Результат интеллектуальной деятельности: ШАССИ КОЛЕСНОГО РОБОТА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к области робототехники и предназначено для построения колесных андроидных роботов, используемых внутри помещений.
Уровень техники
Робот, используемый внутри помещений, должен обладать высокой маневренностью и способностью преодолевать пороги в дверных проемах.
Колесные андроидные роботы изготавливаются одноколесными, двухколесными, трехколесными, четырехколесными, шестиколесными. Достоинством одно- и двухколесных роботов является их высокая маневренность и возможность преодоления порогов благодаря большому диаметру колес. Высокая маневренность достигается благодаря тому, что каждое из двух колес имеет свой привод и поворот выполняется путем вращения колес в противоположных направлениях. Однако при выключенном питании такой робот теряет устойчивость, а применение третьего (поддерживающего) колеса или опорной планки для сохранения устойчивости не решает проблемы, поскольку площадь образующейся опоры недостаточно высока. Учитывая, что типовой вес андроидных роботов составляет 40-80 кг, использование одно- и двухколесных роботов в доме может нанести вред здоровью окружающих при потере роботом устойчивости.
Более устойчивым и одновременно маневренным является трехколесный робот при условии использования трех всенаправленных ведущих колес [см., например, патент US 2013/0226340 A1, фиг.3]. Однако такие колеса сложны, что приводит к их высокой стоимости.
При использовании же трех обычных жестко закрепленных колес с одним пассивным колесом в случае поворота робота третье (пассивное) колесо движется юзом, что требует излишних затрат энергии, мощности двигателей и приводит к ускоренному износу колеса. Аналогичная проблема возникает при использовании четырех жестко закрепленных обычных колес.
Указанная проблема юза может быть решена применением поворачивающихся передних колес (см., например, http://www.ais.uni-bonn.de/nimbro/@Home/images/GO13/GO13_NimbRo_RIPS.jpg), но это существенно усложняет конструкцию приводов колес и увеличивает стоимость шасси.
Заметим, что трехколесное шасси менее устойчиво, чем четырехколесное при тех же продольных и поперечных размерах робота. Поэтому в настоящем изобретении используется четырехколесное шасси.
Проблему юза четырехколесного шасси можно решить, используя два ведущих колеса и два пассивных (ведомых) колеса, если пассивные колеса выполнены так, что во время качения могут вращаться на шарнирах вокруг вертикальной оси. Такие колеса обычно используют для офисных кресел на колесиках. Шасси такой конструкции имеет высокую маневренность и одновременно высокую устойчивость. Из эргономических и конструктивных соображений для упрощения и обеспечения малых размеров шасси пассивные колеса удобно выбирать гораздо меньшего диаметра, чем ведущие колеса, которые выбирают исходя из высоты порогов в доме. Например, для порогов высотой 10 см диаметр ведущего колеса шасси робота должен быть более 20 см.
Однако при использовании пассивных колес малого диаметра (например, 4-5 см) переезд такого шасси через порог, высота которого больше половины диаметра пассивных колес, становится невозможным.
Известно шасси колесного робота (Патент CN 101554726 B), содержащее два колеса, устойчивость которого обеспечивается системой автоматического регулирования (САР). Недостатком этого устройства является потеря устойчивости при поломке САР, что недопустимо в описываемом применении, а также высокая сложность системы САР.
Известно также шасси [US 2012/0061155 A1, fig.2E], содержащее четыре колеса, каждое из которых может поворачиваться вокруг вертикальной оси. Недостатком этого устройства является высокая сложность, поскольку каждое из колес требует двух отдельных двигателей для вращения вокруг как горизонтальной, так и вертикальной оси (для поворачивании шасси).
