Результат интеллектуальной деятельности: СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ
Вид РИД
Изобретение
Изобретение относится к автоматическому управлению и регулированию и может быть использовано при автоматическом управлении объектами с рециклом, в которых часть получаемого готового продукта (вещества) поступает на выход объекта, а другая часть (рецикл) возвращается с запаздыванием на вход объекта. При этом регулируемое выходное воздействие объекта равно воздействию, поступающему на рецикл. В частности, к таким выходным воздействиям может относиться концентрация элементов в выходном продукте объекта управления. Количество или расход продукта в данном случае не могут относиться к указанным выходным воздействиям. Регулирование объекта осуществляется посредством взаимосвязанных управляющих воздействий по двум каналам управления с существенно различающейся динамикой.
Динамика объекта по каналам управления и преобразования внешних воздействий описывается операторной зависимостью

где Y (s) - выходное воздействие объекта;
ω(s) - приведенное к выходу объекта управления неконтролируемое возмущающее воздействие, соответствующее совокупному влиянию на выходное воздействие объекта всех его неконтролируемых внешних воздействий;
U1(s) и U2(s) - управляющие воздействия, соответственно, по первому и второму каналам управления объекта;
φo1(s), φo2(s) и φor(s) - операторы динамического преобразования воздействий без учета запаздываний в первом канале управления, во втором канале управления и в цепи рецикла объекта;
φτ1(s), φτ2(s) и φτr(s) - операторы транспортного запаздывания в первом канале управления, во втором канале управления и в цепи рецикла объекта.
При этом величина инерционности и транспортного запаздывания в первом канале управления значительно меньше, чем во втором канале управления, что позволяет регулирующими воздействиями по первому каналу компенсировать более высокочастотные составляющие возмущающих воздействий, чем по второму каналу. Однако диапазон возможных значений управляющих воздействий U1 по первому каналу, ограничен, что часто сужает возможности компенсации возмущений (сокращает ресурс регулирования) только посредством U1. Для восстановления ресурса регулирования по первому каналу необходимы изменения U2, согласованные с изменениями U1 и обеспечивающие частичную компенсацию низкочастотных составляющих возмущающих воздействий и смещение диапазона необходимых изменений U1.
Задача управления заключается в поддержании заданного значения регулируемого выходного воздействия объекта посредством взаимосвязанных управляющих воздействий по двум каналам управления с существенно различающейся динамикой.
Примерами указанного объекта могут служить технологические комплексы приготовления и циркуляции магнетитовой суспензии при обогащении рядовых углей в тяжелой среде на сепараторах или на тяжелосредных гидроциклонах. Регулируемой выходной величиной Y объекта управления в этом случае является плотность рабочей магнетитовой суспензии, получаемой в результате разбавления водой, так называемой, кондиционной магнетитовой суспензии, подаваемой из схемы приготовления суспензии на сепаратор или тяжелосредные гидроциклоны. Часть рабочей суспензии возвращается по схеме циркуляции назад в схему приготовления. Управляющее входное воздействие U1 по первому каналу управления представляет собой расход воды на разбавление кондиционной магнетитовой суспензии. Управляющее входное воздействие U2 по второму каналу управления представляет собой расход подаваемой в схему приготовления регенерированной на магнитном сепараторе магнетитовой суспензии, имеющей значительно более высокую плотность, чем плотность кондиционной суспензии.
Известна система регулирования для объектов с запаздыванием [А.с. СССР №1295365, G05B 13/00], содержащая последовательно включенные задатчик, первый блок вычитания, регулирующий блок, первый экстраполятор, первый блок задержки, второй блок вычитания, первую модель прямого канала без запаздывания и первый сумматор, подключенный своим выходом ко второму входу первого блока вычитания, последовательно включенные исполнительный блок, объект регулирования, датчик, третий блок вычитания, второй экстраполятор, вторую модель прямого канала без запаздывания, первую модель рецикла без запаздывания, последовательно включенные вторую модель рецикла без запаздывания, второй блок задержки и второй сумматор, третий блок задержки, последовательно включенные четвертый блок задержки и четвертый блок вычитания, второй вход которого подключен к выходу первого экстраполятора, а выход соединен с входом исполнительного блока и со вторым входом второго сумматора, пятый блок задержки, вход которого соединен с выходом второго сумматора, а выход соединен с входом второй модели прямого канала без запаздывания, третий сумматор, входы которого соединены с выходами второй модели рецикла без запаздывания и второго экстраполятора, а выход подключен к входу первой модели рецикла без запаздывания, выход которой соединен со вторым входом четвертого сумматора, второй вход второго блока вычитания подключен к выходу регулирующего блока.
