Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления транспортного средства, которое формирует предупреждение или выполняет управление транспортным средством в отношении помехи.
Уровень техники
[0002] Известна бортовая система считывания помех, которая обнаруживает помехи с использованием датчика на основе электромагнитных волн и ультразвукового датчика (см., например, патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Не прошедшая экспертизу патентная публикация (Япония) № H11-301383
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, поскольку аварийный звуковой сигнал безусловно срабатывает, когда каждый из датчиков обнаруживает помеху, вышеупомянутая бортовая система считывания помех может выполнять предупреждение в отношении помех, которые имеют небольшую вероятность контакта с транспортным средством, и имеет недостаток в том, что вызывает нежелательный стресс у водителя.
[0005] Настоящее изобретение направлено на разрешение проблемы предоставления устройства управления транспортного средства, допускающего уменьшение силы стресса, вызываемого у водителя.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеупомянутую проблему посредством вычисления первого риска, представляющего вероятность того, что первая помеха в близлежащем местоположении войдет в контакт с транспортным средством, и вычисления второго риска, представляющего вероятность того, что вторая помеха в удаленном местоположении войдет в контакт с транспортным средством, и регулирования, по меньшей мере, одного из первого риска и второго риска таким образом, чтобы предпочтительно выполнять предупреждение или управление транспортным средством на основе одного из первого риска или второго риска на основе другого из первого риска или второго риска.
Преимущества изобретения
[0007] Согласно настоящему изобретению, регулирование, по меньшей мере, одного из первого риска и второго риска и предпочтительное выполнение предупреждения или управления транспортным средством в отношении помехи, которая имеет высокую вероятность контакта с транспортным средством на основе состояния парковки транспортного средства, в силу этого позволяет уменьшать стресс, вызываемый у водителя.
Краткое описание чертежей
[0008] Фиг. 1 является схематичным видом транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой устройства управления транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг. 3 является блок-схемой модуля получения информации рассматриваемого транспортного средства на фиг. 2.
Фиг. 4 является схемой для пояснения определения состояния парковки, выполняемого посредством модуля оценки состояния парковки в первом варианте осуществления настоящего изобретения (пример 1).
Фиг. 5 является схемой для пояснения определения состояния парковки, выполняемого посредством модуля оценки состояния парковки в первом варианте осуществления настоящего изобретения (пример 2).
Фиг. 6 является схемой для пояснения определения состояния парковки, выполняемого посредством модуля оценки состояния парковки в первом варианте осуществления настоящего изобретения (пример 3).
Фиг. 7 является схемой для пояснения определения состояния парковки, выполняемого посредством модуля оценки состояния парковки в первом варианте осуществления настоящего изобретения (пример 4).
Фиг. 8 является схемой для пояснения определения состояния парковки, выполняемого посредством модуля оценки состояния парковки в первом варианте осуществления настоящего изобретения (пример 5).
Фиг. 9 является блок-схемой модуля получения информации периферии на фиг. 2.
Фиг. 10 является блок-схемой модуля вычисления информации определения управления на фиг. 2.
Фиг. 11 является графиком для пояснения первого базиса риска в первом варианте осуществления настоящего изобретения.
Фиг. 12 является графиком для пояснения второго базиса риска в первом варианте осуществления настоящего изобретения.
Фиг. 13 иллюстрирует сценарий в первом варианте осуществления настоящего изобретения, в котором выполняется предупреждение или управление транспортным средством.
Фиг. 14 является схемой для пояснения сценария, в котором модуль определения управления приоритетами функционирует в первом варианте осуществления настоящего изобретения (пример 1).
Фиг. 15 является графиком для пояснения протокола определения модуля определения управления приоритетами в первом варианте осуществления настоящего изобретения (пример 1).
Фиг. 16 является схемой для пояснения сценария, в котором модуль определения управления приоритетами функционирует в первом варианте осуществления настоящего изобретения (пример 2).
Фиг. 17 является графиком для пояснения протокола определения модуля определения управления приоритетами в первом варианте осуществления настоящего изобретения (пример 2).
Фиг. 18 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру в устройстве управления транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг. 19 является блок-схемой модуля получения информации рассматриваемого транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 20 является схемой для пояснения работы модуля обнаружения позиции и ориентации во втором варианте осуществления настоящего изобретения (пример 1).
Фиг. 21 является схемой для пояснения работы модуля обнаружения позиции и ориентации во втором варианте осуществления настоящего изобретения (пример 2).
Фиг. 22 является блок-схемой модуля вычисления информации определения управления согласно второму варианту осуществления настоящего изобретения.
Фиг. 23 является графиком для пояснения третьего усиления для регулирования риска во втором варианте осуществления настоящего изобретения.
Фиг. 24 является графиком для пояснения четвертого усиления для регулирования риска во втором варианте осуществления настоящего изобретения.
Фиг. 25 является графиком для пояснения пятого усиления для регулирования риска в третьем варианте осуществления настоящего изобретения.
Фиг. 26 является графиком для пояснения шестого усиления для регулирования риска в третьем варианте осуществления настоящего изобретения.
Фиг. 27 является схемой для пояснения функций второго модуля регулирования риска в четвертом варианте осуществления настоящего изобретения.
Фиг. 28 является схемой для пояснения работы второго модуля регулирования риска в пятом варианте осуществления настоящего изобретения.
Предпочтительные варианты осуществления изобретения
[0009] Варианты осуществления настоящего изобретения поясняются ниже на основе чертежей.
[0010] Первый вариант осуществления
Фиг. 1 является схематичным видом транспортного средства в настоящем варианте осуществления; фиг. 2 является блок-схемой устройства управления транспортного средства в настоящем варианте осуществления; фиг. 3 является блок-схемой модуля получения информации рассматриваемого транспортного средства по фиг. 2; и фиг. 4-8 являются схемами для пояснения определения состояния парковки, выполняемого посредством модуля оценки состояния парковки в настоящем варианте осуществления.
[0011] Как проиллюстрировано на фиг. 1, транспортное средство 1 в настоящем варианте осуществления содержит контроллер 2, датчик 3 переключателя, лампу 4 тормоза, датчик 5 позиции акселератора, датчик 6 позиции педали тормоза, датчик 7 позиции переключения коробки передач, датчик 8 рулевого управления, датчик 9 скорости вращения колес, датчик 10 ускорения и замедления, устройство 11 обнаружения ближних помех, устройство 12 обнаружения удаленных помех, формирователь 13 движущей силы, формирователь 14 тормозной силы, формирователь 15 силы реакции педали акселератора, устройство 16 сигнализации и переключатель 17 зажигания.
Ниже описываются соответствующие датчики, устройства и т.д.
Контроллер 2 описывается в завершение.
[0012] Датчик 3 переключателя обнаруживает состояние рычажного переключателя, который переключает устройство 100 управления транспортного средства (описано ниже) в настоящем варианте осуществления между включенным и выключенным состоянием, и выводит результаты обнаружения в контроллер.
Дополнительно, хотя конкретно не проиллюстрировано, переключатель может предоставляться внутри транспортного средства 1 и включаться и выключаться в соответствии с операцией водителем транспортного средства 1.
[0013] Как проиллюстрировано на фиг. 1, лампа 4 тормоза предоставляется на задней стороне 1a транспортного средства 1 и излучает свет при приведении в действие тормозов, чтобы уведомлять другие транспортные средства, движущиеся позади, в отношении того, что транспортное средство 1 замедляется.
Датчик 5 позиции акселератора обнаруживает позицию акселератора и выводит значение обнаружения в контроллер 2.
[0014] Датчик 7 позиции переключения коробки передач обнаруживает позицию рычага переключения передач и выводит результат обнаружения в контроллер 2.
Датчик 8 рулевого управления получает угол поворота руля при рулении и выводит значение обнаружения в контроллер 2.
Датчик 9 скорости вращения колес обнаруживает число вращений колес на транспортном средстве 1 и выводит значение обнаружения в контроллер 2.
Датчик 10 ускорения и замедления обнаруживает ускорение и замедление транспортного средства 1 и выводит значение обнаружения в контроллер 2.
[0015] Как показано на фиг. 1, устройство 11 обнаружения ближних помех обнаруживает ближнюю помеху 18, которая расположена в пределах ближней области A обнаружения относительно близко по отношению к транспортному средству 1, и выводит значение обнаружения для местоположения и скорости ближней помехи 18 в контроллер 2.
Таким образом, например, звуковой локатор может использоваться для такого типа устройства 11 обнаружения ближних помех.
Кроме того, для ближней области A обнаружения задается рисунок, и она проиллюстрирована на задней стороне 1a транспортного средства 1 на фиг. 1.
В завершение, ближняя область обнаружения не ограничена конкретным образом и может быть, например, областью в пределах расстояния в 1-2 м от транспортного средства 1.
[0016] Как проиллюстрировано на фиг. 1, предусмотрено четыре устройства 11 обнаружения ближних помех настоящего варианта осуществления, размещенные на каждой из передней стороны 1b и задней стороны 1a транспортного средства 1.
Дополнительно, в настоящем варианте осуществления устройства 11 обнаружения ближних помех на задней стороне 1a упоминаются в порядке от центра сверху на схеме в качестве устройства 11 (R2) обнаружения ближних помех, устройства 11 (R1) обнаружения ближних помех, устройства 11 (L1) обнаружения ближних помех и устройства 11 (L2) обнаружения ближних помех.
Кроме того, как проиллюстрировано на том же чертеже, в настоящем варианте осуществления, соответствующие обнаруживаемые области B (часть с варьирующейся фигурой на чертеже) устройств 11 (R1), (L1) обнаружения ближних помех в центре относительно шире соответствующих обнаруживаемых областей B устройств 11 (R2), (L2) обнаружения ближних помех с обоих концов; тем не менее, обнаруживаемые области не ограничены конкретным образом.
В завершение, обнаруживаемые области B являются областями, в которых каждое из устройств 11 (R2), (R1), (L1), (L2) обнаружения ближних помех имеет возможность обнаруживать ближнюю помеху 18.
[0017] Когда помеха появляется в обнаруживаемой области C, устройство 12 обнаружения удаленных помех обнаруживает помеху и выводит обнаружение в контроллер 2.
В настоящем варианте осуществления, как проиллюстрировано на фиг. 1, устройство 12 обнаружения удаленных помех допускает обнаружение удаленной помехи 19 в местоположении, более удаленном, чем вышеупомянутая ближняя область A обнаружения; кроме того, обнаруживаемая область C простирается дальше обнаруживаемой области Be устройства 11 обнаружения ближних помех.
В настоящем варианте осуществления, устройства 12 обнаружения удаленных помех размещаются на каждой из задней стороны 1a и передней стороны 1b транспортного средства 1; два устройства 12 обнаружения удаленных помех размещаются на каждой из задней стороны 1a и передней стороны 1b транспортного средства 1 в настоящем варианте осуществления и обнаруживают удаленную помеху 19, расположенную в направлении, практически идентичном с направлением, в котором устройство 11 обнаружения ближних помех обнаруживает ближнюю помеху 18.
Таким образом, например, радар может использоваться для такого типа устройства 12 обнаружения удаленных помех.
[0018] Формирователь 13 движущей силы является, например, устройством, которое формирует движущую силу для транспортного средства 1, таким как двигатель или мотор.
Формирователь 14 тормозной силы является устройством, которое формирует тормозное давление и управляется посредством контроллера 2.
Формирователь 15 силы реакции педали акселератора является устройством, которое формирует силу реакции относительно нажатия акселератора и управляется посредством контроллера 2.
[0019] Устройство 16 сигнализации является устройством, которое предупреждает водителя в отношении присутствия помехи 18, 19, на основе команды из контроллера 2.
Это устройство 16 сигнализации может быть сконфигурировано посредством зуммера, допускающего формирование предупреждающего звука, к примеру, "бип, бип, бип", или индикатора, допускающего выдачу мигающего светового сигнала, или монитора для навигационной системы, допускающей наличие монитора и указателя, периодически подсвечивающего внешнюю границу изображения и т.д.
[0020] Переключатель 17 зажигания выводит сигнал запуска или остановки для транспортного средства 1 в контроллер 2 на основе операции включения или выключения рычажного переключателя водителем.
[0021] Далее описывается контроллер 2 в настоящем варианте осуществления.
[0022] Контроллер 2 может быть сконфигурирован посредством компьютера, к примеру, электронного модуля управления (ECU), имеющего функции, допускающие выполнение управления помощью при вождении для транспортного средства 1; как проиллюстрировано на фиг. 2, контроллер 2 имеет модуль P1 получения информации рассматриваемого транспортного средства, модуль P2 получения информации периферии, модуль P3 выбора состояния системы, модуль P4 вычисления информации определения управления, модуль P5 определения для активации управления тормозом, модуль P6 управления тормозом, модуль P7 определения силы реакции при приведении в действие педали акселератора, модуль P8 управления силой реакции при приведении в действие педали акселератора, модуль P9 определения сигнализации, модуль P10 управления сигнализацией, модуль P11 определения для управления движущей силой и модуль P12 управления движущей силой.
[0023] Как проиллюстрировано на фиг. 3, модуль P1 получения информации рассматриваемого транспортного средства имеет модуль P101 вычисления скорости и проезжаемого расстояния рассматриваемого транспортного средства, модуль P102 обнаружения позиции акселератора, модуль P103 обнаружения позиции педали тормоза, модуль P104 обнаружения позиции переключения коробки передач, модуль P105 идентификации приведения в действие переключателя, модуль P106 вычисления угла поворота при рулении, модуль P107 вычисления ускорения и замедления, модуль P108 вывода информации рассматриваемого транспортного средства и модуль P109 определения состояния парковки.
[0024] Модуль P101 вычисления скорости и проезжаемого расстояния рассматриваемого транспортного средства получает значение обнаружения для числа вращений колес, выводимое из датчика 9 скорости вращения колес, вычисляет скорость транспортного средства 1, интегрирует вычисленную скорость, а также вычисляет проезжаемое расстояние транспортного средства 1.
Дополнительно, при вычислении скорости транспортного средства модуль P101 вычисления скорости и проезжаемого расстояния рассматриваемого транспортного средства может использовать фильтрацию или усреднение.
[0025] Модуль P102 обнаружения позиции акселератора получает значение обнаружения рабочей позиции акселератора из датчика 5 позиции акселератора и обнаруживает позицию акселератора (величину нажатия акселератора) и выводит этот результат обнаружения в модуль P108 вывода информации рассматриваемого транспортного средства.
Модуль P103 обнаружения позиции педали тормоза получает значение обнаружения рабочей позиции педали тормоза, выводимое из датчика 6 позиции тормоза, и далее обнаруживает то, нажимает или нет водитель тормоз, и выводит эти результаты обнаружения в модуль P108 вывода информации рассматриваемого транспортного средства.
Модуль P104 обнаружения позиции переключения коробки передач получает значение обнаружения позиции рычага переключения передач, выводимое из датчика 7 позиции переключения коробки передач, и выводит это значение обнаружения в модуль P108 вывода информации рассматриваемого транспортного средства.
[0026] Модуль P105 идентификации приведения в действие переключателя обнаруживает результаты обнаружения состояния включения-выключения устройства 100 управления транспортного средства, выводимые из датчика 3 переключателя, и выводит эти результаты обнаружения в модуль P108 вывода информации рассматриваемого транспортного средства.
Дополнительно, модуль P105 идентификации приведения в действие переключателя получает сигнал, выводимый из датчика 17 зажигания, обнаруживает состояния включения-выключения двигателя транспортного средства 1 и выводит результаты обнаружения в модуль P108 вывода информации рассматриваемого транспортного средства.
[0027] Модуль P106 вычисления угла поворота при рулении получает значение обнаружения угла поворота руля при рулении, выводимое из датчика 8 руля, вычисляет угол поворота руля при рулении и выводит эти результаты вычисления в модуль P108 вывода информации рассматриваемого транспортного средства.
Дополнительно, модуль P106 вычисления угла поворота при рулении может использовать фильтрацию при вычислении угла поворота при рулении.
[0028] Модуль P107 вычисления ускорения и замедления получает значение обнаружения ускорения или замедления транспортного средства 1, выводимое из датчика 10 ускорения и замедления, вычисляет ускорение или замедление транспортного средства 1 и выводит результаты вычисления обнаружения в модуль P108 вывода информации рассматриваемого транспортного средства.
[0029] Модуль P108 вывода информации рассматриваемого транспортного средства собирает результаты обнаружения (результаты вычисления) из вышеописанных модуля P101 вычисления скорости и проезжаемого расстояния рассматриваемого транспортного средства, модуля P102 обнаружения позиции акселератора, модуля P103 обнаружения позиции педали тормоза, модуля P104 обнаружения позиции переключения коробки передач, модуля P105 идентификации приведения в действие переключателя, модуля P106 вычисления угла поворота при рулении и модуля P107 вычисления ускорения и замедления и выводит результаты в модуль P3 выбора состояния системы и модуль P4 вычисления информации определения управления.
[0030] Модуль P109 определения состояния парковки получает различные значения обнаружения из модуля P101 вычисления скорости и проезжаемого расстояния рассматриваемого транспортного средства, модуля P104 обнаружения позиции переключения коробки передач и нижеописанного модуля P203 определения присутствия ближних помех в модуле P2 получения периферийной информации и т.д. и определяет то, что "транспортное средство 1 находится в состоянии въезда на запланированное место для парковки" (в дальнейшем в этом документе, называемое "состоянием въезда") или "транспортное средство 1 находится в состоянии выезда с места для парковки" (в дальнейшем в этом документе, называемое "состоянием выезда"), и выводит результаты определения в модуль P4 вычисления информации определения управления.
В настоящем варианте осуществления, состояние въезда и состояние выезда совместно называются "состоянием парковки".
[0031] Протокол определения в модуле P109 определения состояния парковки для определения состояния парковки транспортного средства 1 подробнее поясняется ниже.
[0032] Во-первых, описывается протокол определения на автомобильной парковке при въезде на запланированное место для парковки и при выезде с места для парковки.
[0033] В настоящем варианте осуществления, как проиллюстрировано на фиг. 4, после того, как транспортное средство 1 проезжает вперед не менее чем на предварительно определенное расстояние (например, 10 м), задний ход транспортного средства 1 определяется в качестве состояния въезда.
Дополнительно, фиг. 4 иллюстрируют случай, в котором транспортное средство 1 движется задним ходом на место D для парковки с тем, чтобы парковаться.
[0034] Дополнительно, модуль P109 определения состояния парковки определяет то, что транспортное средство 1 находится в состоянии выезда с места для парковки, при условии, что транспортное средство 1 находится в режиме заднего хода после любого из следующих состояний (1)-(3).
Другими словами, состояние (1) является состоянием, в котором транспортное средство остановлено в течение предварительно определенного времени (например, состояние, в котором позиция переключения коробки передач находится в режиме парковки не меньше 10 секунд); состояние (2) является состоянием, в котором скорость транспортного средства не превышает предварительно определенное значение (например, 1 км/ч), и ближних помех 18 не обнаружено; и состояние (3) является состоянием, в котором устройства 11 (L1), (R1) обнаружения ближних помех, расположенные в центре на задней стороне 1a, обнаруживают ближнюю помеху 18 около направления движения транспортного средства 1 (направления движения задним ходом в примере), и расстояние до ближней помехи 18 от транспортного средства 1 не превышает предварительно определенное значение (например, 0,1 м).
[0035] Далее описывается ситуация параллельной парковки.
[0036] Как проиллюстрировано на фиг. 5, сначала описывается ситуация движения транспортного средства 1 задним ходом в направлении к левой стороне на чертеже с тем, чтобы параллельно парковаться.
[0037] При параллельной парковке таким образом, модуль P109 определения состояния парковки определяет то, что транспортное средство 1 находится в состоянии въезда, когда удовлетворяется одно из следующих состояний (4) или (5).
[0038] Иными словами, как проиллюстрировано на фиг. 5, состояние (4) является состоянием, в котором устройства 11 (L2), (L1), (R1) обнаружения ближних помех обнаруживают ближнюю помеху 18, и расстояния LL2, LL1, LR1 считывания устройств 11 (L2), (L1), (R1) обнаружения ближних помех становятся меньшими в порядке устройств 11 (L2), (L1), (R1) обнаружения ближних объектов (LL2≥LL1≥LR1).
Дополнительно, расстояние LL2 считывания является расстоянием от транспортного средства 1 до ближней помехи 18, вычисленным посредством контроллера 2 на основе значения обнаружения, выводимого посредством устройства 11 (L2) обнаружения ближних помех; расстояние LL1 считывания является расстоянием от транспортного средства 1 до ближней помехи 18, вычисленным посредством контроллера 2 на основе значения обнаружения, выводимого посредством устройства 11 (L1) обнаружения ближних помех; расстояние LR1 считывания является расстоянием от транспортного средства 1 до ближней помехи 18, вычисленным посредством контроллера 2 на основе значения обнаружения, выводимого посредством устройства 11 (R1) обнаружения ближних помех. Дополнительно, расстояние LR2 считывания, описанное ниже, является расстоянием от транспортного средства 1 до ближней помехи 18, вычисленным посредством контроллера 2 на основе значения обнаружения, выводимого посредством устройства 11 (R2) обнаружения ближних помех.
Дополнительно, на том же чертеже расстояния LL2, LL1, LR1, LR2 считывания представляются посредством видимой жирной линии (фиг. 6-8 проиллюстрированы таким же образом).
[0039] Дополнительно, состояние (5) является состоянием, в котором устройства 11 (L2), (L1) обнаружения ближних помех обнаруживают ближнюю помеху 18, и расстояние LL2 считывания превышает расстояние LL1 считывания (LL2≥LL1), и устройство 11 (R1) обнаружения ближних помех не обнаруживает ближнюю помеху 18.
[0040] Кроме того, чем больше разность между расстояниями LL2, LL1, LR1 считывания (разность между максимальным значением и минимальным значением), как определяет модуль P109 определения состояния парковки, тем больше степень, в которой транспортное средство 1 въезжает на запланированное место для парковки.
Дополнительно, чем больше число устройств 11 обнаружения ближних помех, которые обнаруживают ближнюю помеху 18, как определяет модуль P109 определения состояния парковки, тем больше степень, в которой транспортное средство 1 въезжает на запланированное место для парковки.
[0041] Как проиллюстрировано на фиг. 6, далее описывается ситуация движения транспортного средства 1 задним ходом в направлении к правой стороне на чертеже с тем, чтобы параллельно парковаться.
[0042] При параллельной парковке таким образом, модуль P109 определения состояния парковки определяет то, что транспортное средство 1 находится в состоянии въезда, когда удовлетворяется любое из следующих состояний (6) или (7).
[0043] Другими словами, как проиллюстрировано на фиг. 6, состояние (6) является состоянием, в котором устройства 11 (L1), (R1), (R2) обнаружения ближних помех обнаруживают ближнюю помеху 18, и расстояния LL1, LR1, LR2 считывания являются большими в порядке устройств 11 (L1), (R1), (R2) обнаружения ближних помех (LL1≤LR1≤LR2).
[0044] Кроме того, состояние (7) является состоянием, в котором устройства 11 (R1), (R2) обнаружения ближних помех обнаруживают ближнюю помеху 18, и расстояние LR1 считывания меньше расстояния LR2 считывания (LR1≤LR2), и устройство 11 (L1) обнаружения ближних помех не считывает ближнюю помеху 18.
[0045] Кроме того, модуль P109 определения состояния парковки определяет то, что чем больше разность в расстояниях LR2, LR1, LL1 считывания (разность между максимальным значением и минимальным значением), тем больше степень, в которой транспортное средство 1 въезжает на запланированное место для парковки.
Дополнительно, модуль P109 определения состояния парковки определяет то, что чем больше число устройств 11 обнаружения ближних помех, которые обнаруживают расположенный поблизости объект 18, тем больше степень, в которой транспортное средство 1 въезжает на запланированное место для парковки.
[0046] Как проиллюстрировано на фиг. 7, далее описывается ситуация движения транспортного средства 1 задним ходом в направлении к правой стороне чертежа и выезда с места для парковки в режиме параллельной парковки.
В этом случае, модуль P109 определения состояния парковки определяет то, что транспортное средство 1 находится в состоянии выезда, когда удовлетворяется любое из следующих состояний (8)-(10).
[0047] Другими словами, как проиллюстрировано на фиг. 7, состояние (8) является состоянием, в котором устройства 11 (L2), (L1), (R1) обнаружения ближних помех обнаруживают ближнюю помеху 18, и расстояния LL2, LL1, LR1 считывания являются большими в порядке устройств 11 (L2), (L1), (R1) обнаружения ближних помех (LL2≤LL1≤LR1).
Кроме того, фиг. 7 иллюстрирует состояние, в котором устройства (L2), (L1), (R1) обнаружения ближних помех обнаруживают ближнюю помеху 18, тем не менее, устройство 11 (R2) обнаружения ближних помех не обнаруживает ближнюю помеху 18.
[0048] Дополнительно, состояние (9) является состоянием, в котором устройства 11 (L2), (L1) обнаружения ближних помех обнаруживают ближнюю помеху 18, и расстояние LL2 считывания меньше расстояния LL1 считывания (LL2≤LL1).
[0049] Дополнительно, состояние (10) является состоянием, в котором только устройство 11 (L2) обнаружения ближних помех обнаруживает ближнюю помеху 18, и расстояние LL1 считывания не превышает предварительно определенное значение (например, 1 м).
[0050] Модуль P109 определения состояния парковки определяет то, что чем больше разность в расстояниях LL2, LL1, LR1 считывания (разность между максимальным значением и минимальным значением), тем больше степень, в которой транспортное средство 1 выезжает с места для парковки.