Наиболее близким к предлагаемому устройству (прототипом) является шасси колесного робота [http://msdn.microsoft.com/en-us/library/bb648760.aspx], содержащее два больших ведущих и два маленьких пассивных колеса, которые могут вращаться вокруг вертикальной оси, что предохраняет колеса от юза, причем переднее пассивное колесо расположено впереди ведущих колес, заднее - позади них. Для разворота на месте используется вращение ведущих колес в противоположных направлениях. Недостатком прототипа является невозможность преодоления порогов, поскольку при наезде передним пассивным колесом на порог одно из ведущих колес отрывается от пола.
Сущность изобретения
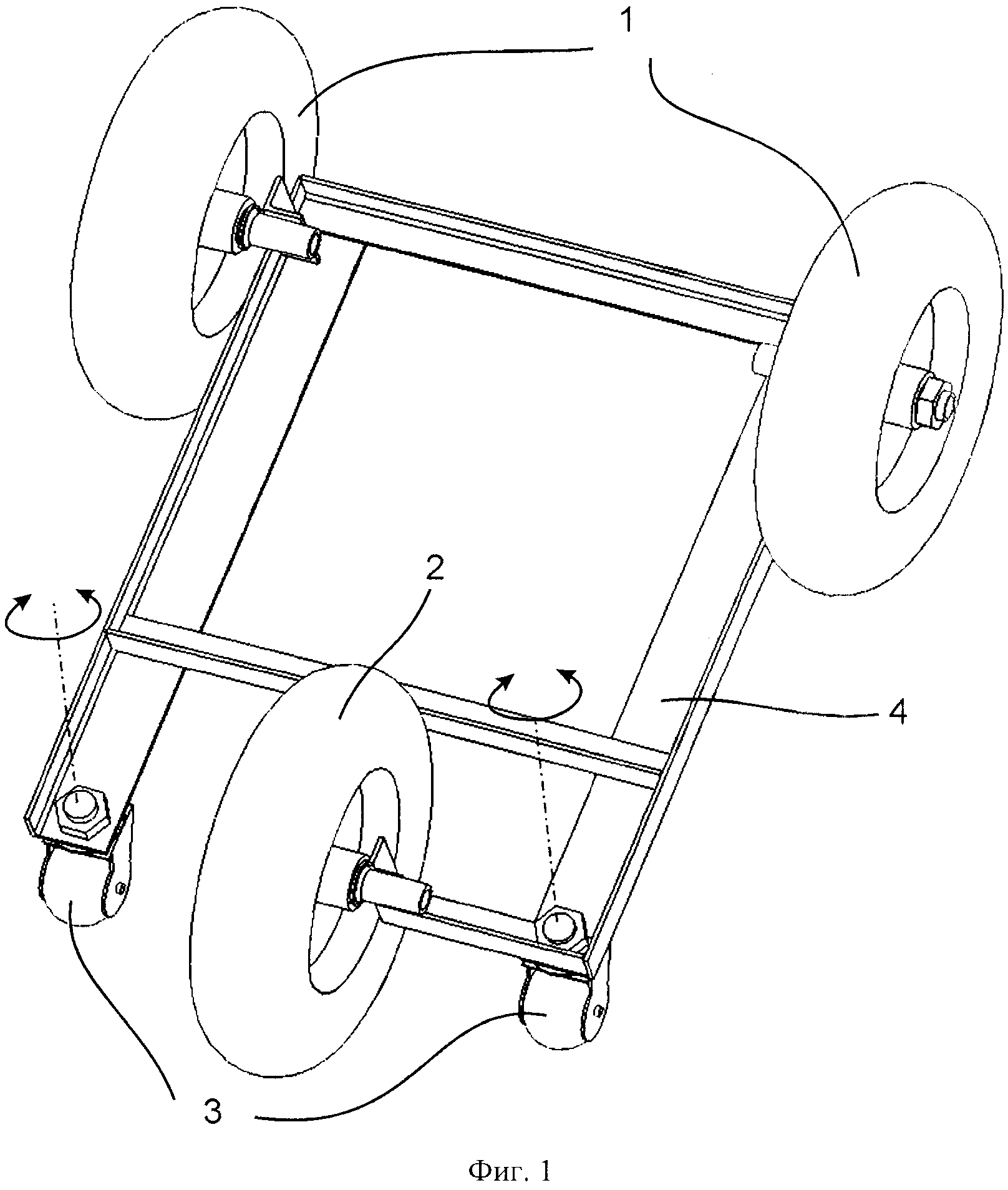
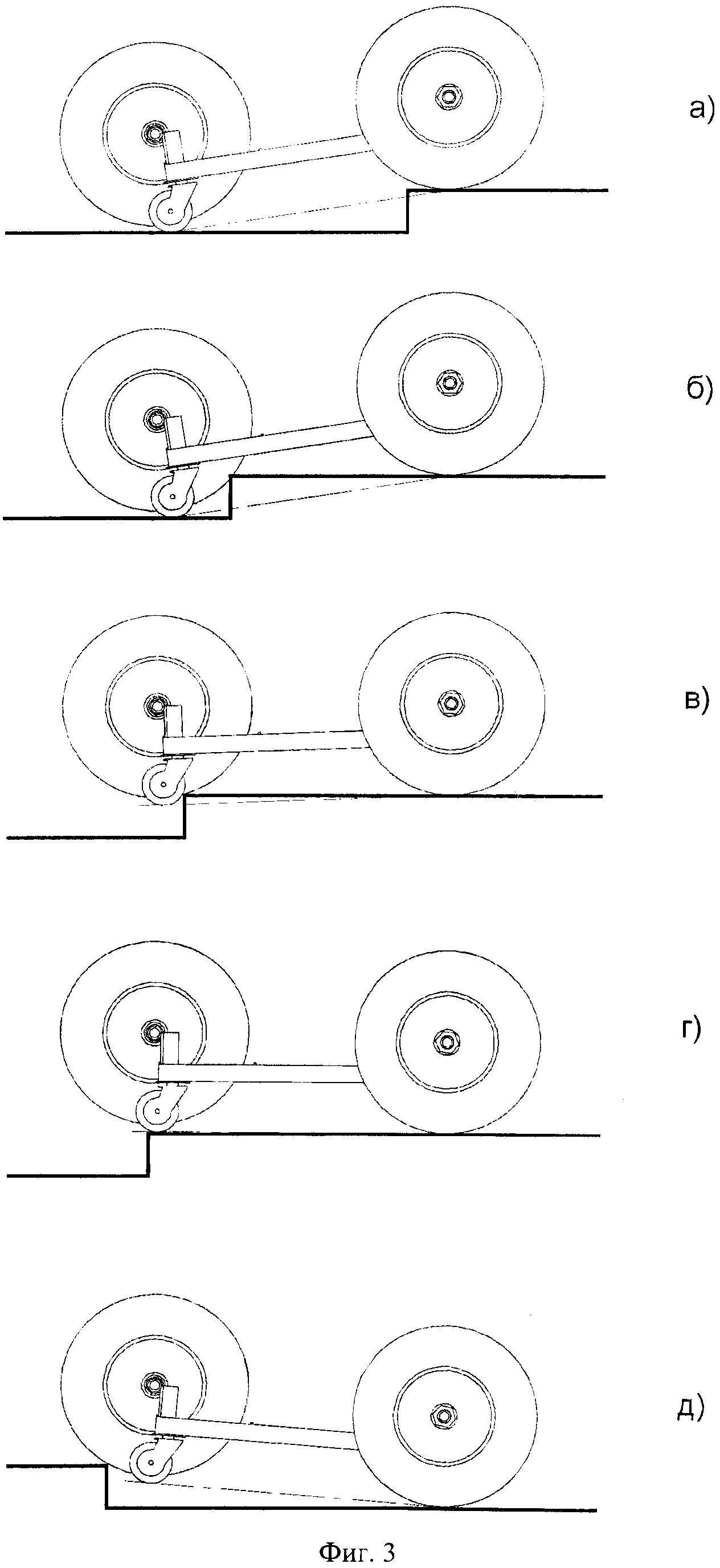
В предлагаемом изобретении используются также два больших ведущих колеса 1 (фиг.1) с жестко закрепленными осями и два маленьких пассивных колеса 3, имеющих возможность свободно вращаться вокруг вертикальной оси. Однако, в отличие от прототипа, ведущие колеса 1 расположены впереди прямоугольной рамы 4, а оба пассивных колеса 3 - сзади рамы 4 и введено дополнительно большое пятое колесо 2 с жестко закрепленной осью, которое является пассивным и установлено посредине между двумя пассивными колесами 3 так, что при движении по ровному полу оно не касается пола, а имеется зазор 5 (фиг.2) величиной не более половины диаметра пассивного колеса, поэтому движение шасси выполняется на четырех колесах. При переезде через порог (фиг.3, а-д) пятое колесо касается порога (фиг.3, б) и принимает нагрузку на себя (фиг 3, б-в), затем приподнимает раму и с ней маленькие пассивные колеса до уровня, когда они могут переехать через порог (фиг.3, в), далее нагрузку принимают на себя маленькие пассивные колеса (фиг.3, г), далее, при съезде с порога, нагрузку с маленьких колес опять принимает на себя большое пятое колесо (фиг.3, д).