Работает система регулирования следующим образом. Регулирующее воздействие, вырабатываемое регулирующим блоком в замкнутом через вторую модель прямого канала без запаздывания контуре, экстраполируется вторым экстраполятором. Из экстраполированного регулирующего воздействия исключается во втором блоке вычитания прогноз эффекта рецикла. Этот прогноз состоит из преобразованной во второй модели рецикла без запаздывания экстраполированной оценки неконтролируемого возмущения, получаемого на выходе первого экстраполятора, и эффекта регулирующего воздействия с выхода первой модели прямого канала без учета запаздывания. Ошибка экстраполяции регулирующего воздействия пересчитывается во второй модели прямого канала без запаздывания в приращении выходной переменной объекта и алгебраически суммируется с ней в третьем сумматоре.
Недостаток известной системы регулирования заключается в ее ограниченных функциональных возможностях, так как она работоспособна только в том случае, когда ресурс регулирования не ограничен, то есть физически реализуемы и технологически допустимы любые изменения регулирующего воздействия, которые необходимы для компенсации входных возмущающих воздействий и реализации любых изменений задающего воздействия системы.
Известна система управления [А.с. СССР №1244636, G05B 13/02, 1980], содержащая задатчик, последовательно включенные объект регулирования, датчик, первый сумматор, измеритель рассогласования, регулирующий блок, второй сумматор, экстраполятор, исполнительный механизм, выход которого подключен к входу объекта регулирования, последовательно включенные первый блок задержки, третий сумматор, четвертый сумматор, модель прямого канала, первый масштабирующий блок, второй блок задержки, выход которого подключен ко второму входу четвертого сумматора, последовательно включенные второй масштабирующий блок и третий блок задержки, выход которого соединен со вторым входом второго сумматора, выход экстраполятора подключен к входу первого блока задержки, выход второго сумматора - ко второму входу третьего сумматора, выход модели прямого канала - ко второму входу первого сумматора, выход которого соединен с входом второго масштабирующего блока, выход задатчика подключен ко второму входу измерителя рассогласования.
При работе системы управления регулирующим блоком вырабатывается в натурно-модельном контуре с моделью объекта, включающей четвертый сумматор, модель прямого канала, первый масштабирующий блок и второй блок задержки, управляющее воздействие, которое экстраполируется с помощью экстраполятора на текущий момент времени. Отрицательное влияние рецикла (положительной обратной связи в объекте) компенсируется с помощью модели рецикла, составленной из второго масштабирующего блока и второго блока задержки.
Недостаток известной системы регулирования заключается в ее ограниченных функциональных возможностях, так как она работоспособна только в том случае, когда ресурс регулирования не ограничен.
Задача изобретения - повышение функциональных возможностей системы.
Сущность изобретения состоит в том, что в систему управления, содержащую задатчик, первый исполнительный механизм, объект управления, включающий в свой состав последовательно соединенные первый блок запаздывания, блок первого канала управления, первый сумматор, блок рецикла объекта управления и второй блок запаздывания, датчик, модель объекта управления, включающую последовательно соединенные блок модели рецикла объекта управления и первый блок задержки, последовательно соединенные второй блок задержки, второй сумматор, первый блок вычитания, первый блок модели первого канала управления, третий сумматор, второй блок вычитания, регулирующий блок, третий блок вычитания и первый экстраполятор, причем выход второго блока запаздывания соединен со вторым входом первого сумматора, а выход датчика соединен с входом блока модели рецикла объекта управления и со вторым входом третьего сумматора, второй вход первого блока вычитания подключен к выходу регулирующего блока, второй вход второго блока вычитания соединен с выходом задатчика, выход первого исполнительного механизма и вход второго блока задержки соединены между собой и с входом первого блока запаздывания, введены последовательно соединенные второй исполнительный механизм, третий блок запаздывания и блок второго канала управления, последовательно соединенные первый блок обратной модели первого канала управления и третий блок задержки, последовательно соединенные второй блок модели первого канала управления, блок обратной модели второго канала управления, последовательно соединенные четвертый блок задержки, блок модели второго канала управления и второй блок обратной модели первого канала управления, последовательно соединенные второй экстраполятор, пятый блок задержки и четвертый блок вычитания, второй вход которого подключен к выходу первого экстраполятора, а выход соединен с входом первого исполнительного механизма, вход второго исполнительного механизма соединен с выходом блока обратной модели второго канала управления, вход четвертого блока задержки подключен к входу второго исполнительного механизма, вход второго экстраполятора соединен с выходом третьего блока вычитания, а выход второго экстраполятора соединен с входом второго блока модели первого канала управления, вход первого блока обратной модели первого канала управления соединен с выходом первого блока задержки, выход третьего блока задержки соединен со вторым входом второго сумматора и со вторым входом третьего блока вычитания, а выход второго блока обратной модели первого канала управления подключен к третьему входу второго сумматора.
