Результат интеллектуальной деятельности: ПРИВОД СТРЕЛОЧНОГО ПЕРЕВОДА
Вид РИД
Изобретение
Изобретение относится к железнодорожному транспорту, а именно к стрелочным переводам.
Прототипом является привод стрелочного перевода, содержащий, по крайней мере, один выключатель электродвигателя, соединенного с редуктором, содержащего червячную пару, ось с червяком, который имеет возможность перемещения вдоль геометрической оси [Пат. РФ 2499712, МПК B61L 5/06, B61L 5/18, 2013].
Недостатками прототипа являются:
- относительно сложная конструкция привода.
Задачей изобретения является устранение указанного недостатка, а именно упрощение конструкции привода и повышение его надежности.
Задача решается тем, что в приводе стрелочного перевода, содержащем, по крайней мере, один выключатель электродвигателя, соединенного с редуктором, содержащего червячную пару, ось с червяком, который имеет возможность перемещения вдоль геометрической оси вращения, червяк выполнен в виде цилиндрического вала с закрепленной на нем и охватывающей его, по крайней мере, одной витой пружиной, концы которой могут контактировать с ограничителями осевого перемещения.
Между витками первой пружины размещены витки второй витой пружины, концы которой могут контактировать с ограничителями осевого перемещения. Шаг пружины на валу отличен от ее шага вне вала. Диаметр пружины на валу отличен от ее диаметра вне вала. Ось и вал сопряжены посредством шлицевого соединения. Ось и вал выполнены за одно. На валу витки пружин соприкасаются.