Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ СИНХРОННОЙ МАШИНОЙ С ПОСТОЯННЫМИ МАГНИТАМИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области управления синхронными машинами с постоянными магнитами (MSAP).
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Синхронная машина с постоянными магнитами (MSAP) содержит статор и ротор. Как правило, статор содержит обмотки, соединенные звездой, и ротор содержит постоянные магниты.
Обычно, MSAP получает питание от инвертора, который позволяет снизить уровень пульсации токов и момента машины.
MSAP имеет повышенный крутящий момент и очень незначительную инерцию. Кроме того, она имеет относительно небольшие катушки индуктивности, что приводит к быстрым реакциям токов и, следовательно, момента.
Таким образом, предпочтительно использовать MSAP для оборудования приводов большой мощности и высокой производительности, в частности, в бортовых системах летательного аппарата.
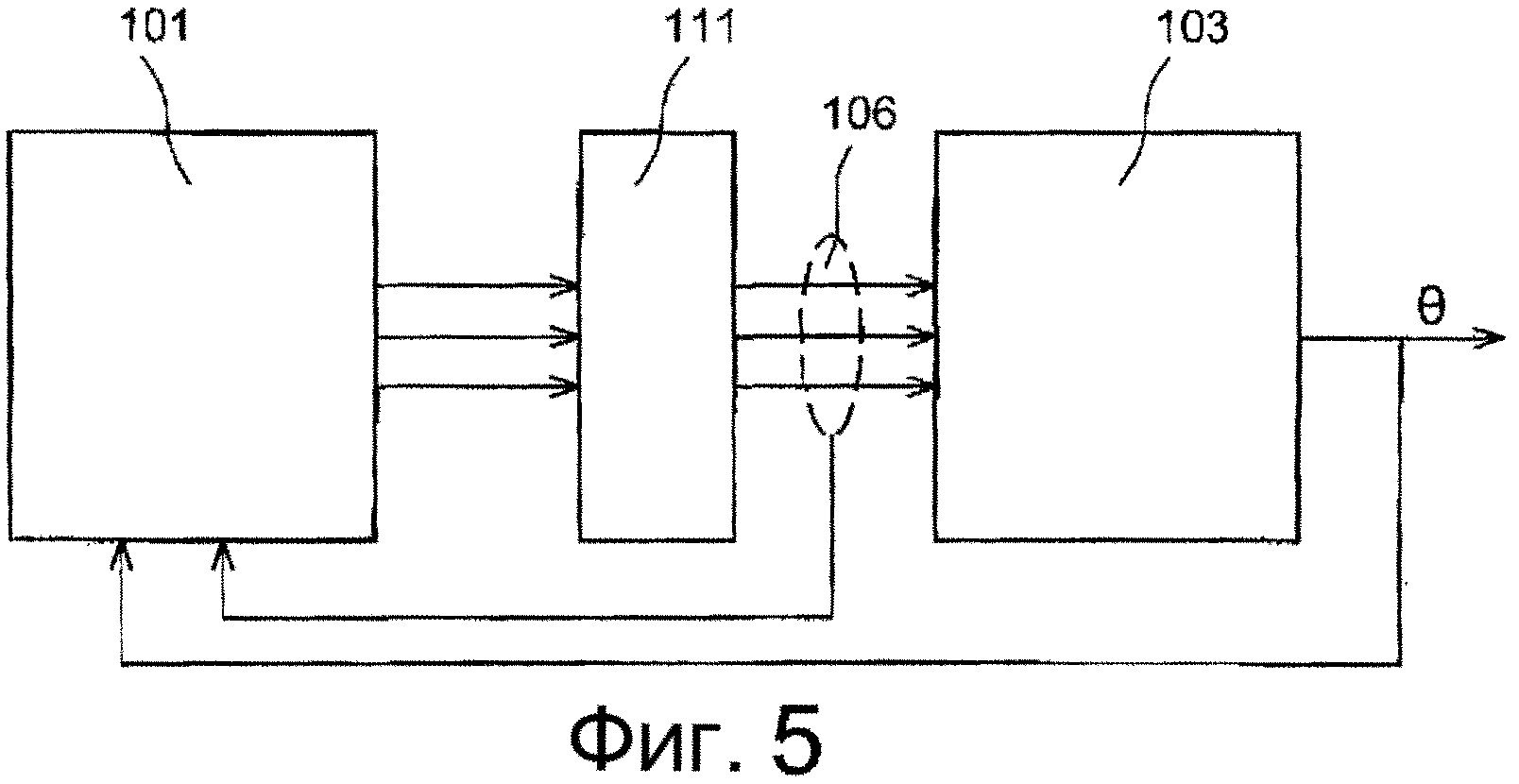
На фиг. 5 схематично показана система, содержащая устройство 101 управления, инвертор 111 и MSAP 103.