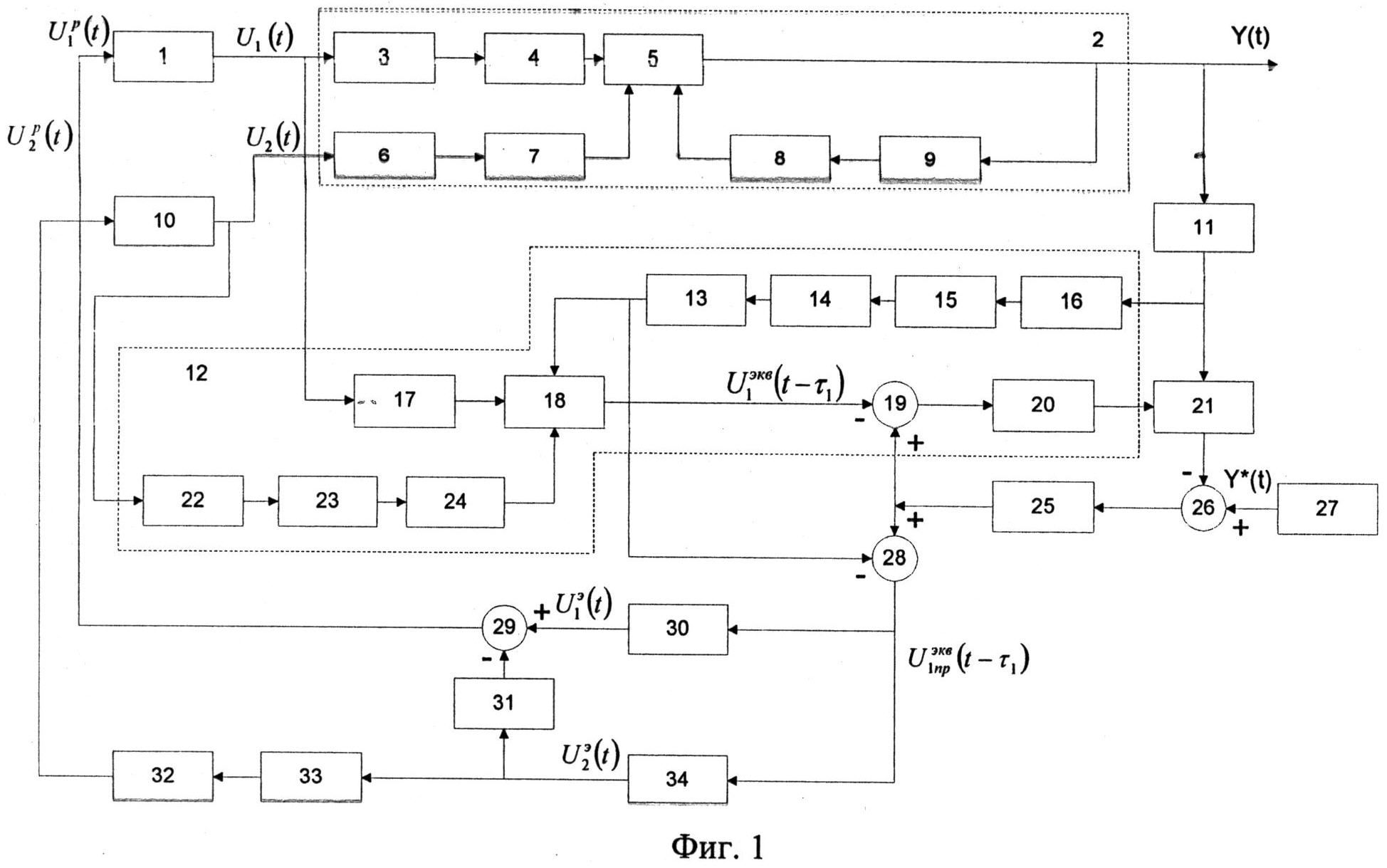
На фиг.1 представлена общая схема системы регулирования объекта с рециклом.
На фиг.2 представлены графики переходных процессов в системе под влиянием внешних ступенчатых воздействий по возмущающему входу ω(t).
