Результат интеллектуальной деятельности: СИСТЕМА ЭЛЕКТРОПИТАНИЯ ПОДВИЖНОГО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА
Вид РИД
Изобретение
Изобретение относится к электротехнике, в частности к системам электроснабжения с резервированием источника при помощи аккумуляторной батареи, и может быть использовано для электропитания подвижных робототехнических комплексов, оснащенных бортовой информационно-вычислительной системой.
Известна система электроснабжения аппаратуры подвижного комплекса топопривязки (см. патент RU №2435280, H02J 3/04, H02J 9/06, 27.11.2011 г.), принятая за прототип.
Система электроснабжения аппаратуры подвижного комплекса топопривязки содержит основной и резервный источники электроэнергии, распределительное устройство, кабельные линии, коммутационные аппараты, автоматы защиты силовых цепей, аппаратуру контроля, электроустановку отбора мощности (генератор). Привод генератора оснащен электромагнитной муфтой. Система электроснабжения оснащена пультом контроля и управления, выполненным с возможностью контроля напряжений основного и резервного источников электроэнергии, контроля подачи напряжений на электродвигатели приводов механизмов подъема антенных устройств и электромагнитную муфту и управления механизмами подъема антенных устройств и электромагнитной муфтой. Распределительное устройство оснащено прибором для контроля напряжения бортовой сети и на входе через систему подготовки электропитания связано с генератором, а также с аккумуляторными батареями и штатным электрооборудованием автошасси, а на выходе - с пультом контроля и управления, соединительным щитком для подключения выносного оборудования, средствами навигации и топопривязки, измерителем мощности дозы и блоком терморегулирования воздуха зоны рабочих мест и тремя соединительными платами, первая из которых связана с программно-аппаратным комплексом подвижного комплекса, вторая - с системой связи и передачи данных, а третья - с оптическим прибором наблюдения и ориентирования, системой внутренней громкоговорящей связи, системой освещения зоны рабочих мест и счетчиком моточасов.
Недостатками прототипа являются:
- отсутствие автоматического поддержания напряжения питания приборов и системы, зарядки аккумуляторных батарей;
- недостаточная степень развития преобразовательных устройств, управляющих и согласующих устройств, устройств защиты бортовой сети от короткого замыкания, перегрузки и перенапряжения в цепи питания приборов;
- недостаточная степень защиты электрических цепей;
- невозможность применения системы в подвижных робототехнических комплексах.
Предлагаемым изобретением решается задача по повышению боевой эффективности подвижных робототехнических комплексов, имеющих в своем составе несколько потребителей электроэнергии различного функционального назначения и размещенных на подвижной дистанционно управляемой платформе.
Технический результат, получаемый при осуществлении изобретения, заключается в создании системы электропитания подвижного робототехнического комплекса, обеспечивающей бесперебойное экономичное электроснабжение информационно-вычислительных средств, аппаратуры навигации, системы связи и передачи данных, приводов исполнительных механизмов.
Указанный технический результат достигается тем, что в предлагаемой системе электропитания подвижного робототехнического комплекса, содержащей основной и резервный источники электроэнергии, распределительное устройство, кабельные линии, коммутационные аппараты, автоматы защиты силовых цепей, генератор и связанной с электрооборудованием шасси и исполнительных устройств, новым является то, что система электропитания робототехнического комплекса включает в себя первичный источник питания - две аккумуляторные батареи и бензиновый двигатель с генератором, который оборудован встроенным регулятором напряжения, выполненным с возможностью автоматического поддержания напряжения питания приборов комплекса и зарядки аккумуляторных батарей при изменении частоты вращения вала или тока нагрузки, вторичный источник питания - модульные преобразователи постоянного тока, блок сервоусилителей, которые используются в качестве модулей управления в приводах исполнительных механизмов коллекторными двигателями постоянного тока с обратной связью, алгоритм которой реализован с возможностью стабилизации положения, скорости или момента на валу двигателя и возможностью настройки и управления с персонального компьютера, блок управления и согласования, выполненный с возможностью согласования уровней диагностических сигналов подвижной платформы робототехнического комплекса и бортового вычислителя, а также усиления сигналов бортового вычислителя и выдачи их на исполнительные устройства, включающий в себя узел согласования диагностического сигнала подвижной платформы «Давление масла» с уровнем сигнала бортового вычислителя и узел усиления сигналов бортового вычислителя «Зажигание» и «Стартер».