Инвертор 111 питает MSAP 103 постоянным напряжением. Он позволяет подавать на контакты MSAP 103 напряжение с амплитудой и частотой, регулируемыми устройством 101 управления.
Устройство 101 управления выполнено с возможностью векторного управления напряжениями инвертора 111 в зависимости от обратных электрических данных 106 и, в первую очередь, от точной информации о положении θ ротора. Обычно эта информация поступает от датчика положения или скорости, установленного на валу машины.
Однако существуют также устройства бездатчикового управления MSAP (см., например, публикацию Babak Nahid-Mobarakeh et al. под названием «Анализ сходимости законов бездатчикового управления MSAP, основанных на оценке ЭДС», Revue Internationale de Génie Electrique, Article Vol6/5-6-2003- pp547-577 -doi:10.3166/rige.6.545.577).
Следует отметить, что настоящее описание в части устройства бездатчикового управления в основном отталкивается от вышеуказанной публикации Babak Nahid-Mobarakeh et al.
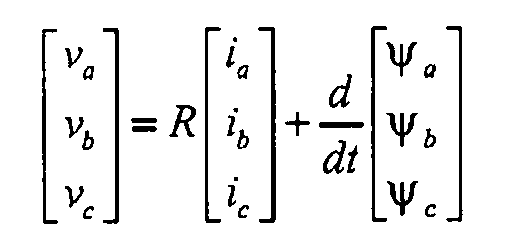
Как правило, электрические уравнения MSAP в неподвижной системе координат, связанной со статором, представлены следующим образом:
 ,
,
где v a , v b , v c обозначают напряжения фаз статора, R обозначает сопротивление фаз статора, i a , i b , i c обозначают токи фаз статора, и ψa, ψb, ψc обозначают потоки, проходящие через статорные обмотки.
MSAP можно также очень просто смоделировать во вращающейся системе координат, связанной с ротором.
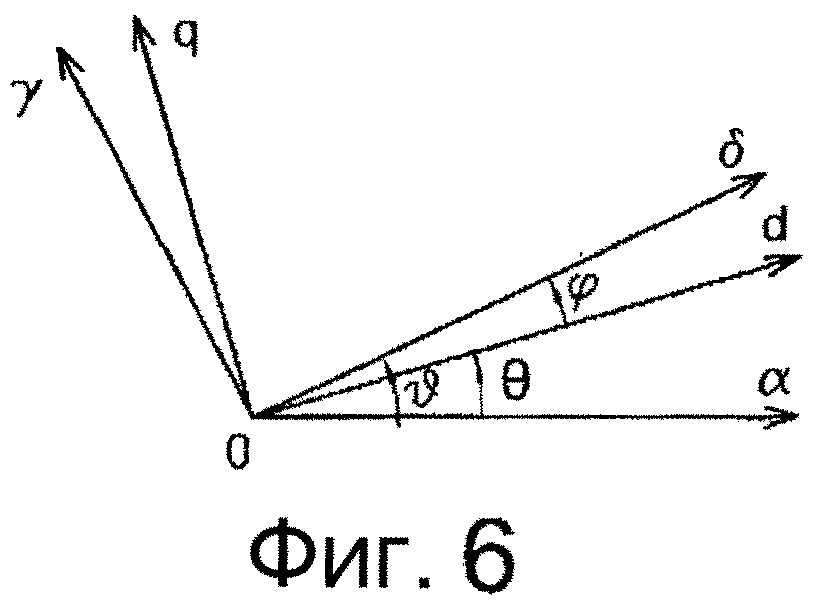
На фиг. 6 показана вращающаяся система координат d-q, связанная с ротором (называемая системой координат Парка), содержащая прямую ось Od и квадратурную ось Oq. Прямая ось Od образует угол θ относительно неподвижной оси Оα, связанной со статором. В частности, угол θ обозначает положение ротора, отмеченное его осью возбуждения Od.
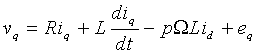
Применив преобразование согласования Т32 и преобразование Парка к вышеуказанной системе уравнений, электрические уравнения в системе координат Парка d-q можно выразить следующим образом:

 ,
,
где v d , v q и i d , i q являются прямыми и квадратурными составляющими напряжения и тока, L является индуктивностью статора, Ω обозначает скорость вращения ротора (то есть угловая скорость системы координат d-q, р обозначает число полюсов постоянных магнитов ротора, и e d , e q обозначают составляющие электродвижущей силы «ЭДС» в системе координат d-q, определенные следующими уравнениями:
e d = 0
e q = pΩψS ,
где ψS является потоком, создаваемым магнитами в прямой эквивалентной схеме.
