Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано при управлении ориентацией космических аппаратов (КА) при выполнении экспериментов и исследований.
Известен способ управления ориентацией КА, включающий выставку осей КА и поддержание углового положения с помощью двигателей ориентации (Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. - М.: Машиностроение, 1974).
Однако для использования данного способа необходимо расходовать рабочее тело, что вызывает, кроме того, непрогнозируемые микроускорения на борту КА.
Известен способ ориентации КА, включающий выставку оси КА, соответствующей минимальному моменту инерции, на центр Земли и орбитальное смещение КА (Беляев М.Ю. Научные эксперименты на космических кораблях и орбитальных станциях. - М.: Машиностроение, 1984). Данный способ используется для КА, имеющих вытянутую форму, т.е. когда момент инерции относительно продольной оси значительно (в разы) меньше момента инерции относительно поперечных осей.
Данный способ позволяет поддерживать одноосную гравитационную ориентацию без дополнительного расхода рабочего тела на ее поддержание и тем самым, например, снизить уровень микроперегрузок, действующих на КА, но не обеспечивает учета освещенности солнечных батарей (СБ) для обеспечения требуемого для экспериментов прихода электроэнергии.
Известен способ управления ориентацией КА с неподвижными панелями солнечных батарей при выполнении экспериментов на орбитах с максимальной длительностью теневого участка (Патент РФ №2457158, приоритет от 22.09.2010, МПК (2006.01) B64G 1/24, 1/44 - прототип), включающий гравитационную ориентацию КА и закрутку вокруг его продольной оси, соответствующей минимальному моменту инерции, при нахождении Солнца в плоскости орбиты совмещают плоскость СБ с плоскостью орбиты к моменту прохождения утреннего терминатора, измеряют и отслеживают угол между перпендикуляром к активной поверхности СБ и направлением на Солнце, а закрутку КА вокруг продольной оси в направлении, соответствующем уменьшению измеряемого и отслеживаемого угла между перпендикуляром к активной поверхности СБ и направлением на Солнце, осуществляют в момент прохождения утреннего терминатора с угловой скоростью из диапазона значений ω=360°/T÷720°/T, где T - период обращения КА по орбите.
При управлении КА по способу-прототипу солнечное излучение поступает на СБ с направлений, отстоящих от нормали к рабочей поверхности СБ, вследствие чего генерируемый СБ ток отличается от максимального тока, который способны генерировать СБ. В то же время при выполнении ряда экспериментов, в которых используется энергоемкая аппаратура, желательно обеспечить максимально возможный съем электроэнергии с СБ. Кроме того, предложенный в способе-прототипе диапазон скоростей закрутки КА не охватывает некоторые возможные значения скорости закрутки КА, при которых обеспечивается устойчивость гравитационной ориентации ряда КА.
Задачей, на решение которой направлено настоящее изобретение, является повышение прихода электроэнергии от СБ КА при выполнении экспериментов и исследований в условиях вращательного движения КА.
Технический результат предлагаемого изобретения заключается в максимизации интегральной освещенности рабочей поверхности СБ за виток в режиме закрутки КА при поддержании одноосной гравитационной ориентации КА.