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Выполнение червяка в виде цилиндрического вала с закрепленной на нем и охватывающей его, по крайней мере, одной витой пружиной, концы которой могут контактировать с ограничителями осевого перемещения, позволяет упростить конструкцию червяка и всего привода в целом.
Размещение между витками первой пружины витков второй витой пружины, концы которой могут контактировать с ограничителями осевого перемещения, дает возможность увеличить диапазон изменения усилия осевого перемещения вала, что упрощает конструкцию.
Отличие шага и диаметра пружины на валу от ее шага и диаметра вне вала позволяет изменять силовую характеристику пружины, что упрощает конструкцию привода.
Сопряжение оси и вала посредством шлицевого соединения упрощает конструкцию и повышает ее надежность.
Выполнение оси и вала за одно упрощает конструкцию.
Соприкосновение на валу витков пружин повышает их сопротивляемость осевому перемещению вдоль вала под нагрузкой, что повышает надежность.
Изобретение поясняется чертежами.
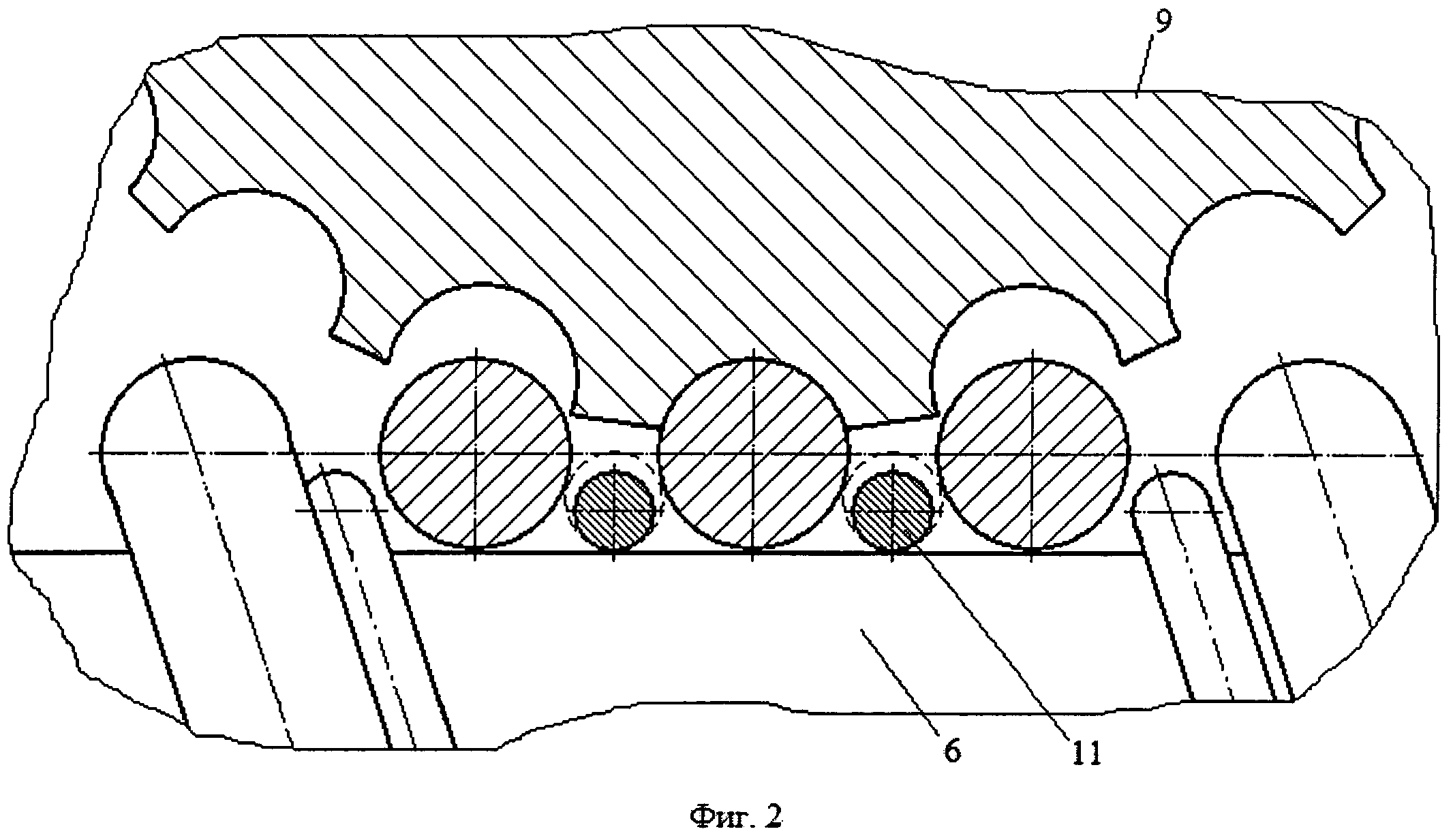
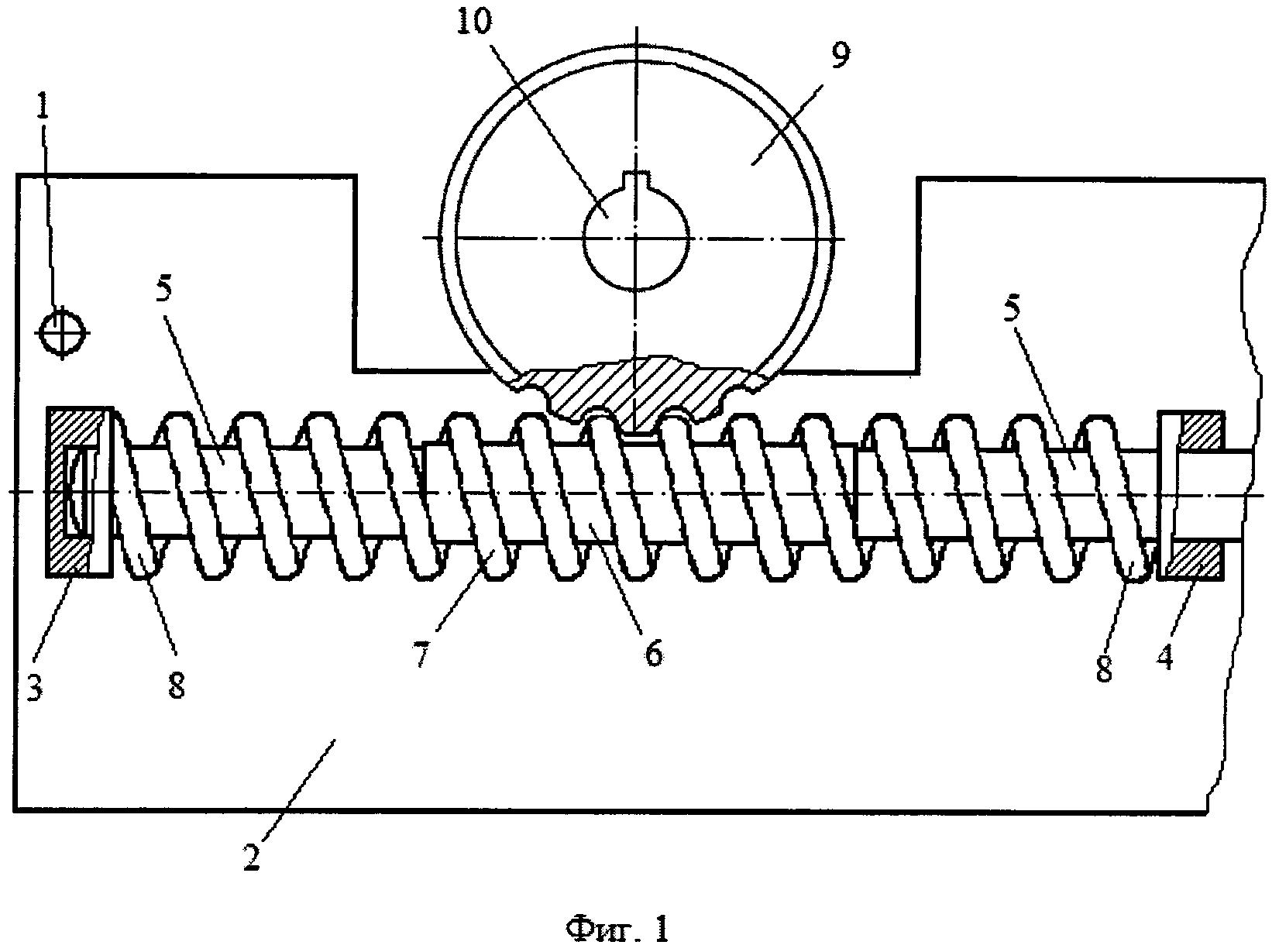
На фиг. 1 изображена схема привода стрелочного перевода. На фиг. 2 изображен фрагмент стрелочного перевода.