Учитывая, что положение θ ротора и угловая скорость Ω не измерены, система координат d-q не может быть локализована, и составляющие электрических величин в этой системе координат неизвестны.
Обычно, чтобы решить эту проблему, определяют оценочную вращающуюся систему координат δ-γ, в которой известны положение υ и скорость Ωс. Ось Оδ оценочной системы координат δ-γ образует угол υ относительно неподвижной оси Оα и угол φ относительно оси Od. Угол φ показывает смещение между осями Оδ и Od.
Задача бездатчикового векторного управления состоит в определении угловой скорости Ωс таким образом, чтобы исключить отклонение положения φ между υ и θ.
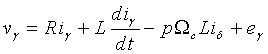
Электрические уравнения MSAP в оценочной системе координат δ-γ можно записать следующим образом:

 ,
,
где v δ, v γ и i δ, i γ являются составляющими напряжения и тока в системе координат δ-γ, Ωс является угловой скоростью системы координат δ-γ, и е δ, е γ являются составляющими ЭДС в системе координат δ-γ, определенными следующими отношениями:
е δ = pψSΩsinφ
е γ = pψSΩcosφ
Как правило, чтобы осуществлять бездатчиковое управление MSAP, оценивают составляющие е δ, е γ ЭДС в оценочной вращающейся системе координат δ-γ. Если последняя совпадает с системой координат d-q, связанной с ротором, прямая составляющая ЭДС в оценочной вращающейся системе координат становится нулевой. Это дает критерий, позволяющий корректировать положение υ и скорость Ωс оценочной вращающейся системы координат δ-γ, чтобы синхронизировать ее с системой координат d-q, связанной с ротором. После этого положение и скорость ротора выводят непосредственно из положения и скорости оценочной вращающейся системы координат δ-γ.
Таким образом, проблема бездатчикового векторного управления сводится к определению закона управления, описывающего угловую скорость Ωс и составляющие статорных напряжений v δ, v γ в системе координат δ-γ, который обеспечивает установку φ на ноль, и составляющие токов i δ, i γ по их контрольным значениям i δref, i γref, определяемым контрольным моментом Гref.
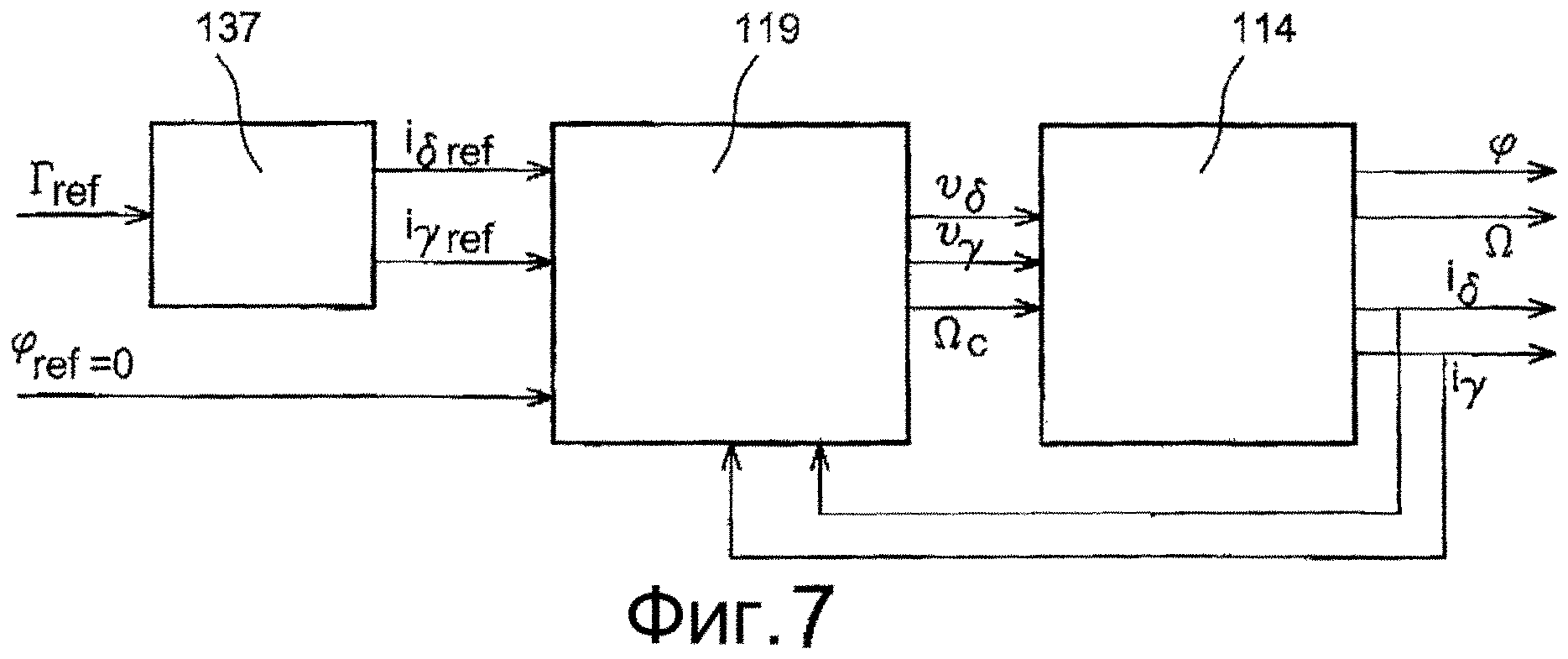
На фиг. 7 схематично показано устройство бездатчикового управления.
