Результат интеллектуальной деятельности: ФУНКЦИОНАЛЬНАЯ СТРУКТУРА КОРРЕКТИРУЮЩЕГО ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ ТОРОИДАЛЬНОЙ РОБОТОТЕХНИЧЕСКОЙ СИСТЕМЫ ВДОЛЬ ХИРУРГИЧЕСКОГО СТОЛА ДЛЯ ВЫПОЛНЕНИЯ КОНКРЕТНОЙ МЕДИЦИНСКОЙ ПРОЦЕДУРЫ (ВАРИАНТ РУССКОЙ ЛОГИКИ)
Вид РИД
Изобретение
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известно устройство продольного возвратно-поступательного настеночного смещения сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления, при этом введена цилиндрическая направляющая, зафиксированная вдоль стены, в нижней части которой выполнен продольный паз, где расположена нижняя часть устройства продольного возвратно-поступательного смещения с зафиксированным опорным подшипником, функционально связанного с продольной планкой, которая зафиксирована с нижней части цилиндрической направляющей, на верхней части устройства продольного возвратно-поступательного смещения последовательно расположены две пары подшипников, смещенных относительно друг друга, и функционально связанных с двумя продольными опорными направляющими, одна из которых вместе с цилиндрической направляющей зафиксирована вдоль стены и на ее верхней части расположена зубчатая поверхность, функционально связанная с первой шестеренкой привода продольного смещения, на противоположной оси которой расположена вторая шестеренка, функционально связанная со второй продольной зубчатой поверхностью планки, которая закреплена внутри верхней части цилиндрической направляющей, при этом нижняя часть устройства продольного возвратно-поступательного смещения закреплена на оси ротора привода разворота робототехнической системы для совместного возвратно-поступательного смещения (прототип).
Известный прототип имеет технические возможности, которые заключаются в том, что реализовано смещение робототехнической системы с выдвижными элементами для проведения медицинских процедур вдоль медицинского стола.
Недостатком известной функциональной структуры продольного возвратно-поступательного настеночного смещения робототехнической системы с исполнительными выдвижными элементами вдоль медицинского стола является сложность конструкции, поскольку медицинский стол и робототехническая система не выполнены в виде функциональной единой структуры.
Техническим результатом предложенного изобретения является усовершенствование известной функциональной структуры робототехнической системы с медицинским столом.
Указанный технический результат достигается следующей функциональной структурой.
Функциональная структура корректирующего возвратно-поступательного продольного перемещения тороидальной робототехнической системы вдоль хирургического стола для выполнения конкретной медицинской процедуры, включающая корпус медицинского хирургического стола, который выполнен из неподвижной в продольном направлении нижней части медицинского стола и с возможностью возвратно-поступательного смещения верхней части медицинского стола, в котором в нижней продольной его части симметрично на некотором расстоянии друг от друга с равным шагом закреплены опорные подшипники продольного смещения, которые с возможностью продольного смещения расположены на верхней поверхности неподвижной в продольном направлении нижней части медицинского стола, а между рядами опорных подшипников зафиксированы или выполнены две линейные шестеренки, которые функционально соединены с первой и второй шестеренками соответственно, а также включает привод с редуктором возвратно-поступательного смещения верхней части медицинского стола, а также включает привод с редуктором продольного возвратно-поступательного смещения корпуса робототехнической системы вместе с выдвижными элементами вдоль хирургического стола для проведения медицинских процедур, при этом шестеренка привода с редуктором продольного возвратно-поступательного смещения функционально соединена с промежуточной шестеренкой, которая зафиксирована на общей оси, на концах которой закреплены исполнительные шестеренки возвратно-поступательного смещения корпуса робототехнической системы с выдвижными элементами, а также включает дополнительные подшипники,
при этом неподвижная в продольном направлении нижняя часть медицинского стола выполнена из двух соединенных между собой половин, между которыми неподвижно расположены дополнительные подшипники и они позиционно закреплены на общей оси между двумя исполнительными шестеренками и с возможностью возвратно-поступательного смещения корпуса робототехнической системы, которые функционально соединены с первой и второй дополнительными линейными шестеренками, которые закреплены или выполнены на горизонтально ориентированных частях первого и второго уголка, которые расположены на верхней поверхности противоположных в продольном направлении продольных частях нижней половины неподвижного медицинского стола, а на вертикально ориентированных частях как первого уголка, так и второго уголка с равным шагом зафиксированы дополнительные подшипники, функционально связанные с верхней поверхностью на противоположных продольных частей нижней половины неподвижного медицинского стола, при этом на вертикально ориентированной части как на первом уголке, так и на втором уголке закреплены нижние концы двух изогнутых стержней, верхние концы которых зафиксированы в нижней части корпуса робототехнической системы с выдвижными элементами, который выполнен тороидальной формы с выдвижной крышкой.