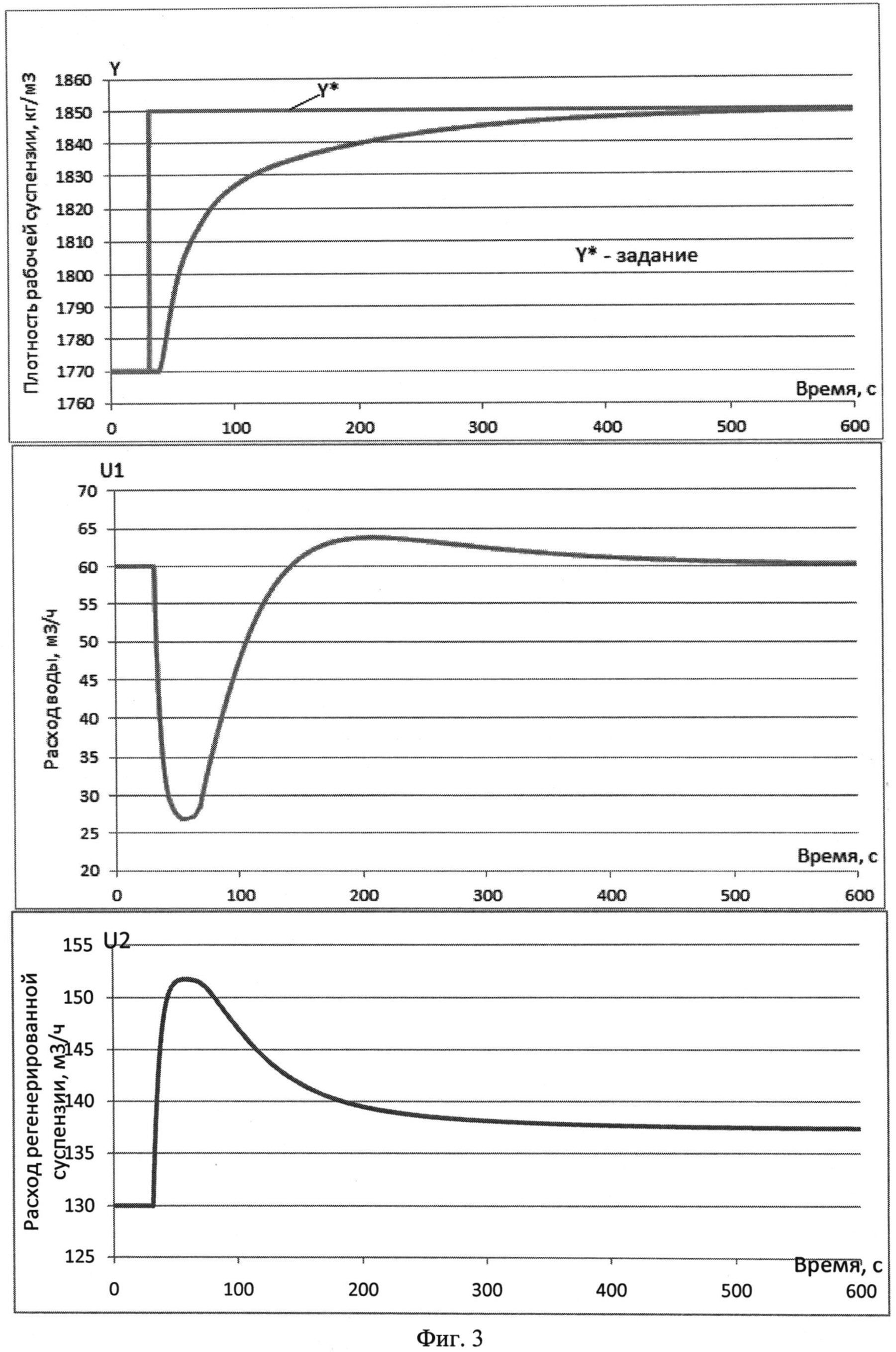
На фиг.3 представлены графики переходных процессов в системе под влиянием внешних ступенчатых воздействий по задающему входу Y*(t).
Система содержит первый исполнительный механизм 1, объект 2 управления, первый блок 3 запаздывания, блок 4 первого канала управления, первый сумматор 5,третий блок 6 запаздывания, блок 7 второго канала управления, второй блок 8 запаздывания, блок 9 рецикла объекта управления, второй исполнительный механизм 10, датчик 11, модель 12 объекта управления, третий блок 13 задержки, первый блок 14 обратной модели первого канала управления, первый блок 15 задержки, блок 16 модели рецикла объекта управления, второй блок 17 задержки, второй сумматор 18, первый блок 19 вычитания, первый блок 20 модели первого канала управления, третий сумматор 21, четвертый блок 22 задержки, блок 23 модели второго канала управления, второй блок 24 обратной модели первого канала управления, регулирующий блок 25, второй блок 26 вычитания, задатчик 27, третий блок 28 вычитания, четвертый блок 29 вычитания, первый экстраполятор 30, пятый блок 31 задержки, блок 32 обратной модели второго канала управления, второй блок 33 модели первого канала управления, второй экстраполятор 34.