Кроме того, модуль P109 определения состояния парковки определяет то, что чем меньше число устройств 11 обнаружения ближних помех, которые обнаруживают ближнюю помеху 18, тем больше степень, в которой транспортное средство 1 выезжает с места для парковки.
[0051] Как проиллюстрировано на фиг. 8, далее описывается ситуация движения задним ходом в направлении к левой стороне на схеме и выезда с места для парковки в режиме параллельной парковки.
В этом случае, модуль P109 определения состояния парковки определяет то, что транспортное средство 1 находится в состоянии выезда, когда удовлетворяется любое из следующих состояний (11)-(13).
[0052] Другими словами, как проиллюстрировано на фиг. 8 состояние (11) является состоянием, в котором устройства 11 (L1), (R1), (R2) обнаружения ближних помех обнаруживают ближнюю помеху 18, и расстояния LL1, LR1, LR2 считывания меньше в порядке устройств 11 (L1), (R1), (R2) обнаружения ближних помех (LL1≥LR1≥LR2).
Кроме того, на том же чертеже иллюстрируется ситуация, когда устройства 11 (L1), (R1), (R2) обнаружения ближних помех обнаруживают ближнюю помеху 18, в то время как устройство 11 (L2) обнаружения ближних помех не обнаруживает ближнюю помеху.
[0053] Состояние (12) является состоянием, в котором устройства 11 (R1), (R2) обнаружения ближних помех обнаруживают ближнюю помеху 18, и расстояние LR1 считывания превышает расстояние LR2 считывания (LR1≥LR2).
[0054] Дополнительно, состояние (13) является состоянием, в котором только устройство 11 (R2) обнаружения ближних помех обнаруживает ближнюю помеху 18, и расстояние LR2 считывания меньше и не превышает предварительно определенное значение (например, 1 м).
[0055] Кроме того, модуль P109 определения состояния парковки определяет то, что чем больше разность в расстояниях LL1, LR1, LR2 считывания (разность между максимальным значением и минимальным значением), тем больше степень, в которой транспортное средство 1 выезжает с места для парковки.
Помимо этого, модуль P109 определения состояния парковки определяет то, что чем меньше число устройств 11 обнаружения ближних помех, которые обнаруживают ближнюю помеху 18, тем больше степень, в которой транспортное средство 1 выезжает с места для парковки.
[0056] Далее описывается модуль P2 получения информации периферии на фиг. 2.
[0057] Фиг. 9 является блок-схемой модуля получения информации периферии на фиг. 2.
[0058] Как проиллюстрировано на фиг. 9, модуль P2 получения информации периферии имеет модуль P202 вычисления относительной скорости ближних объектов, модуль P203 определения присутствия ближних помех, модуль P204 вычисления относительного расстояния удаленных объектов, модуль P205 вычисления относительной скорости удаленных объектов, модуль P206 определения присутствия удаленных помех и модуль P207 вывода информации периферии.
[0059] Модуль P201 вычисления относительного расстояния ближних объектов вычисляет расстояния LL2, LL1, LR1, LR2 считывания от транспортного средства 1 до ближней помехи 18 на основе значения обнаружения, выводимого из устройств 11 (L2), (L1), (R1), (R2) обнаружения ближних помех.
Между тем, модуль P202 вычисления относительной скорости ближних объектов вычисляет относительную скорость ближней помехи 18 относительно транспортного средства 1 на основе значения обнаружения, выводимого из устройства 11 обнаружения ближних помех.
Модуль P201 вычисления относительного расстояния ближних объектов и модуль P202 вычисления относительной скорости ближних объектов могут использовать фильтрацию при вычислении расстояний и относительных скоростей.
[0060] Модуль P203 определения присутствия ближних помех определяет присутствие или отсутствие ближней помехи 18 на основе результатов вычисления из модуля P201 вычисления относительного расстояния ближних объектов и модуля P202 вычисления относительной скорости ближних объектов.
Например, модуль P206 определения присутствия удаленных помех может определять присутствие удаленной помехи 19 в случае, если любое из вычисленных расстояний LL2, LL1, LR1, LR2 считывания находятся в пределах предварительно определенного значения.
[0061] Модуль P204 вычисления относительного расстояния удаленных объектов вычисляет расстояние между транспортным средством 1 и удаленной помехой 19 на основе значения обнаружения, выводимого из устройства 12 обнаружения удаленных помех.
Между тем, модуль P205 вычисления относительной скорости удаленных объектов вычисляет относительную скорость удаленной помехи 19 относительно транспортного средства 1 на основе значения обнаружения, выводимого из устройства 12 обнаружения удаленных помех.
Дополнительно, модуль P204 вычисления относительного расстояния удаленных объектов и модуль P205 вычисления относительной скорости удаленных объектов могут использовать фильтрацию при вычислении расстояний или относительных скоростей.
[0062] Модуль P206 определения присутствия удаленных помех определяет присутствие или отсутствие удаленной помехи 19, на основе результатов вычисления из модуля P204 вычисления относительного расстояния удаленных объектов и модуля P205 вычисления относительной скорости удаленных объектов.
Например, модуль P206 определения присутствия удаленных помех определяет то, что присутствует удаленная помеха 19, когда модуль P204 вычисления относительного расстояния удаленных объектов вычисляет расстояние, которое находится в пределах предварительно определенного значения.
[0063] Модуль P207 вывода информации периферии выводит результаты определения из модуля P203 определения присутствия ближних помех и модуля P206 определения присутствия удаленных помех в модуль P4 вычисления информации определения управления и выводит результаты вычисления из модуля P201 вычисления относительного расстояния ближних объектов и модуля P202 вычисления относительной скорости ближних объектов, а также из модуля P204 вычисления относительного расстояния удаленных объектов и модуля P205 вычисления относительной скорости удаленных объектов в модуль P4 вычисления определения управления.
[0064] Далее описывается модуль P3 выбора состояния системы на фиг. 2.
Модуль P3 выбора состояния системы в завершение выполняет определение включения или выключения устройства 100 управления транспортного средства на основе состояния переключателя, идентифицированного посредством P105 в модуле P1 получения информации рассматриваемого транспортного средства, и выводит результаты определения выполнения в модуль P4 вычисления информации определения управления.
[0065] Далее описывается модуль P4 вычисления информации определения управления.
[0066] Фиг. 10 является блок-схемой модуля вычисления информации определения управления на фиг. 2; фиг. 11 является графиком для пояснения первого базиса риска в настоящем варианте осуществления; фиг. 12 является графиком для пояснения второго базиса риска в настоящем варианте осуществления; фиг. 13 иллюстрирует сценарий в настоящем варианте осуществления, в котором выполняется предупреждение или управление транспортным средством; фиг. 14 и фиг. 16 являются схемами для пояснения сценариев, в которых модуль определения управления приоритетами функционирует в настоящем варианте осуществления; и фиг. 15 и фиг. 17 являются графиками для пояснения протокола определения модуля определения управления приоритетами в настоящем варианте осуществления.
[0067] Как проиллюстрировано на фиг. 10, модуль P4 вычисления информации определения управления имеет модуль P401 вычисления первого риска, модуль P402 вычисления второго риска, первый модуль P403 регулирования риска и модуль P404 определения управления приоритетами. Дополнительно, в настоящем варианте осуществления, модуль P3 выбора состояния системы в завершение определяет включение устройства 100 управления транспортного средства (инструктирует устройству работать), и когда датчик 7 позиции переключения коробки передач обнаруживает то, что позиция операции переключения передач представляет собой задний ход (R), модуль P4 вычисления информации определения управления выполняет управляющие вычисления. Кроме того, такие условия, как падение скорости транспортного средства ниже предварительно определенного порогового значения или падение угла поворота при рулении ниже предварительно определенного порогового значения, могут добавляться в качестве условий для модуля P4 вычисления информации определения управления, чтобы выполнять управляющие вычисления.
[0068] Модуль P401 вычисления первого риска вычисляет первый риск, когда модуль P2 получения информации периферии определяет то, что присутствует ближняя помеха 18.
[0069] Более конкретно, модуль P401 вычисления первого риска вычисляет первый базис RS1 риска, указывающий вероятность того, что транспортное средство 1 войдет в контакт с ближней помехой 18, вычисляет первый базис RS1_K1 риска посредством умножения первого базиса RS1 риска на коэффициент K1, используемый для определения управления приведением в действие торможения посредством модуля P5 определения операции управления тормозом, и вычисляет первый риск RS1_K2 посредством умножения первого базиса RS1 риска на коэффициент K2, используемый для определения управления силой реакции педали акселератора посредством модуля P7 определения управления силой реакции педали акселератора.
Дополнительно, модуль P401 вычисления первого риска вычисляет первый риск RS1_K3 посредством умножения первого базиса RS1 риска на коэффициент K3, используемый для определения сигнализации посредством модуля P9 определения сигнализации, и вычисляет первый риск RS1_K4 посредством умножения первого базиса RS1 риска на коэффициент K4, используемый для определения управления движущей силой посредством модуля P11 определения управления движущей силой.
Таким образом, в настоящем варианте осуществления умножение первого базиса RS1 риска на коэффициенты K1-K4 изменяет взвешивание для каждого определения.
[0070] Здесь, как проиллюстрировано на фиг. 11, вышеупомянутый первый базис RS1 риска может быть вычислен посредством модуля P401 вычисления первого риска в качестве значения расстояния, которое становится больше пропорционально скорости транспортного средства 1.
Первый базис RS1 риска может задаваться равным предварительно определенному значению, когда скорость транспортного средства является нулевой.
Здесь, хотя первый базис RS1 риска настоящего варианта осуществления вычисляется в качестве значения расстояния, первый базис RS1 риска не ограничен этим, и первый базис RS1 риска может быть вычислен в качестве значения времени в соответствии со скоростью движения ближней помехи 18.
[0071] Помимо этого, в настоящем варианте осуществления соответствующие коэффициенты K1-K4 задаются равными значениям между 0-1, так что они возрастают в порядке от K1, K2, K4, K3 (K1≤K2≤K4≤K3), и первый риск RS1_K1, RS1_K2, RS1_K4, RS1_K3 также возрастает в этом порядке (RS1_K1≤RS1_K2≤RS1_K4≤RS1_K3).
Таким образом, в настоящем варианте осуществления, транспортное средство 1 должно управляться в порядке предупреждения из устройства 16 сигнализации, замедления посредством формирователя 13 движущей силы (замедления посредством уменьшения степени открытия акселератора), силы реакции, сформированной для педали акселератора посредством устройства 15 формирования силы реакции педали акселератора, и замедления посредством формирователя 14 тормозной силы (замедления посредством увеличения тормозного давления).
Другими словами, в настоящем варианте осуществления, сначала выполняется предупреждение для того, чтобы оповещать водителя в отношении присутствия ближней помехи, далее управление транспортным средством постепенно выполняется от управления транспортным средством с низкой степенью замедления, чтобы за счет этого подавлять вызывание стресса, ассоциированного с внезапным непреднамеренным замедлением, у водителя.
[0072] Модуль P402 вычисления второго риска вычисляет второй риск, когда модуль P2 получения информации периферии определяет то, что присутствует удаленная помеха 19.
[0073] Более конкретно, модуль P402 вычисления второго риска вычисляет второй базис RS2, RS3 риска, который представляет вероятность того, что транспортное средство 1 войдет в контакт с удаленной помехой 19, идентично первому риску, и вычисляет второй риск посредством умножения второго базиса RS2, RS3 риска на коэффициенты K1-K4.
Во-первых, описывается второй базис RS2, RS3 риска в настоящем варианте осуществления.
[0074] Второй базис RS2 риска вычисляется в качестве значения расстояния, которое увеличивается пропорционально скорости транспортного средства 1 идентично первому базису риска, проиллюстрированному на фиг. 11.
Дополнительно, базис RS2 может задаваться равным предварительно определенному значению, когда скорость транспортного средства является нулевой.
[0075] При этом, как проиллюстрировано на фиг. 12, второй базис RS3 риска вычисляется в качестве значения времени так, что значение времени снижается, чем больше скорость движения удаленной помехи 19 (например, 3 секунды).
Кроме того, скорость движения удаленной помехи 19 может быть вычислена посредством вычитания скорости транспортного средства 1 из относительной скорости транспортного средства 1 относительно удаленной помехи 19.
[0076] Модуль P402 вычисления второго риска в настоящем варианте осуществления вычисляет второй риск RS2_K1, RS 3_K1 посредством умножения второго базиса RS2, RS3 риска, вычисленного вышеупомянутым способом, на коэффициент K1, используемый для определения управления торможением посредством модуля P5 определения управления тормозом, и вычисляет второй риск RS2_K2, RS3_K2 посредством умножения второго базиса RS2, RS3 риска на коэффициент K2, используемый для определения управления силой реакции педали акселератора посредством модуля P7 определения управления силой реакции педали акселератора.
Дополнительно, модуль P402 вычисления второго риска вычисляет второй риск RS2_K3, RS3_K3 посредством умножения второго базиса RS2, RS3 риска на коэффициент K3, используемый для определения сигнализации посредством модуля P9 определения сигнализации, и вычисляет первый риск RS2_K4, RS3_K4 посредством умножения второго базиса RS2, RS3 риска на коэффициент K4, используемый для определения управления движущей силой посредством модуля P11 определения управления движущей силой. Таким образом, в настоящем варианте осуществления, весовые коэффициенты для различных определений изменяются посредством умножения второго базиса RS2, RS3 риска на коэффициенты K1-K4.
[0077] Здесь, в настоящем варианте осуществления соответствующие коэффициенты K1-K4 задаются между 0-1 таким образом, что они увеличиваются в порядке K1, K2, K4, K3 (K1≤K2≤K4≤K3), идентично вышеописанному первому риску.
Второй риск также увеличивается в порядке RS2_K1, RS2_K2, RS2_K4, RS2_K3 (RS2_K1≤RS2_K2≤RS2_K4≤RS2_K3) и в порядке RS3_K1, RS3_K2, RS3_K4, RS3_K3 (RS3_K1≤RS3_K2≤RS3_K4≤RS3_K3).
Следовательно, в настоящем варианте осуществления, транспортное средство 1 постепенно управляется в порядке от предупреждения посредством устройства 16 сигнализации, затем замедления посредством формирователя 13 движущей силы (замедления вследствие уменьшенной позиции акселератора), затем формирования силы реакции на педали акселератора посредством формирователя 15 силы реакции педали акселератора, затем замедления посредством формирователя 14 тормозной силы (замедления вследствие увеличенного тормозного давления).
[0078] Например, как проиллюстрировано на фиг. 13, когда удаленная помеха 19 появляется в первой области C1 обнаружения, предупреждающий звук формируется посредством устройства 16 сигнализации, а после этого, когда удаленная помеха 19 появляется во второй обнаруживаемой области C2, дополнительно выполняется управление движущей силой.
На той же схеме первая область C1 обнаружения расположена в пределах значения расстояния вышеописанного второго риска RS2_K3 в пределах области C обнаружения для устройства 12 обнаружения удаленных помех; и вторая область C2 обнаружения расположена в пределах расстояния вышеописанного второго риска RS2_K4 в области C обнаружения устройства 12 обнаружения удаленных помех.
[0079] Таким образом, в настоящем варианте осуществления, сначала выполняется предупреждение для того, чтобы оповещать водителя в отношении присутствия удаленного объекта, а затем управление транспортным средством постепенно выполняется от управления транспортным средством, имеющего низкую степень замедления за счет этого подавляя вызывание стресса, ассоциированного с внезапным непреднамеренным замедлением, у водителя.
[0080] Первый модуль P403 регулирования риска регулирует первый риск и второй риск, вычисленные вышеупомянутым способом, на основе результатов определения из модуля P109 определения состояния парковки в модуле P1 получения информации рассматриваемого транспортного средства.
Кроме того, регулирование риска в настоящем варианте осуществления описывается с первым риском RS1_K3 и вторым риском RS2_K3 в качестве ссылки.
[0081] Когда модуль P109 определения состояния парковки определяет то, что транспортное средство 1 находится в состоянии въезда, первый модуль P403 регулирования риска регулирует первый риск RS1_K3 таким образом, что он становится больше, а второй риск RS2_K3 таким образом, что он становится меньше, так что предупреждение для того, чтобы уведомлять водителя в отношении присутствия ближней помехи 18, предпочтительно выполняется в сопоставлении с предупреждением для того, чтобы уведомлять водителя в отношении присутствия удаленной помехи 19.
Дополнительно, этот тип регулирования риска может быть выполнен посредством умножения первого и второго рисков RS1_K3, RS2_K3 на это усиление для регулирования риска.
[0082] В нижеприведенном описании первое усиление для регулирования риска, умноженное на первый риск RS1_K3, обозначается как G10, и второе усиление для регулирования риска, умноженное на второй риск RS2_K3, обозначается как G20.
Дополнительно, первый риск RS1_K3_G10 представляет первый риск после первого регулирования риска, и второй риск RS2_K3_G20 представляет второй риск после первого регулирования риска.
[0083] В настоящем варианте осуществления, когда определяется то, что транспортное средство 1 находится в состоянии въезда, первый модуль P403 регулирования риска задает первое усиление G10 для регулирования риска равным относительно большому значению (например, значению, большему или равному 1), и умножает первый риск RS1_K3 на это первое усиление G10 для регулирования риска.
Дополнительно, в этом случае первый модуль P403 регулирования риска задает второе усиление G20 для регулирования риска равным относительно небольшому значению (например, значению между 0-1) и умножает второй риск RS2_K3 на это второе усиление G20 для регулирования риска.
[0084] Дополнительно, устройство может иметь такую конфигурацию, в которой первый риск RS1_K3 может регулироваться до большего значения, а второй риск RS2_K3 может регулироваться до меньшего значения, чем больше степень, в которой транспортное средство 1 пытается парковаться в запланированном месте для парковки.
В силу этого, определение в отношении того, выполнять либо нет предупреждение или управление транспортным средством, может быть более надлежащим образом выполнено в соответствии с состоянием парковки транспортного средства 1.
[0085] Здесь, в настоящем варианте осуществления, первый модуль P403 регулирования риска регулирует как первый, так и второй риск RS1_K3, RS2_K3, без конкретного ограничения этим, может регулироваться только один риск.
Например, регулирование может осуществляться таким образом, что регулируется только второй риск RS2_K3 без регулирования первого риска RS1_K3.
В противном случае, первый риск RS1_K3 может регулироваться таким образом, что он становится больше, без регулирования второго риска RS2_K3.
[0086] При этом, когда модуль P109 определения состояния парковки определяет то, что транспортное средство находится в состоянии выезда, первый модуль P404 регулирования риска регулирует первый риск RS1_K3 таким образом, что он становится меньше, и регулирует второй риск RS2_K3 таким образом, что он становится больше, так что предупреждение для оповещения водителя в отношении присутствия удаленной помехи 19 предпочтительно выполняется в сопоставлении с предупреждением для того, чтобы оповещать водителя в отношении присутствия ближней помехи 18.
[0087] Другими словами, в настоящем варианте осуществления, когда определяется то, что транспортное средство 1 находится в состояниях выезда, этот P4X4 задает первое усиление G10 для регулирования риска равным относительно небольшому значению (например, значению между 0-1) и умножает первый риск RS1_K3 на это первое усиление G10 для регулирования риска.
Дополнительно, в этом случае первый модуль P403 регулирования риска задает второе усиление G20 для регулирования риска равным относительно большому значению (например, значению, большему или равному 1) и умножает второй риск RS2_K3 на это второе усиление G20 для регулирования риска.
[0088] Дополнительно, первый риск RS1_K3 регулируется таким образом, что он становится меньше, и второй риск RS2_K3 регулируется таким образом, что он становится больше, чем больше степень, в которой транспортное средство 1 выезжает с места для парковки.
В силу этого, определение в отношении того, выполнять либо нет предупреждение или управление транспортным средством, может быть более надлежащим образом выполнено в соответствии с состояниями парковки транспортного средства 1.
[0089] Кроме того, в настоящем варианте осуществления, хотя первый модуль P403 регулирования риска регулирует как первый, так и второй риск RS1_K3, RS2_K3, без ограничения этим может регулироваться только один из них.
Например, устройство может иметь такую конфигурацию, в которой регулируется только второй риск RS3_K3 без регулирования первого риска RS1_K3.
Альтернативно, первый риск RS1_K3 может регулироваться таким образом, что он становится меньше, без регулирования второго риска RS2_K3.
[0090] Кроме того, хотя описание опущено, регулирование риска относительно первого риска RS1_K1, RS1_K2, RS1_K4 также может быть выполнено идентично вышеописанному, и регулирование риска относительно второго риска RS2_K1, RS2_K2, RS2_K4, RS3_K1, RS3_K2, RS3_K3, RS3_K4 также может быть выполнено идентично вышеописанному.
[0091] Как проиллюстрировано на фиг. 14, когда помеха 18a, отличающаяся от ближней помехи 18, которая обнаруживается посредством устройства 11 обнаружения ближних помех, появляется между ближней помехой 18 и транспортным средством 1, модуль P404 определения управления приоритетами выводит сигнал для выполнения управления транспортным средством, к примеру, выполнения предупреждения, чтобы оповещать водителя в отношении присутствия помехи 18a, или формирования тормозной силы, в модуль P5 определения операции управления тормозом, модуль P7 определения силы реакции при приведении в действие педали акселератора, модуль P9 определения сигнализации и модуль P11 определения управления движущей силой.
[0092] Здесь, в настоящем варианте осуществления, определение появления помехи 18a может быть выполнено следующим образом.
Иными словами, когда транспортное средство 1 приближается к ближней помехе 18, расстояние между транспортным средством 1 и ближней помехой 18, вычисленное посредством контроллера 2 (модуля P201 вычисления относительного расстояния ближних объектов), постепенно становится меньше.
[0093] В этом случае, если помеха 18a появляется между транспортным средством 1 и ближней помехой 18 около стороны транспортного средства 1, как проиллюстрировано на фиг. 15, расстояние считывания внезапно становится короче, поскольку устройство 11 обнаружения ближних помех считывает помеху 18a.
Таким образом, пунктирная линия на чертеже иллюстрируют случай, в котором варьирование расстояния считывания, когда помеха 18a не появляется между транспортным средством 1 и ближней помехой 18.
Дополнительно, даже если транспортное средство 1 не обнаруживает ближнюю помеху 18, расстояние считывания должно внезапно изменяться посредством помехи 18a, внезапно появляющейся со стороны транспортного средства 1.
[0094] В настоящем варианте осуществления, появление помехи 18a обнаруживается на основе такого внезапного изменения расстояния считывания.
Например, если расстояние считывания меньше предварительно определенного значения (например, 1,5 м), и разность между ранее считываемым расстоянием считывания (расстоянием считывания за несколько секунд до этого или расстоянием считывания, которое контроллер 2 вычисляет за один цикл до этого) и текущим расстоянием считывания не меньше предварительно определенного значения (например, 20 см), это определяется в качестве появления помехи 18a.
[0095] Таким образом, когда модуль P404 определения приоритетов определяет то, что появляется помеха 18a, модуль P404 определения приоритетов предоставляет приоритет выполнению предупреждения или управления транспортным средством в отношении помехи 18a, которая появляется, в сопоставлении с выполнением предупреждения или управления транспортным средством на основе первого и второго рисков.
Кроме того, модуль P404 определения приоритетов выводит сигнал, который инструктирует выполнение предупреждения или управления транспортным средством в отношении появившейся помехи 18a даже в случае, если предупреждение или управление транспортным средством не должны выполняться на основе первого и второго рисков.
[0096] Как проиллюстрировано на фиг. 16, даже в случае, когда помеха 18b активно приближается к транспортному средству 1, идентично вышеописанному, когда появляется помеха 18a, модуль P404 определения управления приоритетами выводит сигнал в модуль P5 определения операции управления тормозом, модуль P7 определения силы реакции при приведении в действие педали акселератора, модуль P9 определения сигнализации и модуль P11 определения управления движущей силой, инструктирующий выполнение предупреждения или управления транспортным средством в отношении приближающейся помехи 18b.
[0097] Здесь, в настоящем варианте осуществления, приближение помехи 18b обнаруживается следующим образом.
Иными словами, когда транспортное средство 1 движется в направлении помехи 18, которая остановлена, расстояние считывания сокращается на расстояние, возрастающее в соответствии со скоростью транспортного средства 1.
[0098] С другой стороны, в дополнение к движению транспортного средства 1 к помехе 18b, когда помеха 18b также движется к транспортному средству 1, как проиллюстрировано на фиг. 17, расстояние считывания становится меньше расстояния, возрастающего в соответствии со скоростью транспортного средства.
Пунктирная линия на идентичном чертеже иллюстрирует варьирование расстояния считывания, когда помеха 18b временно гипотетически остановлена.
[0099] Приближение помехи 18b обнаруживается в настоящем варианте осуществления на основе такого варьирования расстояния считывания.
Если подробнее, помеха 18b может быть определена как приближающаяся к транспортному средству 1, когда разность между расстоянием считывания и проезжаемым расстоянием в соответствии со скоростью транспортного средства не меньше предварительно определенной (например, 15 см).
Альтернативно, разность может быть временем, различенным с возможностью вычислять скорость помехи 18b, и помеха 18b определяется как приближающаяся к транспортному средству 1, когда вычисленная скорость не меньше предварительно определенного значения (1,5 км/ч).
[0100] Таким образом, когда модуль P404 определения приоритетов определяет то, что помеха 18b приближается, модуль P404 определения приоритетов может выводить сигнал, который инструктирует выполнение предупреждения или управления транспортным средством в отношении приближающейся помехи 18b в сопоставлении с выполнением предупреждения или управления транспортным средством на основе первого и второго рисков.