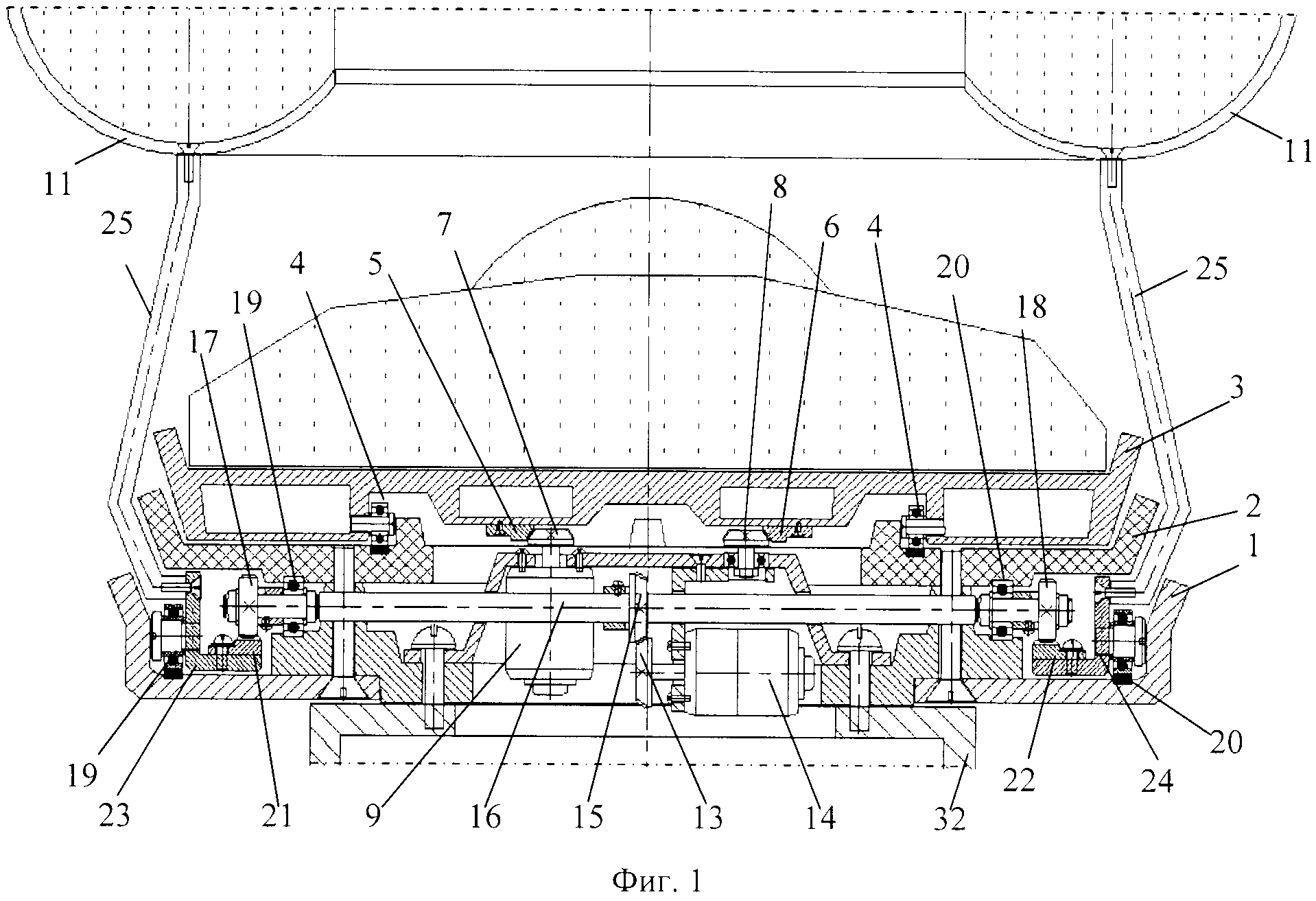
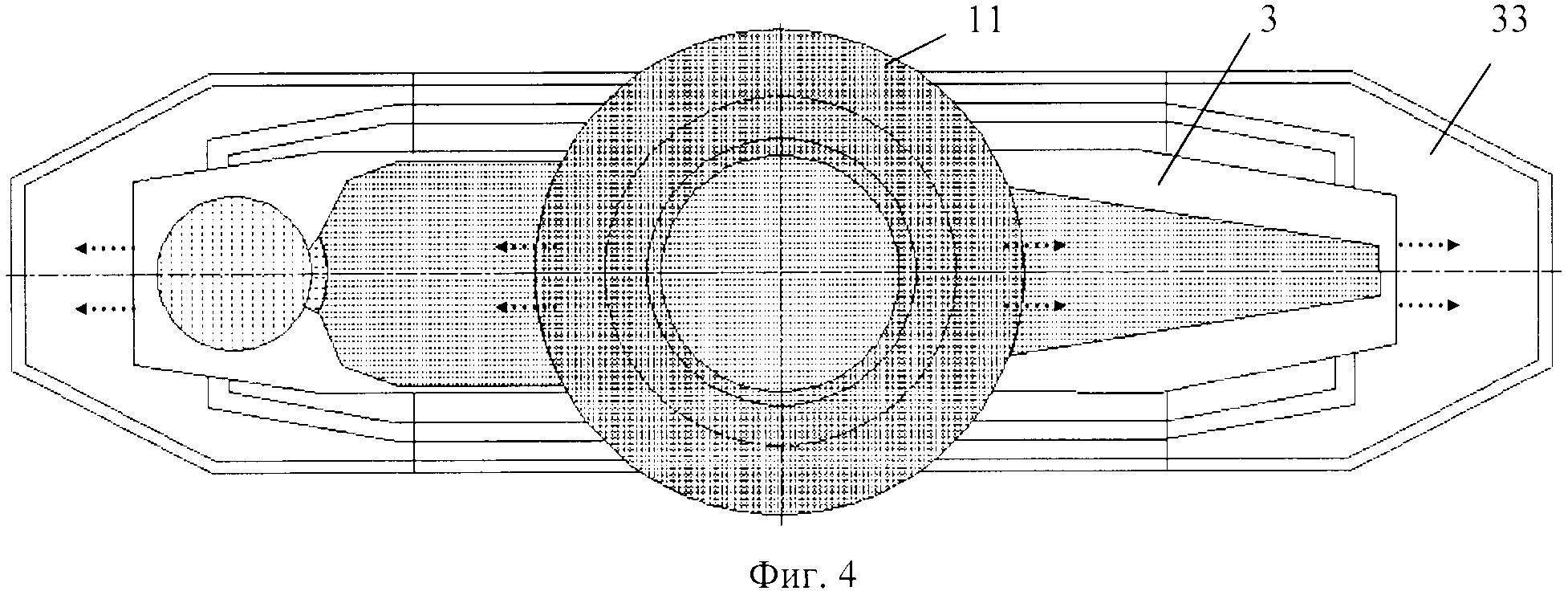
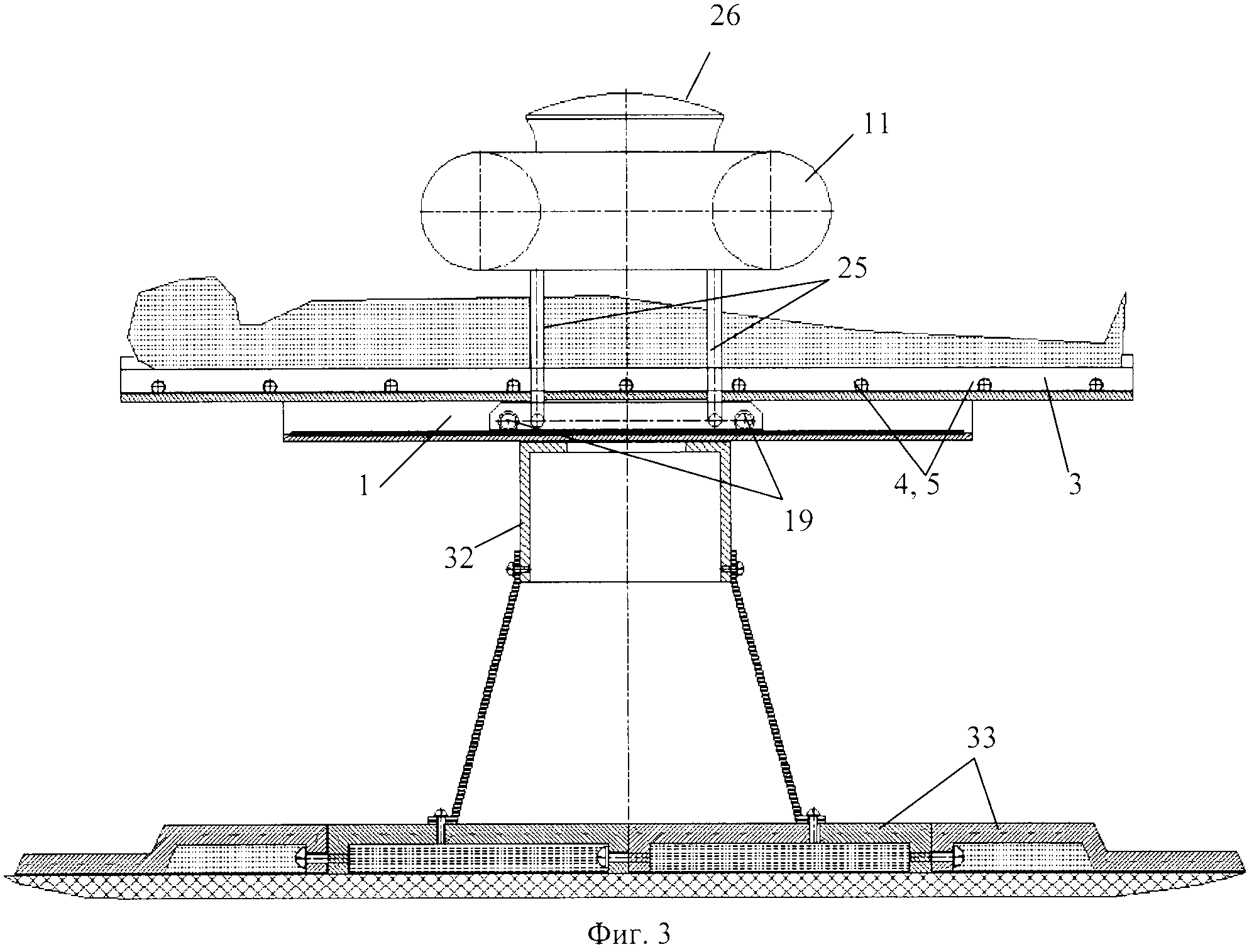
На фиг. 1 изображена функциональная структура корректирующего возвратно-поступательного продольного перемещения тороидальной робототехнической системы вдоль хирургического стола для выполнения конкретной медицинской процедуры. На фиг. 2 изображена тороидальная робототехническая система с выдвижной крышкой и исполнительными выдвижными элементами для выполнения различных медицинских процедур. На фиг. 3 и 4 изображен напольный вариант тороидальной робототехнической системы с выдвижной крышкой.