Блок 16 модели рецикла объекта управления, первый 20 и второй 33 блоки модели первого канала управления и блок 23 модели второго канала управления представлены, например, в виде инерционных звеньев. Первый 14 и второй 24 блоки обратной модели первого канала управления и блок 32 обратной модели второго канала управления реализуются в виде параллельно соединенных усилительного и реального дифференцирующего звена. Первый 30 и второй 34 экстраполяторы представлены интегродифферецирующим звеном. В качестве примера первого 1 и второго 10 исполнительных механизмов может служить регулирующий клапан с электрическим приводом. Регулирующий блок 25 представляет собой, например, пропорционально-интегральный регулятор в виде параллельно соединенных интегрального и усилительного звеньев.
Предлагаемая система работает следующим образом.
В модели 12 объекта управления с использованием сигналов о фактически реализованных управляющих воздействиях по первому U1 и второму U2 каналам управления, поступающих с выходов, соответственно, первого 1 и второго 10 исполнительных механизмов, рассчитывается величина  , сигнал о которой формируется на выходе второго сумматора 18. Сигнал
, сигнал о которой формируется на выходе второго сумматора 18. Сигнал соответствует расчетной величине входного управляющего воздействия по первому каналу управления объекта, эквивалентного совокупному влиянию реализованных воздействий по первому и второму каналам управления и по цепи рецикла на текущее (в момент времени t) значение выходного воздействия объекта управления:
соответствует расчетной величине входного управляющего воздействия по первому каналу управления объекта, эквивалентного совокупному влиянию реализованных воздействий по первому и второму каналам управления и по цепи рецикла на текущее (в момент времени t) значение выходного воздействия объекта управления:

где  - оператор модели запаздывания в первом канале управления, реализуемый третьим 13 и вторым 17 блоками задержки;
- оператор модели запаздывания в первом канале управления, реализуемый третьим 13 и вторым 17 блоками задержки;
 - оператор модели запаздывания во втором канале управления, реализуемый четвертым блоком 22 задержки;
- оператор модели запаздывания во втором канале управления, реализуемый четвертым блоком 22 задержки;
 - оператор модели запаздывания в цепи рецикла объекта, реализуемый первым блоком 15 задержки;
- оператор модели запаздывания в цепи рецикла объекта, реализуемый первым блоком 15 задержки;
 - оператор модели второго канала управления без учета запаздывания, реализуемый блоком 23 модели второго канала управления;
- оператор модели второго канала управления без учета запаздывания, реализуемый блоком 23 модели второго канала управления;
 - оператор модели цепи рецикла объекта без учета запаздывания, реализуемый блоком 16 модели рецикла объекта управления; 1
- оператор модели цепи рецикла объекта без учета запаздывания, реализуемый блоком 16 модели рецикла объекта управления; 1
 - оператор обратной модели первого канала управления без учета запаздывания, реализуемый блоками 14 и 24 обратной модели первого канала управления.
- оператор обратной модели первого канала управления без учета запаздывания, реализуемый блоками 14 и 24 обратной модели первого канала управления.
В модельном контуре регулирования, состоящем из первого 19 и второго 26 блоков вычитания, первого блока 20 модели первого канала управления, третьего сумматора 21 и регулирующего блока 25, на выходе регулирующего блока 25 формируется сигнал эквивалентного управляющего входного воздействия по первому каналу управления, которое будучи реализованным в момент времени (t-τ1) обеспечило бы в текущий момент времени t равенство выходного воздействия Y (t) заданному значению Y* для объекта управления без цепи рецикла. В третьем блоке 28 вычитания из этого сигнала вычитается та часть его изменений, которая обусловлена влиянием цепи рецикла объекта управления. В результате с выхода третьего блока 28 вычитания на входы первого 30 и второго 34 экстраполяторов поступает сигнал  приведенного эквивалентного управляющего входного воздействия по первому каналу управления, которое представляет собой ретроспективную, запаздывающую на время τ1 оценку идеального управляющего воздействия, обеспечивающего полную компенсацию приведенного неконтролируемого возмущения ω(t) в текущий момент времени, то есть:
приведенного эквивалентного управляющего входного воздействия по первому каналу управления, которое представляет собой ретроспективную, запаздывающую на время τ1 оценку идеального управляющего воздействия, обеспечивающего полную компенсацию приведенного неконтролируемого возмущения ω(t) в текущий момент времени, то есть:

В первом экстраполяторе 30 сигнал  с выхода третьего блока 28 вычитания экстраполируется на интервал времени τ1 запаздывания в первом канале управления и на выходе первого экстраполятора 30 формируется сигнал
с выхода третьего блока 28 вычитания экстраполируется на интервал времени τ1 запаздывания в первом канале управления и на выходе первого экстраполятора 30 формируется сигнал  . Во втором экстраполяторе 34 сигнал
экстраполируется на интервал времени τ2 запаздывания во втором канале управления и на выходе второго экстраполятора 34 формируется сигнал
. Во втором экстраполяторе 34 сигнал
экстраполируется на интервал времени τ2 запаздывания во втором канале управления и на выходе второго экстраполятора 34 формируется сигнал  . Поскольку запаздывание τ2 значительно больше запаздывания τ1, то во втором экстраполяторе 34 осуществляется экстраполяция существенно более низкочастотных составляющих сигнала
, чем в первом экстраполяторе 30.