Кроме того, даже если предупреждение или управление транспортным средством на основе первого и второго рисков временно не должно выполняться, то модуль P404 определения приоритетов выводит сигнал, который инструктирует выполнение предупреждения или управления транспортным средством в отношении приближающейся помехи 18b.
[0101] Далее, возвращаясь к фиг. 2, описывается модуль P5 определения операции управления тормозом и т.д.
[0102] Модуль P5 определения операции управления тормозом выводит сигнал для выполнения управления тормозом в модуль P6 управления тормозом, когда первый риск RS1_K1_G10 (значение расстояния), вычисленный посредством модуля P401 вычисления первого риска и регулируемый посредством первого модуля P403 регулирования риска, превышает расстояние LL1 считывания (RS1_K1_G10>LL1) в устройстве 11 обнаружения ближних помех, инструктирующий выполнение управления тормозом (здесь, расстояние LL1 считывания используется в качестве ссылки в этом пояснении).
Кроме того, "управление тормозом", упоминаемое здесь, означает управление тормозным давлением.
[0103] Модуль P5 определения операции управления тормозом дополнительно выводит сигнал для выполнения управления тормозом в модуль P6 управления тормозом, когда второй риск RS2_K1_G20 (значение расстояния), вычисленный посредством модуля P402 вычисления второго риска и регулируемый посредством первого модуля P403 регулирования риска, превышает расстояние LF считывания (RS2_K1_G20>LF) в устройстве 12 обнаружения удаленных помех.
[0104] В завершение, модуль P5 определения операции управления тормозом выводит сигнал для выполнения управления тормозом в модуль P6 управления тормозом, когда второй риск RS3_K1_G20 (значение времени), вычисленный посредством модуля P402 вычисления второго риска и регулируемый посредством первого модуля P403 регулирования риска, превышает время до столкновения (TTC) (RS3_K1_G20>TTC).
Дополнительно, TTC может быть вычислено с помощью следующей формулы (1).
[0105]
TTC=расстояние считывания/относительная скорость…(1)
Расстояние считывания в вышеупомянутой формуле (1) является расстоянием считывания в устройстве 12 обнаружения удаленных помех, и относительная скорость является относительной скоростью транспортного средства 1 относительно удаленной помехи 19.
[0106] Когда вышеупомянутый сигнал получен из модуля P5 определения операции управления тормозом, модуль P6 управления тормозом увеличивает тормозное давление с предварительно определенной скоростью изменения, и когда достигается предварительно определенное тормозное давление, управляет формирователем 14 тормозной силы таким образом, чтобы поддерживать это тормозное давление.
[0107] Когда предварительно определенное тормозное давление поддерживается в течение предварительно определенного времени (например, 0,8 секунды), либо когда предварительно определенное время проходит после того, как транспортное средство 1 останавливается, модуль P6 управления тормозом управляет формирователем 14 тормозной силы таким образом, чтобы уменьшать тормозное давление до нуля с использованием предварительно определенной скорости изменения.
Вышеупомянутое предварительно определенное тормозное давление, предварительно определенное время и предварительно определенная скорость изменения могут изменяться в соответствии со скоростью транспортного средства 1 или расстоянием от транспортного средства 1 до помехи 18, 19.
[0108] Кроме того, когда модуль P5 определения операции управления тормозом определяет то, что требуется управление тормозом на основе как первого риска RS1_K1_G10, так и второго риска RS2_K1_G20, RS3_K1_G20, модуль P6 управления тормозом предпочтительно выполняет управление тормозом на основе первого риска RS1_K1_G10.
[0109] Модуль P7 определения силы реакции при приведении в действие педали акселератора выводит сигнал для выполнения управления силой реакции при приведении в действие педали акселератора в модуль P8 управления силой реакции при приведении в действие педали акселератора, когда первый риск RS1_K2_G10, вычисленный посредством вышеупомянутого P401 и регулируемый посредством первого модуля P403 регулирования риска, превышает расстояние LL1 считывания (RS1_K2_G10>LL1) в устройстве 11 обнаружения ближних помех (расстояние LL1 считывания используется в качестве ссылки в этом пояснении).
[0110] Дополнительно, модуль P7 определения силы реакции при приведении в действие педали акселератора выводит сигнал для выполнения управления силой реакции при приведении в действие педали акселератора в модуль P8 управления силой реакции при приведении в действие педали акселератора, когда второй риск RS2_K2_G20, вычисленный посредством модуля P402 вычисления второго риска и регулируемый посредством первого модуля P403 регулирования риска, превышает расстояние LF считывания (RS2_K2_G20>LF) в устройстве 12 обнаружения удаленных помех.
[0111] Кроме того, модуль P7 определения силы реакции при приведении в действие педали акселератора выводит сигнал для выполнения управления силой реакции при приведении в действие педали акселератора в модуль P8 управления силой реакции при приведении в действие педали акселератора, когда второй риск RS3_K2_G20, вычисленный посредством модуля P402 вычисления второго риска и регулируемый посредством первого модуля P403 регулирования риска, превышает TTC (RS3_K2_G20>TTC).
[0112] Когда вышеупомянутый сигнал получен из модуля P7 определения силы реакции при приведении в действие педали акселератора, и водитель нажимает педаль акселератора, модуль P8 управления силой реакции при приведении в действие педали акселератора управляет формирователем 15 силы реакции педали акселератора таким образом, чтобы увеличивать силу реакции педали акселератора с предварительно определенной скоростью изменения.
[0113] Когда сила реакции педали акселератора достигает значения на основе предварительно определенного значения команды управления силой реакции, модуль P8 управления силой реакции при приведении в действие педали акселератора управляет формирователем 15 силы реакции педали акселератора таким образом, чтобы поддерживать это состояние.
Затем, после того, как проходит предварительно определенное время (например, 0,8 секунды), модуль P8 управления силой реакции при приведении в действие педали акселератора уменьшает значение команды управления силой реакции педали акселератора до нуля с предварительно определенной скоростью изменения.
Дополнительно, значение команды управления силой реакции, предварительно определенное время и предварительно определенная скорость изменения могут быть изменены в соответствии со скоростью транспортного средства 1 или расстоянием от транспортного средства 1 до помехи 18, 19.
[0114] В завершение, когда модуль P7 определения силы реакции при приведении в действие педали акселератора определяет то, что требуется управление силой реакции при приведении в действие педали акселератора на основе как первого риска RS1_K2_G10, так и второго риска RS2_K2_G20, RS3_K2_G20, модуль P8 управления силой реакции при приведении в действие педали акселератора предпочтительно выполняет управление силой реакции при приведении в действие педали акселератора на основе на основе первого риска RS1_K2_G10.
[0115] Модуль P9 определения сигнализации выводит сигнал для устройства 16 сигнализации, чтобы выдавать предупреждение в модуль P10 определения управления сигнализацией, когда первый риск RS1_K3_G10, вычисленный посредством модуля P401 вычисления первого риска и регулируемый посредством первого модуля P403 регулирования риска, превышает расстояние LL1 считывания (RS1_K3_G10>LL1) в устройстве 11 обнаружения ближних помех (расстояние LL1 считывания используется в качестве ссылки в этом пояснении).
[0116] Модуль P9 определения сигнализации дополнительно выводит сигнал для устройства 16 сигнализации, чтобы выдавать предупреждение в модуль P10 определения для управления сигнализацией, когда второй риск RS2_K3_G20 превышает расстояние LF считывания в устройстве 12 обнаружения удаленных помех (RS2_K3_G20>LF).
[0117] Дополнительно, модуль P9 определения сигнализации выводит сигнал для устройства 16 сигнализации, чтобы выдавать предупреждение в модуль P10 определения управления сигнализацией, когда второй риск RS3_K3_G20, вычисленный посредством модуля P402 вычисления второго риска и регулируемый посредством первого модуля P403 регулирования риска, превышает TTC (RS3_K3_G20>TTC).
[0118] Когда получается вышеупомянутый сигнал, модуль P10 определения управления сигнализацией многократно выводит сигнал, который включает или выключает предупреждающий звук или свет.
Если устройство 16 сигнализации является зуммером, модуль P10 определения управления сигнализацией может выводить сигнал для того, чтобы сокращать интервал для включения зуммера в соответствии с приближением друг к другу транспортного средства 1 и помехи 18, 19.
Другими словами, когда помеха 18, 19 находится на большом расстоянии от транспортного средства 1, зуммер может быть выполнен с возможностью излучать прерывистый звук, к примеру, "бип, бип, бип", и выполнен с возможностью излучать непрерывный звук, к примеру, "бииип", когда помеха 18, 19 становится ближе к транспортному средству 1.
В силу этого, водитель может оповещаться в отношении приближения помехи 18, 19 через слуховое восприятие.
Кроме того, различные типы предупреждающих звуков могут быть использованы в качестве предупреждения на предмет ближней помехи 18 и предупреждения на предмет удаленной помехи 19.
[0119] В завершение, когда модуль P9 определения сигнализации определяет то, что требуется предупреждение на основе как первого риска RS1_K3_G10, так и второго риска RS2_K3_G20, модуль P10 управления сигнализацией может предпочтительно выполнять предупреждение на основе первого риска RS1_K3_G10.
[0120] Модуль P11 определения управления движущей силой выводит сигнал для выполнения управления движущей силой в модуль P12 управления движущей силой, когда первый риск RS1_K4_G10, вычисленный посредством модуля P401 вычисления первого риска и регулируемый посредством первого модуля P403 регулирования риска, превышает расстояние LL1 считывания (RS1_K4_G10>LL1) в устройстве 11 обнаружения ближних помех (расстояние LL1 считывания используется в качестве ссылки в этом пояснении).
[0121] Модуль P11 определения управления движущей силой дополнительно выводит сигнал для выполнения управления движущей силой в модуль P12 управления движущей силой, когда второй риск RS2_K4_G20, вычисленный посредством модуля P402 вычисления второго риска и регулируемый посредством первого модуля P403 регулирования риска, превышает расстояние LF считывания (RS2_K4_G20>LF) в устройстве 12 обнаружения удаленных помех.
[0122] Кроме того, модуль P11 определения управления движущей силой выводит сигнал для выполнения управления движущей силой в модуль P12 управления движущей силой, когда второй риск RS3_K4_G20, вычисленный посредством модуля P402 вычисления второго риска и регулируемый посредством первого модуля P403 регулирования риска, превышает TCC (RS3_K4_G20>TCC).
[0123] Когда вышеупомянутый сигнал получается из модуля P11 определения управления движущей силой, модуль P12 управления движущей силой выполняет следующий тип управления для формирователя 13 движущей силы.
Иными словами, модуль P12 управления движущей силой управляет формирователем 13 движущей силы таким образом, чтобы вычислять величину уменьшения для позиции акселератора, уменьшать позицию акселератора до предварительно определенного значения с использованием предварительно определенной скорости изменения, поддерживать это состояние в течение предварительно определенного времени, после этого восстанавливать позицию акселератора в начальное состояние и активировать позицию дроссельной заслонки, представленную посредством следующей формулы (2).
Вышеупомянутая величина уменьшения для степени открытия акселератора, предварительно определенной скорости изменения и предварительно определенного времени может варьироваться в соответствии со скоростью транспортного средства 1 или расстоянием от транспортного средства 1 до помехи 18, 19.
[0124] Конечная позиция дроссельной заслонки=(позиция акселератора вследствие операции водителя)-(вычисленная величина уменьшения для позиции акселератора)… (2)
[0125] В завершение, когда модуль P11 определения управления движущей силой определяет то, что требуется управление движущей силой на основе как первого риска RS1_K4_G10, так и второго риска RS2_K4_G20, модуль P12 управления движущей силой может предпочтительно выполнять управление на основе первого риска RS1_K4_G10.
[0126] Здесь, как проиллюстрировано на фиг. 2, устройство 100 управления транспортного средства в настоящем варианте осуществления сконструировано посредством вышеописанного контроллера 2, устройства 11 обнаружения ближних помех, устройства 12 обнаружения удаленных помех, формирователя 13 движущей силы, формирователя 14 тормозной силы, формирователя 15 силы реакции педали акселератора и устройства 16 сигнализации.
[0127] Далее описываются управляющие процедуры в устройстве 100 управления транспортного средства в настоящем варианте осуществления со ссылкой на фиг. 18.
[0128] Фиг. 18 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру в устройстве 100 управления транспортного средства в настоящем варианте осуществления.
[0129] На блок-схеме последовательности операций способа на фиг. 18, на этапе S1 контроллер 2 (модули P401, P402 вычисления первого и второго риска) вычисляет первый риск RS1_K1, RS1_K2, RS1_K3, RS1_K4 и вычисляет второй риск RS2_K1, RS2_K2, RS2_K3, RS2_K4, RS3_K1, RS3_K2, RS3_K3, RS3_K4.
[0130] Затем, на этапе S3 контроллер 2 (модуль P109 определения состояния парковки) определяет то, находится транспортное средство 1 в состоянии въезда на запланированное место для парковки или в состоянии выезда с места для парковки.
[0131] Затем, на этапе S5 контроллер 2 (первый модуль P403 регулирования риска) выполняет регулирование риска.
Например, на этапе S3, если определено то, что транспортное средство 1 находится в состоянии въезда, первый риск RS1_K3 умножается на относительно большое усиление G10 для регулирования риска, и второй риск RS2_K3 умножается на относительно небольшое усиление G20 для регулирования риска (G10>G20).
Здесь, первый и второй риски RS1_K3, RS2_K3 должны быть использованы в качестве ссылки в этом пояснении.
Дополнительно, как описано выше, только один из первого риска или второго риска может подвергаться регулированию риска, в то время как другой из первого риска или второго риска не подвергается регулированию риска.
[0132] Затем, на этапе S7 контроллер 2 (модуль P5 определения операции управления тормозом, модуль P7 определения силы реакции при приведении в действие педали акселератора, модуль P9 определения сигнализации и модуль P11 определения управления движущей силой) определяет то, выполнять либо нет предупреждение или управление транспортным средством.
На этапе S7, если определено то, что предупреждение или управление транспортным средством должно выполняться, управление переходит к этапу S9.
[0133] При этом если определено то, что предупреждение или управление транспортным средством не должно выполняться, управление переходит к этапу S8.
[0134] На этапе S8 выполняются определения в отношении присутствия или отсутствия другой помехи 18a, которая появляется между ближней помехой 18 и транспортным средством 1, либо присутствия или отсутствия помехи 18b, которая приближается к транспортному средству 1.
Если на этапе S8 определено то, что этот тип помехи 18a, 18b присутствует, управление переходит к этапу S9, а если определено то, что этот тип помехи 18a, 18b не существует, управление в устройстве 100 управления транспортного средства завершается.
[0135] На этапе S9 выполняется предупреждение для того, чтобы оповещать водителя в отношении присутствия помехи 18, 19, либо выполняется управление транспортным средством, к примеру, управление тормозной силой.
[0136] Здесь, в настоящем варианте осуществления, коэффициенты K1-K4, используемые посредством модулей P401, P402 вычисления первого и второго риска, больше в порядке K1, K2, K4, K3 (K1≤K2≤K4≤K3), и, следовательно, транспортное средство 1 управляется в порядке предупреждения посредством устройства 16 сигнализации, замедления посредством формирователя 13 движущей силы (замедления вследствие уменьшенной степени открытия акселератора), формирования силы реакции на педали акселератора посредством формирователя 15 силы реакции педали акселератора и замедления посредством формирователя 14 тормозной силы (замедления вследствие увеличенного тормозного давления).
[0137] Дополнительно, в настоящем варианте осуществления, если на этапе S7 определено то, что предупреждение или управление транспортным средством не должно выполняться, управление переходит к этапу S8; тем не менее, без ограничения этим устройство может иметь такую конфигурацию, в которой управление переходит к этапу S8, даже когда определено то, что предупреждение или управление транспортным средством должно выполняться.
[0138] В этом случае, транспортное средство 1 может управляться в порядке предупреждения посредством устройства 16 сигнализации, замедления посредством формирователя 13 движущей силы, формирования силы реакции на педали акселератора посредством формирователя 15 силы реакции педали акселератора и замедления посредством формирователя 14 тормозной силы в соответствии с приближением друг к другу помехи 18, 19 и транспортного средства 1.
[0139] Вышеупомянутым способом настоящий вариант осуществления вычисляет первый (базис) риска, представляющий вероятность того, что транспортное средство войдет в контакт с ближней помехой, и второй (базис) риска, представляющий вероятность того, что транспортное средство войдет в контакт с удаленной помехой; и на основе состояния, в котором транспортное средство въезжает на запланированное место для парковки, или состояния, в котором транспортное средство выезжает из позиции для парковки, настоящий вариант осуществления регулирует первый риск и второй риск таким образом, чтобы предпочтительно выполнять предупреждение или управление транспортным средством на основе одного из первого риска или второго риска относительно предупреждения или управления транспортным средством на основе другого из первого риска или второго риска.
Другими словами, в настоящем варианте осуществления, приоритет для предупреждения или управления транспортным средством является низким для помехи с низкой вероятностью контакта с транспортным средством и приоритет для предупреждения или управления транспортным средством является высоким для помехи с высокой вероятностью контакта с транспортным средством.
[0140] За счет этого, в настоящем варианте осуществления можно надлежащим образом выполнять предупреждение относительно помехи, которая требует внимания водителя, или выполнять надлежащее управление транспортным средством, чтобы избегать контакта с этой помехой при подавлении ненужных предупреждений или управления транспортным средством, чтобы за счет этого уменьшать стресс, вызываемый у водителя.
[0141] Дополнительно, в настоящем варианте осуществления, транспортное средство управляется в порядке предупреждения посредством устройства сигнализации, замедления посредством формирователя движущей силы (замедления посредством уменьшения степени открытия акселератора), формирования силы реакции на педали акселератора посредством формирователя силы реакции педали акселератора и замедления посредством формирователя тормозной силы (замедления посредством увеличения тормозного давления).
[0142] Иными словами, перед выполнением управления транспортным средством безусловно выдается звуковое предупреждение, и в силу этого водитель оповещается относительно вероятности выполнения управления транспортным средством через предупреждение.
За счет этого, можно подавлять вызывание стресса, ассоциированного с внезапным выполнением управления транспортным средством, у водителя.
[0143] Кроме того, в настоящем варианте осуществления, можно обеспечивать то, что водитель намеренно пытается избегать контакта с помехой перед замедлением вследствие увеличенного тормозного давления, посредством управления транспортным средством в порядке замедления посредством формирователя движущей силы (замедления посредством уменьшения степени открытия акселератора), формирования силы реакции на педали акселератора посредством формирователя силы реакции педали акселератора и замедления посредством формирователя тормозной силы (замедления посредством увеличения тормозного давления).
Таким образом, подавляется вызывание стресса, ассоциированного с непреднамеренным и внезапным торможением, у водителя.
[0144] Дополнительно, в настоящем варианте осуществления, определение в отношении того, выполнять либо нет предупреждение или управление транспортным средством, осуществляется на основе риска, указывающего вероятность того, что транспортное средство и помеха войдут в контакт, и, следовательно, даже если имеется ближняя помеха около транспортного средства, в случае если обнаруживается отдаленная быстро приближающаяся удаленная помеха, по-прежнему можно выполнять предупреждение или управление транспортным средством относительно удаленной помехи.
За счет этого, можно предоставлять надлежащее предупреждение или управление транспортным средством, которое указывает водителю распознавать скрытый риск удаленной помехи.
[0145] Кроме того, в настоящем варианте осуществления, когда обнаруживается появление другой помехи, предупреждение или управление транспортным средством может предпочтительно выполняться для появляющейся помехи 18a, и, следовательно, водитель может надежно идентифицировать появляющийся объект.
[0146] В завершение, в настоящем варианте осуществления, устройство 11 обнаружения ближних помех на задней стороне 1a использовано при определении того, находится или нет транспортное средство 1 в состоянии прекращения режима заднего хода; тем не менее, в этот момент, устройство 11 обнаружения ближних помех на передней стороне 1b или устройство 12 обнаружения удаленных помех может быть использовано для того, чтобы обнаруживать помеху, расположенную впереди транспортного средства 1, и предупреждение и т.д. может быть выполнено для обнаруженной помехи.
Таким образом, это может привлекать внимание водителя к помехе, расположенной на стороне, противоположной направлению движения (в настоящем примере, направлению движения задним ходом).
[0147] Второй вариант осуществления
Фиг. 19 является блок-схемой модуля получения информации рассматриваемого транспортного средства в настоящем варианте осуществления; фиг. 20 и фиг. 21 являются схемами для пояснения работы модуля обнаружения позиции и ориентации в настоящем варианте осуществления; фиг. 22 является блок-схемой модуля вычисления информации определения управления в настоящем варианте осуществления; фиг. 23 является графиком для пояснения третьего усиления риска в настоящем варианте осуществления; и фиг. 24 является графиком для пояснения четвертого усиления риска в настоящем варианте осуществления.
[0148] В настоящем варианте осуществления, хотя конфигурация модуля P1 получения информации рассматриваемого транспортного средства и модуля P4 вычисления информации определения управления в контроллере 2 отличается от первого варианта осуществления, все остальные аспекты являются идентичными первому варианту осуществления.
Ниже описываются только части, которые отличаются от первого варианта осуществления, в то время как частям, которые являются идентичными первому варианту осуществления, присваиваются идентичные условные обозначения, при этом пояснения опускаются.
[0149] Как проиллюстрировано на фиг. 19, модуль P1 получения информации рассматриваемого транспортного средства в контроллере 2 в настоящем варианте осуществления имеет модуль P110 обнаружения позиции и ориентации, который обнаруживает позицию и ориентацию транспортного средства 1 относительно ближней помехи 18.
[0150] Как проиллюстрировано на фиг. 20 и фиг. 21, например, модуль P110 обнаружения позиции и ориентации может оценивать ориентацию направления движения транспортного средства 1 относительно ближней помехи 18 с использованием результатов обнаружения для ближней помехи из устройства 11 обнаружения ближних помех.
Более конкретно, как проиллюстрировано на фиг. 20, когда все устройства 11 (L2), (L1), (R1), (R2) обнаружения ближних помех обнаруживают ближнюю помеху 18, модуль P110 обнаружения позиции и ориентации оценивает то, что направление движения транспортного средства 1 ориентировано к ближней помехе 18.
Здесь, понятие направления движения представляет собой не только направление переднего хода, но также включает в себя направление заднего хода.
Кроме того, фиг. 20 и фиг. 21 иллюстрируют ситуацию, когда транспортное средство приближается к ближней помехе 18 при движении задним ходом.
[0151] При этом, как проиллюстрировано на фиг. 21, когда только устройство 11 (L2) обнаружения ближних помех обнаруживает ближнюю помеху 18, а устройства 11 (L1), (R1), (R2) обнаружения ближних помех не обнаруживают ближнюю помеху 18, модуль P110 обнаружения позиции и ориентации оценивает то, что направление движения транспортного средства 1 ориентировано от ближней помехи 18.
[0152] Модуль P110 обнаружения позиции и ориентации выводит результаты оценки для направления движения транспортного средства 1 во второй модуль P405 регулирования риска (описан ниже).
[0153] В настоящем варианте осуществления, хотя, как упомянуто выше, датчик 11 обнаружения помех оценивает ориентацию направления движения транспортного средства 1 относительно ближней помехи 18, способ для оценки ориентации направления движения транспортного средства 1 не ограничен конкретным образом. Например, на транспортном средстве может предоставляться камера для того, чтобы снимать изображения периферии транспортного средства 1, и ориентация направления движения транспортного средства 1 относительно ближней помехи 18 может быть вычислена с использованием обработки изображений.
[0154] Дополнительно, как проиллюстрировано на фиг. 22, модуль P4 вычисления информации определения управления в настоящем варианте осуществления имеет P405.
[0155] Второй модуль P405 регулирования риска регулирует первый и второй риски, отрегулированные посредством первого модуля P403 регулирования риска, на основе ориентации направления движения транспортного средства, оцененной посредством модуля P110 обнаружения позиции и ориентации.
[0156] Более конкретно, когда направление движения транспортного средства 1 является направлением к ближней помехе 18, первый риск RS1_K1_G10, RS1_K2_G10, RS1_K3_G10, RS1_K4_G10 (условные обозначения опускаются, и он называется просто "первым риском" ниже) регулируется таким образом, что он становится больше, а второй риск RS2_K1_G20, RS2_K2_G20, RS2_K3_G20, RS2_K4_G20, RS3_K1_G20, RS3_K2_G20, RS3_K3_G20, RS3_K4_G20 (условные обозначения опускаются, и он называется просто "вторым риском" ниже) регулируется таким образом, что он становится меньше.
[0157] При этом когда направление движения транспортного средства является направлением от ближней помехи 18, первый риск регулируется таким образом, что он становится меньше, и второй риск регулируется таким образом, что он становится больше.
[0158] Этот тип регулирования риска выполняется следующим образом.
Иными словами, первый риск умножается на третье усиление G11 риска, и второй риск умножается на четвертое усиление G21 риска.
[0159] Первое усиление G11 риска является значением, соответствующим ориентации направления движения транспортного средства 1.
В частности, как проиллюстрировано на фиг. 23, третье усиление G11 риска, которое является множителем первого риска, вычисляется таким образом, что чем больше направление движения транспортного средства 1 ориентировано в направлении к ближней помехе 18, тем больше третье усиление G11 риска (например, значение не меньше 1 в случае на фиг. 20), и таким образом, что чем больше направление движения транспортного средства 1 ориентировано в направлении от ближней помехи 18, тем меньше третье усиление G11 риска (например, значение между 0-1 в случае на фиг. 21).