Функциональная структура корректирующего возвратно-поступательного продольного перемещения тороидальной робототехнической системы вдоль хирургического стола для выполнения конкретной медицинской процедуры, включающая корпус медицинского хирургического стола, который выполнен из неподвижной в продольном направлении нижней части медицинского стола 1, 2 и с возможностью возвратно-поступательного смещения верхней части медицинского стола 3, в котором в нижней продольной его части симметрично на некотором расстоянии друг от друга с равным шагом закреплены опорные подшипники 4 продольного смещения, которые с возможностью продольного смещения, расположены на верхней поверхности неподвижной в продольном направлении нижней части медицинского стола 2, а между рядами опорных подшипников 4 зафиксированы или выполнены две линейные шестеренки 5 и 6, которые функционально соединены с первой и второй шестеренками 7 и 8 соответственно, а также включает привод с редуктором 9 возвратно-поступательного смещения верхней части медицинского стола 3, а также включает привод с редуктором 10 продольного возвратно-поступательного смещения корпуса робототехнической системы 11 (фиг. 2) вместе с выдвижными элементами 12 вдоль хирургического стола для проведения медицинских процедур, при этом шестеренка 13 привода с редуктором 14 продольного возвратно-поступательного смещения функционально соединена с промежуточной шестеренкой 15, которая зафиксирована на общей оси 16, на концах которой закреплены исполнительные шестеренки 17 и 18 возвратно-поступательного смещения корпуса 11 робототехнической системы с выдвижными элементами 12, а также включает дополнительные подшипники, при этом неподвижная в продольном направлении нижняя часть медицинского стола выполнена из двух соединенных между собой половин 1 и 2, между которыми неподвижно расположены дополнительные подшипники 19 и 20, и они позиционно закреплены на общей оси 16 между двумя исполнительными шестеренками 17 и 18 возвратно-поступательного смещения корпуса 11 робототехнической системы, которые функционально соединены с первой 21 и второй 22 дополнительными линейными шестеренками, которые закреплены или выполнены на горизонтально ориентированных частях первого 23 и второго 24 уголка, которые расположены на верхней поверхности противоположных в продольном направлении продольных частях нижней половины неподвижного медицинского стола 1, а на вертикально ориентированных частях как первого уголка 23, так и второго уголка 24 с равным шагом зафиксированы дополнительные подшипники 19, функционально связанные с верхней поверхностью на противоположных продольных частей нижней половины 1 неподвижного медицинского стола, при этом на вертикально ориентированной части как на первом уголке 23, так и на втором уголке 24 закреплены нижние концы двух изогнутых стержня 25, верхние концы которых зафиксированы в нижней части корпуса 11 робототехнической системы с выдвижными элементами 12, который выполнен тороидальной формы с выдвижной крышкой. При этом медицинский хирургический стол также включает корпус 11 тороидальной робототехнической системы (фиг. 2) с выдвижной крышкой 26 с устройством разворота 27 электромагнитных фиксаторов 28 с корпусами медицинских инструментов 29, а также включает выдвижные элементы 12 для выполнения медицинских процедур, которые зафиксированы на круглой пластине 30 с шестеренкой, функционально связанной с шестеренкой привода разворота 31 их. При этом медицинский хирургический стол 1 закреплен на вертикальной опоре 32 (фиг. 3, 4), которая зафиксирована на неподвижном основании 33.
Логико-динамический процесс функционального корректирующего возвратно-поступательного продольного перемещения тороидальной робототехнической системы вдоль хирургического стола для выполнения конкретной медицинской процедуры, которая выполняет различные медицинские процедуры.
Поскольку медицинские процедуры выполняют в различных зонах пациента, поэтому как корпус 11 робототехнической системы, так и верхняя подвижная часть 3 медицинского стола должна быть выполнена с возможностью возвратно-поступательного продольного смещения, и его выполняют во взаимно противоположных направлениях. При этом смещение верхней подвижной части 3 медицинского стола реализуют посредством привода с редуктором 9 (фиг. 1) и линейной шестеренки 5. А возвратно-поступательное смещение робототехнической системы, которая включает корпус 11 тороидальной робототехнической системы (фиг. 2) с выдвижной крышкой 26 с устройством разворота 27 электромагнитных фиксаторов 28 с корпусами медицинских инструментов 29, а также включает выдвижные элементы 12 для выполнения медицинских процедур, выполняют посредством привода с редуктором 14, шестеренка которого функционально соединена с промежуточной шестеренкой 15, которая зафиксирована на общей оси 16, на концах которой закреплены исполнительные шестеренки 17 и 18 возвратно-поступательного смещения корпуса 11 робототехнической системы с выдвижными элементами 12, который посредством двух пар изогнутых стержней на вертикальной части соответствующего уголка 23 и 24 и посредством дополнительных подшипников 19 и 20 может перемещаться на верхней поверхности неподвижного медицинского стола 1, поскольку первая 21 и вторая 22 дополнительная линейная шестеренка уголков 23 и 24 функционально соединена с исполнительными шестеренками 17 и 18 оси вращения 16.