Технический результат достигается тем, что в способе управления ориентацией космического аппарата с неподвижными панелями солнечных батарей при выполнении экспериментов, включающем гравитационную ориентацию космического аппарата продольной осью вдоль местной вертикали и закрутку вокруг его продольной оси, соответствующей минимальному моменту инерции, дополнительно определяют угол между направлением на Солнце и плоскостью орбиты с положительным направлением отсчета угла по вектору угловой скорости орбитального движения космического аппарата, определяют высоту орбиты, по которой определяют фиксируемое значение угла между направлением на Солнце и плоскостью орбиты β*, при значениях угла между направлением на Солнце и плоскостью орбиты в диапазоне (0, β*) или менее -β* космический аппарат закручивают вокруг продольной оси с угловой скоростью 3·ωо, направленной от центра Земли, где ωо - угловая скорость орбитального движения космического аппарата, причем в момент прохождения противосолнечной точки витка нормаль к активной поверхности солнечных батарей составляет минимальный угол с вектором угловой скорости орбитального движения космического аппарата, а при значениях угла между направлением на Солнце и плоскостью орбиты в диапазоне (-β*, 0) или более β* космический аппарат закручивают вокруг продольной оси с угловой скоростью 3·ωо, направленной в центр Земли, причем на момент прохождения противосолнечной точки витка нормаль к активной поверхности солнечных батарей составляет максимальный угол с вектором угловой скорости орбитального движения космического аппарата, при этом фиксируемое значение угла между направлением на Солнце и плоскостью орбиты β* определяют как минимальное