. Поскольку запаздывание τ2 значительно больше запаздывания τ1, то во втором экстраполяторе 34 осуществляется экстраполяция существенно более низкочастотных составляющих сигнала
, чем в первом экстраполяторе 30.
Сигнал  c выхода второго экстраполятора 34, проходя через последовательно соединенные блок 33 модели первого канала управления и блок 32 обратной модели второго канала управления, пересчитывается в масштаб входного управляющего воздействия по второму каналу управления
c выхода второго экстраполятора 34, проходя через последовательно соединенные блок 33 модели первого канала управления и блок 32 обратной модели второго канала управления, пересчитывается в масштаб входного управляющего воздействия по второму каналу управления  и поступает для реализации на вход второго исполнительного механизма 10, реализующего входное управляющее воздействие U2(t) второго канала управления. Одновременно сигнал
и поступает для реализации на вход второго исполнительного механизма 10, реализующего входное управляющее воздействие U2(t) второго канала управления. Одновременно сигнал  поступает на пятый блок 31 задержки, где осуществляется задержка сигнала на интервал времени (τ2-τ1). Сигнал
поступает на пятый блок 31 задержки, где осуществляется задержка сигнала на интервал времени (τ2-τ1). Сигнал  с выхода пятого блока 31 задержки в четвертом блоке 29 вычитания вычитается из сигнала
с выхода пятого блока 31 задержки в четвертом блоке 29 вычитания вычитается из сигнала  , поступающего с выхода первого экстраполятора 30. Получаемый при этом сигнал входного управляющего воздействия по первому каналу управления
, поступающего с выхода первого экстраполятора 30. Получаемый при этом сигнал входного управляющего воздействия по первому каналу управления

с выхода четвертого блока 29 вычитания поступает на вход первого исполнительного механизма 1, реализующего входное управляющее воздействие U1(t) первого канала управления.
Таким образом, путем одновременного изменения управляющих входных воздействий второго и первого каналов управления обеспечивается реализация в текущий момент времени экстраполированного на интервал τ1 эквивалентного управляющего воздействия  . При этом низкочастотные составляющие приведенного неконтролируемого возмущения компенсируются управляющими воздействиями по второму каналу управления. На долю управлений по первому каналу остается компенсация отклонений приведенного неконтролируемого возмущения от низкочастотных составляющих, компенсируемых изменениями управляющих воздействий по второму каналу управления.
. При этом низкочастотные составляющие приведенного неконтролируемого возмущения компенсируются управляющими воздействиями по второму каналу управления. На долю управлений по первому каналу остается компенсация отклонений приведенного неконтролируемого возмущения от низкочастотных составляющих, компенсируемых изменениями управляющих воздействий по второму каналу управления.
В результате в предлагаемой системе достижимая точность регулирования при компенсации приведенного неконтролируемого возмущения ω(t) определяется свойствами этого возмущения и величиной запаздывания τ1 в первом канале управления. В то же время, благодаря компенсации низкочастотных составляющих приведенного неконтролируемого возмущения управляющими воздействиями по второму каналу управления, система всегда располагает ресурсом управления по первому каналу, необходимым для компенсации более высокочастотных составляющих приведенного неконтролируемого возмущения.
Приведенное выше описание работы предлагаемой системы регулирования иллюстрируется ниже результатами испытаний системы автоматического регулирования плотности магнетитовой суспензии при обогащении рядового угля на тяжелосредных гидроциклонах. Регулируемой выходной величиной Y объекта управления является плотность рабочей магнетитовой суспензии, измеряемая в кг/м3. Рабочая магнетитовая суспензия получается в результате разбавления водой кондиционной магнетитовой суспензии, подаваемой из схемы приготовления суспензии на тяжелосредные гидроциклоны. Часть рабочей суспензии возвращается по схеме циркуляции назад в схему приготовления. Управляющее входное воздействие U1 по первому каналу управления представляет собой расход в м3/час воды на разбавление кондиционной магнетитовой суспензии. Управляющее входное воздействие U2 по второму каналу управления представляет собой расход в м3/час регенерированной на магнитном сепараторе магнетитовой суспензии, добавляемой в схему приготовления кондиционной суспензии.