Использование предложенного технического решения позволяет расширить функциональные возможности функциональной структуры корректирующего возвратно-поступательного продольного перемещения тороидальной робототехнической системы вдоль хирургического стола для выполнения конкретной медицинской процедуры.
Функциональная структура корректирующего возвратно-поступательного продольного перемещения тороидальной робототехнической системы вдоль хирургического стола для выполнения конкретной медицинской процедуры, включающая корпус медицинского хирургического стола, который выполнен из неподвижной в продольном направлении нижней части медицинского стола и с возможностью возвратно-поступательного смещения верхней части медицинского стола, в котором в нижней продольной его части симметрично на некотором расстоянии друг от друга с равным шагом закреплены опорные подшипники продольного смещения, которые с возможностью продольного смещения расположены на верхней поверхности неподвижной в продольном направлении нижней части медицинского стола, а между рядами опорных подшипников зафиксированы или выполнены две линейные шестеренки, которые функционально соединены с первой и второй шестеренками соответственно, а также включает привод с редуктором возвратно-поступательного смещения верхней части медицинского стола, а также включает привод с редуктором продольного возвратно-поступательного смещения корпуса робототехнической системы вместе с выдвижными элементами вдоль хирургического стола для проведения медицинских процедур, при этом шестеренка привода с редуктором продольного возвратно-поступательного смещения функционально соединена с промежуточной шестеренкой, которая зафиксирована на общей оси, на концах которой закреплены исполнительные шестеренки возвратно-поступательного смещения корпуса робототехнической системы с выдвижными элементами, а также включает дополнительные подшипники, отличающаяся тем, что при этом неподвижная в продольном направлении нижняя часть медицинского стола выполнена из двух соединенных между собой половин, между которыми неподвижно расположены дополнительные подшипники, и они позиционно закреплены на общей оси между двумя исполнительными шестеренками и с возможностью возвратно-поступательного смещения корпуса робототехнической системы, которые функционально соединены с первой и второй дополнительными линейными шестеренками, которые закреплены или выполнены на горизонтально ориентированных частях первого и второго уголка, которые расположены на верхней поверхности противоположных в продольном направлении продольных частях нижней половины неподвижного медицинского стола, а на вертикально ориентированных частях как первого уголка, так и второго уголка с равным шагом зафиксированы дополнительные подшипники, функционально связанные с верхней поверхностью на противоположных продольных частей нижней половины неподвижного медицинского стола, при этом на вертикально ориентированной части как на первом уголке, так и на втором уголке закреплены нижние концы двух изогнутых стержней, верхние концы которых зафиксированы в нижней части корпуса робототехнической системы с выдвижными элементами, который выполнен тороидальной формы с выдвижной крышкой.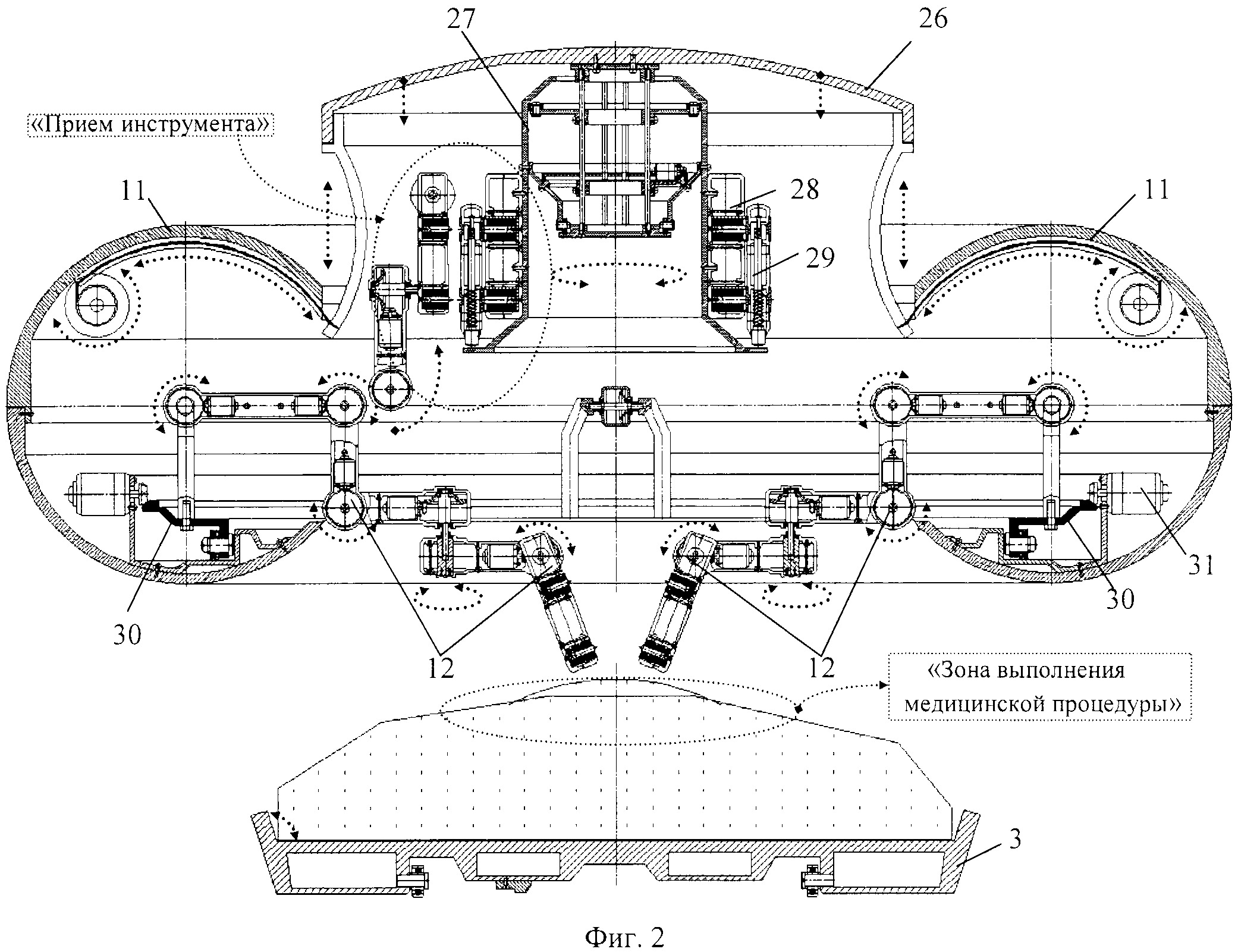