Это устройство управления содержит преобразователь 137 крутящего момента в токи, средства 119 векторного управления и модель системы 114 инвертор-MSAP в системе координат δ-γ.
Преобразователь 137 реализует переход крутящего момента в ток посредством преобразования значения опорного момента (или заданного момента) Гref в соответствующие контрольные токи i δref, i γref в системе координат δ-γ.
Средства 119 векторного управления определяют закон управления, чтобы управлять системой 114 инвертор-MSAP с обеспечением регулирования φ к нулю (φref = 0). Этот закон управления определяет угловую скорость Ωс и составляющие статорных напряжений v δ, v γ в системе координат δ-γ в зависимости от составляющих токов i δ, i γ, полученных на основании измерений обратных токов, и опорные токи i δref, i γref.
Устройство бездатчикового управления является, в частности, надежным, так как содержит на один элемент обнаружения меньше. Таким образом, устройство бездатчикового управления является простым в выполнении и может иметь более продолжительный срок службы, чем устройство управления с датчиком.
Вместе с тем, как правило, датчик положения является очень точным, и, следовательно, устройство управления с использованием датчика может регулировать напряжения инвертора, питающего MSAP, с более высокой точностью, чем устройство бездатчикового управления.
Таким образом, настоящее изобретение призвано предложить устройство управления MSAP, отличающееся оптимальной надежностью и очень высокой безопасностью, являющихся основополагающими критериями в авиации.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Объектом настоящего изобретения является устройство управления синхронной машиной с постоянными магнитами «MSAP», содержащей статор и ротор и питаемой от инвертора, при этом устройство управления содержит:
- датчик для получения измерения θm положения ротора,
- средства контроля, предназначенные для контроля рабочей точки MSAP в зависимости от положения ротора и от заданных параметров,
- средства оценки, предназначенные для определения оценки  положения ротора в оценочной системе координат Парка δ-γ, связанной с ротором, при этом упомянутые средства оценки содержат средства коррекции для приведения упомянутого оцененного положения
положения ротора в оценочной системе координат Парка δ-γ, связанной с ротором, при этом упомянутые средства оценки содержат средства коррекции для приведения упомянутого оцененного положения  ротора в соответствие с упомянутым измеренным положением θm ротора,
ротора в соответствие с упомянутым измеренным положением θm ротора,
- детектор неисправности для обнаружения неисправности упомянутого датчика, и
- переключатель, выполненный с возможностью подключения средств контроля к датчику, чтобы средства контроля получали измеренное положение θm ротора, пока детектор неисправности не сигнализирует о какой-либо неисправности упомянутого датчика, и в противном случае - с возможностью подключения средств контроля к средствам оценки, чтобы средства контроля получали оцененное положение ротора, когда детектор неисправности сигнализирует о неисправности упомянутого датчика.
Это позволяет повысить возможность использования MSAP в аварийном режиме и одновременно обеспечивать нормальную работу машины в случае неисправности датчика. Следует отметить, что это устройство способствует управлению MSAP с измерением, осуществляемым датчиком, и переходит к бездатчиковому управлению, только когда обнаруживается неисправность датчика, позволяя при этом избегать большого отклонения между двумя положениями в момент, когда происходит переход от управления с датчиком к бездатчиковому управлению.