превышающее ноль значение угла между направлением на Солнце и плоскостью орбиты, при котором освещенность активной поверхности солнечных батарей за виток при закрутке космического аппарата с одними вышеописанными параметрами закрутки равна освещенности активной поверхности солнечных батарей за виток при закрутке космического аппарата с другими вышеописанными параметрами закрутки.
Суть предлагаемого изобретения поясняется на фиг.1÷3.
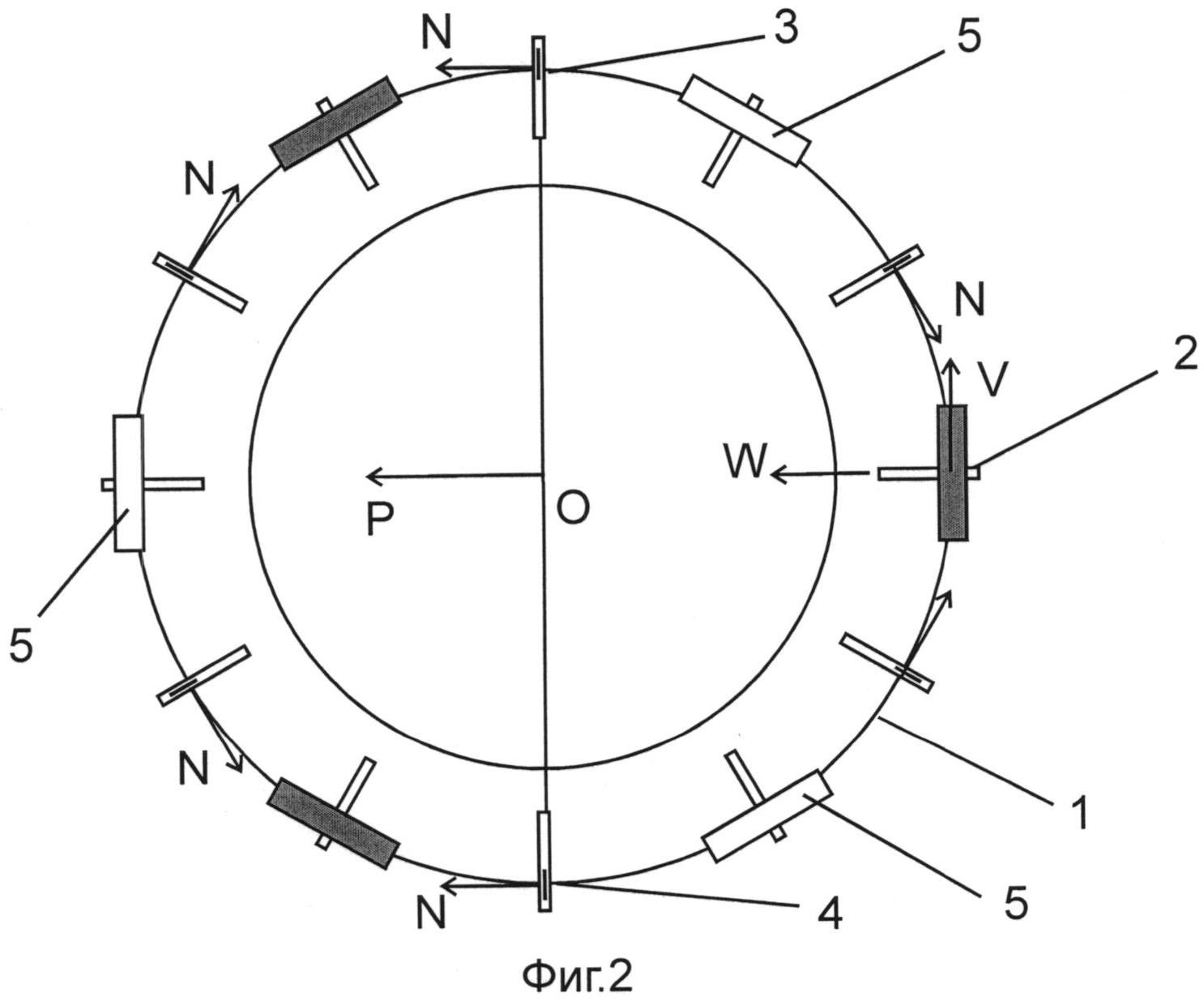
На фиг.1 и 2 представлены схемы ориентации СБ КА при поддержании гравитационной ориентации КА продольной осью вдоль местной вертикали с закруткой КА вокруг продольной оси с предлагаемыми параметрами закрутки.
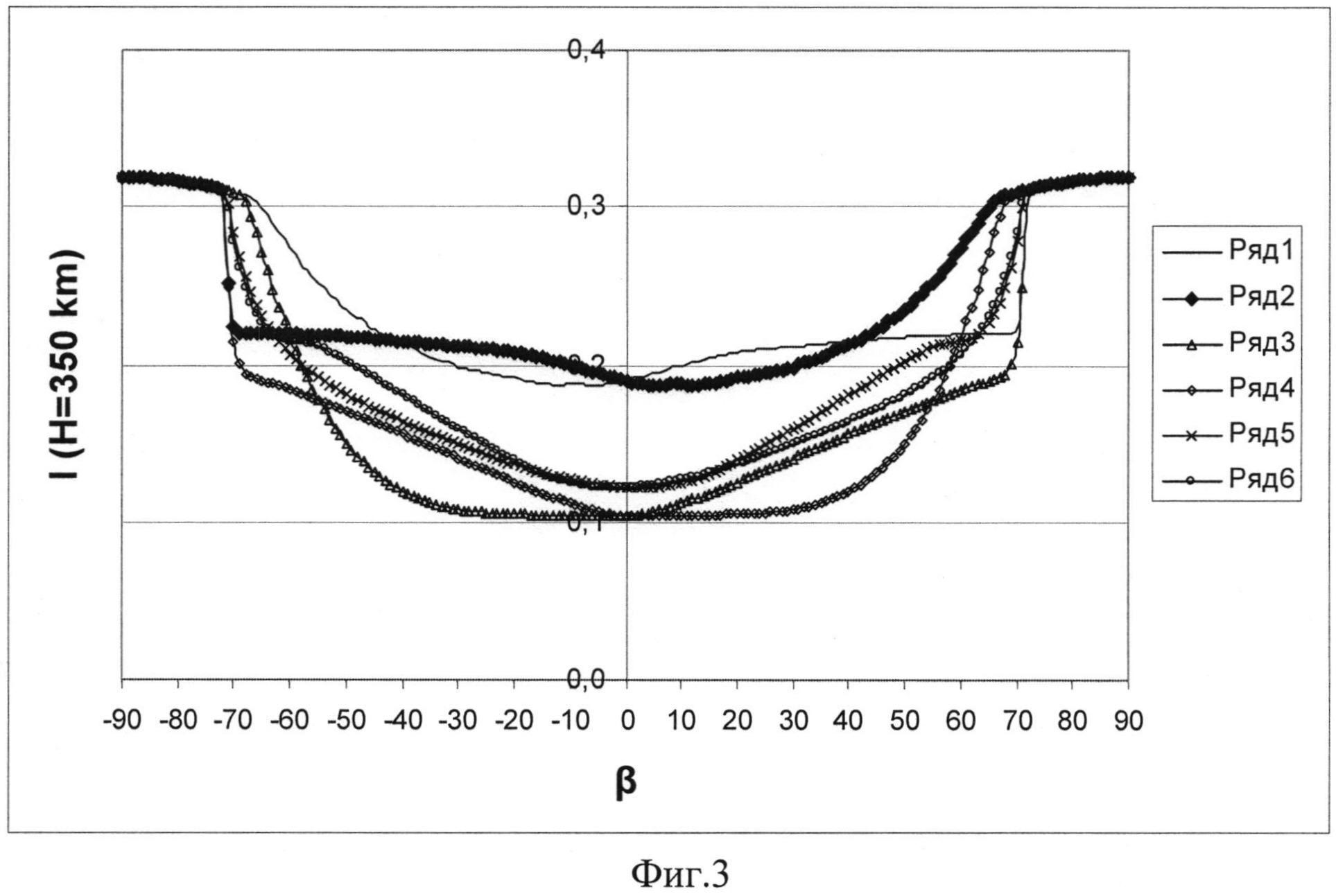
На фиг.3 представлены графики, иллюстрирующие определение фиксируемого значения угла между направлением на Солнце и плоскостью орбиты β*.
На фиг.1 и 2 введены обозначения:
1 - орбита КА;
2 - противосолнечная точка витка орбиты;
3, 4 - точки утреннего и вечернего терминаторов соответственно;
5 - активная поверхность СБ,
V - вектор скорости КА,
N - нормаль к активной поверхности СБ;
W - вектор угловой скорости закрутки КА вокруг продольной оси,
P - проекция солнечного направления на плоскость орбиты;
Поясним предложенные в способе действия.
Определяют угол β между направлением на Солнце и плоскостью орбиты КА с положительным направлением отсчета угла по вектору угловой скорости орбитального движения КА. Направление вектора угловой скорости орбитального движения КА совпадает с направлением нормали к плоскости орбиты.
Определяют высоту орбиты, по которой определяют фиксируемое значение угла между направлением на Солнце и плоскостью орбиты β*.