Функциональная первая входная структура условно "j" разряда сумматора f(σ) с максимально минимизированным технологическим циклом ∆t для аргументов слагаемых [n]f(2) и [m]f(2) формата "дополнительный код ru" с формированием промежуточной суммы (s) "уровня 2" и (s) "уровня 1" первого слагаемого в том же формате (варианты русской логики)
Функциональная вторая входная структура условно разряда "j" сумматора f(σ) с максимально минимизированным технологическим циклом ∆t для аргументов слагаемых [n]f(2) и [m]f(2) формата "дополнительный код ru" с формированием промежуточной суммы [s] второго слагаемого в том же формате (варианты русской логики)
Функциональная структура цифроаналогового преобразования позиционно-знаковых структур аргументов аналоговых сигналов m&[m]f(2) формата "дополнительный код ru" в аналоговый сигнал управления uf([m]) (вариант русской логики)
Способ формирования аргументов аналоговых сигналов частичных произведений [n]&[m]f(h) аргументов множимого [m]f(2) и аргументов множителя [n]f(2) - "дополнительный код" в пирамидальном умножителе f(↓σ) для последующего логического дешифрирования f(cd↓) и формирования результирующей суммы [s]f(2) - "дополнительный код" (варианты русской логики)
Способ преобразования [m]f(+/-)→uf([m]) минимизированной структуры позиционно-знаковых аргументов [m]f(+/-) троичной системы счисления f(+1,0,-1) в аргумент аналогового напряжения uf([m]) (вариант русской логики)
Способ преобразования структуры аргументов аналоговых логических напряжений «-/+»[m]f(+/-) - "дополнительный код" в позиционно-знаковую структуру минимизированных аргументов логических напряжений [m]f(+/-) и функциональная структура для его реализации (варианты русской логики)
Способ преобразования «-/+»[m]f(+/-) → [m]f(+/-) структуры аргументов аналоговых логических сигналов «-/+»[m]f(+/-) - "дополнительный код" в условно минимизированную позиционно-знаковую структуру аргументов [m]f(+/-) троичной системы счисления f(+1,0,-1) и функциональная структура для его реализации (варианты русской логики)
Способ формирования в "k" "зоне минимизации" результирующего аргумента m сквозной активизации f( 00) → m для преобразования в соответствии с арифметическими аксиомами троичной системы счисления f(+1,0,-1) структуры аргументов аналоговых сигналов «-/+»[m]f(+/-), "дополнительный код" в структуру условно минимизированных позиционно-знаковых аргументов аналоговых сигналов [m]f(+/-) и функциональная структура для его реализации (варианты русской логики)
Способ сквозной активизации f( 11)min → m неактивных аргументов "±0" → "+1/-1" аналоговых сигналов в "зонах минимизации" структуры "-/+" [m]f(+/-) - "дополнительный код" в соответствии с арифметической аксиомой троичной системы счисления f(+1,0,-1) при формировании аргументов аналоговых сигналов в позиционно-знаковой условно минимизированной ее структуре [m]f(+/-) (варианты русской логики)