Включение в систему электропитания робототехнического комплекса первичного источника питания - двух аккумуляторных батарей и бензинового двигателя с генератором позволяет:
- обеспечить за счет аккумуляторных батарей работу приборов, чувствительных к параметрам питающей бортовой сети;
- обеспечить работу систем робототехнического комплекса без питания от генератора в течение непродолжительного времени;
- создать необходимый уровень электрической мощности, позволяющий выполнить подключение достаточного количества потребителей с высоким потенциалом энергопотребления, размещенных на базе подвижной платформы робототехнического комплекса, в том числе, средств огневого поражения.
Наличие в генераторе встроенного регулятора напряжения, выполненного с возможностью автоматического поддержания напряжения питания приборов комплекса и зарядки аккумуляторных батарей при изменении частоты вращения вала или тока нагрузки, позволяет:
- снизить вероятность сбоев аппаратуры при возникновении нештатных ситуаций.
Включение в систему электропитания робототехнического комплекса вторичного источника питания - модульных преобразователей постоянного тока позволяет:
- обеспечить получение стабилизированного напряжения постоянного тока различного значения;
- обеспечить незашумленное питание слаботочных приборов;
- обеспечить защиту бортовой сети от короткого замыкания, перегрузки и перенапряжения в цепи питания приборов.
Включение в систему электропитания робототехнического комплекса блока сервоусилителей позволяет обеспечить управление приводными двигателями исполнительных механизмов.
Использование в приводах коллекторных двигателей постоянного тока с обратной связью позволяет:
- использовать данные двигатели в системах автоматизации, а также составе мехатронных и робототехнических систем;
- за счет алгоритмов обратной связи, реализованных в двигателе на базе мощного процессора, позволяют надежно стабилизировать положение, скорость или момент на валу двигателя;