При значениях угла между направлением на Солнце и плоскостью орбиты в диапазоне (0, β*) или менее -β* выполняют гравитационную ориентацию КА продольной осью вдоль местной вертикали с закруткой КА вокруг продольной оси с угловой скоростью 3·ωо, направленной от центра Земли, где ωо - модуль угловой скорости орбитального движения КА, при этом ориентацию КА в момент закрутки выбирают из условия, что в момент прохождения противосолнечной точки витка нормаль к активной поверхности СБ составляет минимальный угол с вектором угловой скорости орбитального движения КА. Схема ориентации СБ в данной закрутке для случая, когда нормаль к активной поверхности СБ перпендикулярна продольной оси КА, представлена на фиг.1. Данные параметры закрутки КА условно называем «первым» вариантом параметров закрутки.
При значениях угла между направлением на Солнце и плоскостью орбиты в диапазоне (-β*, 0) или более β* выполняют гравитационную ориентацию КА продольной осью вдоль местной вертикали с закруткой КА вокруг продольной оси с угловой скоростью 3·ωо, направленной в центр Земли, при этом ориентацию КА в момент закрутки выбирают из условия, что в момент прохождения противосолнечной точки витка нормаль к активной поверхности СБ составляет максимальный угол с вектором угловой скорости орбитального движения КА. Схема ориентации СБ в данной закрутке для случая, когда нормаль к активной поверхности СБ перпендикулярна продольной оси КА, представлена на фиг.2. Данные параметры закрутки КА условно называем «вторым» вариантом параметров закрутки.
Гравитационную ориентации КА продольной осью вдоль местной вертикали и закрутку КА вокруг продольной оси с описанными параметрами закрутки выполняют, например, следующим образом.