Способ формирования подъемной силы для подъема и перемещения груза в воздушной среде (вариант русской логики - версия 2)
Функциональная первая входная структура условно "j" разряда сумматора f(σ) с максимально минимизированным технологическим циклом ∆t для аргументов слагаемых [n]f(2) и [m]f(2) формата "дополнительный код ru" с формированием промежуточной суммы (s) "уровня 2" и (s) "уровня 1" первого слагаемого в том же формате (варианты русской логики)
Функциональная вторая входная структура условно разряда "j" сумматора f(σ) с максимально минимизированным технологическим циклом ∆t для аргументов слагаемых [n]f(2) и [m]f(2) формата "дополнительный код ru" с формированием промежуточной суммы [s] второго слагаемого в том же формате (варианты русской логики)
Функциональная структура цифроаналогового преобразования позиционно-знаковых структур аргументов аналоговых сигналов m&[m]f(2) формата "дополнительный код ru" в аналоговый сигнал управления uf([m]) (вариант русской логики)
Способ формирования аргументов аналоговых сигналов частичных произведений [n]&[m]f(h) аргументов множимого [m]f(2) и аргументов множителя [n]f(2) - "дополнительный код" в пирамидальном умножителе f(↓σ) для последующего логического дешифрирования f(cd↓) и формирования результирующей суммы [s]f(2) - "дополнительный код" (варианты русской логики)
Способ преобразования [m]f(+/-)→uf([m]) минимизированной структуры позиционно-знаковых аргументов [m]f(+/-) троичной системы счисления f(+1,0,-1) в аргумент аналогового напряжения uf([m]) (вариант русской логики)
Способ преобразования структуры аргументов аналоговых логических напряжений «-/+»[m]f(+/-) - "дополнительный код" в позиционно-знаковую структуру минимизированных аргументов логических напряжений [m]f(+/-) и функциональная структура для его реализации (варианты русской логики)
Способ преобразования «-/+»[m]f(+/-) → [m]f(+/-) структуры аргументов аналоговых логических сигналов «-/+»[m]f(+/-) - "дополнительный код" в условно минимизированную позиционно-знаковую структуру аргументов [m]f(+/-) троичной системы счисления f(+1,0,-1) и функциональная структура для его реализации (варианты русской логики)
Способ формирования в "k" "зоне минимизации" результирующего аргумента m сквозной активизации f( 00) → m для преобразования в соответствии с арифметическими аксиомами троичной системы счисления f(+1,0,-1) структуры аргументов аналоговых сигналов «-/+»[m]f(+/-), "дополнительный код" в структуру условно минимизированных позиционно-знаковых аргументов аналоговых сигналов [m]f(+/-) и функциональная структура для его реализации (варианты русской логики)
Способ сквозной активизации f( 11)min → m неактивных аргументов "±0" → "+1/-1" аналоговых сигналов в "зонах минимизации" структуры "-/+" [m]f(+/-) - "дополнительный код" в соответствии с арифметической аксиомой троичной системы счисления f(+1,0,-1) при формировании аргументов аналоговых сигналов в позиционно-знаковой условно минимизированной ее структуре [m]f(+/-) (варианты русской логики)
Способ формирования подъемной силы для подъема и перемещения груза в воздушной среде (вариант русской логики - версия 2)