Техническим результатом описанной конструкции шасси является возможность переезда через порог при сохранении максимально возможной устойчивости шасси на плоской поверхности (поскольку колеса расположены по углам прямоугольной рамы) и высокой маневренности (поскольку шасси позволяет выполнить разворот на месте путем вращения ведущих колес в противоположных направлениях).
Перечень фигур чертежей и иных материалов
Фиг.1 - общий вид шасси колесного робота. Здесь 1 - два ведущих колеса; 2 - пятое колесо; 3 - два пассивных колеса; 4 - рама.
Фиг.2 - вид сбоку на шасси колесного робота. Здесь 1 - два ведущих колеса: 2 - пятое колесо; 3 - два пассивных колеса; 4 - рама; цифрой 5 обозначен зазор между пятым колесом и поверхностью, по которой движется шасси.
Фиг.3 - иллюстрация процесса переезда шасси через порог.
Сведения, подтверждающие возможность осуществления изобретения
Осуществляется изобретение в соответствии с описанием в разделе "Сущность изобретения", важным является выбор положения пятого колеса. Зазор между пятым колесом и поверхностью пола выбирается не более половины диаметра пассивных колес, но больше высоты неровностей поверхности между колесами, по которой движется шасси. Например, этот зазор может быть равен 1 см.
Работа устройства очень проста, описана в разделе "Сущность изобретения" и иллюстрируется фиг.3.
По мнению автора, сущность заявляемого изобретения не следует для специалиста явным образом из известного уровня техники, поскольку существует большое количество (более сотни) патентов на шасси роботов, а также действующих образцов шасси, ни одно из которых не содержит описанного выше решения и одновременно все они имеют такие недостатки, как плохая устойчивость, плохая маневренность, невозможность переезда через порог либо гораздо более сложны.
Предложенная конструкция шасси робота испытана экспериментально, достаточно проста, технологична и в настоящее время готовится технологическая оснастка для ее серийного производства.