Предпочтительно средства оценки содержат:
- схему оценки электродвижущей силы, предназначенную для оценки составляющих  электродвижущей силы (ЭДС) в оценочной системе координат δ-γ Парка в зависимости от величин, определяемых в упомянутой системе координат Парка, содержащих составляющие токов i
δ, i
γ, полученные на основании измерений статорных токов, составляющие статорных напряжений v
δ, v
γ, соответствующих заданным напряжениям инвертора, и скорости вращения Ωс ротора,
электродвижущей силы (ЭДС) в оценочной системе координат δ-γ Парка в зависимости от величин, определяемых в упомянутой системе координат Парка, содержащих составляющие токов i
δ, i
γ, полученные на основании измерений статорных токов, составляющие статорных напряжений v
δ, v
γ, соответствующих заданным напряжениям инвертора, и скорости вращения Ωс ротора,
- схему оценки скорости, использующую упомянутые оцененные составляющие  ЭДС, поступающие из схемы оценки электродвижущей силы, и использующую схему нелинейной коррекции для определения скорости вращения Ωс согласно закону управления, имеющему общую область сходимости, содержащую единственную точку асимптотически стабильного равновесия, соответствующую заданной рабочей точке MSAP,
ЭДС, поступающие из схемы оценки электродвижущей силы, и использующую схему нелинейной коррекции для определения скорости вращения Ωс согласно закону управления, имеющему общую область сходимости, содержащую единственную точку асимптотически стабильного равновесия, соответствующую заданной рабочей точке MSAP,
- интегратор, использующий скорость вращения Ωс, поступающую от схемы оценки скорости, для вычисления упомянутой оценки положения ротора.
Таким образом, устройство управления в соответствии с изобретением позволяет управлять MSAP в случае неисправности датчика по закону управления с общей областью сходимости, которая ограничивает схождение к одной искомой рабочей точке при любом положении ротора относительно статора.
Согласно варианту выполнения изобретения, упомянутая схема оценки скорости содержит первую схему оценки, выполненную с возможностью определения предварительной оценки  скорости вращения в зависимости от оцененной составляющей
скорости вращения в зависимости от оцененной составляющей  ЭДС, связанной с осью γ, и заранее определенного физического параметра К∫, зависящего от характеристик постоянных магнитов ротора, по следующей формуле:
ЭДС, связанной с осью γ, и заранее определенного физического параметра К∫, зависящего от характеристик постоянных магнитов ротора, по следующей формуле:
 ,
,
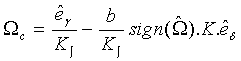
при этом схема нелинейной коррекции выполнена с возможностью регулирования скорости вращения посредством введения поправки к упомянутому оцененному значению скорости вращения по следующей формуле:
 ,
,
где b является заранее определенным рабочим параметром,  является знаком упомянутого оцененного значения скорости вращения,
является знаком упомянутого оцененного значения скорости вращения,  является ЭДС, связанной с осью δ, и где К является нелинейным показателем, который зависит от знака ЭДС , связанной с осью δ, и от заранее определенного коэффициента ξ, согласно следующей формуле и следующим условиям:
является ЭДС, связанной с осью δ, и где К является нелинейным показателем, который зависит от знака ЭДС , связанной с осью δ, и от заранее определенного коэффициента ξ, согласно следующей формуле и следующим условиям:
 при 0<ξ<1 и
при 0<ξ<1 и  .
.
Таким образом, схема нелинейной коррекции позволяет стремиться к реальной системе координат ротора, регулируя к нулю электродвижущую силу е δ, связанную с осью δ, и делая нестабильной любую нежелательную рабочую точку. Это приводит к быстрому схождению к искомой рабочей точке, одновременно позволяя инвертировать скорость вращения.
Упомянутые средства коррекции выполнены с возможностью получения ПИ между измеренным положением θm и оцененным положением ротора.
Предпочтительно средства коррекции могут содержать средство блокировки, предназначенное для блокировки средств коррекции в случае обнаружения неисправности упомянутого датчика.
При обнаружении неисправности предпочтительно, поправку, вводимую средствами коррекции, блокируют, поскольку измеряемое положение θm ротора, скорее всего, является ошибочным.
Предпочтительно упомянутые средства оценки содержат средства инициализации, предназначенные для повторной инициализации оценки положения ротора с последней оценкой
0 положения ротора до обнаружения неисправности датчика.
Это позволяет избежать переходных колебаний и сохранять постоянным значение момента, когда переходят от управления с датчиком к бездатчиковому управлению.
Объектом изобретения является также синхронная машина с постоянными магнитами MSAP, содержащая описанное выше устройство управления.
Объектом изобретения является также привод летательного аппарата, содержащий описанную выше MSAP.
Объектом изобретения является также способ управления синхронной машиной с постоянными магнитами «MSAP», содержащей статор и ротор и питаемой инвертором, при этом способ управления содержит этапы, на которых:
- при помощи датчика измеряют положение θm ротора, и
- контролируют рабочую точку машины MSAP в зависимости от положения ротора и заданных параметров,
- определяют оценку положения ротора в оценочной системе координат δ-γ Парка, связанной с ротором,
- упомянутое оцененное положение ротора приводят в соответствие с упомянутым измеренным положением θm ротора,
- обнаруживают неисправность упомянутого датчика, и
- контролируют рабочую точку машины MSAP в зависимости от измеренного положения θm ротора, пока датчик исправен, и в противном случае контролируют рабочую точку машины MSAP в зависимости от оцененного положения ротора, когда датчик неисправен.