Выполняют построение гравитационной ориентации КА продольной осью вдоль местной вертикали, для чего ориентируют КА продольной осью вдоль местной вертикали и придают КА вращение вокруг оси, направленной по нормали к плоскости орбиты КА с угловой скоростью, равной угловой скорости орбитального движения КА.
На фоне данной гравитационной ориентации КА при β≤-β* или 0≤β≤β* разворачивают КА вокруг его продольной оси до достижения к моменту закрутки (к моменту выдачи импульса закрутки) углом между проекцией нормали к активной поверхности СБ на плоскость местного горизонта и вектором угловой скорости орбитального движения КА значения

и углом между проекцией нормали к активной поверхности СБ на плоскость местного горизонта и вектором скорости КА значения

где Δt - интервал времени от момента прохождения противосолнечной точки витка орбиты до момента закрутки,
и в момент достижения вышеупомянутыми углами задаваемых значений выполняют закрутку КА вокруг продольной оси с угловой скоростью 3·ωо, направленной от центра Земли.
При -β*≤β≤0 или β*≤β разворачивают КА вокруг его продольной оси до достижения к моменту закрутки углом между проекцией нормали к активной поверхности СБ на плоскость местного горизонта и вектором угловой скорости орбитального движения КА значения

и углом между проекцией нормали к активной поверхности СБ на плоскость местного горизонта и вектором скорости КА значения

и в момент достижения вышеупомянутыми углами задаваемых значений выполняют закрутку КА вокруг продольной оси с угловой скоростью 3·ωо, направленной в сторону центра Земли.
Таким образом, первый и второй вышеописанные варианты закрутки КА вокруг продольной оси реализуются путем построения на момент закрутки исходной ориентации КА, задаваемой соответствующими углами (1)-(2) и (3)-(4).
Предложенное значение угловой скорости закрутки КА 3·ωо удовлетворяет условию обеспечения необходимой степени устойчивости поддержания гравитационной ориентации такого типа КА как, например, транспортный грузовой корабль (ТГК) «Прогресс», у которого поперечные главные центральные моменты инерции примерно в 7 раз превышают минимальный главный центральный момент инерции. Необходимая степень устойчивости поддержания гравитационной ориентации КА соответствует такому процессу вращения КА, при котором отклонение продольной оси данного КА от местной вертикали, возникающее за счет компонент угловой скорости вокруг поперечных осей, в необходимой степени компенсируется за счет вращения КА вокруг продольной оси, и вместе с тем вращение КА вокруг продольной оси не приводит к гироскопической устойчивости данной оси КА в инерциальном пространстве.
Фиксируемое значение угла между направлением на Солнце и плоскостью орбиты β* определяется как минимальное положительное ненулевое значение угла между направлением на Солнце и плоскостью орбиты, при котором освещенность активной поверхности СБ за виток при закрутке КА с одними вышеописанными параметрами закрутки равна освещенности активной поверхности СБ за виток при закрутке КА с другими вышеописанными параметрами закрутки.
Параметры выполняемой закрутки КА выбираются из двух вышеописанных вариантов в зависимости от текущего значения угла между направлением на Солнце и плоскостью орбиты β и от определяемого по высоте орбиты КА фиксируемого значения угла между направлением на Солнце и плоскостью орбиты β*.
Значение β* определяется следующим образом. Обозначим:
I1 - суммарная освещенность активной поверхности СБ за виток при закрутке КА вокруг его продольной оси с угловой скоростью 3·ωо, направленной от центра Земли, при которой в момент прохождения противосолнечной точки витка нормаль к активной поверхности СБ составляет минимальный угол с вектором угловой скорости орбитального движения КА («первый» вариант параметров закрутки),
I2 - суммарная освещенность активной поверхности СБ за виток при закрутке КА вокруг его продольной оси с угловой скоростью 3·ωо, направленной в центр Земли, причем на момент прохождения противосолнечной точки витка нормаль к активной поверхности СБ составляет максимальный угол с вектором угловой скорости орбитального движения КА («второй» вариант параметров закрутки).