[0160] При этом, как проиллюстрировано на фиг. 24, четвертое усиление G12 риска, которое является множителем второго риска, вычисляется таким образом, что чем больше направление движения транспортного средства 1 ориентировано в направлении к ближней помехе 18, тем меньше четвертое усиление риска (например, значение между 0-1 в случае на фиг. 20), и таким образом, что чем больше направление движения транспортного средства 1 ориентировано в направлении от ближней помехи 18, тем больше четвертое усиление риска (например, значение не меньше 1 в случае на фиг. 21).
[0161] Далее приводится простое пояснение последовательности операций в устройстве 100 управления транспортного средства в настоящем варианте осуществления.
[0162] Последовательность операций в устройстве 100 управления транспортного средства в настоящем варианте осуществления включает в себя этап S6 регулирования риска, выполняемый посредством второго модуля P405 регулирования риска, предоставленный между этапом регулирования риска (этапом 5), выполняемым посредством первого модуля P403 регулирования риска в первом варианте осуществления, и этапом определения приоритетов (этапом 7), выполняемым посредством модуля P404 определения управления приоритетами.
Иллюстрация опускается из блок-схемы последовательности операций способа.
[0163] Как описано выше, на этапе S6 первый риск регулируется таким образом, что чем больше направление движения транспортного средства 1 ориентировано в направлении, в котором ориентирована ближняя помеха 18, тем большим регулируется первый риск, и тем меньшим регулируется второй риск; и чем больше направление движения транспортного средства 1 представляет собой направление от ближней помехи 18, тем меньшим регулируется первый риск, и тем большим регулируется второй риск.
[0164] Вышеупомянутым способом, в настоящем варианте осуществления, чем больше направление движения транспортного средства ориентировано в направлении к ближней помехе, тем более вероятно предупреждение или управление транспортным средством должно выполняться на основе первого риска, и чем больше направление движения транспортного средства ориентировано в направлении от ближней помехи, тем более вероятно предупреждение или управление транспортным средством должно выполняться на основе второго риска.
В настоящем варианте осуществления, "тем более вероятно предупреждение или управление транспортным средством должно выполняться", включает в себя форсирование времени для выполнения предупреждения или управления транспортным средством.
[0165] За счет этого, например, если транспортное средство движется к расположенному поблизости объекту при парковке и т.д., можно подавлять необоснованное и ненадлежащее предупреждение или управление транспортным средством, при котором предупреждение или управление транспортным средством выполняется для удаленного объекта, для которого вероятность контакта является небольшой.
Следовательно, можно дополнительно уменьшать силу стресса, вызываемого у водителя.
Кроме того, в настоящем варианте осуществления, "подавлять предупреждение или управление транспортным средством" включает в себя задержку времени для предупреждения или управления транспортным средством.
[0166] Дополнительно, в настоящем варианте осуществления, первый модуль регулирования риска регулирует первый и второй риск таким образом, чтобы уменьшать уровень приоритета для предупреждения или управления транспортным средством относительно помехи, имеющей небольшую вероятность контакта с транспортным средством, при увеличении уровня приоритета предупреждения и управления транспортным средством относительно помехи, имеющей большую вероятность контакта с транспортным средством; следовательно, можно уменьшать силу стресса, вызываемого у водителя.
[0167] Кроме того, в настоящем варианте осуществления, когда обнаруживается появление помехи, предупреждение или управление транспортным средством предпочтительно выполняется относительно появляющегося объекта и в силу этого может заставлять водителя надежно распознавать появившуюся помеху.
[0168] Дополнительно, в настоящем варианте осуществления то, выполнять либо нет предупреждение или управление транспортным средством, определяется на основе риска, указывающего вероятность того, что транспортное средство и помеха войдут в контакт, и в силу этого может обеспечивать выполнение надлежащего предупреждения или управления транспортным средством.
[0169] Дополнительно, в настоящем варианте осуществления, можно подавлять вызывание стресса, ассоциированного с внезапным управлением транспортным средством, у водителя, поскольку транспортное средство управляется в порядке предупреждения посредством устройства сигнализации, замедления посредством формирователя движущей силы (замедления посредством уменьшения позиции акселератора), формирования силы реакции на педали акселератора посредством формирователя силы реакции педали акселератора и замедления посредством формирователя тормозной силы (замедления посредством увеличения тормозного давления).
[0170] В настоящем варианте осуществления, хотя как первый, так и второй риск могут подвергаться регулированию риска на основе направления движения транспортного средства, только один из первого риска и второго риска может подвергаться регулированию риска.
Вышеописанные преимущества можно получать даже при таком способе конфигурирования.
[0171] Третий вариант осуществления
Фиг. 25 является графиком для пояснения пятого усиления риска в настоящем варианте осуществления; и фиг. 26 является графиком для пояснения шестого усиления риска в настоящем варианте осуществления.
[0172] Хотя в настоящем варианте осуществления конфигурация модуля P110 обнаружения позиции и ориентации и второго модуля P405 регулирования риска отличается от второго варианта осуществления, все остальные аспекты являются идентичными второму варианту осуществления. Иными словами, настоящий вариант осуществления является идентичным первому варианту осуществления за исключением контроллера 2, имеющего модуль P110 обнаружения позиции и ориентации и второй модуль P405 регулирования риска.
Ниже описываются только части, которые отличаются от первого и второго вариантов осуществления; частям, которые являются идентичными первому и второму вариантам осуществления, присваиваются идентичные условные обозначения, и их пояснения опускаются.
Дополнительно, отображение условных обозначений касательно первого и второго риска опускается, как и в случае второго варианта осуществления.
[0173] Модуль P110 обнаружения позиции и ориентации в настоящем варианте осуществления обнаруживает расстояние от транспортного средства 1 до ближней помехи 18.
Хотя в настоящем варианте осуществления модуль P110 обнаружения позиции и ориентации предоставляется в модуле P1 получения информации рассматриваемого транспортного средства, аналогично второму варианту осуществления, без ограничения этим модуль P201 вычисления относительного расстояния ближних объектов в модуле P2 получения информации периферии может выполнять функции модуля P110 обнаружения позиции и ориентации.
[0174] Кроме того, второй модуль P405 регулирования риска в настоящем варианте осуществления регулирует риск посредством умножения первого риска на пятое усиление риска и умножения второго риска на шестое усиление риска.
[0175] Как проиллюстрировано на фиг. 25, пятое усиление риска вычисляется таким образом, что оно становится больше пропорционально краткости расстояния, обнаруженного посредством вышеупомянутого P110, и становится меньше пропорционально растянутости упомянутого расстояния.
Например, когда расстояние меньше предварительно определенного расстояния, пятое усиление для регулирования риска может задаваться равным значению не меньше 1, а когда расстояние превышает предварительно определенное расстояние, пятое усиление для регулирования риска может задаваться равным значению между 0-1.
[0176] При этом, как проиллюстрировано на фиг. 26, шестое усиление риска вычисляется таким образом, что оно становится меньше пропорционально краткости расстояния, обнаруженного посредством вышеупомянутого P110, и становится больше пропорционально растянутости расстояния.
Например, когда расстояние меньше предварительно определенного расстояния, шестое усиление риска может задаваться равным значению между 0-1, а когда расстояние превышает предварительно определенное расстояние, шестое усиление риска может задаваться равным значению не меньше 1.
[0177] Далее вкратце описывается последовательность операций в устройстве 100 управления транспортного средства в настоящем варианте осуществления.
[0178] Идентично второму варианту осуществления, последовательность операций в устройстве 100 управления транспортного средства в настоящем варианте осуществления содержит этап S6 регулирования риска, выполняемый посредством второго модуля P405 регулирования риска между этапом регулирования риска (этапом S5), выполняемым посредством первого модуля P403 регулирования риска, и этапом определения приоритетов (этапом S7), выполняемым посредством модуля P404 определения управления приоритетами.
Эта иллюстрация не включается в блок-схему последовательности операций способа.
[0179] Как описано выше, на этапе S6, чем короче расстояние от транспортного средства 1 до ближней помехи 18, тем большим регулируется первый риск, и тем меньшим регулируется второй риск; и чем больше расстояние от транспортного средства 1 до ближней помехи 18, тем меньшим регулируется первый риск, и тем большим регулируется второй риск.
[0180] Вышеупомянутым способом в настоящем варианте осуществления, чем ближе транспортное средство подъезжает к ближней помехе, тем более вероятно предупреждение или управление транспортным средством должно выполняться на основе первого риска, и чем дальше транспортное средство от ближней помехи, тем более вероятно предупреждение или управление транспортным средством должно выполняться на основе второго риска.
В настоящем варианте осуществления, "тем более вероятно предупреждение или управление транспортным средством должно выполняться", включает в себя форсирование времени для выполнения предупреждения или управления транспортным средством.
[0181] За счет этого, например, если транспортное средство движется к расположенному поблизости объекту при парковке и т.д., можно подавлять необоснованное и ненадлежащее предупреждение или управление транспортным средством, при котором предупреждение или управление транспортным средством выполняется для удаленного объекта, для которого вероятность контакта является небольшой.
Следовательно, можно дополнительно уменьшать силу стресса, вызываемого у водителя.
Кроме того, в настоящем варианте осуществления, "подавлять предупреждение или управление транспортным средством" включает в себя задержку времени для предупреждения или управления транспортным средством.
[0182] Дополнительно, в настоящем варианте осуществления, первый модуль регулирования риска регулирует первый и второй риски таким образом, чтобы уменьшать уровень приоритета для предупреждения или управления транспортным средством относительно помехи, имеющей небольшую вероятность контакта с транспортным средством, при увеличении уровня приоритета предупреждения и управления транспортным средством относительно помехи, имеющей большую вероятность контакта с транспортным средством; следовательно, можно уменьшать силу стресса, вызываемого у водителя.
[0183] Кроме того, в настоящем варианте осуществления, когда обнаруживается появление помехи, предупреждение или управление транспортным средством предпочтительно выполняется относительно появляющегося объекта и в силу этого может заставлять водителя надежно распознавать появившуюся помеху.
[0184] Дополнительно, в настоящем варианте осуществления то, выполнять либо нет предупреждение или управление транспортным средством, определяется на основе риска, указывающего вероятность того, что транспортное средство и помеха войдут в контакт, и в силу этого может обеспечивать выполнение надлежащего предупреждения или управления транспортным средством.
[0185] Дополнительно, в настоящем варианте осуществления, транспортное средство управляется в порядке предупреждения посредством устройства сигнализации, замедления посредством формирователя движущей силы (замедления посредством уменьшения степени открытия акселератора), формирования силы реакции на педали акселератора посредством формирователя силы реакции педали акселератора и замедления посредством формирователя тормозной силы (замедления посредством увеличения тормозного давления), и, следовательно, можно подавлять вызывание стресса, ассоциированного с внезапным управлением транспортным средством, у водителя.
[0186] В настоящем варианте осуществления, хотя как первый, так и второй риск подвергнуты регулированию риска на основе расстояния от транспортного средства до ближней помехи, только один из первого риска и второго риска может подвергаться регулированию риска.
Вышеописанные преимущества можно получать даже при таком способе конфигурирования.
[0187] Четвертый вариант осуществления
Фиг. 27 является схемой для пояснения функций второго модуля регулирования риска в настоящем варианте осуществления.
[0188] Хотя в настоящем варианте осуществления конфигурация модуля P110 обнаружения позиции и ориентации и второго модуля P405 регулирования риска отличается от второго варианта осуществления, все остальные аспекты являются идентичными второму варианту осуществления. Иными словами, в настоящем варианте осуществления, настоящий вариант осуществления является идентичным первому варианту осуществления за исключением контроллера 2, имеющего модуль P110 обнаружения позиции и ориентации и второй модуль P405 регулирования риска. Ниже описываются только части, которые отличаются от первого и второго вариантов осуществления; частям, которые являются идентичными первому и второму вариантам осуществления, присваиваются идентичные условные обозначения, и их пояснения опускаются. Дополнительно, отображение условных обозначений касательно первого и второго риска опускается, как и в случае второго варианта осуществления.
[0189] Как проиллюстрировано на фиг. 27, модуль P110 обнаружения позиции и ориентации вычисляет оцененную траекторию E движения для транспортного средства 1 и вычисляет расстояние F между упомянутой оцененной траекторией E движения и ближней помехой 18 (называемое "оцененным расстоянием" ниже) на основе угла поворота руля при рулении, вычисленного посредством модуля P106 вычисления угла поворота при рулении.
Дополнительно, оцененное расстояние F в настоящем варианте осуществления является расстоянием между точкой, ближайшей к ближней помехе 18 в оцененной траектории E движения, и осевой линией CL ближней помехи 18. Фиг. 27 иллюстрирует ситуацию, когда транспортное средство 1 находится в режиме заднего хода.
[0190] Кроме того, второй модуль P405 регулирования риска в настоящем варианте осуществления регулирует риск посредством умножения первого риска на седьмое усиление риска и умножения второго риска на восьмое усиление риска.
[0191] Аналогичный пятому усилению риска, проиллюстрированному на фиг. 25, седьмое усиление риска вычисляется таким образом, что оно становится больше пропорционально краткости оцененного расстояния F, и становится меньше пропорционально растянутости оцененного расстояния F. Например, когда оцененное расстояние F меньше предварительно определенного расстояния, седьмое усиление риска может задаваться равным значению не меньше 1; а когда оцененное расстояние F превышает предварительно определенное расстояние, седьмой риск снова может задаваться равным значению между 0-1.
[0192] При этом аналогично шестому усилению риска, проиллюстрированному на фиг. 26, восьмое усиление риска вычисляется таким образом, что оно становится меньше пропорционально краткости оцененного расстояния F, и становится больше пропорционально растянутости оцененного расстояния F. Например, когда оцененное расстояние F меньше предварительно определенного расстояния, восьмое усиление для регулирования риска задается равным значению между 0-1; а когда оцененное расстояние F превышает предварительно определенное расстояние, восьмое усиление риска может задаваться равным не меньше 1.
[0193] Далее вкратце описывается последовательность операций в устройстве 100 управления транспортного средства в настоящем варианте осуществления.
[0194] Идентично второму варианту осуществления, последовательность операций в устройстве 100 управления транспортного средства в настоящем варианте осуществления содержит этап S6 регулирования риска, выполняемый посредством второго модуля P405 регулирования риска между этапом регулирования риска (этапом S5), выполняемым посредством первого модуля P403 регулирования риска, и этапом определения приоритетов (этапом S7), выполняемым посредством модуля P404 определения управления приоритетами.
Эта иллюстрация не включается в блок-схему последовательности операций способа.
[0195] Как описано выше, на этапе S6, чем короче оцененное расстояние F, тем большим регулируется первый риск, и тем меньшим регулируется второй риск; в то время как чем больше оцененное расстояние F, тем меньшим регулируется первый риск, и тем большим регулируется второй риск.
[0196] Вышеупомянутым способом в настоящем варианте осуществления, чем ближе транспортное средство подъезжает к ближней помехе, тем более вероятно предупреждение или управление транспортным средством должно выполняться на основе первого риска, и чем дальше транспортное средство от ближней помехи, тем более вероятно предупреждение или управление транспортным средством должно выполняться на основе второго риска.
В настоящем варианте осуществления, "тем более вероятно предупреждение или управление транспортным средством должно выполняться", включает в себя форсирование времени для выполнения предупреждения или управления транспортным средством.
[0197] За счет этого, например, если транспортное средство движется к расположенному поблизости объекту при парковке и т.д., можно подавлять необоснованное и ненадлежащее предупреждение или управление транспортным средством, при котором предупреждение или управление транспортным средством выполняется для удаленного объекта, для которого вероятность контакта является небольшой.
Следовательно, можно дополнительно уменьшать силу стресса, вызываемого у водителя.
Кроме того, в настоящем варианте осуществления, "подавлять предупреждение или управление транспортным средством" включает в себя задержку времени для предупреждения или управления транспортным средством.
[0198] Дополнительно, в настоящем варианте осуществления, первый модуль регулирования риска регулирует первый и второй риски таким образом, чтобы уменьшать уровень приоритета для предупреждения или управления транспортным средством относительно помехи, имеющей небольшую вероятность контакта с транспортным средством, при увеличении уровня приоритета предупреждения и управления транспортным средством относительно помехи, имеющей большую вероятность контакта с транспортным средством; следовательно, можно уменьшать силу стресса, вызываемого у водителя.
[0199] Кроме того, в настоящем варианте осуществления, когда обнаруживается появление помехи, предупреждение или управление транспортным средством предпочтительно выполняется относительно появляющегося объекта и в силу этого может заставлять водителя надежно распознавать появившуюся помеху.
[0200] Дополнительно, в настоящем варианте осуществления то, выполнять либо нет предупреждение или управление транспортным средством, определяется на основе риска, указывающего вероятность того, что транспортное средство и помеха войдут в контакт, и в силу этого может обеспечивать выполнение надлежащего предупреждения или управления транспортным средством.
[0201] Дополнительно, в настоящем варианте осуществления, транспортное средство управляется в порядке предупреждения посредством устройства сигнализации, замедления посредством формирователя движущей силы (замедления посредством уменьшения позиции акселератора), формирования силы реакции на педали акселератора посредством формирователя силы реакции педали акселератора и замедления посредством формирователя тормозной силы (замедления посредством увеличения тормозного давления), и, следовательно, можно подавлять вызывание стресса, ассоциированного с внезапным управлением транспортным средством, у водителя.
[0202] В настоящем варианте осуществления, хотя как первый, так и второй риск могут подвергаться регулированию риска на основе расстояния между оцененной траекторией движения и ближней помехой, только один из первого риска и второго риска может подвергаться регулированию риска.
Вышеописанные преимущества можно получать даже при таком способе конфигурирования.
[0203] Пятый вариант осуществления
Фиг. 28 является схемой для пояснения функций второго модуля регулирования риска в настоящем варианте осуществления.
[0204] Хотя в настоящем варианте осуществления конфигурация модуля P110 обнаружения позиции и ориентации и второго модуля P405 регулирования риска отличается от второго варианта осуществления, все остальные аспекты являются идентичными второму варианту осуществления. Иными словами, в настоящем варианте осуществления, настоящий вариант осуществления является идентичным первому варианту осуществления за исключением контроллера 2, имеющего модуль P110 обнаружения позиции и ориентации и второй модуль P405 регулирования риска.
Ниже описываются только части, которые отличаются от первого и второго вариантов осуществления; частям, которые являются идентичными первому и второму вариантам осуществления, присваиваются идентичные условные обозначения, и их пояснения опускаются.
Дополнительно, отображение условных обозначений касательно первого и второго риска опускается, как и в случае второго варианта осуществления.
[0205] Как проиллюстрировано на фиг. 28, модуль P110 обнаружения позиции и ориентации в настоящем варианте осуществления вычисляет величину J смещения расстояния между самым дальним концом H транспортного средства 1 от запланированного места G для парковки и запланированным местом G для парковки. Величина J смещения может быть получена посредством выбора конца H транспортного средства 1 вместе с местоположением G и вычисления расстояния между концом H и запланированным местом G для парковки при выборе запланированного места G для парковки на мониторе, отображающем периферию транспортного средства 1, в функции управления парковкой, которая направляет транспортное средство 1 в запланированное место G для парковки.
Функция управления парковкой может быть функцией в навигационной системе (не показана), которая предоставляется в транспортном средстве 1 в настоящем варианте осуществления.
Дополнительно, фиг. 28 иллюстрирует ситуацию, когда транспортное средство 1 находится в режиме заднего хода.
[0206] Кроме того, второй модуль P405 регулирования риска в настоящем варианте осуществления регулирует риск посредством умножения первого риска на девятое усиление для регулирования риска и умножения второго риска на десятое усиление для регулирования риска.
[0207] Аналогично пятому усилению для регулирования риска на фиг. 25, девятое усиление для регулирования риска вычисляется таким образом, что оно становится больше пропорционально малости величины J смещения и становится меньше пропорционально крупности величины J смещения.
Например, когда смещение J меньше предварительно определенного значения, девятое усиление для регулирования риска может задаваться равным значению, которое не меньше 1, а когда величина J смещения превышает предварительно определенное значение, девятое усиление для регулирования риска может задаваться равным значению между 0-1.
[0208] При этом аналогично шестому усилению риска на фиг. 26, десятое усиление для регулирования риска вычисляется таким образом, что оно становится меньше пропорционально малости величины J смещения и больше пропорционально крупности величины J смещения.
Например, когда величина J смещения меньше предварительно определенного значения, десятое усиление для регулирования риска может задаваться равным значению между 0-1, а когда величина J смещения превышает предварительно определенное значение, десятое усиление для регулирования риска может задаваться равным значению, которое не меньше 1.
[0209] Далее вкратце описывается последовательность операций в устройстве 100 управления транспортного средства в настоящем варианте осуществления.
[0210] Идентично второму варианту осуществления, последовательность операций в устройстве 100 управления транспортного средства в настоящем варианте осуществления содержит этап S6 регулирования риска, выполняемый посредством второго модуля P405 регулирования риска между этапом регулирования риска (этапом S5), выполняемым посредством первого модуля P403 регулирования риска, и этапом определения приоритетов (этапом S7), выполняемым посредством модуля P404 определения управления приоритетами.
Эта иллюстрация не включается в блок-схему последовательности операций способа.
[0211] Как описано выше, на этапе S6, чем меньше величина J смещения, тем большим регулируется первый риск, и тем меньшим регулируется второй риск; и чем больше величина J смещения, тем меньшим регулируется первый риск, и тем большим регулируется второй риск.
[0212] Вышеупомянутым способом в настоящем варианте осуществления, чем ближе транспортное средство подъезжает к ближней помехе, тем более вероятно предупреждение или управление транспортным средством должно выполняться на основе первого риска, и чем дальше транспортное средство от ближней помехи, тем более вероятно предупреждение или управление транспортным средством должно выполняться на основе второго риска.
В настоящем варианте осуществления, "тем более вероятно предупреждение или управление транспортным средством должно выполняться", включает в себя форсирование времени для выполнения предупреждения или управления транспортным средством.
[0213] За счет этого, например, если транспортное средство движется к расположенному поблизости объекту при парковке и т.д., можно подавлять необоснованное и ненадлежащее предупреждение или управление транспортным средством, при котором предупреждение или управление транспортным средством выполняется для удаленного объекта, для которого вероятность контакта является небольшой.
Следовательно, можно дополнительно уменьшать силу стресса, вызываемого у водителя.
Кроме того, в настоящем варианте осуществления, "подавлять предупреждение или управление транспортным средством" включает в себя задержку времени для предупреждения или управления транспортным средством.
[0214] Дополнительно, в настоящем варианте осуществления, первый модуль регулирования риска регулирует первый и второй риск таким образом, чтобы уменьшать уровень приоритета для предупреждения или управления транспортным средством относительно помехи, имеющей небольшую вероятность контакта с транспортным средством, при увеличении уровня приоритета предупреждения и управления транспортным средством относительно помехи, имеющей большую вероятность контакта с транспортным средством; следовательно, можно уменьшать силу стресса, вызываемого у водителя.
[0215] Кроме того, в настоящем варианте осуществления, когда обнаруживается появление помехи, предупреждение или управление транспортным средством предпочтительно выполняется относительно появляющегося объекта и в силу этого может заставлять водителя надежно распознавать появившуюся помеху.
[0216] Дополнительно, в настоящем варианте осуществления то, выполнять либо нет предупреждение или управление транспортным средством, определяется на основе риска, указывающего вероятность того, что транспортное средство и помеха войдут в контакт, и в силу этого может обеспечивать выполнение надлежащего предупреждения или управления транспортным средством.
[0217] Дополнительно, в настоящем варианте осуществления, транспортное средство управляется в порядке предупреждения посредством устройства сигнализации, замедления посредством формирователя движущей силы (замедления посредством уменьшения позиции акселератора), формирования силы реакции на педали акселератора посредством формирователя силы реакции педали акселератора и замедления посредством формирователя тормозной силы (замедления посредством увеличения тормозного давления), и, следовательно, можно подавлять вызывание стресса, ассоциированного с внезапным управлением транспортным средством, у водителя.
[0218] В настоящем варианте осуществления, хотя как первый, так и второй риск подвергнуты регулированию риска на основе величины смещения, только один из первого риска и второго риска может подвергаться регулированию риска.
Вышеописанные преимущества можно получать даже при таком способе конфигурирования.
[0219] Ближняя помеха 18 в вариантах 1-5 осуществления является одним примером первой помехи; удаленная помеха 19 в вариантах 1-5 осуществления является одним примером второй помехи в настоящем изобретении; устройство 11 обнаружения ближних помех и модуль P2 получения информации периферии в вариантах 1-5 осуществления являются одним примером первого средства обнаружения помех в настоящем изобретении; устройство 12 обнаружения удаленных помех и модуль P2 получения информации периферии в вариантах 1-5 осуществления являются одним примером второго средства обнаружения помех в настоящем изобретении; модуль P401 вычисления первого риска и модуль P402 вычисления второго риска в вариантах 1-5 осуществления являются одним примером средства вычисления риска в настоящем изобретении; модуль P5 определения для активации управления тормозом, модуль P7 определения силы реакции при приведении в действие педали акселератора, модуль P9 определения сигнализации и модуль P11 определения управления движущей силой в вариантах 1-5 осуществления являются одним примером средства определения риска в настоящем изобретении; формирователь 13 движущей силы, формирователь 14 тормозной силы, формирователь 15 силы реакции педали акселератора и устройство 16 сигнализации в вариантах 1-5 осуществления являются одним примером средства управления предупреждениями в настоящем изобретении; автомобильная парковка D в первом варианте осуществления и запланированное место G для парковки в пятом варианте осуществления являются одним примером запланированного места для парковки в настоящем изобретении; автомобильная парковка D является одним вариантом осуществления места для парковки в настоящем изобретении; модуль P109 определения состояния парковки в вариантах 1-5 осуществления является одним примером средства определения состояния парковки в настоящем изобретении; первый модуль P403 регулирования риска в вариантах 1-5 осуществления является одним примером первого средства регулирования риска в настоящем изобретении; модуль P110 обнаружения позиции и ориентации в вариантах 2-5 осуществления является одним примером средства обнаружения позиции и ориентации в настоящем изобретении; второй модуль P405 регулирования риска в вариантах 2-5 осуществления является одним примером второго средства регулирования риска в настоящем изобретении.