- обеспечить возможность настройки и управления с персонального компьютера;
- обеспечить удобство работы при решении самых разнообразных задач.
Включение в систему электропитания робототехнического комплекса блока управления и согласования, выполненного с возможностью согласования уровней диагностических сигналов подвижной платформы робототехнического комплекса и бортового вычислителя, а также усиления сигналов бортового вычислителя и выдачи их на исполнительные устройства, позволяет обеспечить устойчивую работу всего комплекса аппаратных средств робототехнического комплекса.
Технические решения с признаками, отличающими заявляемое решение от прототипа, неизвестны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежами, где на
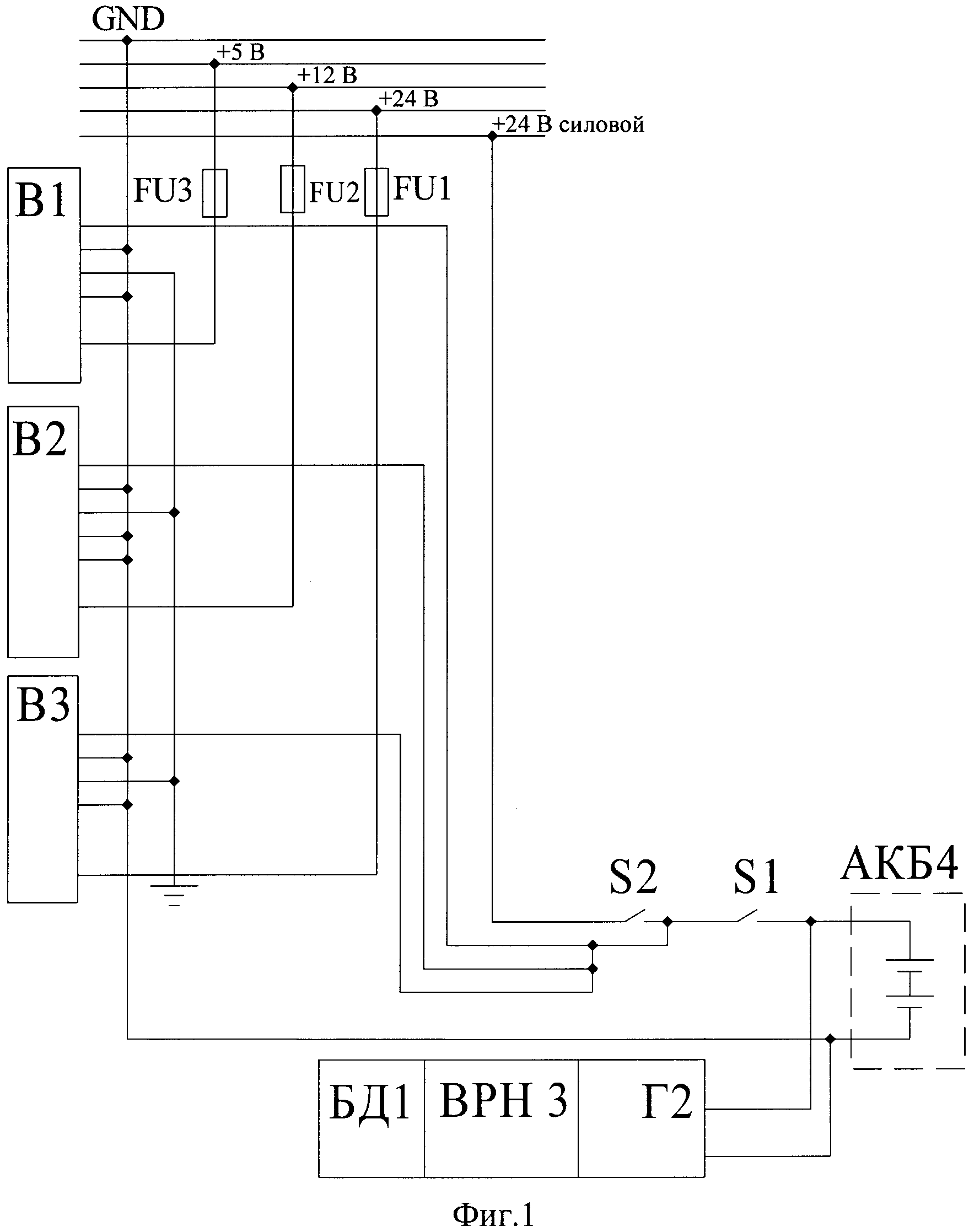
фиг. 1 - схема электрическая подключения модульных преобразователей;
фиг. 2 - схема электрическая подключения сервоусилителей;
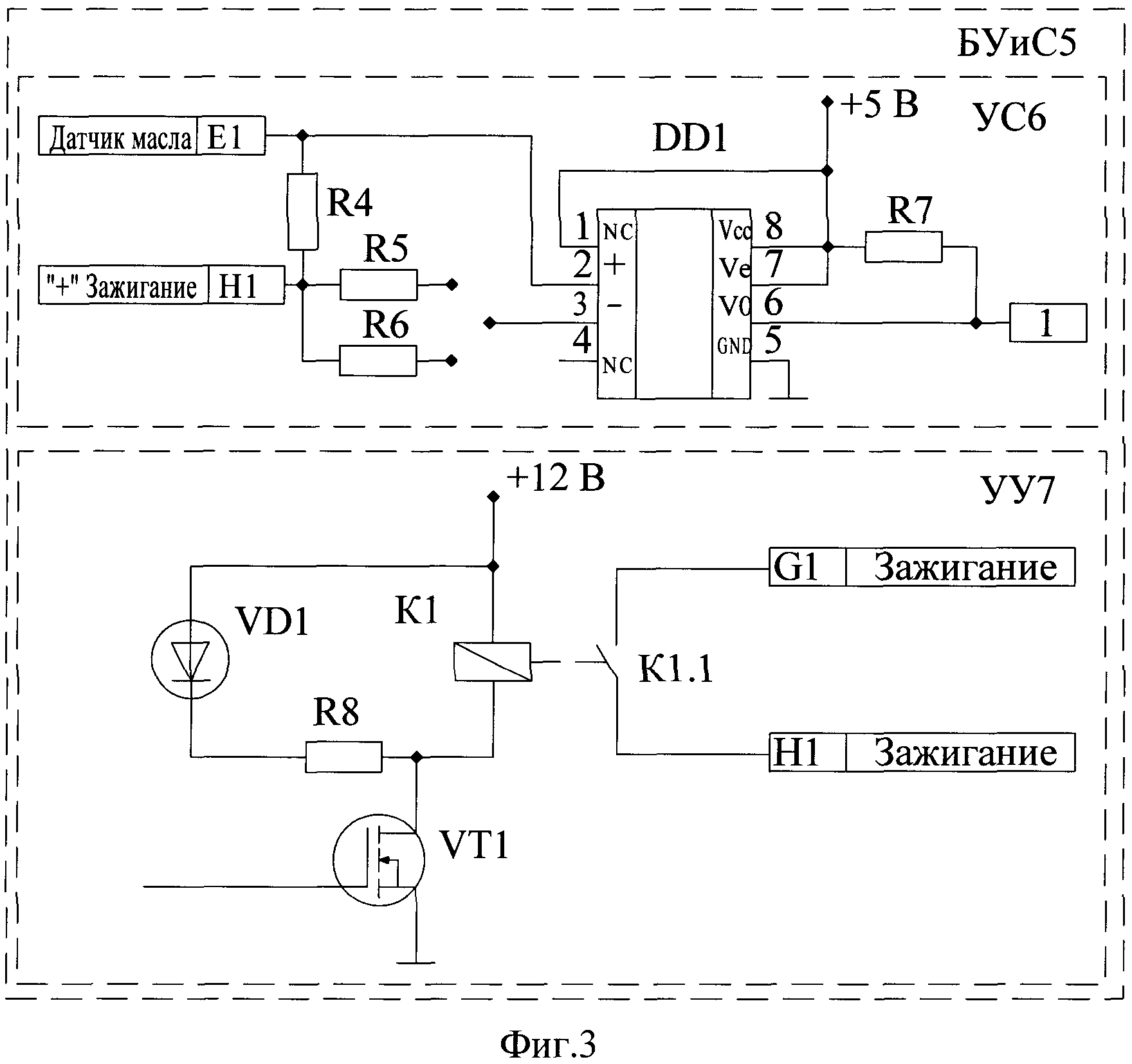
фиг. 3 - схема электрическая подключения принципиальная блока управления и согласования.
Система электропитания подвижного робототехнического комплекса размещена на базе подвижной платформы робототехнического комплекса и содержит первичный источник питания - бензиновый двигатель с электростартером (БД) 1, генератор (Г) 2 со встроенным регулятором напряжения (ВРН) 3 и две аккумуляторные батареи (АКБ) 4, вторичный источник питания - модульные преобразователи постоянного тока В1…В3, три плавких предохранителя FU1…FU3, силовые выключатели S1 и S2, сервоусилители А1, А2, A3, коллекторные двигатели постоянного тока М1, М2 и М3, потенциометры R1, R2 и R3, блок управления и согласования (БУиС) 5, состоящий из узла согласования (УС) 6 и узла усиления (УУ) 7.
Система электропитания подвижного робототехнического комплекса работает следующим образом.