Испытания системы автоматического регулирования плотности магнетитовой суспензии проводились при следующих условиях:
1) общее представление динамики объекта по каналам управления и преобразования внешних воздействий соответствует рассмотренной выше формуле (1);
2) операторы динамического преобразования входных воздействий в первом канале управления, во втором канале управления и в цепи рецикла объекта имеют вид

при численных значениях коэффициентов:

To1=10,0 c; To2=80,0 c; Tor=80,0 с; τ1=7,0 с; τ2=40,0 с; τr=20,0 с;
3) регулирующим блоком реализуется стандартный пропорционально-интегральный регулятор.
Работа системы иллюстрируется графиками переходных процессов под влиянием внешних ступенчатых воздействий по возмущающему входу ω(t) (фиг.2) и по задающему входу Y*(t) (фиг.3). На этих графиках видно, что под влиянием внешнего воздействия в системе одновременно формируются регулирующие воздействия по первому и второму каналам управления (изменяются управляющие воздействия U1 и U2 относительно своих начальных значений). При этом в начальный момент изменения каждого из управляющих воздействий в отдельности обеспечивает компенсацию воздействия по возмущающему входу ω(t) (графики фиг.2), а также реализацию изменений задающего воздействия Y*(t) (графики фиг.3). На начальном участке переходного процесса на изменения выходного воздействия объекта управления влияет только регулирующее воздействие по первому управлению U1, изменение величины которого относительно начального значения достаточно для компенсации возмущения ω(t) (или реализации изменения задающего воздействия Y*(t)). Через интервал времени (τ2-τ1) абсолютная величина регулирующего воздействия по первому каналу начинает уменьшаться с учетом уже реализованных регулирующих воздействий по второму каналу управления. По окончании переходного процесса в системе величина управляющего воздействия U2 устанавливается на новом уровне, отклоняясь от начального значения на величину, необходимую для компенсации возмущения ω(t) (или реализации изменения задающего воздействия Y*(t)). Абсолютная величина регулирующего воздействия по первому каналу уменьшается до нуля (величина U1 выходит на начальный уровень). Таким образом, происходит восстановление ресурса регулирования по первому каналу управления, имеющему наименьшее запаздывание.
Система регулирования объекта с рециклом, содержащая задатчик, первый исполнительный механизм, объект управления, включающий в свой состав последовательно соединенные первый блок запаздывания, блок первого канала управления, первый сумматор, блок рецикла объекта управления и второй блок запаздывания, датчик, модель объекта управления, включающую последовательно соединенные блок модели рецикла объекта управления и первый блок задержки, последовательно соединенные второй блок задержки, второй сумматор, первый блок вычитания, первый блок модели первого канала управления, третий сумматор, второй блок вычитания, регулирующий блок, третий блок вычитания и первый экстраполятор, причем выход второго блока запаздывания соединен со вторым входом первого сумматора, вход датчика подключен к выходу первого сумматора, а выход датчика соединен