[0220] В завершение, вышеприведенное описание вариантов осуществления предоставляется просто для упрощения понимания настоящего изобретения и никоим образом не для ограничения настоящего изобретения. Соответственно, различные элементы, раскрытые в вариантах осуществления, могут быть модифицированы или заменены на эквивалентные элементы в той мере, в какой модификации и т.п. остаются в пределах объема изобретения.
Список ссылочных позиций
[0221] 1 - транспортное средство
2 - контроллер
11 - устройство обнаружения ближних помех
12 - устройство обнаружения удаленных помех
13 - формирователь движущей силы
14 - формирователь тормозной силы
15 - формирователь силы реакции педали акселератора
16 - устройство сигнализации
100 - устройство управления транспортного средства
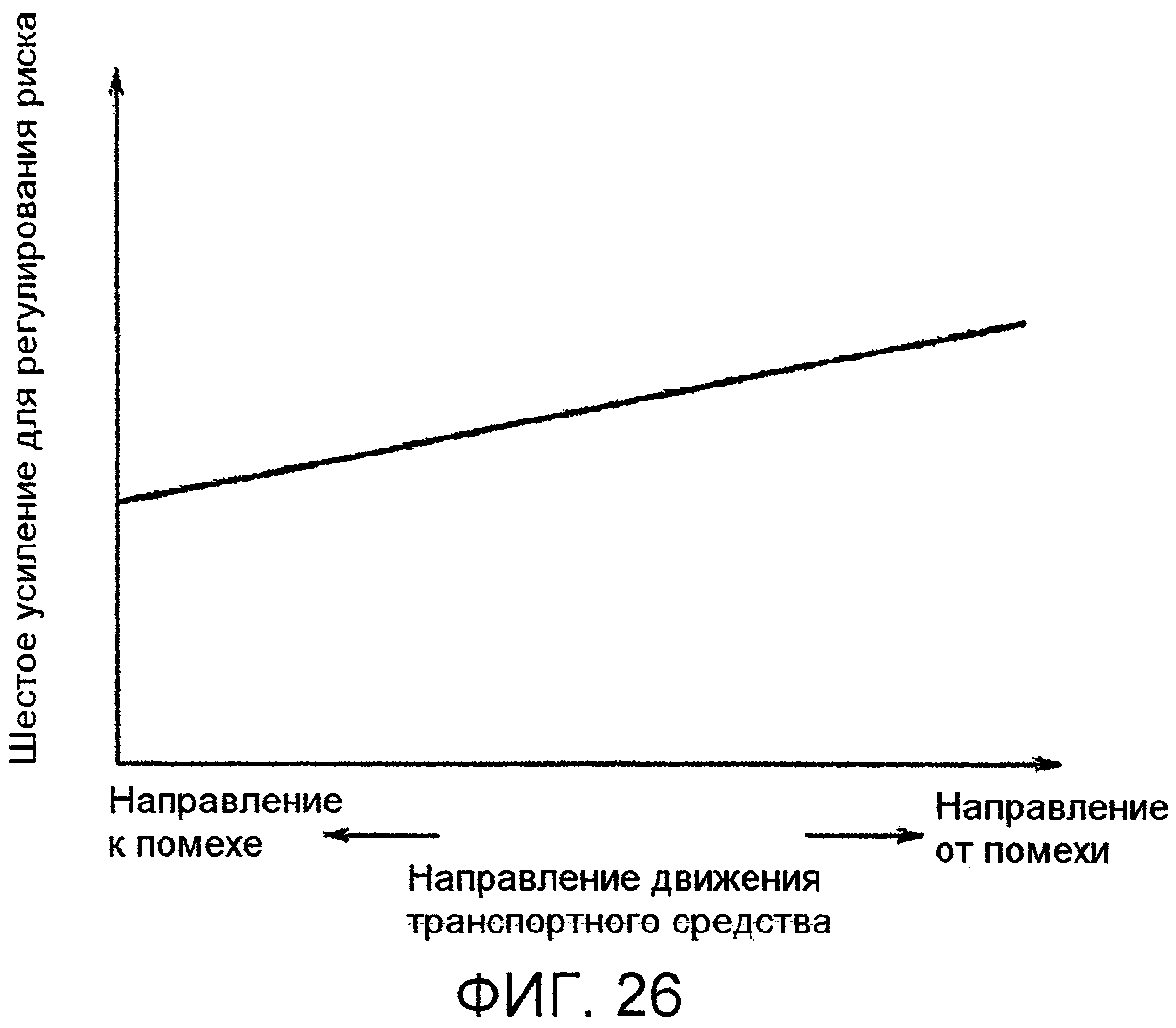
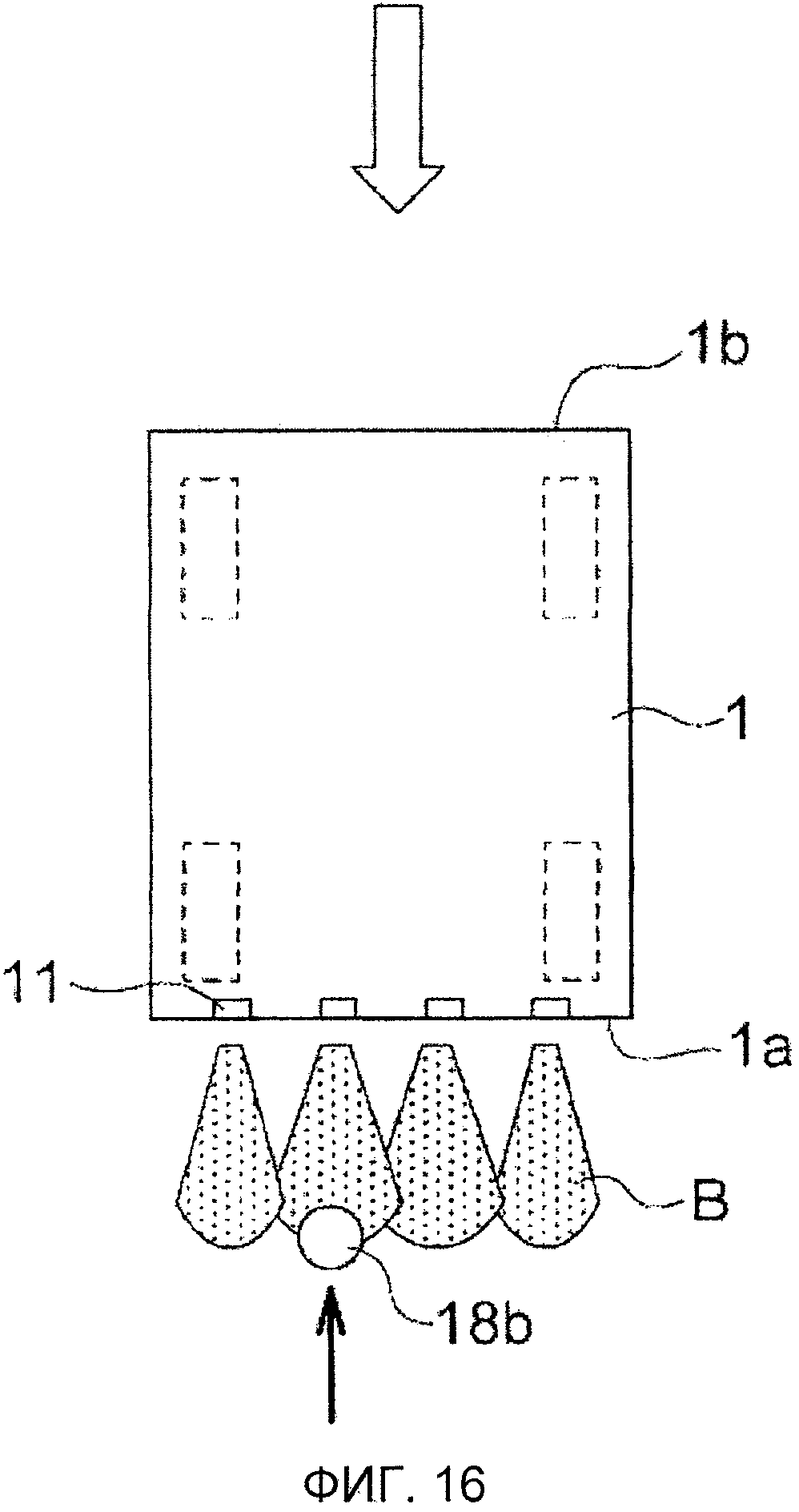
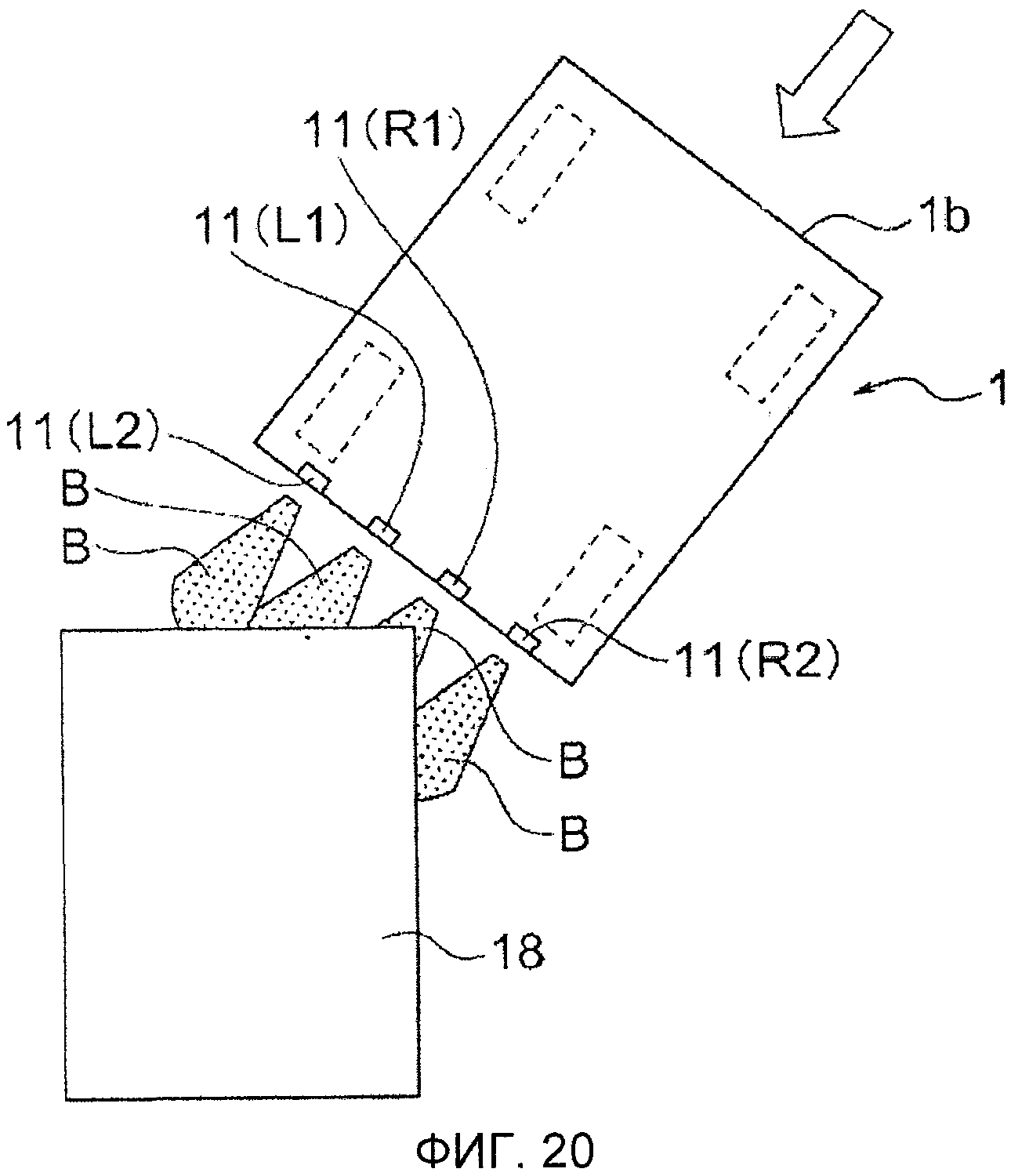
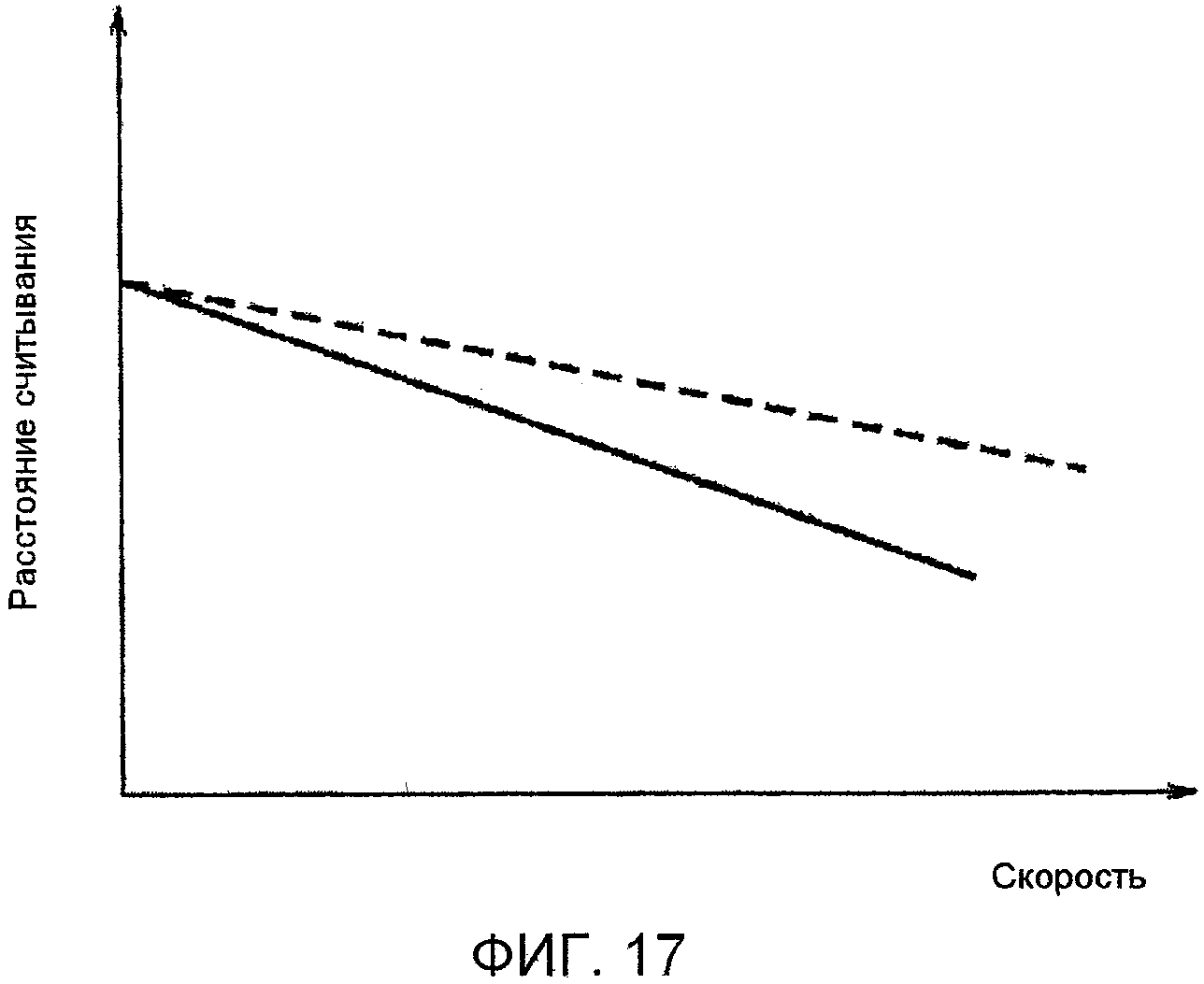
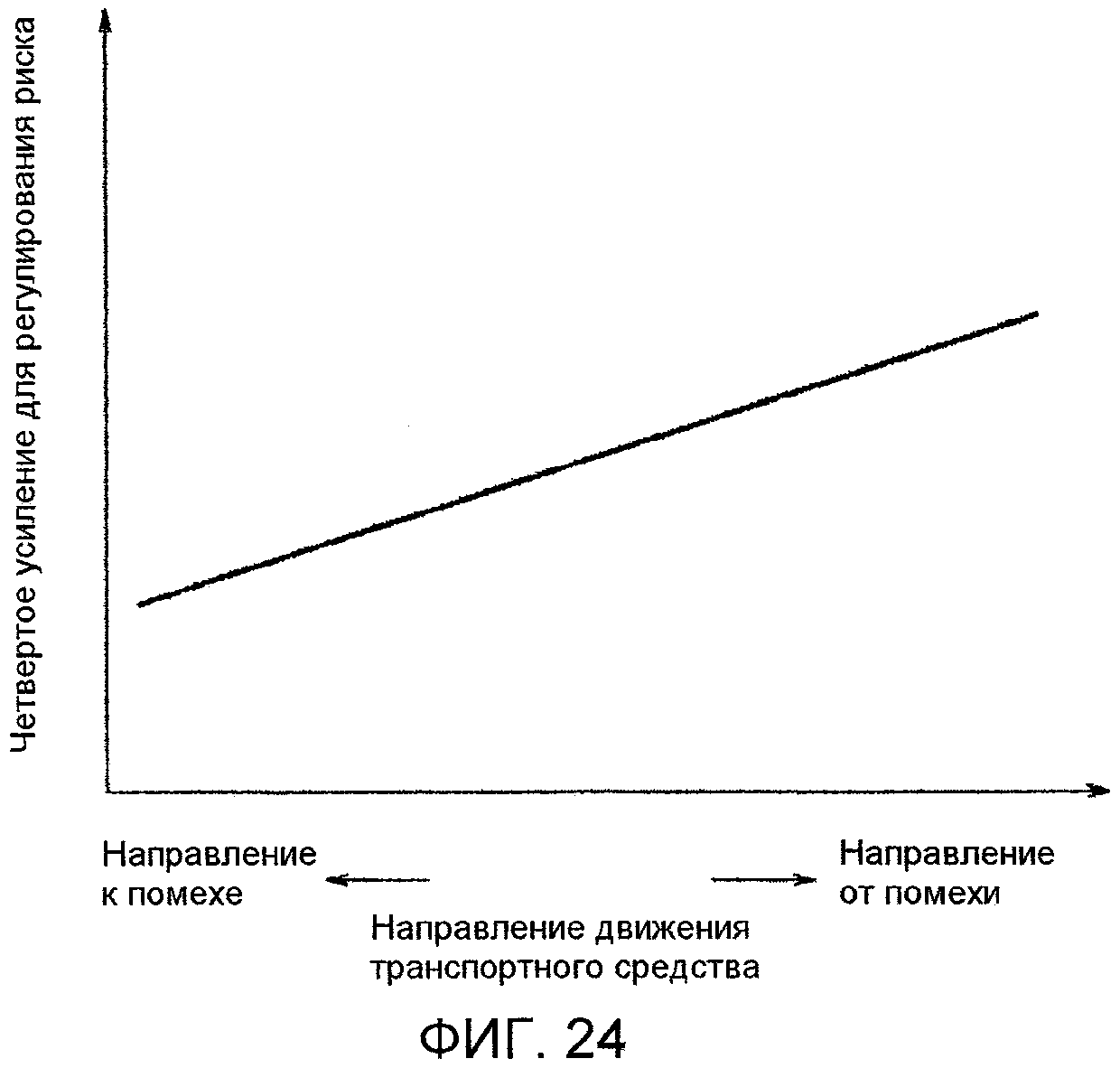