Освещенность СБ характеризуется косинусом угла между направлением на Солнце и нормалью к активной поверхности СБ.
I1 и I2 являются функциями угла между направлением на Солнце и плоскостью орбиты β и от высоты орбиты КА H. Следовательно, значение β*, определяемое как минимальное положительное ненулевое значение угла между направлением на Солнце и плоскостью орбиты, при котором I1=I2, также зависит от высоты орбиты КА.
Для иллюстрации определения значения β* на фиг.3 представлены графики зависимостей I1(β,H), I2(β,H) от угла β (Ряды 1 и 2, соответственно) для КА, нормаль к активной поверхности СБ которого перпендикулярна продольной оси КА (например, транспортный грузовой корабль (ТГК) «Прогресс») для высоты околокруговой орбиты КА H=350 км. Графики I1(β,H) и I2(β,H) пересекаются в точках I1(β,H)=I2(β,H), достигаемых при β=±β*, β*≈41,5°. Значение β* зависит от высоты орбиты: например, для H=300 км β*≈46,5°, для H=400 км β*≈36,5°. Кроме этого равенство I1(β,H)=I2(β,H) выполняется при любой высоте орбиты КА при расположении Солнца в плоскости орбиты (при β=0) и на солнечных орбитах (при  , где Re - радиус Земли).
, где Re - радиус Земли).
Представленные графики иллюстрируют следующую зависимость, используемую при выборе параметров закрутки КА:
- при β≤-β* и при 0≤β≤β* I1≥I2, поэтому в этом случае выполняют закрутку КА с первым описанным вариантом параметров закрутки, чем обеспечивают максимальную освещенность СБ КА за виток при данных значениях β;
- при -β*≤β≤0 и при β*≤β I1≤I2, поэтому в этом случае выполняют закрутку КА со вторым описанным вариантом параметров закрутки, чем обеспечивают максимальную освещенность СБ КА за виток при данных значениях β.
За счет выполнения предлагаемых действий суммарно за виток будет обеспечиваться максимальная освещенность СБ и, следовательно, будет достигаться максимально возможный для данного конкретного КА приход электроэнергии за виток. При этом предложенное значение угловой скорости закрутки обеспечивает цикличное повторение ориентации СБ относительно потока солнечного излучения на последующих витках - таким образом достигается постоянство снабжения КА необходимой электроэнергией от СБ на всех последующих витках поддержания закрутки КА.
Для иллюстрации этого на фиг.3 также представлены графики суммарных освещенностей активной поверхности СБ за виток при параметрах закрутки, отличных от предложенных:
Ряд 3 - скорость закрутки направлена к центру Земли, в противосолнечной точке витка нормаль к активной поверхности СБ направлена по вектору угловой скорости орбитального движения КА;
Ряд 4 - скорость закрутки направлена от центра Земли, в противосолнечной точке витка нормаль к активной поверхности СБ направлена против вектора угловой скорости орбитального движения КА;
Ряд 5 - скорость закрутки направлена от центра Земли, в противосолнечной точке витка нормаль к активной поверхности СБ лежит в плоскости орбиты (параллельна вектору скорости КА);
Ряд 6 - скорость закрутки направлена к центру Земли, в противосолнечной точке витка нормаль к активной поверхности СБ лежит в плоскости орбиты (параллельна вектору скорости КА).
Представленные графики иллюстрируют, что предлагаемые действия обеспечивают максимизацию суммарной освещенности активной поверхности СБ за виток в зависимости от высоты орбиты и измеряемого угла между направлением на Солнце и плоскостью орбиты КА.
Опишем технический эффект предлагаемого изобретения.
Предлагаемое изобретение повышает приход электроэнергии от СБ КА при выполнении экспериментов и исследований в условиях вращательного движения КА путем обеспечения максимизации суммарной освещенности активной поверхности СБ за виток в режиме закрутки при одноосной гравитационной ориентации КА.