Для обеспечения электропитанием агрегатов робототехнического комплекса в качестве первичного источника питания был применен Г 2 с приводом от БД 1 в комплекте с двумя АКБ 4. Наличие аккумуляторных батарей обуславливается наличием приборов, чувствительных к параметрам питающей бортовой сети, а также обеспечением работы системы без питания от Г 2 в течение непродолжительного времени. Генератор оборудован встроенным регулятором напряжения, обеспечивающим автоматическое поддержание напряжения питания приборов системы и зарядки АКБ при изменении частоты вращения вала или тока нагрузки. В качестве вторичного источника питания применены модульные преобразователи, которые обеспечивают преобразование постоянного напряжения бортовой сети 19…36 В:
1. В1 - SD-100 B-5 для питания приборов системы напряжением 5 В;
2. В2 - SD-350 B-12 для питания приборов системы напряжением 12 В;
3. В3 - SD-350 B-24 для питания приборов системы напряжением 24 В.
Данные преобразователи также обеспечивают защиту бортовой сети от короткого замыкания, перегрузки и перенапряжения в цепи питания приборов системы.
В качестве дополнительного элемента защиты в цепи питания приборов системы были введены три плавких предохранителя FU1..FU3 15 А.
Подача напряжения бортовой сети на модульные преобразователи и затем на приборы системы осуществляется силовым выключателем «S1», подача напряжения бортовой сети на сервоусилители А1, А2, A3, минуя модульные преобразователи, осуществляется силовым выключателем «S2».
Сервоусилители А1, А2 являются модулями управления коллекторными двигателями постоянного тока с обратной связью и обеспечивают управление коллекторными двигателями постоянного тока М1 и М2 путем считывания ширины импульсов управляющих сигналов 3,3 В, поступающих с бортового вычислителя, и выдачей управляющего напряжения с широтно-импульсной модуляцией 0…24 В на коллекторные двигатели. Обратная связь по положению реализована за счет установленных потенциометров R1 и R2, изменение сопротивления потенциометрического датчика пропорционально перемещению исполнительного механизма вызывает изменение уровня аналогового сигнала 0…3.3 В.