Кроме того, способ управления дополнительно содержит этапы, на которых:
- производят оценку составляющих электродвижущей силы ЭДС в оценочной системе координат δ-γ Парка в зависимости от величин, определяемых в упомянутой системе координат Парка, содержащих составляющие токов i
δ, i
γ, полученные на основании измерений статорных токов, составляющие статорных напряжений v
δ, v
γ, соответствующих заданным напряжениям инвертора, и скорости вращения Ωс ротора,
- производят оценку скорости вращения Ωс в зависимости от упомянутых оцененных составляющих ЭДС и с использованием схемы нелинейной коррекции согласно закону управления, имеющему общую область сходимости, содержащую единственную точку асимптотически стабильного равновесия, соответствующую заданной рабочей точке MSAP,
- вычисляют упомянутую оценку положения ротора в зависимости от скорости вращения Ωс.
Способ управления дополнительно содержит этапы, на которых:
- определяют предварительную оценку скорости вращения в зависимости от оцененной составляющей  ЭДС, связанной с осью γ, и от заранее определенного физического параметра К∫, зависящего от характеристик постоянных магнитов ротора, по следующей формуле:
ЭДС, связанной с осью γ, и от заранее определенного физического параметра К∫, зависящего от характеристик постоянных магнитов ротора, по следующей формуле:  ,
,
- регулируют скорость вращения посредством введения поправки в упомянутое оцененное значение скорости вращения по следующей формуле:
,
где b является заранее определенным рабочим параметром, является знаком упомянутого оцененного значения скорости вращения, является ЭДС, связанной с осью δ, и где К является нелинейным показателем, который зависит от знака ЭДС , связанной с осью δ, и от заранее определенного коэффициента ξ, согласно следующее формуле и следующим условиям:
при 0<ξ<1 и .
Объектом изобретения является также компьютерная программа, содержащая команды для осуществления описанного выше способа управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг. 1 изображает схему устройства управления синхронной машиной с постоянными магнитами MSAP в соответствии с изобретением.
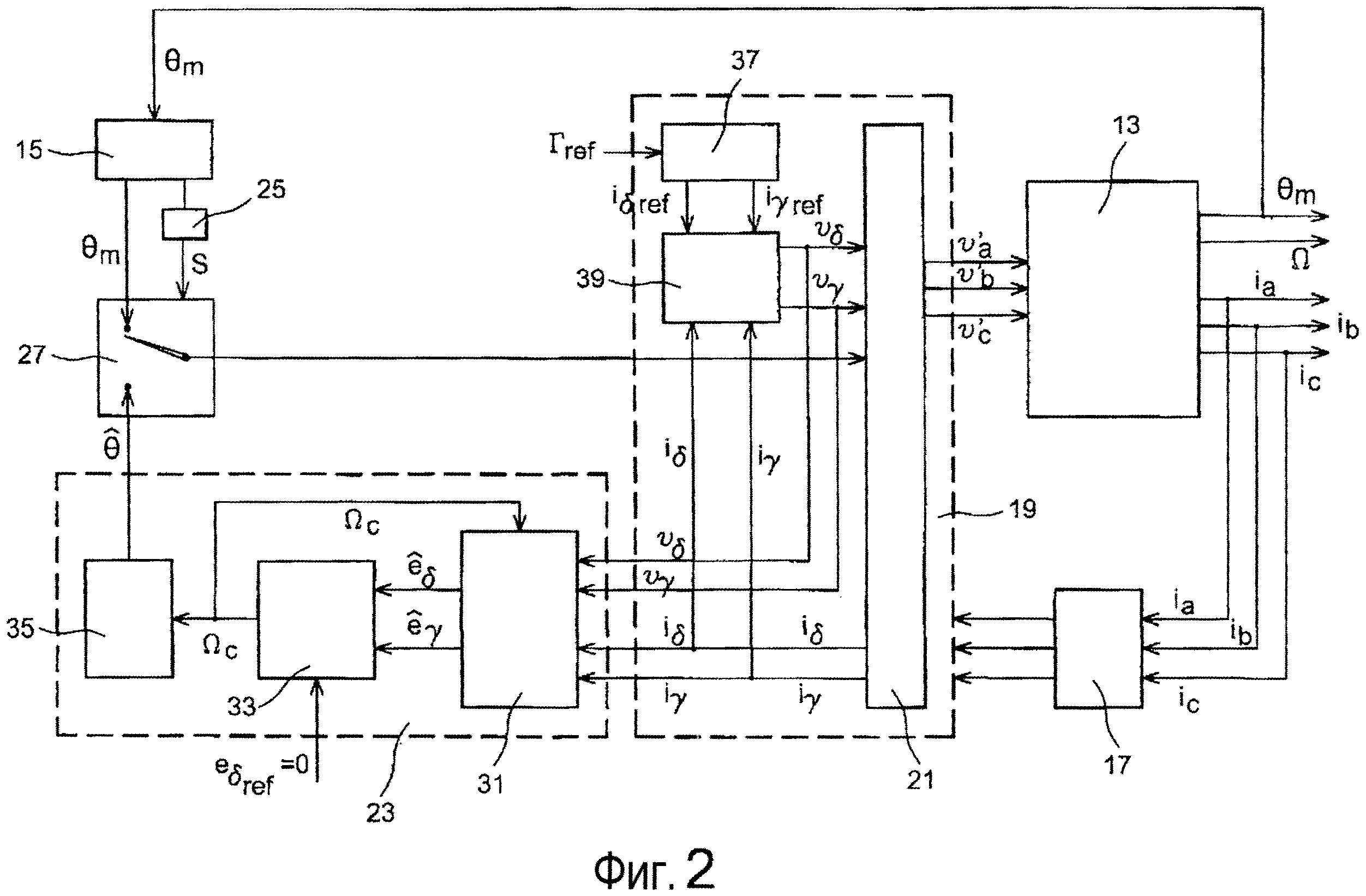
Фиг. 2 изображает схему варианта выполнения устройства управления, показанного на фиг. 2.