При этом предложенные параметры закрутки КА, удовлетворяя условию обеспечения необходимой степени устойчивости поддержания гравитационной ориентации КА, обеспечивают такое соотношение значений угловой скорости закрутки и орбитальной угловой скорости движения КА, при котором обеспечивается максимальная суммарная освещенность активной поверхности СБ за виток.
В настоящее время технически все готово для реализации предложенного способа в таком КА, как ТГК «Прогресс».
Для реализации определения угла между направлением на Солнце и плоскостью орбиты, разворотов, закрутки и вычислений могут использоваться штатные средства системы управления ТГК «Прогресс» - система управления движением и навигацией, включая систему автономной навигации, солнечные датчики, датчики угловой скорости, двигатели ориентации, бортовой вычислитель и т.д. Закрутка корабля может производиться на время, необходимое для проведения экспериментов, и достигать десятки витков.
Способ управления ориентацией космического аппарата с неподвижными панелями солнечных батарей при выполнении экспериментов, включающий гравитационную ориентацию космического аппарата продольной осью вдоль местной вертикали и закрутку вокруг его продольной оси, соответствующей минимальному моменту инерции, отличающийся тем, что определяют угол между направлением на Солнце и плоскостью орбиты с положительным направлением отсчета угла по вектору угловой скорости орбитального движения космического аппарата, определяют высоту орбиты, по которой определяют фиксируемое значение угла между направлением на Солнце и плоскостью орбиты β, при значениях угла между направлением на Солнце и плоскостью орбиты в диапазоне (0, β) или менее - β космический аппарат закручивают вокруг продольной оси с угловой скоростью 3·ω, направленной от центра Земли, где ω - угловая скорость орбитального движения космического аппарата, причем в момент прохождения противосолнечной точки витка нормаль к активной поверхности солнечных батарей составляет минимальный угол с вектором угловой скорости орбитального движения космического аппарата, а при значениях угла между направлением на Солнце и плоскостью орбиты в диапазоне (-β, 0) или более β космический аппарат закручивают вокруг продольной оси с угловой скоростью 3·ω, направленной в центр Земли, причем на момент прохождения противосолнечной точки витка нормаль к