с входом блока модели рецикла объекта управления и со вторым входом третьего сумматора, второй вход первого блока вычитания подключен к выходу регулирующего блока, второй вход второго блока вычитания соединен с выходом задатчика, выход первого исполнительного механизма и вход второго блока задержки соединены между собой и с входом первого блока запаздывания, отличающаяся тем, что дополнительно содержит последовательно соединенные второй исполнительный механизм, третий блок запаздывания и блок второго канала управления, подключенный своим выходом к третьему входу первого сумматора, последовательно соединенные первый блок обратной модели первого канала управления и третий блок задержки, последовательно соединенные второй блок модели первого канала управления, блок обратной модели второго канала управления, последовательно соединенные четвертый блок задержки, блок модели второго канала управления и второй блок обратной модели первого канала управления, последовательно соединенные второй экстраполятор, пятый блок задержки и четвертый блок вычитания, второй вход которого подключен к выходу первого экстраполятора, а выход соединен с входом первого исполнительного механизма, вход второго исполнительного механизма соединен с выходом блока обратной модели второго канала управления, вход четвертого блока задержки подключен к входу второго исполнительного механизма, вход второго экстраполятора соединен с выходом третьего блока вычитания, а выход второго экстраполятора соединен с входом второго блока модели первого канала управления, вход первого блока обратной модели первого канала управления соединен с выходом первого блока задержки, выход третьего блока задержки соединен со вторым входом второго сумматора и со вторым входом третьего блока вычитания, а выход второго блока обратной модели первого канала управления подключен к третьему входу второго сумматора.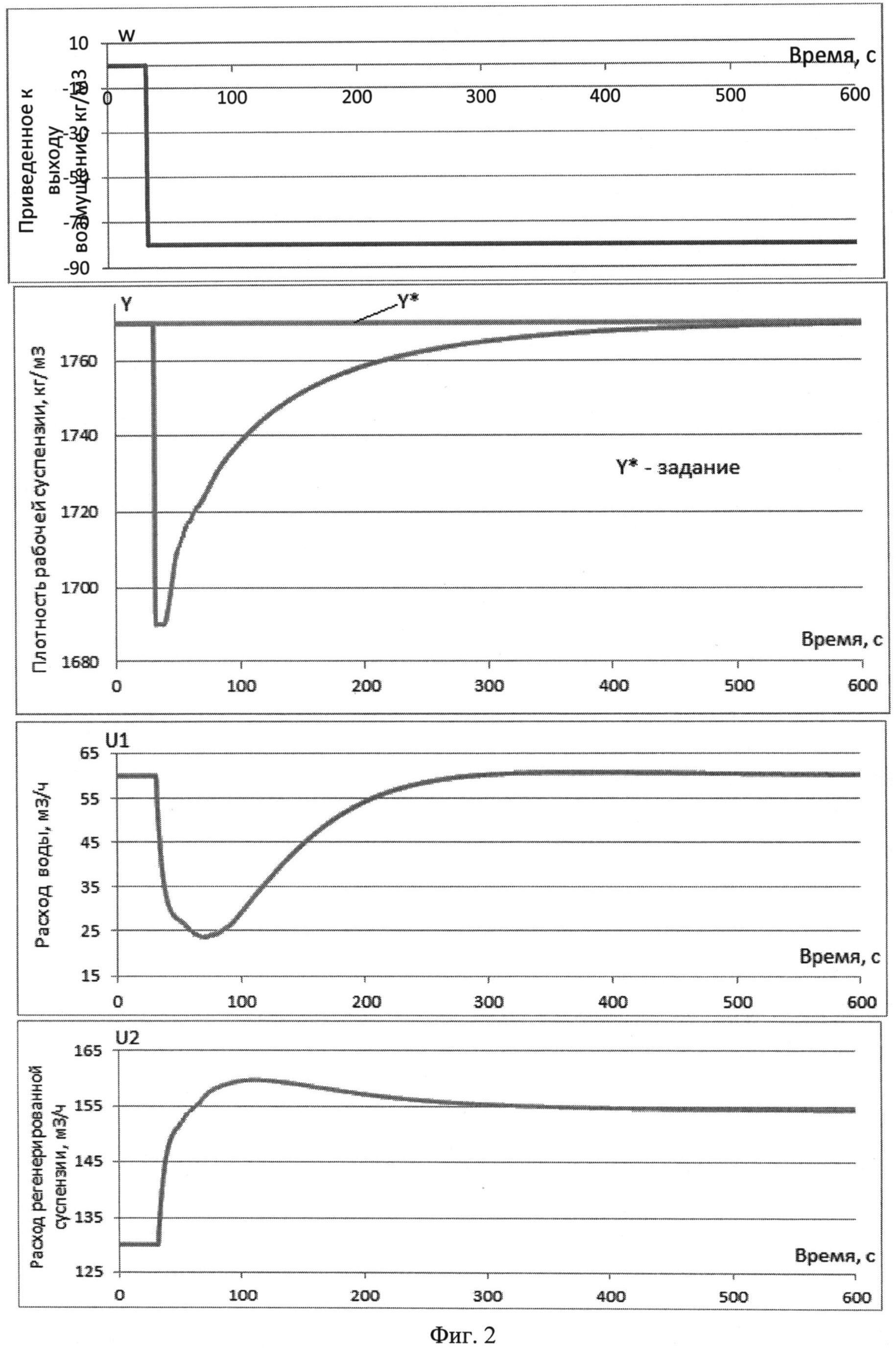
Газовая плоскопламенная горелка со встроенным радиационным рекуператором
Самоустанавливающаяся пятисателлитная планетарная передача
Способ нанесения электроэрозионностойких покрытий на основе молибдена, меди и никеля на медные электрические контакты
Способ нанесения электроэрозионностойких покрытий на основе хрома, карбидов хрома и меди на медные электрические контакты
Шихта порошковой проволоки
Флюс-добавка
Флюс для сварки и наплавки
Флюс-добавка
Упорный подшипник жидкостного трения с регистрацией режимов его работы
Способ термообработки окатышей
Способ нанесения износостойких покрытий на основе диборида титана и никеля на стальные поверхности
Однорядный планетарный редуктор
Способ нанесения износостойких покрытий на основе диборида титана и молибдена на стальные поверхности
Самоустанавливающаяся четырёхсателлитная планетарная передача
Способ химического обогащения полиметаллических марганецсодержащих руд
Трёхзвенное кинематическое соединение (трекс) с восьмью относительными движениями
Рекуперирующий электропривод переменного тока с двухзвенным преобразователем частоты
Пространственный механизм с четырёхподвижным приводом
Пространственный четырёхзвенный винто-рычажный механизм
Самоустанавливающийся шатун

