и ПСНС z1, который затем преобразуется в соответствии с формулой:

В блоке 7 сигнал со второго входа 9 вычитается из сигнала с третьего входа 10, разностный сигнал пропорционален смеси ошибок ИНС и РЛС z2, который затем преобразуется в соответствии с формулой:

Затем значения Z1 и Z2 поступают в критерий степени наблюдаемости для вычисления значений степеней наблюдаемости каждой компоненты вектора состояния, включающего ошибки ИНС в определении скорости, угла отклонения ГСП и дрейфа ГСП. На четвертый вход 23 блока 7 поступает сигнал, пропорциональный дисперсии оценки ошибок ИНС  , который использован в критерии степени наблюдаемости (4) формула (9). Вычисленные степени наблюдаемости сравниваются и по наибольшему значению выбирается сигнал z для дальнейшей обработки, который с выхода 11 блока 7 поступает на вход 16 фильтра Калмана 12, на выходе которого 17 сигнал пропорционален оценке вектора состояния (оценке ошибок ИНС
, который использован в критерии степени наблюдаемости (4) формула (9). Вычисленные степени наблюдаемости сравниваются и по наибольшему значению выбирается сигнал z для дальнейшей обработки, который с выхода 11 блока 7 поступает на вход 16 фильтра Калмана 12, на выходе которого 17 сигнал пропорционален оценке вектора состояния (оценке ошибок ИНС  ). С выхода 17 фильтра Калмана 12 сигнал, пропорциональный оценкам ошибок ИНС, поступает на первый вход 18 сумматора 13 и на вход 19 квадратора 14, где преобразуется в соответствии с формулой
). С выхода 17 фильтра Калмана 12 сигнал, пропорциональный оценкам ошибок ИНС, поступает на первый вход 18 сумматора 13 и на вход 19 квадратора 14, где преобразуется в соответствии с формулой  . С выхода 20 квадратора 14 сигнал, пропорциональный квадрату оценки вектора состояния, включающего ошибки ИНС, поступает на вход 21 накопительного устройства 15, где преобразуется в соответствии с формулой:
. С выхода 20 квадратора 14 сигнал, пропорциональный квадрату оценки вектора состояния, включающего ошибки ИНС, поступает на вход 21 накопительного устройства 15, где преобразуется в соответствии с формулой:
На выходе 22 накопительного устройства 15 сигнал пропорционален дисперсии оценки ошибок ИНС.
С выхода 2 ИНС 1 сигнал, пропорциональный истинной навигационной информации с ошибкой ИНС х, поступает также на второй вход 24 сумматора 13, где вычитается из сигнала с первого входа 18, пропорционального оценке ошибок ИНС х, на выходе 25 сумматора 13 сигнал является выходом СНК и равен истинной навигационной информации с ошибкой оценивания.
Ошибка оценивания ошибок ИНС существенно меньше ошибки ИНС, тем самым компенсируются ошибки ИНС, что приводит к увеличению точности навигационной информации ЛА.
В прототипе в критерии степени наблюдаемости блок 7 использовал значения дисперсии отклонения угла ГСП, определенные априори в предполетной подготовке, а в предлагаемом СНК оценка дисперсии угла отклонения ГСП определяется в полете с учетом текущих особенностей движения ЛА.
В отличие от прототипа предлагаемый СНК обладает большей точностью за счет более точного определения степеней наблюдаемости ошибок ИНС, что позволяет включать в состав используемых измерительных систем те системы, которые обеспечивают наибольшую точность оценивания ошибок ИНС и соответственно большую точность СНК.
Устройство мультиплексирования микроголограмм в системе оптико-голографической памяти
Полупроводниковый преобразователь давления
Навигационный комплекс
Навигационный комплекс
Устройство мультиплексирования микроголограмм в системе оптико-голографической памяти
Полупроводниковый преобразователь давления
Навигационный комплекс
Навигационный комплекс