Сервоусилитель A3 является модулем управления коллекторным двигателем постоянного тока с обратной связью и обеспечивает управление коллекторным двигателем постоянного тока М3 путем считывания ширины импульсов управляющих сигналов 3,3 В, поступающих с бортового вычислителя, и выдачей управляющего напряжения с широтно-импульсной модуляцией 0…24 В на коллекторный двигатель. Обратная связь по положению реализована за счет потенциометра R3, изменение сопротивления потенциометрического датчика пропорционально углу поворота выходного вала исполнительного механизма вызывает изменение уровня аналогового сигнала 0…3,3 В.
БУиС 5 предназначен для согласования уровней диагностических сигналов подвижной платформы робототехнического комплекса и бортового вычислителя, а также усиления сигналов бортового вычислителя и выдачи их на исполнительные устройства.
Для согласования уровня диагностического сигнала подвижной платформы «Давление масла» с уровнем 12 В используется узел согласования 6, гальваническая изоляция обеспечивается за счет применения оптопары.
Сигнал «Давление масла» поступает на вывод «Е11» относительно «Н13». Прямоугольный TTL сигнал с уровнем 5 В, поступающий на бортовой вычислитель, снимается с вывода «V0». Напряжение питания узла 5 В.
Для усиления сигналов бортового вычислителя «Зажигание» и выдачи их на исполнительные устройства используется узел усиления 7. Сигнал управления представляет собой сигнал формы «меандр» с уровнем 3,3 В, сигнал подается на вход повторителя К155ЛП10, с выхода снимается сигнал формы «меандр» с уровнем 5 В, который поступает на затвор полевого транзистора VT1, управляющего электромагнитным реле К1.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании системы электропитания подвижного робототехнического комплекса, обеспечивающей бесперебойное экономичное электроснабжение информационно-вычислительных средств, аппаратуры навигации, системы связи и передачи данных, приводов исполнительных механизмов.
Система электропитания подвижного робототехнического комплекса, содержащая основной и резервный источники электроэнергии, распределительное устройство, кабельные линии, коммутационные аппараты, автоматы защиты силовых цепей, генератор и связанная с электрооборудованием шасси и исполнительных устройств, отличающаяся тем, что система электропитания робототехнического комплекса включает в себя первичный источник питания - две аккумуляторные батареи и бензиновый двигатель с генератором, который оборудован встроенным регулятором напряжения, выполненным с