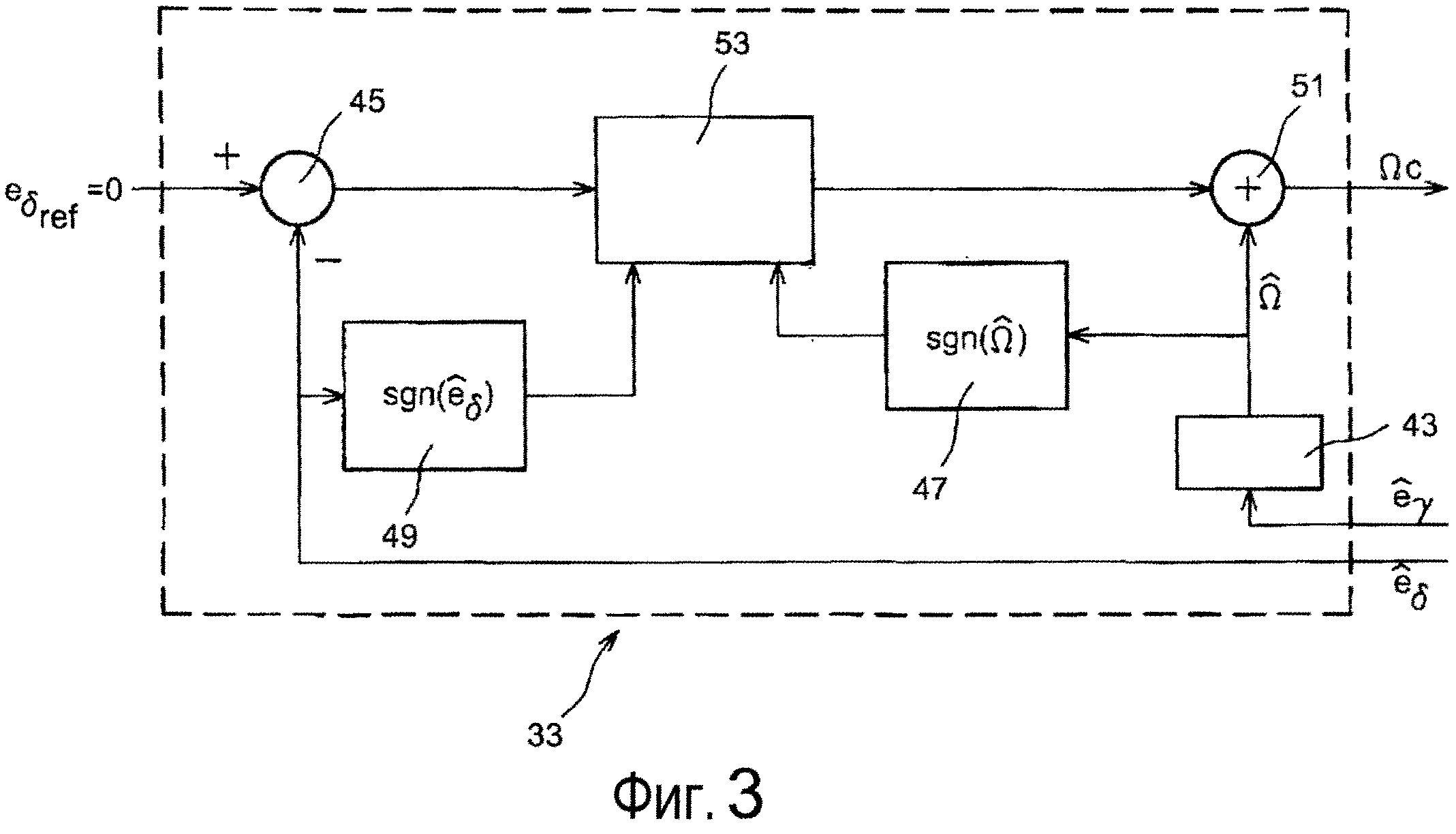
Фиг. 3 изображает схему варианта выполнения схемы оценки скорости, показанной на фиг. 2.