Привод содержит установленную с возможностью поворота вокруг оси 1 платформу 2, с неподвижно закрепленными опорами 3, 4, в которых с возможностью вращения установлена ось 5, на которой размещен вал 6, имеющий больший диаметр, чем ось. На валу закреплена и охватывает его, по крайней мере, одна витая пружина 7, концы 8 которой могут контактировать с ограничителями осевого перемещения (опорами), имеющая возможность зацепления с колесом 9, закрепленным на оси 10 привода. При этом вал 6 может иметь возможность перемещения вдоль оси 5, которая должна быть выполнена, например, со шлицами, или сделан за одно с осью 5. В этом случае ось должна иметь возможность осевого перемещения в опорах, при этом двигатель должен быть соединен с осью так, чтобы не препятствовать указанному перемещению, т.е. соединен, например, посредством шлицов. На валу, между витками первой пружины 7 может быть закреплена вторая пружина 11, концы которой могут быть больше, меньше или равны длине концов первой пружины, при этом между крайними витками пружин и опорой может быть зазор.
Работает привод следующим образом.
Предположим, что вал 6 выполнен отдельно от оси 5, имеющей шлицы.
Для перевода остряка из одного крайнего положения в другое включают двигатель (не показан), в результате чего ось 5 заодно с валом 6 и пружиной 7 начинают вращаться. Для поворота колеса 9, кинематически связанного с шибером стрелочного перевода, требуется определенное усилие, а пружина 7, конец 8 которой не касается опоры 3, не воздействует с нужным усилием на зуб колеса, поэтому вал 6 начнет передвигаться вдоль шлицов оси 5, одновременно вращаясь (фиг. 1, 2). При этом колесо 9 остается неподвижным, т.е. работа двигателя происходит вхолостую.
Предположим, что вал 6 смещается по оси 5 влево. После касания концом 8 торца опоры 3 пружина 7 начнет сжиматься, при этом усилие воздействия ее в зоне вала 6 на зуб колеса 9 будет плавно возрастать. В конце концов, оно достигнет величины, достаточной для вращения колеса 9 с осью 10, что вызовет перемещение остряка из одного крайнего положения в другое. После подхода его к рамному рельсу сработает выключатель, управляемый контрольной линейкой стрелочного перевода, и двигатель привода выключится, продолжая вращаться по инерции. При этом пружина 7 будет продолжать сжиматься, гася за счет своей деформации энергию инерции вращающихся масс, в результате чего вращение прекратится, а остряк прижмется к рамному рельсу с определенным усилием. При выполнении вала 6 заодно с осью 5 механизм привода работает аналогичным образом.
На вал 6 может быть насажена пружина 11, концы которой в зависимости от требований, предъявляемых к характеристике обеих пружин, могут занимать различное положение, относительно концов пружины 7, т.е. сначала, например, может сжиматься пружина 11, а потом - обе вместе. Заметим, что если витки пружины 11 сделать соприкасающимися с витками пружины 7 (показано пунктирной окружностью на фиг. 2), то увеличится сопротивление пружин осевому перемещению.
Если необходимо вывести вал 6 из зацепления с колесом 9, например, для запирания остряка, то поворачивают платформу 2 вокруг оси 1. В этом положении платформы кинематическая связь с двигателем отсутствует, и перевод остряка невозможен.
Внедрение изобретения позволит создать простой, надежный привод стрелочного перевода, имеющий низкие затраты эксплуатационного цикла.
Способ управления тормозами грузового железнодорожного состава
Способ контроля теплового состояния буксы грузового железнодорожного вагона
Способ управления тормозом грузового железнодорожного вагона
Способ работы тормоза грузового железнодорожного вагона
Способ спасения человека при кораблекрушении
Способ подкормки растений
Способ уборки снега с проезжей части
Способ работы токоприемника на электрическом подвижном составе
Способ удаления гололеда с провода контактной сети
Способ очистки воздуха
Способ управления тормозами грузового железнодорожного состава
Способ контроля теплового состояния буксы грузового железнодорожного вагона
Способ управления тормозом грузового железнодорожного вагона
Способ работы тормоза грузового железнодорожного вагона
Способ спасения человека при кораблекрушении
Способ подкормки растений
Способ уборки снега с проезжей части
Способ работы токоприемника на электрическом подвижном составе
Способ удаления гололеда с провода контактной сети
Способ очистки воздуха