возможностью автоматического поддержания напряжения питания приборов комплекса и зарядки аккумуляторных батарей при изменении частоты вращения вала или тока нагрузки, вторичный источник питания - модульные преобразователи постоянного тока, блок сервоусилителей, которые используются в качестве модулей управления в приводах исполнительных механизмов коллекторными двигателями постоянного тока с обратной связью, алгоритм которой реализован с возможностью стабилизации положения, скорости или момента на валу двигателя и возможностью настройки и управления с персонального компьютера, блок управления и согласования, выполненный с возможностью согласования уровней диагностических сигналов подвижной платформы робототехнического комплекса и бортового вычислителя, а также усиления сигналов бортового вычислителя и выдачи их на исполнительные устройства, включающий в себя узел согласования диагностического сигнала подвижной платформы «Давление масла» с уровнем сигнала бортового вычислителя и узел усиления сигналов бортового вычислителя «Зажигание» и «Стартер».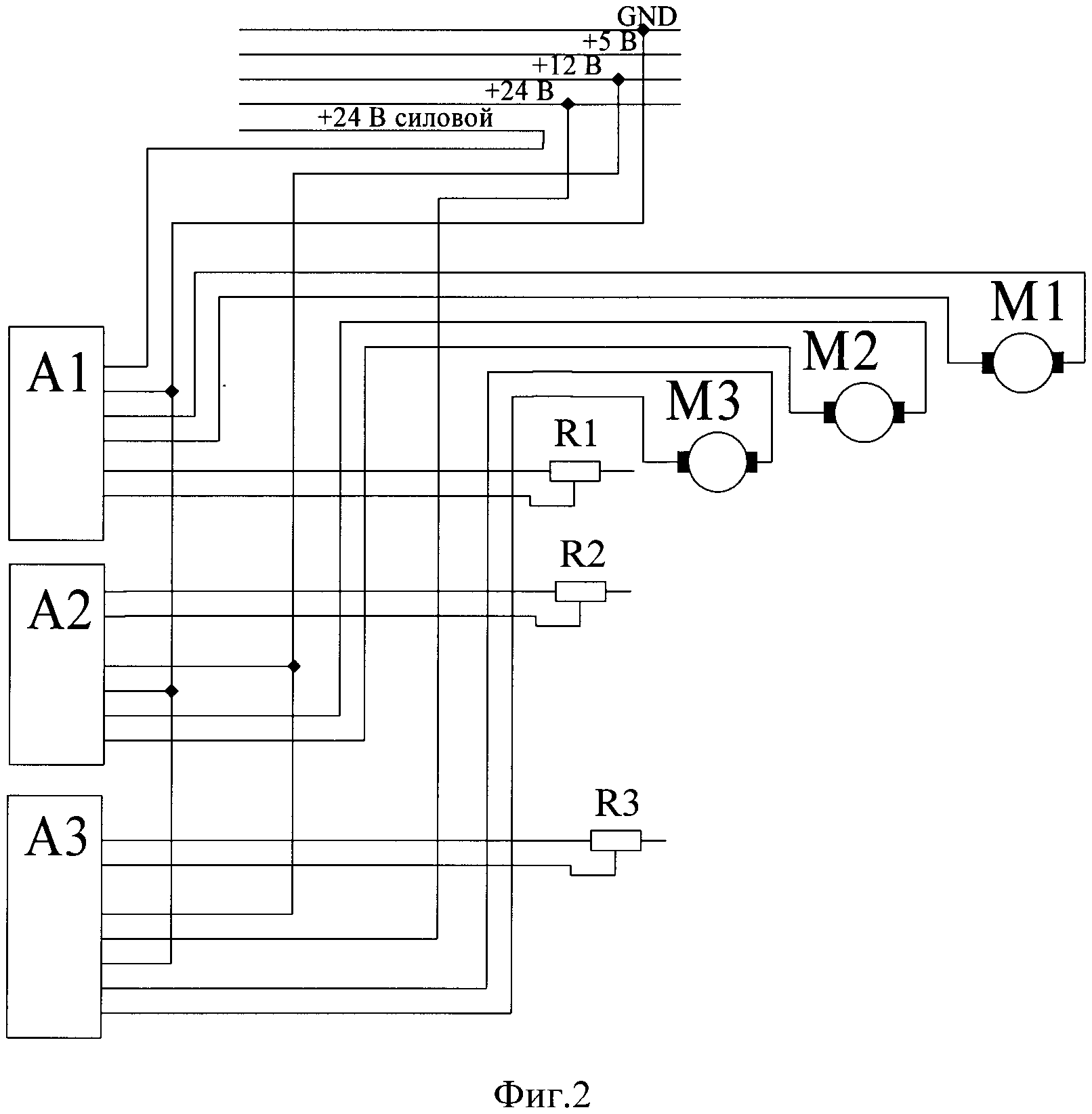
Автоматическое универсальное натяжное устройство для реверсивных цепных передач
Уравновешивающий механизм оружейной установки
Пулемет
Устройство затворное для испытательной камеры высокого давления
Устройство для обжима полых осесимметричных изделий
Способ снаряжения ленты боеприпасами и устройство для его осуществления
Способ изготовления тонкостенных оболочек с дном
Способ анализа качества формирования и передачи дифференциальных поправок по запросу от топопривязчика потребителю
Способ оценки параметров боевого дистанционно-управляемого модуля и трансформируемый комплекс для его реализации
Способ оценки эффективности стрельбы боевого дистанционно-управляемого модуля, размещенного на подвижном объекте
Автоматическое универсальное натяжное устройство для реверсивных цепных передач
Уравновешивающий механизм оружейной установки
Пулемет
Устройство затворное для испытательной камеры высокого давления
Устройство для обжима полых осесимметричных изделий
Способ снаряжения ленты боеприпасами и устройство для его осуществления
Способ изготовления тонкостенных оболочек с дном
Способ анализа качества формирования и передачи дифференциальных поправок по запросу от топопривязчика потребителю
Способ оценки параметров боевого дистанционно-управляемого модуля и трансформируемый комплекс для его реализации
Способ оценки эффективности стрельбы боевого дистанционно-управляемого модуля, размещенного на подвижном объекте