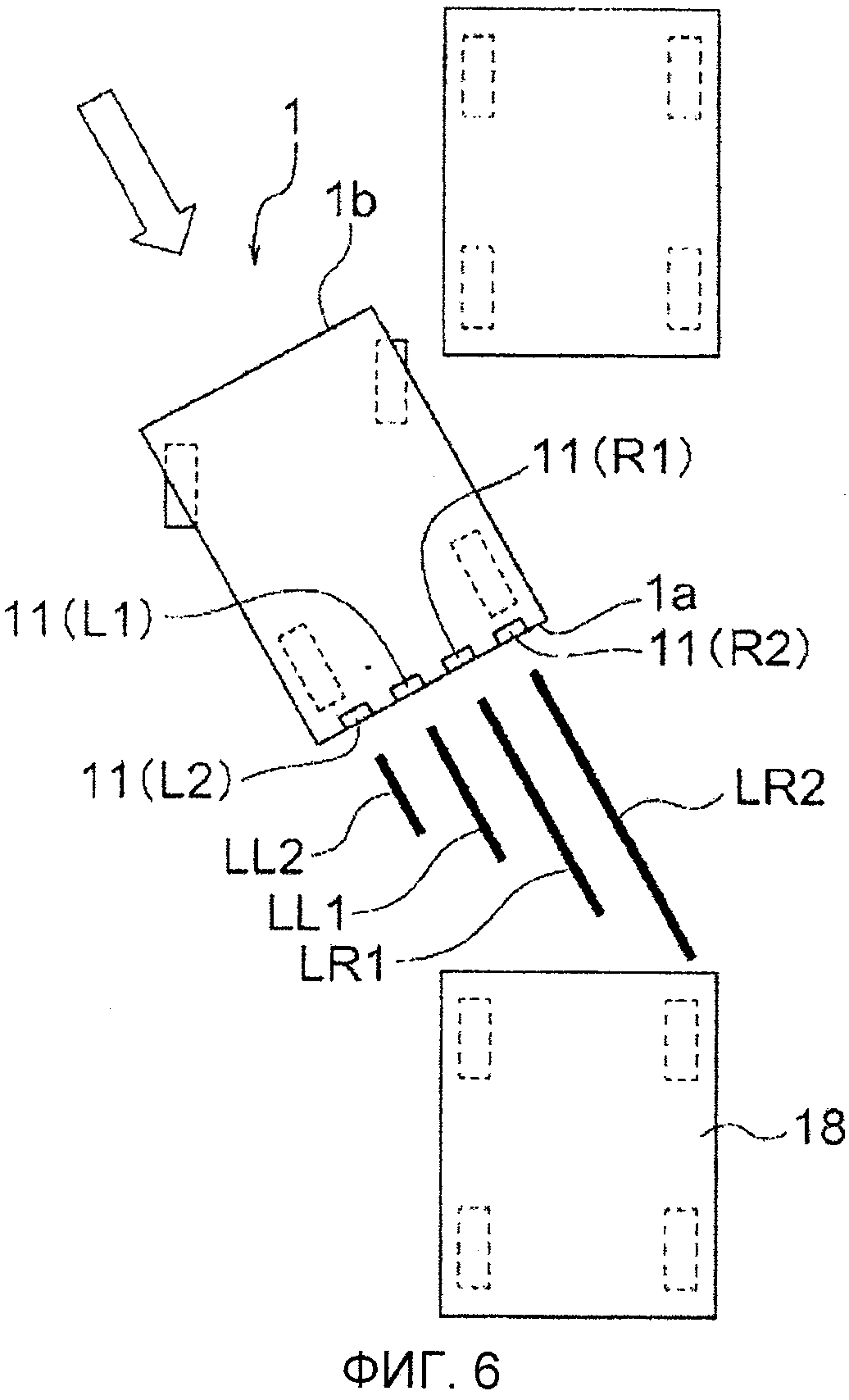
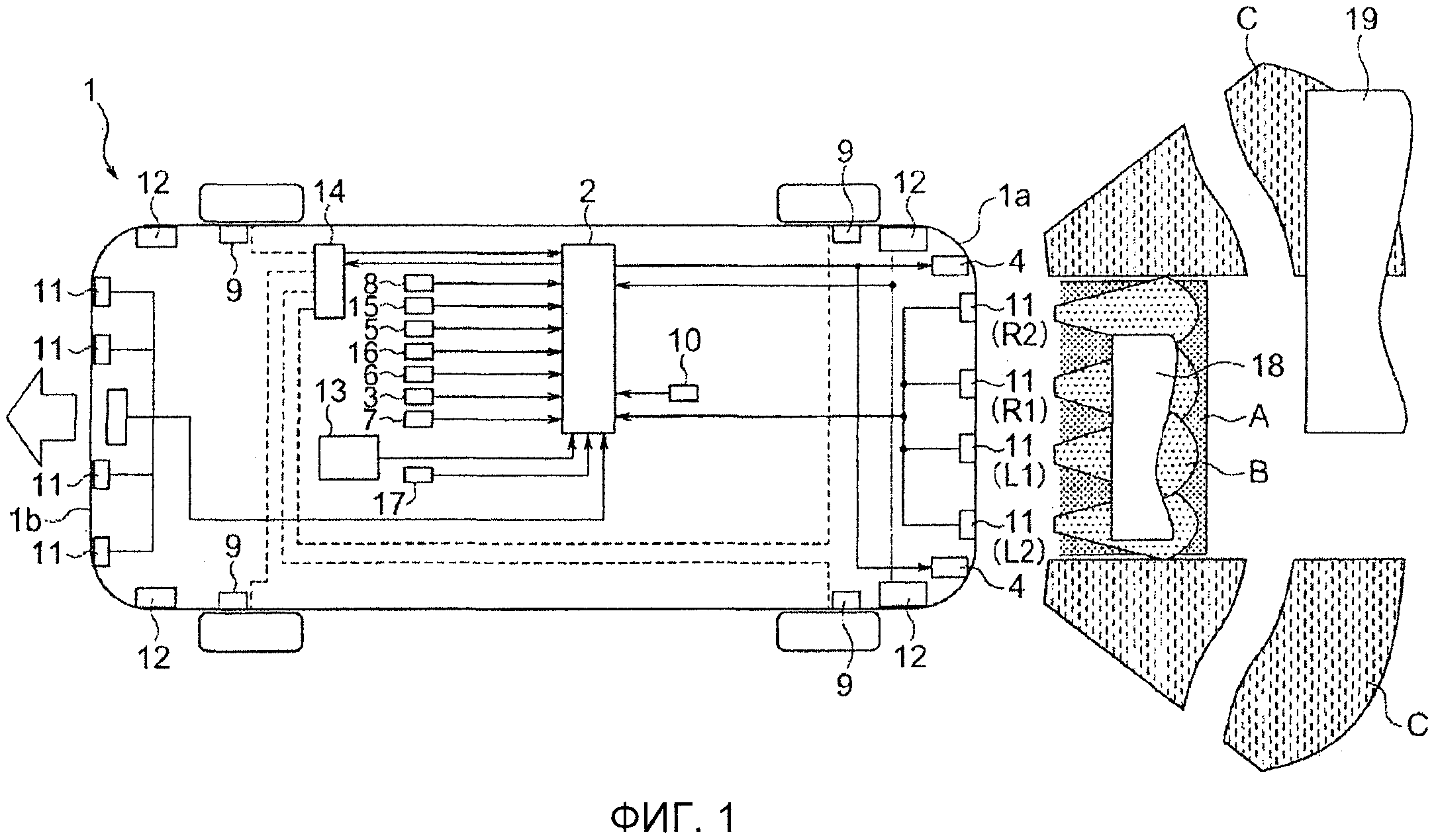
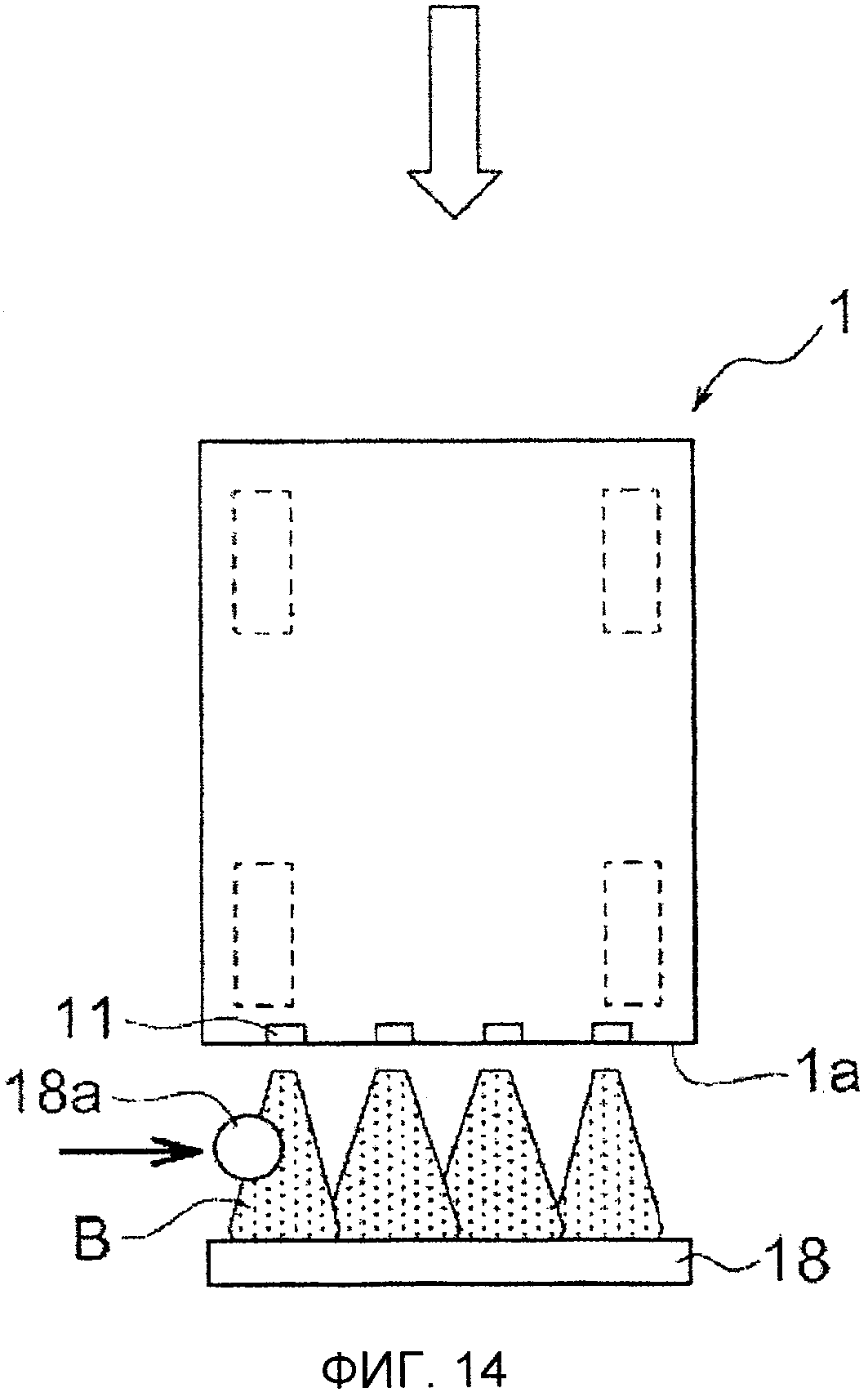
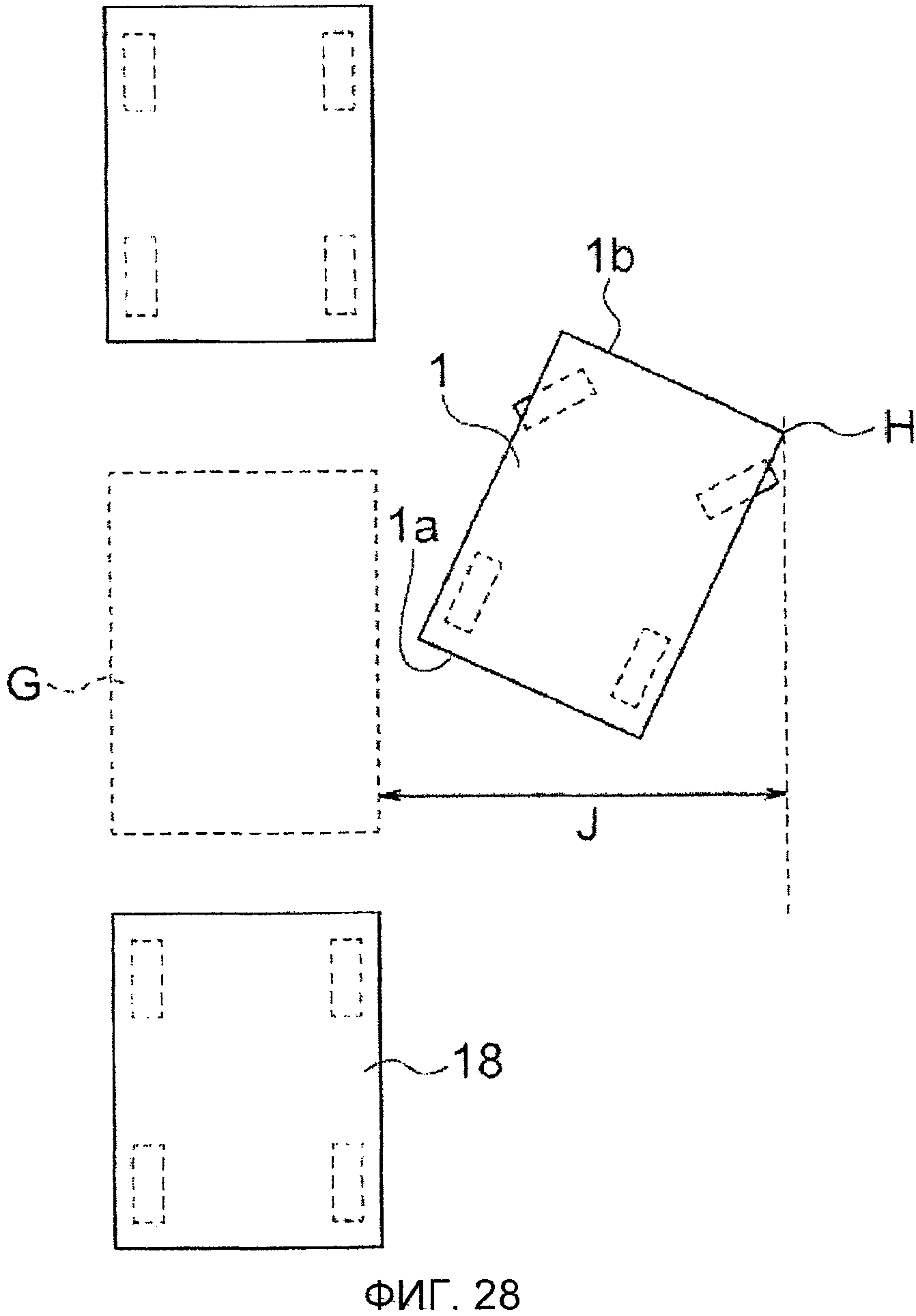
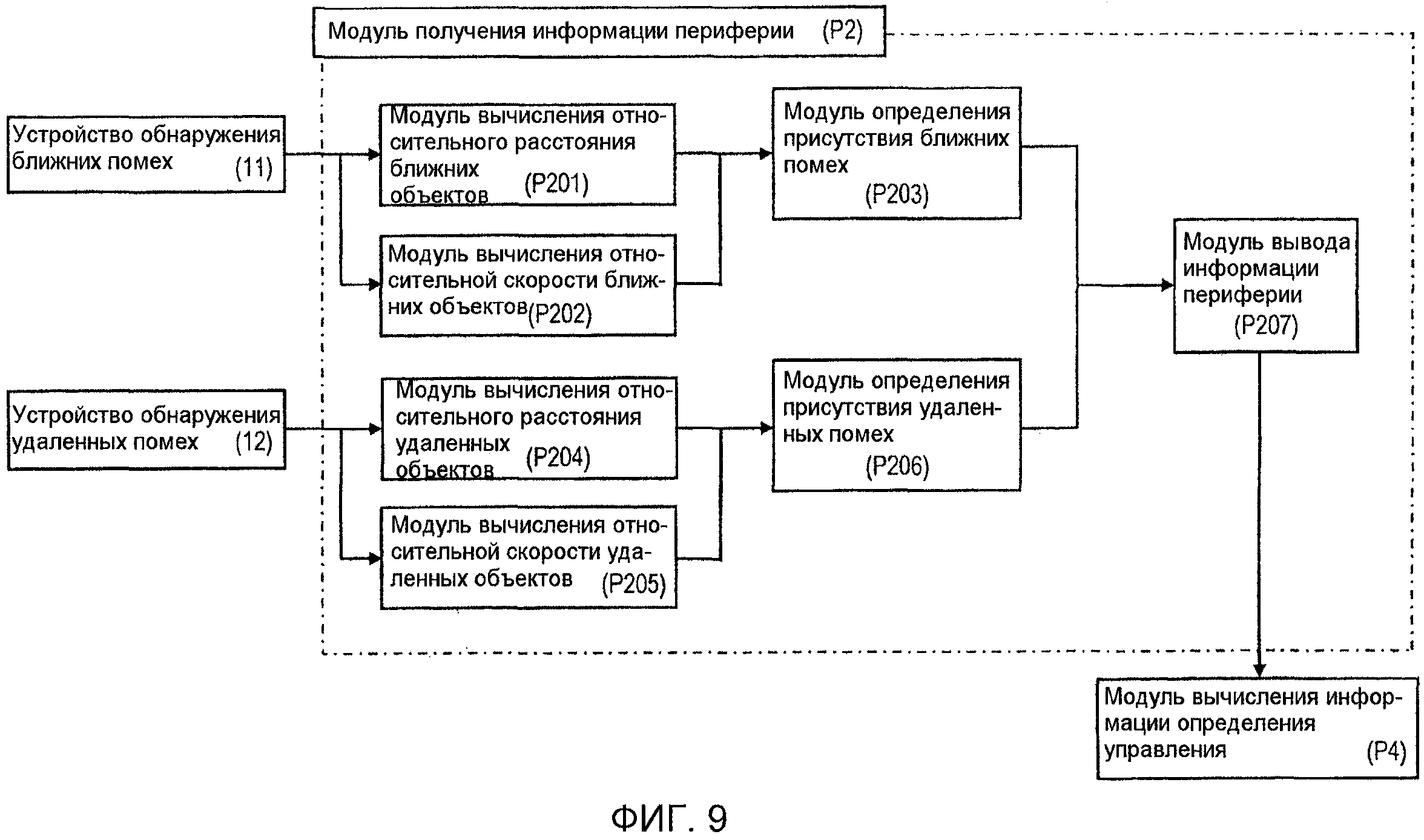
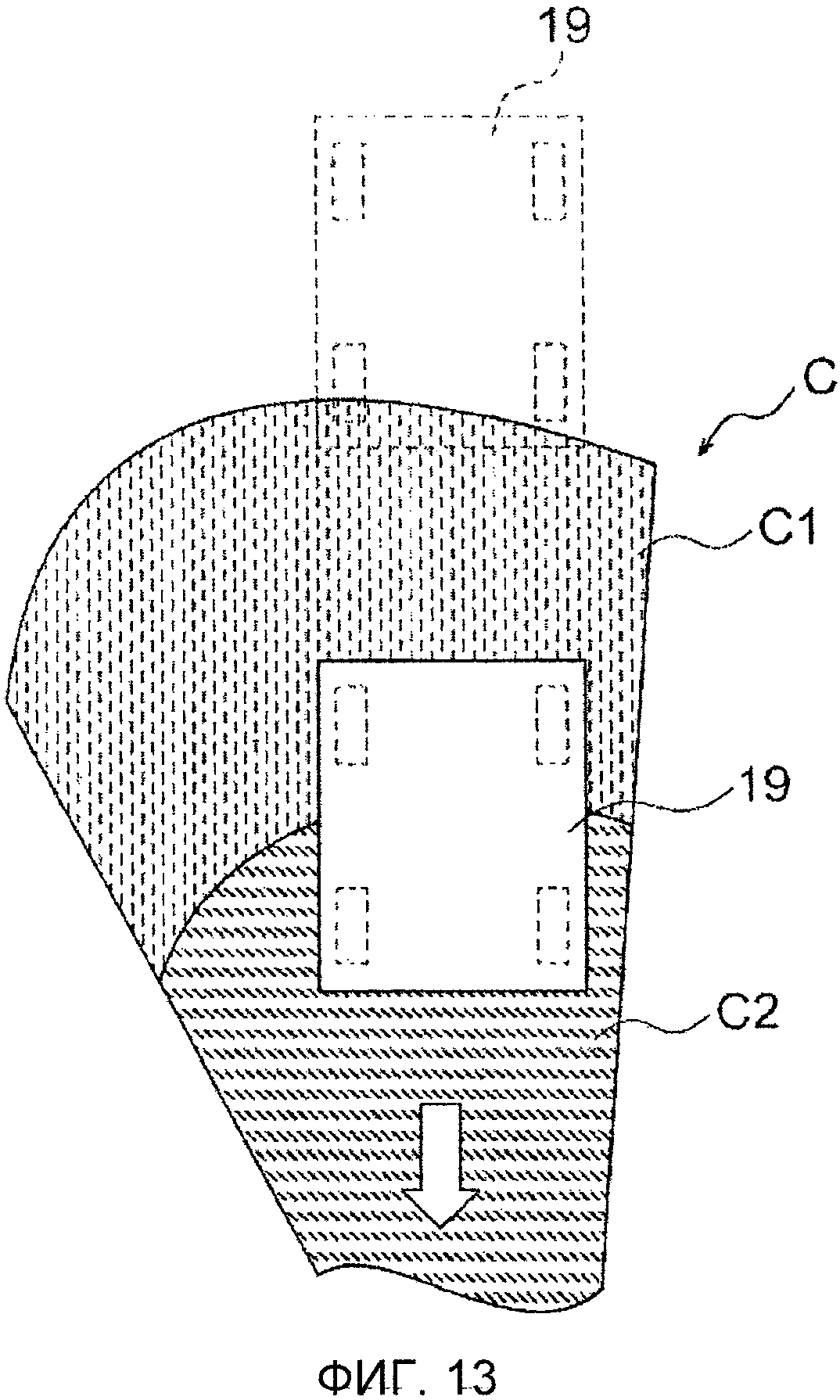
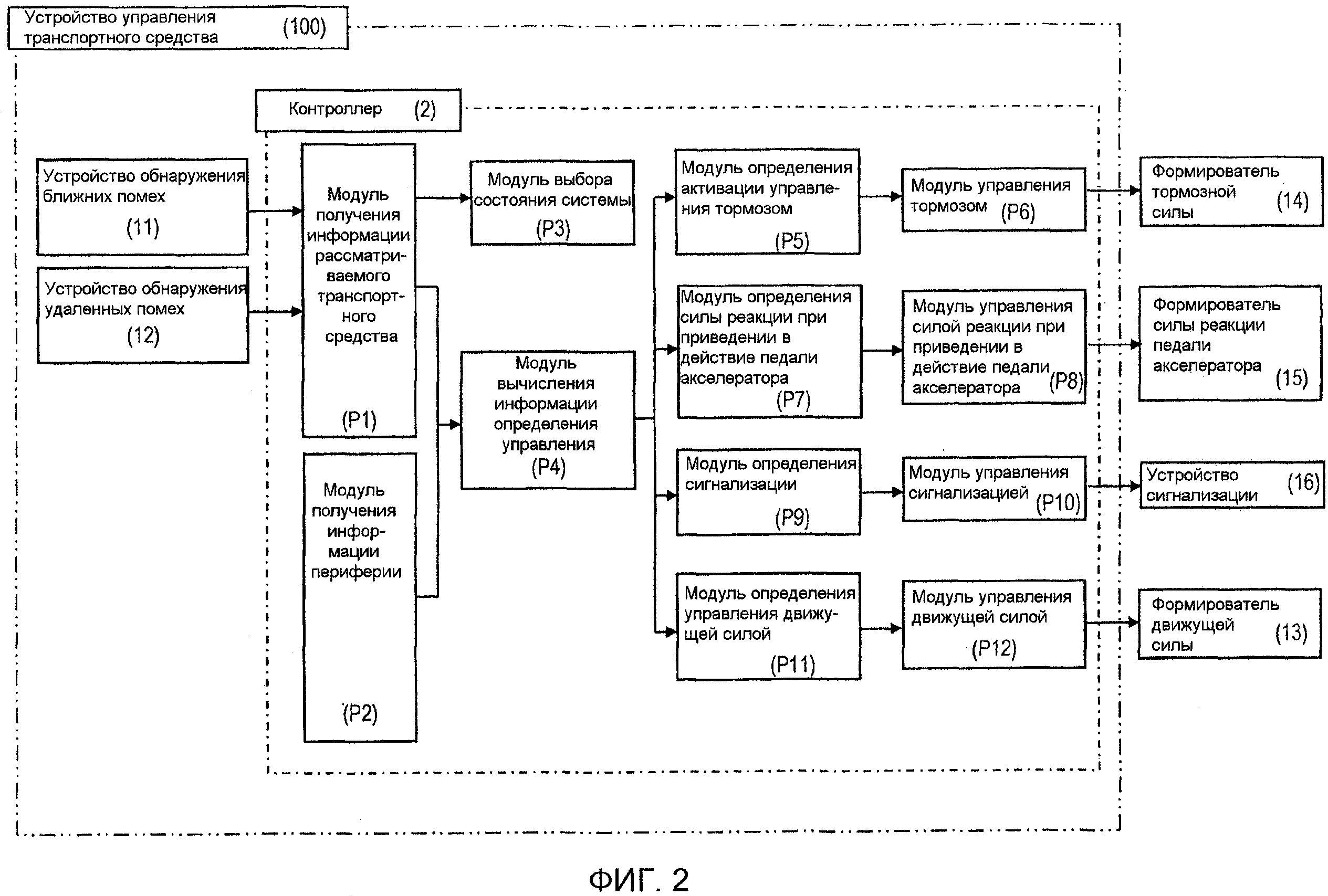
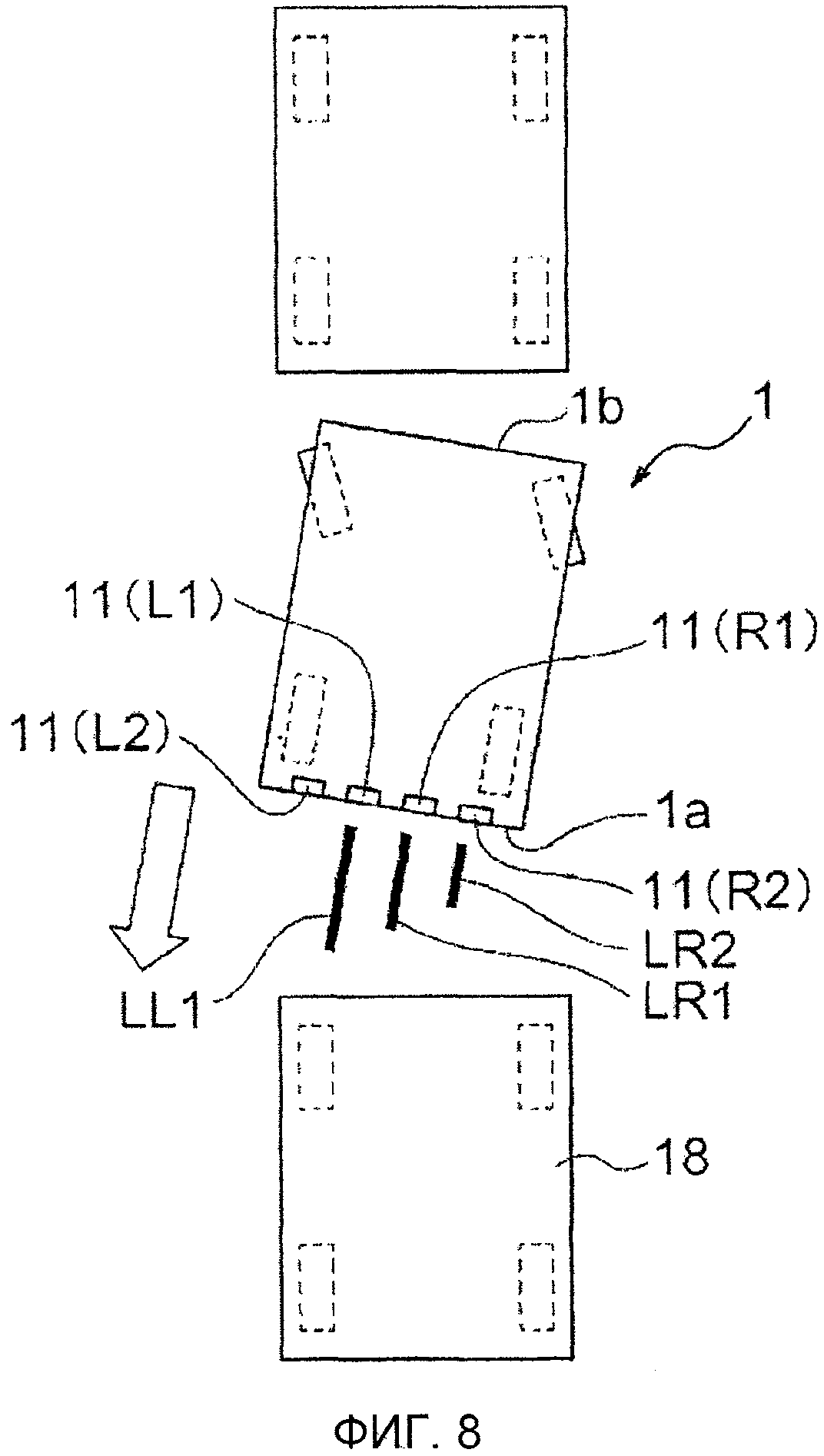
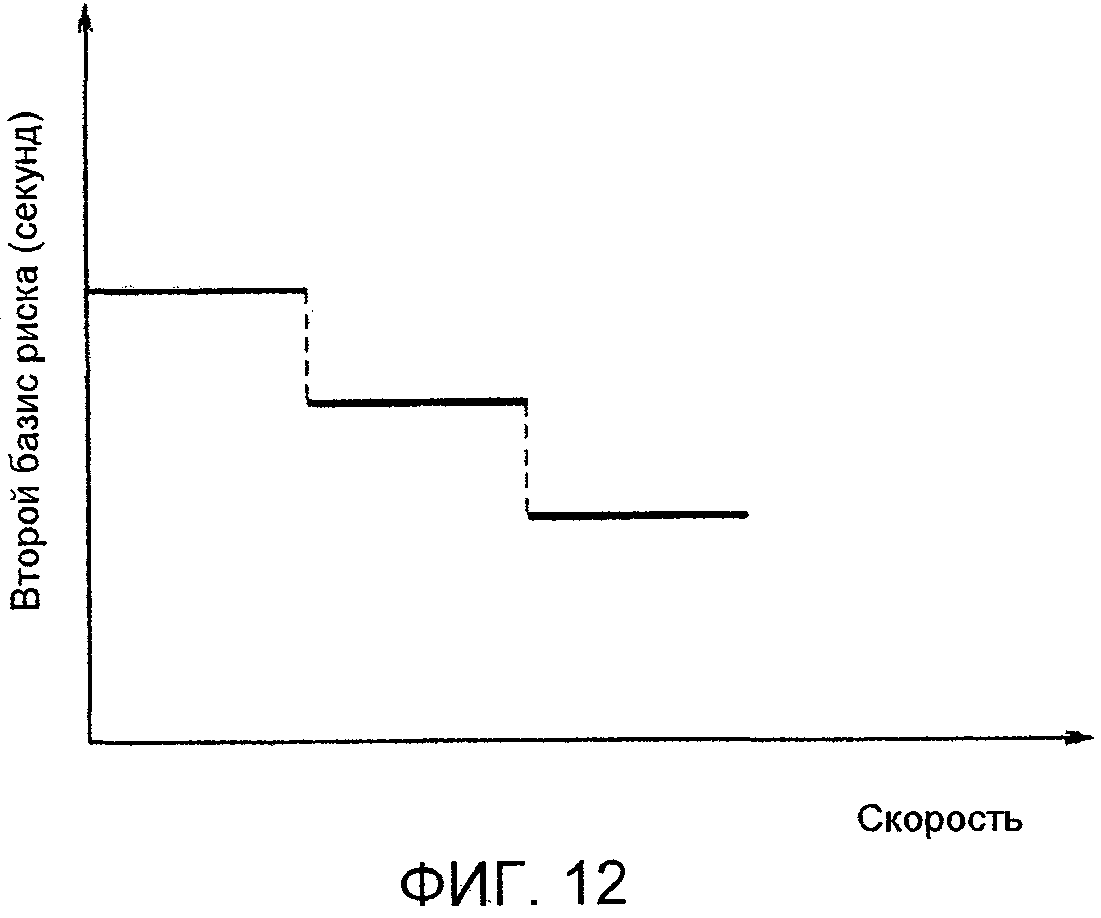
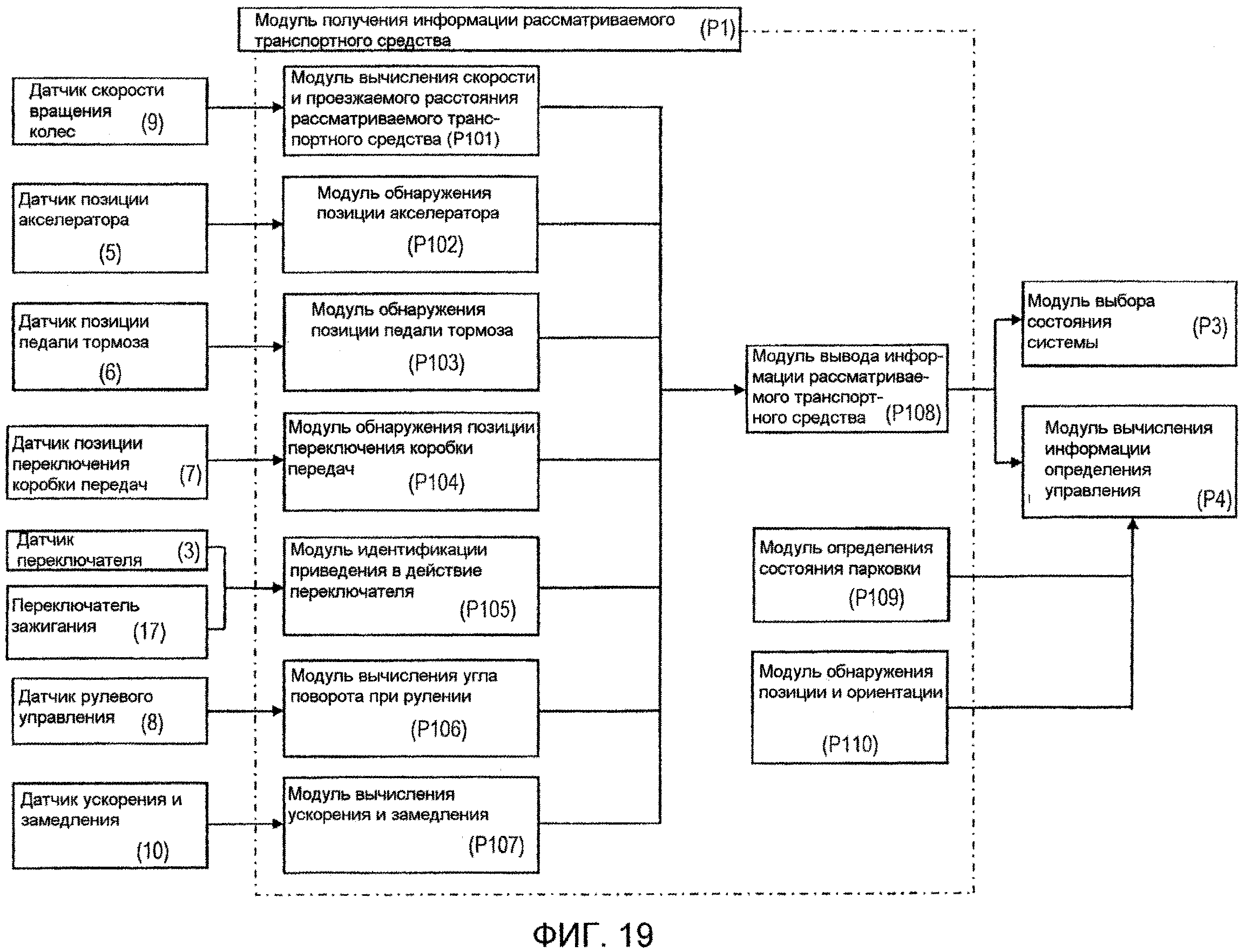
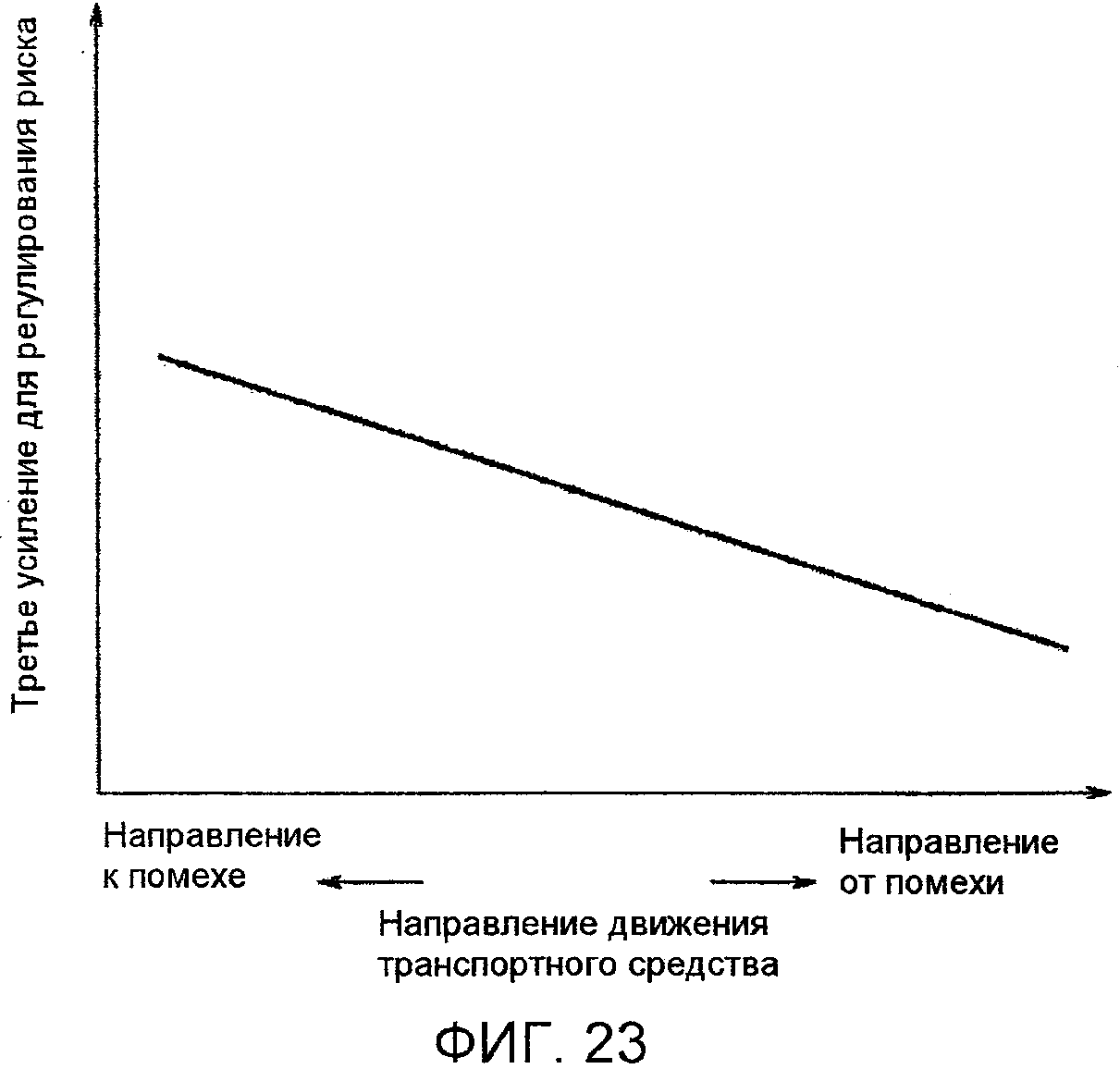
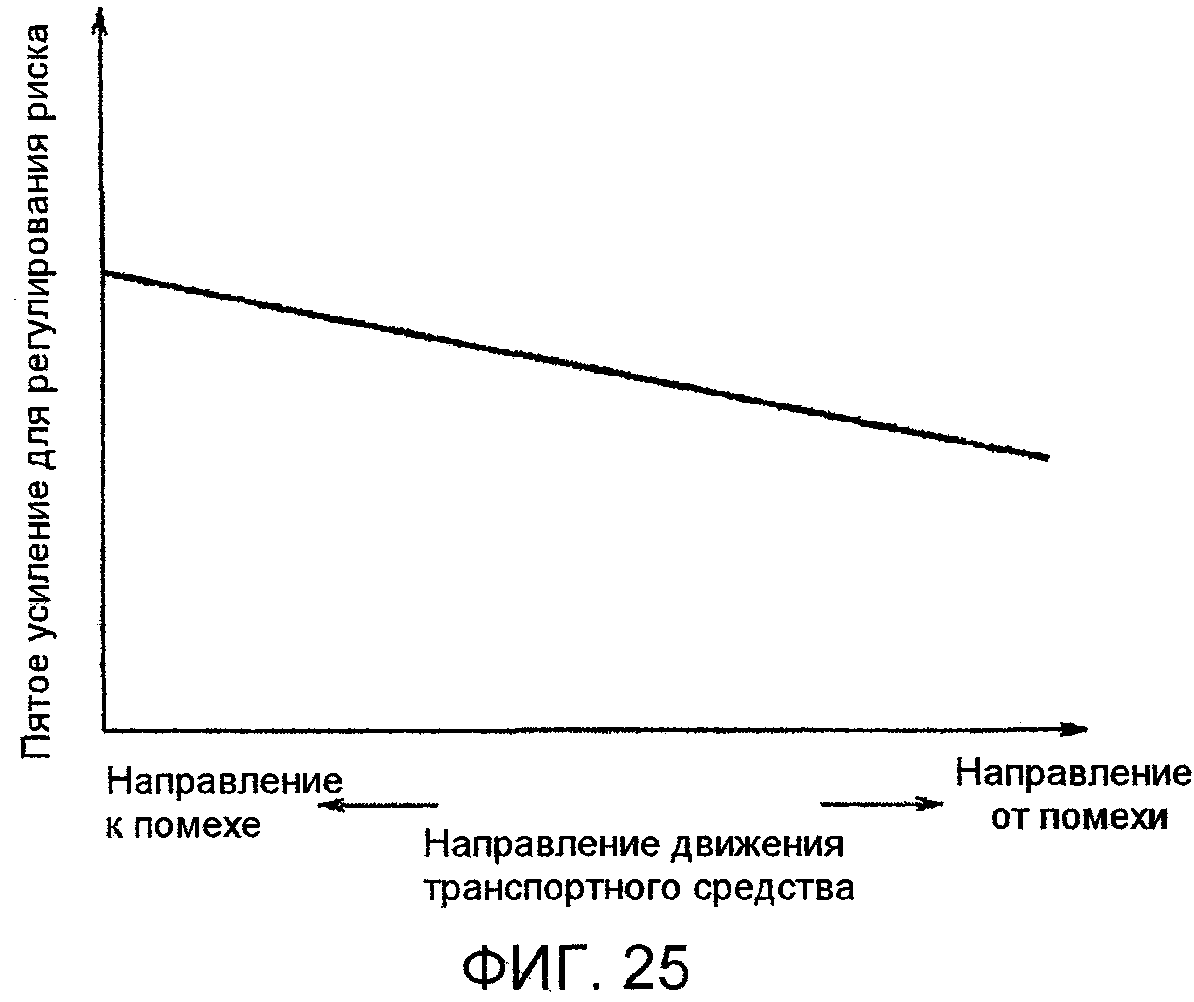