активной поверхности солнечных батарей составляет максимальный угол с вектором угловой скорости орбитального движения космического аппарата, при этом фиксируемое значение угла между направлением на Солнце и плоскостью орбиты β определяют как минимальное превышающее ноль значение угла между направлением на Солнце и плоскостью орбиты, при котором освещенность активной поверхности солнечных батарей за виток при закрутке космического аппарата с одними вышеописанными параметрами закрутки равна освещенности активной поверхности солнечных батарей за виток при закрутке космического аппарата с другими вышеописанными параметрами закрутки.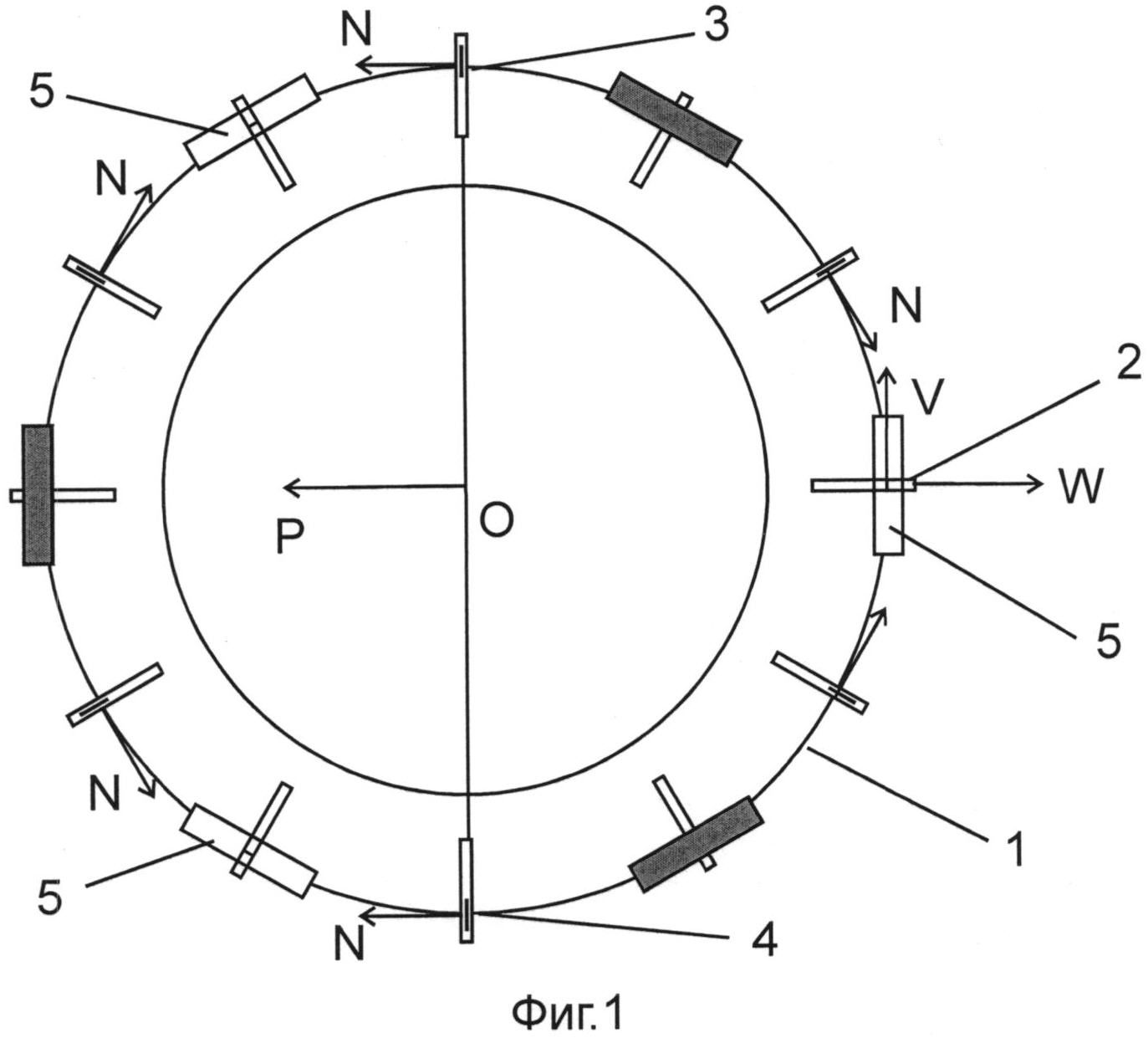
Способ подвода газообразного вещества в полость герметизируемого агрегата с ее герметизацией и фиксирующее устройство герметизируемого агрегата
Энергоустановка с электрохимическим генератором на основе водородно-кислородных топливных элементов и способ ее эксплуатации
Способ термостатирования объектов ракеты-носителя и бортовая система для его реализации
Способ управления движением космического аппарата вокруг центра масс при поддержании ориентации
Центробежное рабочее колесо и способ его изготовления
Космическая головная часть
Способ определения магнитной помехи на космическом аппарате в полете
Устройство управления приводом постоянного тока
Способ определения трехосной ориентации космического аппарата
Способ управления кинетическим моментом космического аппарата с помощью реактивных исполнительных органов
Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Способ контроля производительности солнечной батареи космического аппарата с инерционными исполнительными органами
Способ определения орбиты космического аппарата с аппаратурой для съемки подстилающей поверхности
Способ контроля эффективности солнечной батареи космического аппарата
Способ определения орбиты космического аппарата с аппаратурой для съёмки подстилающей поверхности
Способ привязки выполненных с космического аппарата снимков земной поверхности
Способ контроля эффективности солнечной батареи космического аппарата
Способ привязки выполненных с орбитального космического аппарата снимков подстилающей поверхности
Способ управления размещенной на космическом корабле переносной аппаратурой наблюдения
Устройство управления размещенной на космическом корабле переносной аппаратурой наблюдения