Шасси колесного робота, используемого внутри помещений, содержащее прямоугольную раму, два ведущих колеса, выполненные большего диаметра и с жестко закрепленными осями, и два пассивных колеса, выполненные меньшего диаметра и свободно вращающимися вокруг вертикальной оси, отличающееся тем, что оно снабжено пятым пассивным колесом, выполненным большего диаметра и с жестко закрепленной осью, при этом ведущие колеса расположены по углам впереди рамы, два пассивных колеса меньшего диаметра - по углам сзади рамы, а пятое пассивное колесо расположено посредине между пассивными колесами меньшего диаметра, причем расстояние от нижней точки пятого колеса до пола меньше половины диаметра пассивных колес меньшего диаметра.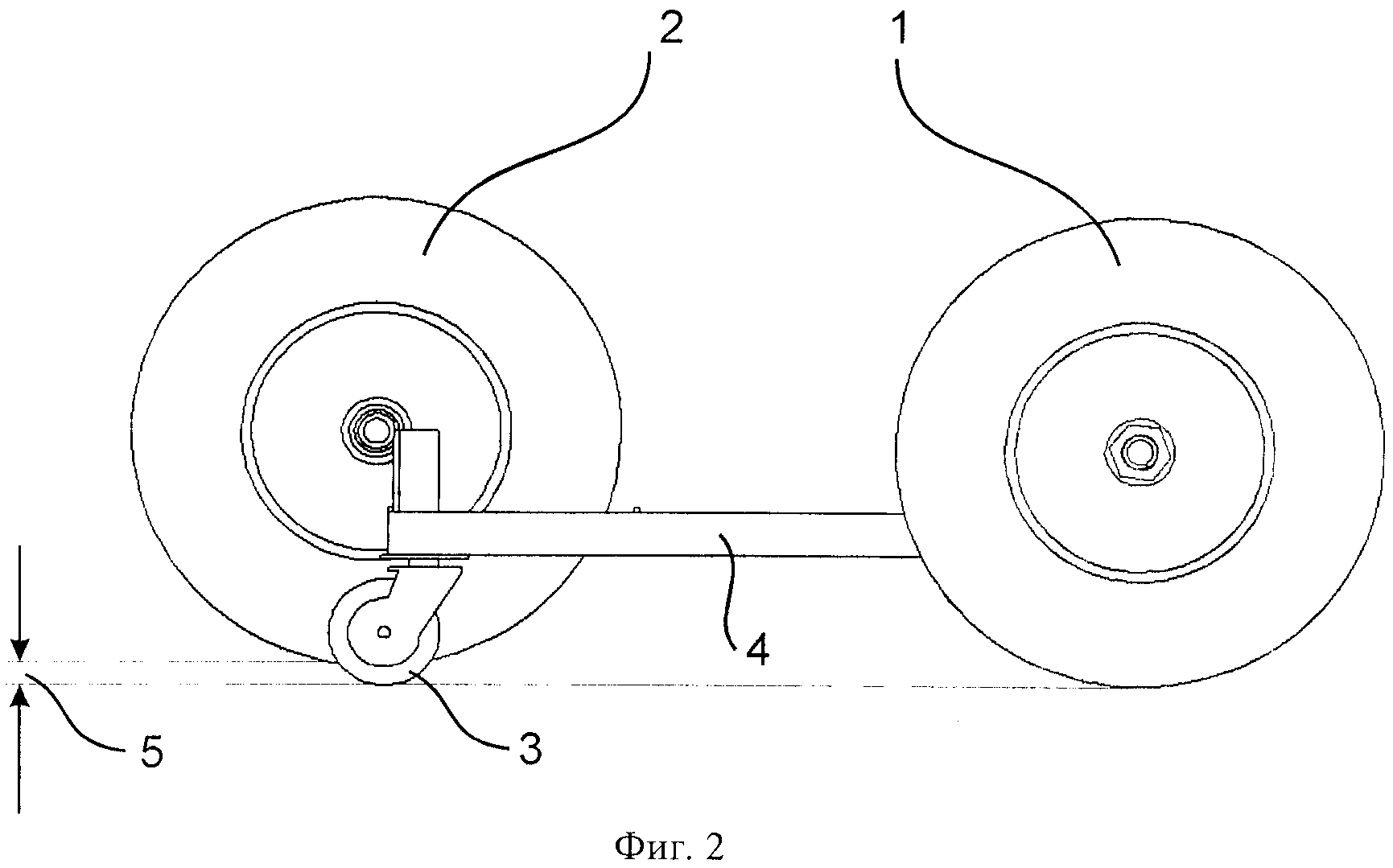
Искробезопасный источник питания
Лотовый измеритель уровня
Кисть руки робота
Устройство подъема и опускания торса робота
Сустав руки робота
Кисть руки робота
Устройство подъема и опускания торса робота
Сустав руки робота