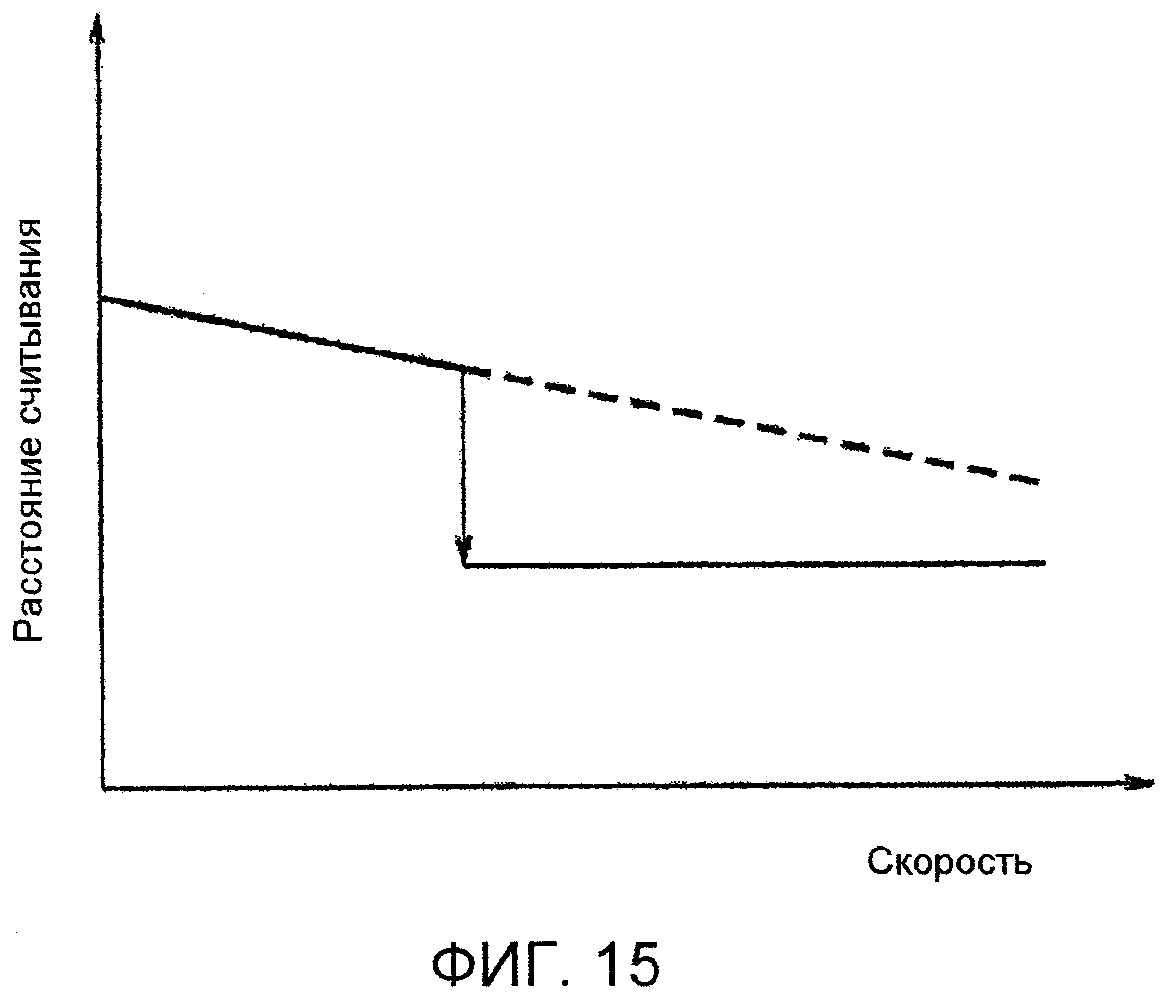

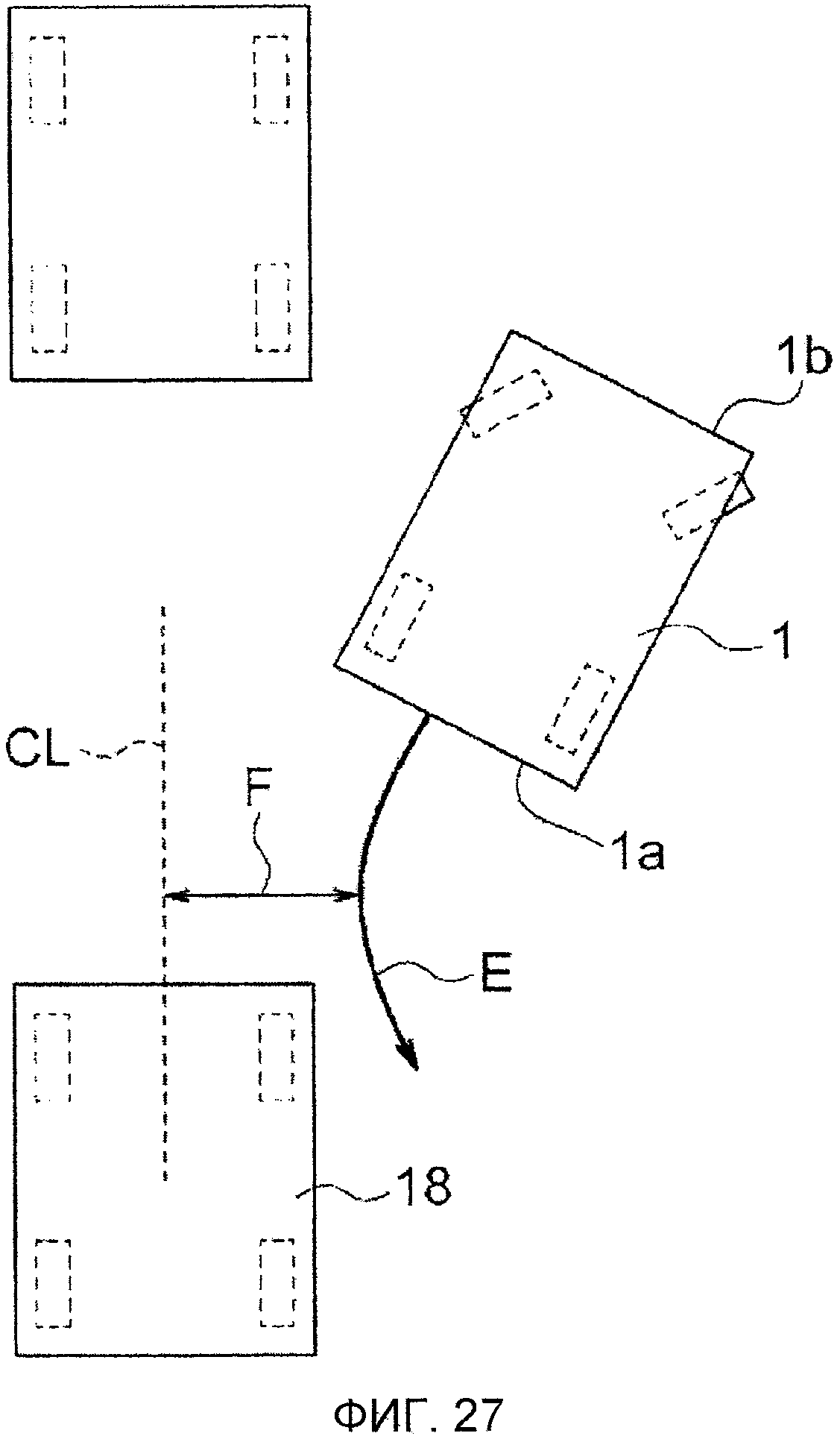
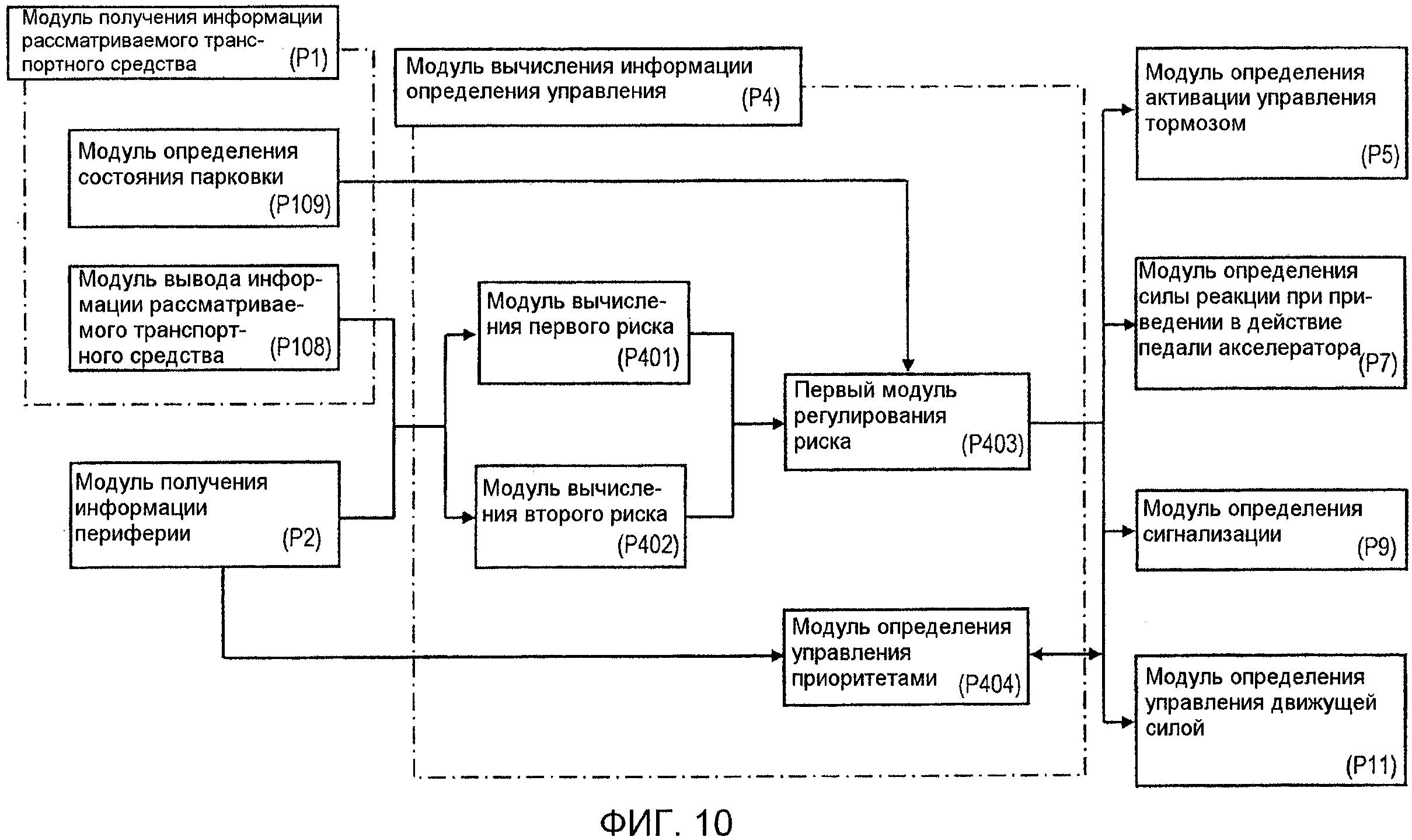
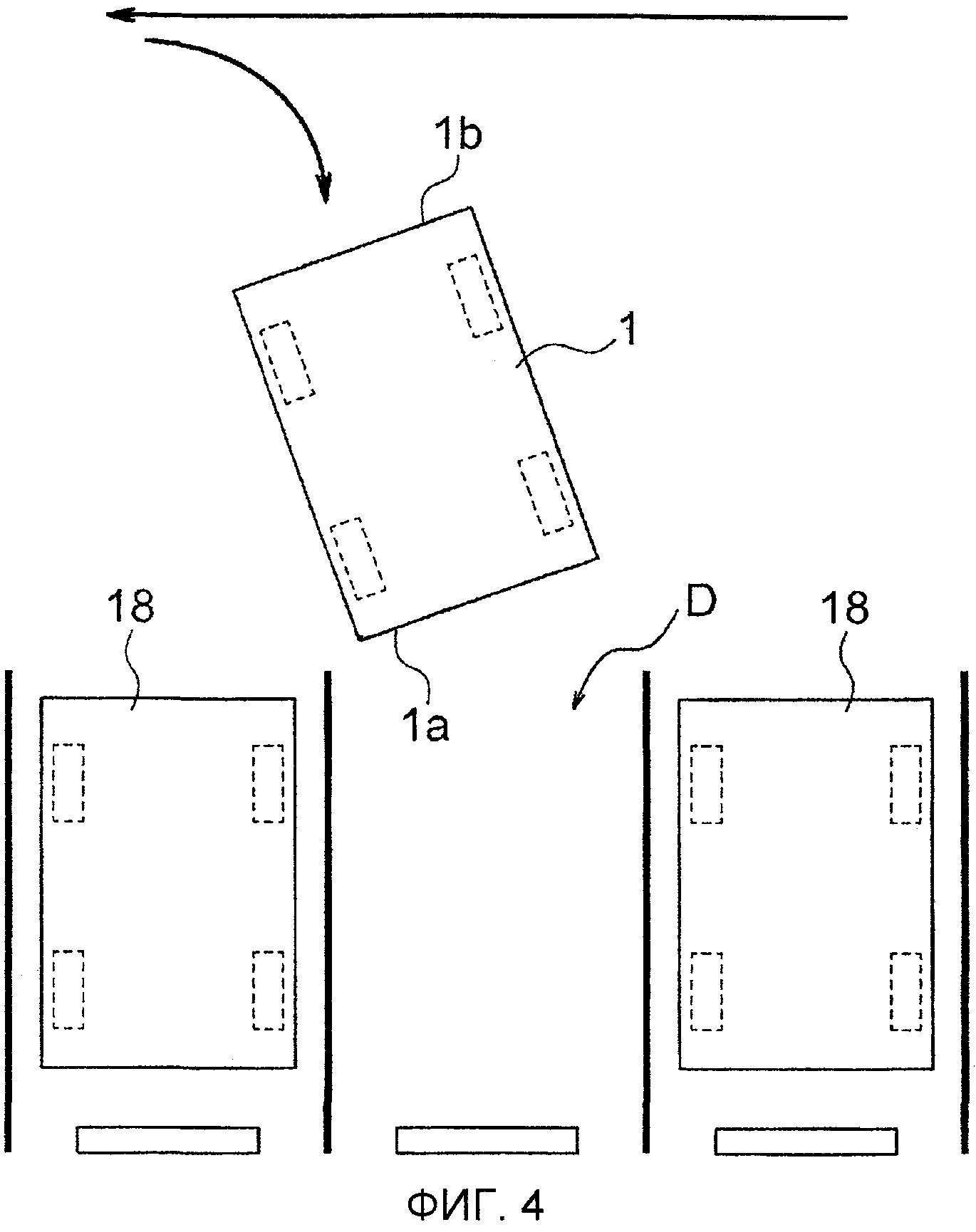
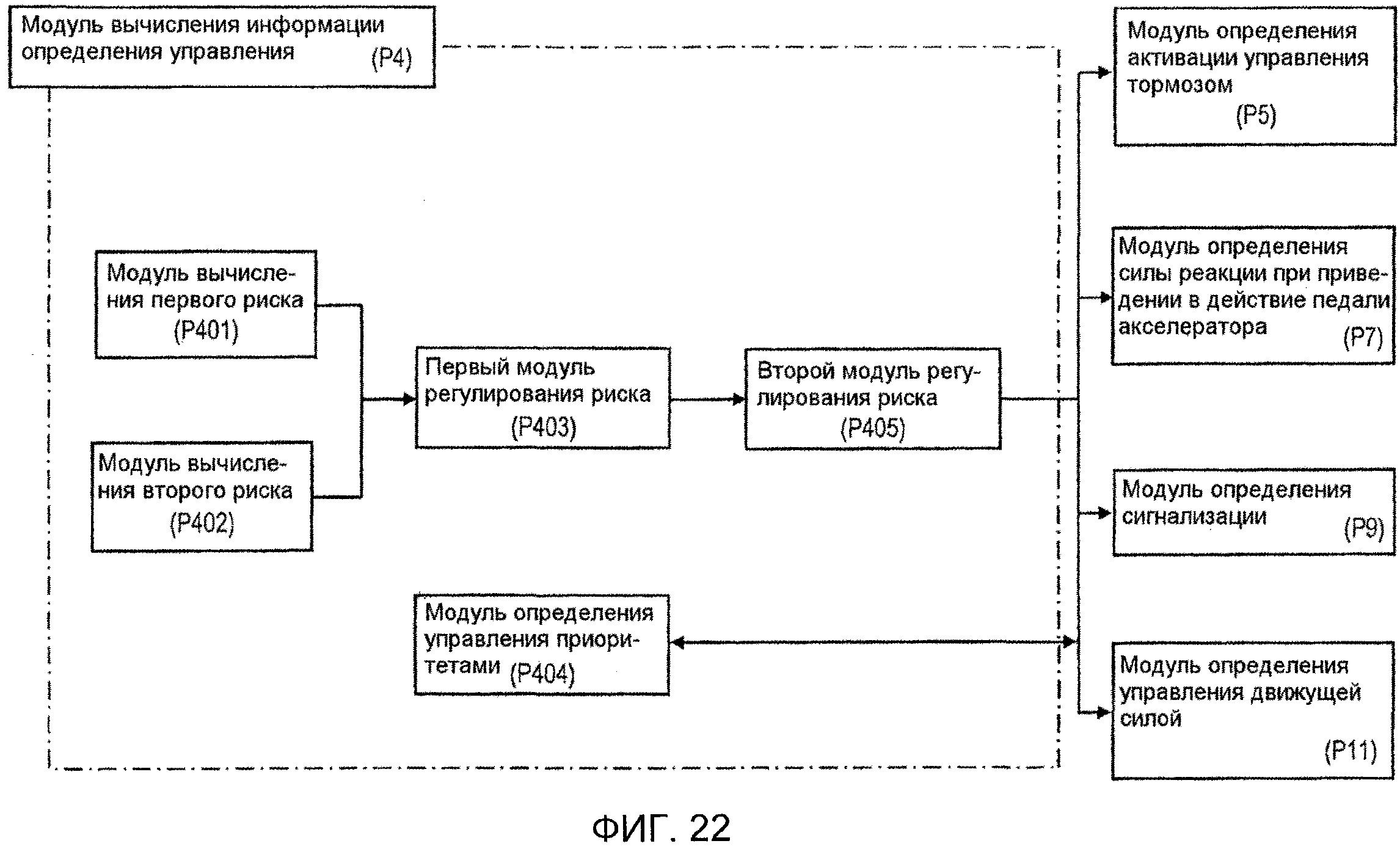
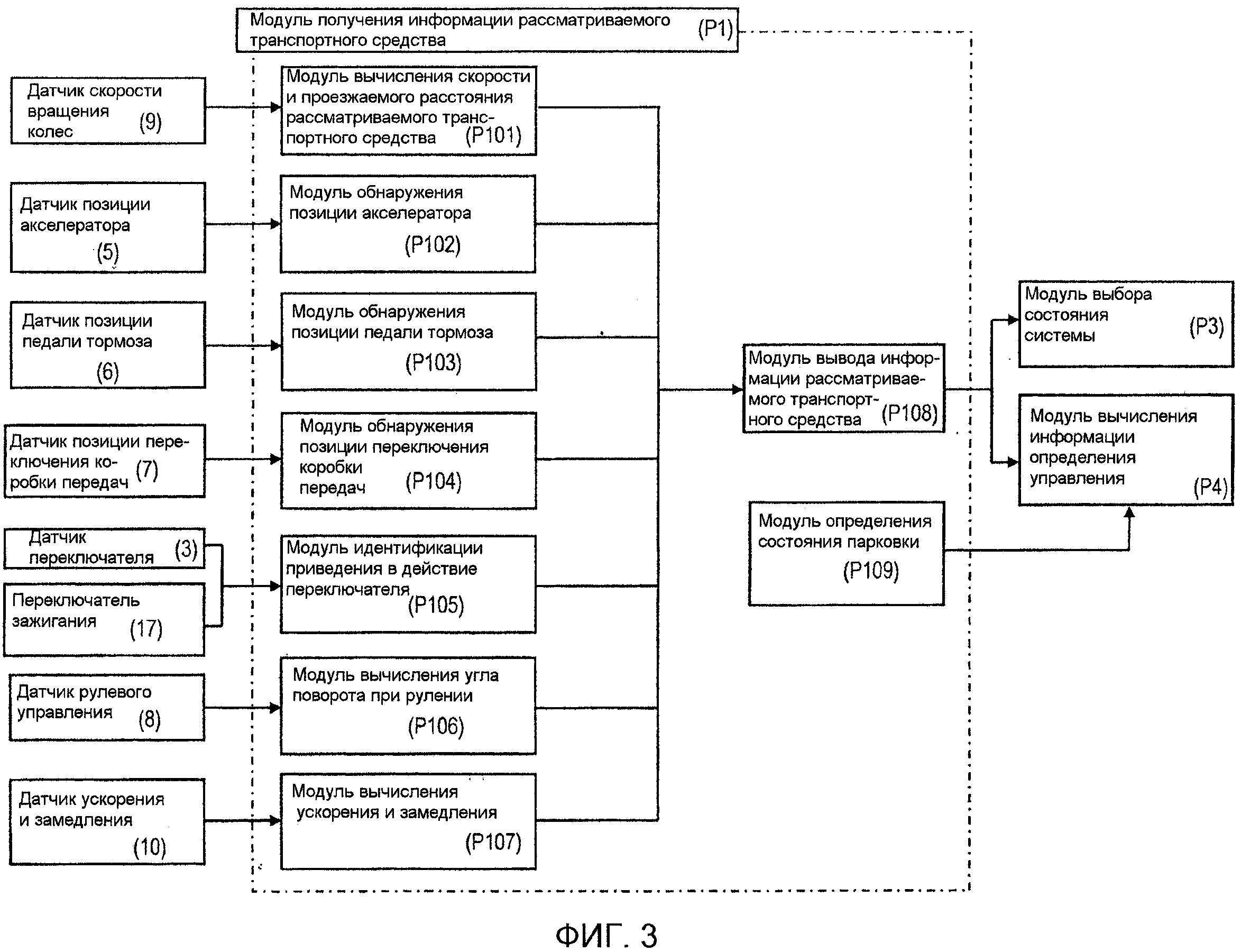
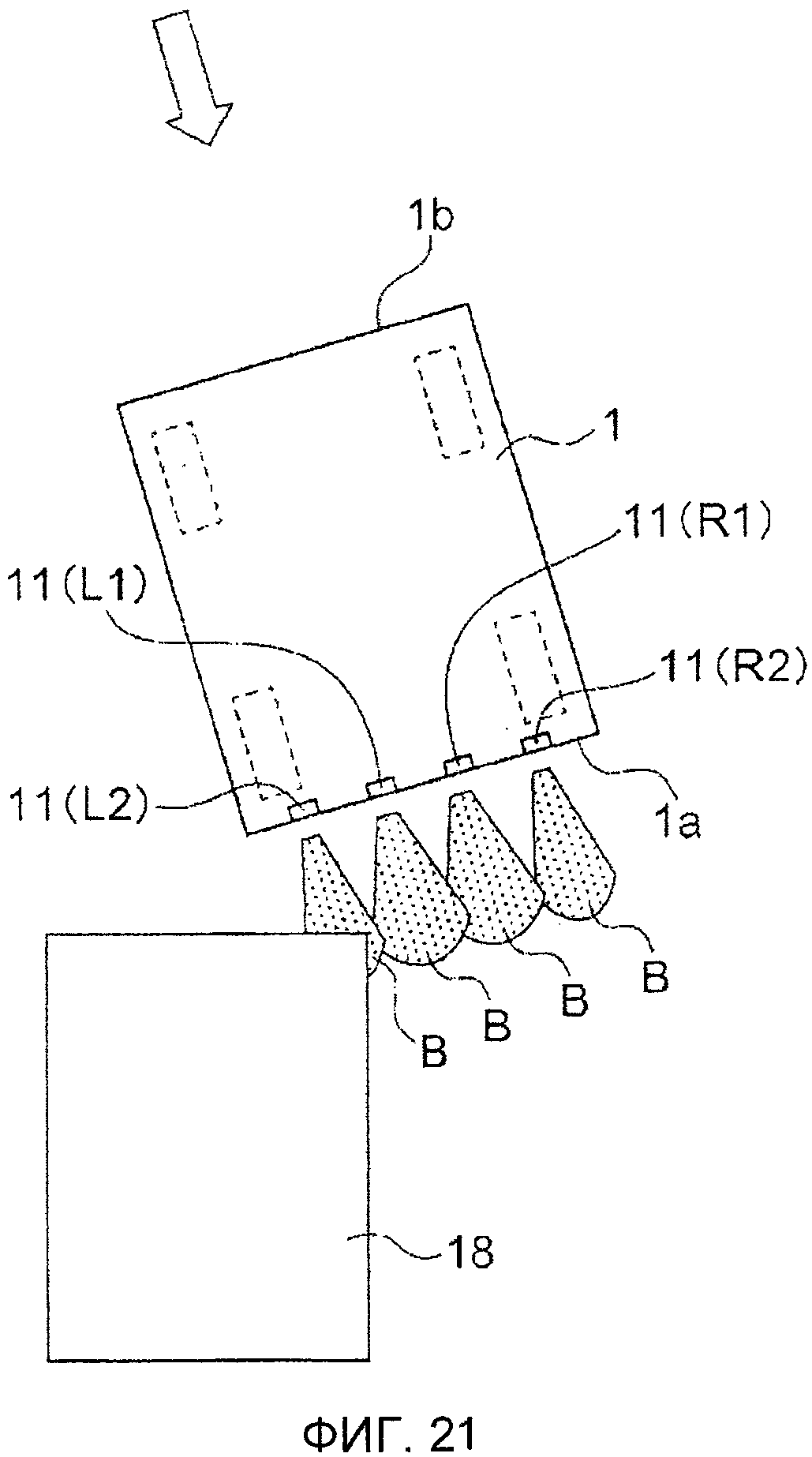
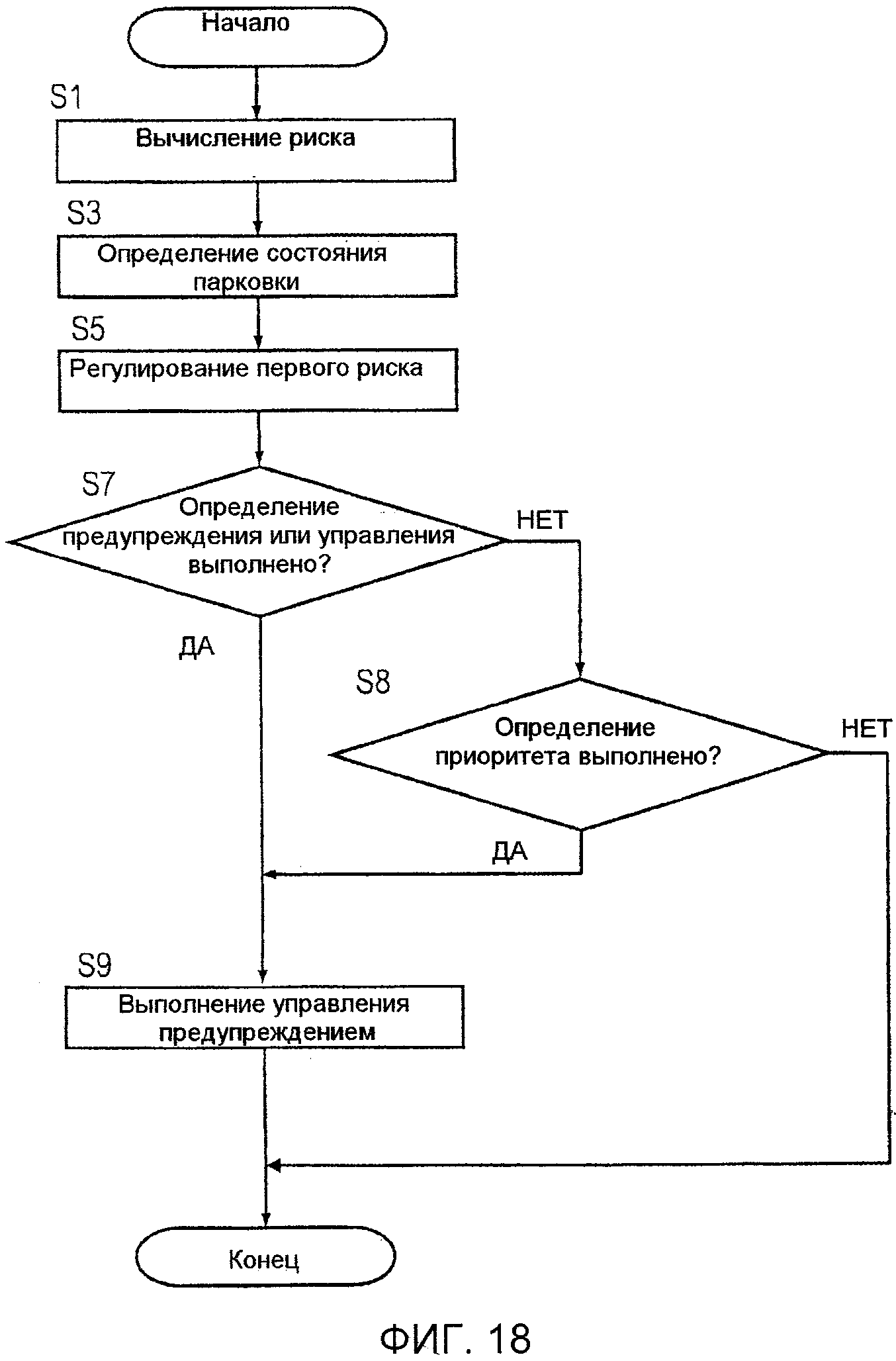
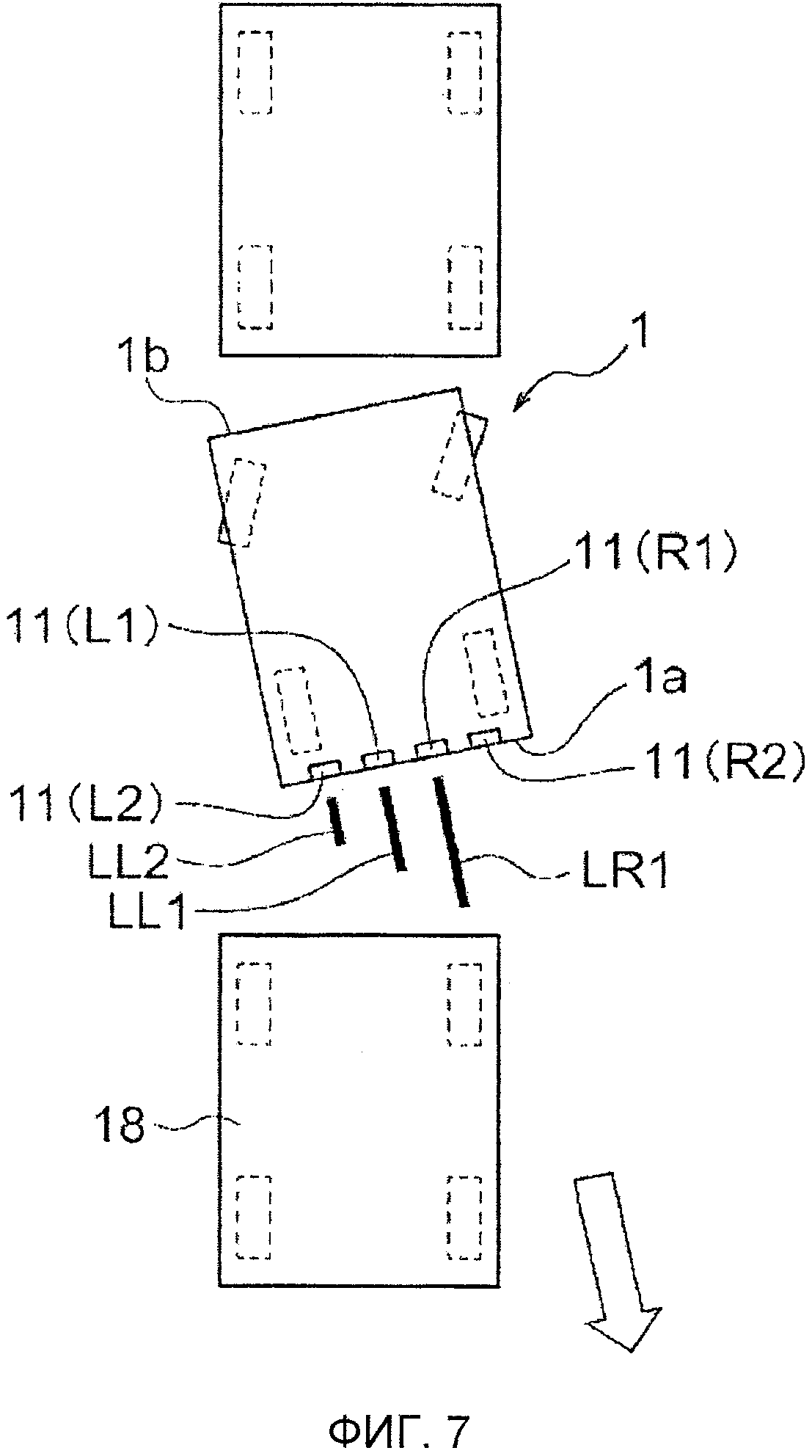
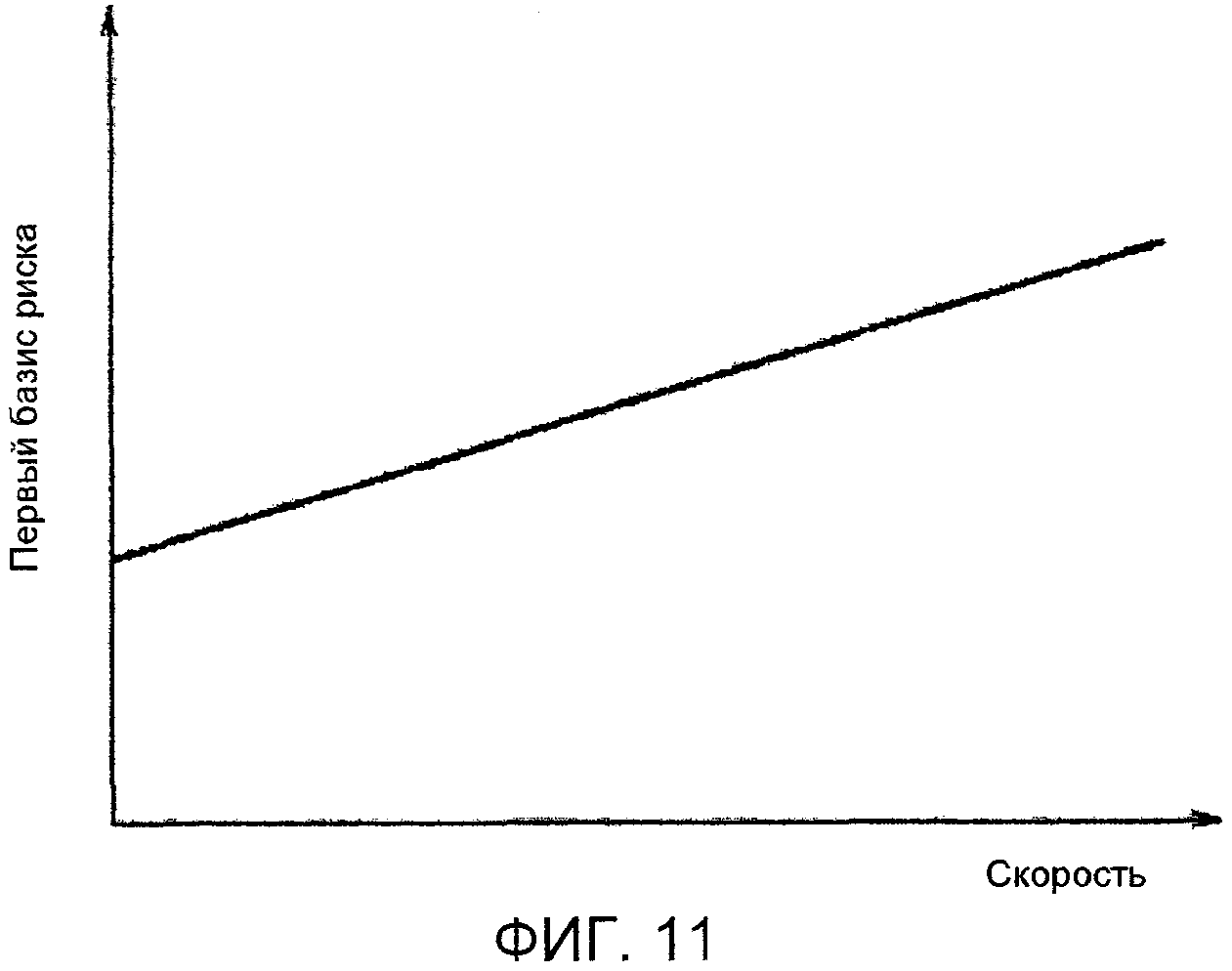
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