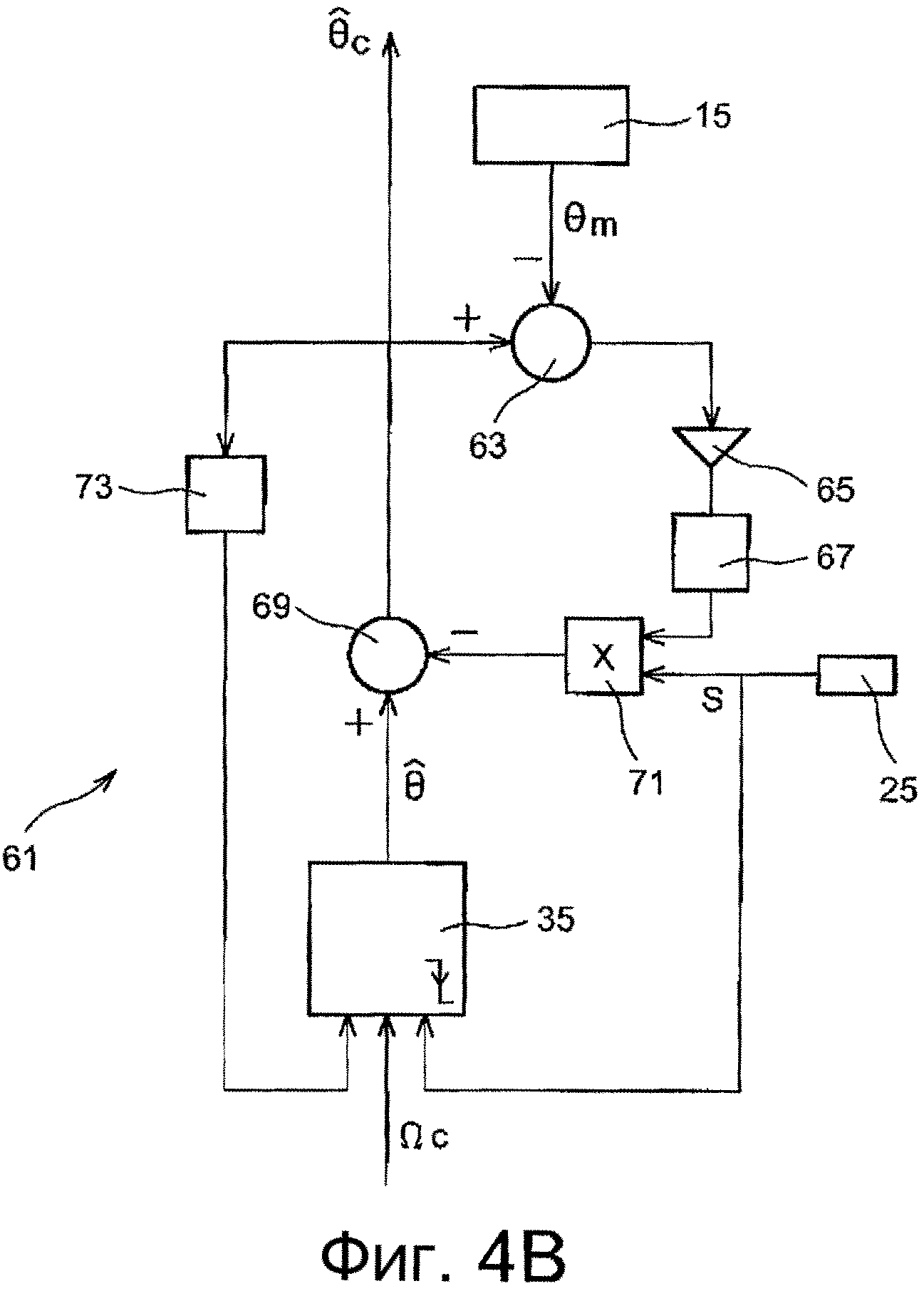
Фиг. 4А и 4В изображает схему предпочтительных вариантов воплощения средств коррекции, показанных на фиг. 1 и 2.
Фиг. 5 изображает схему известного устройства управления MSAP.
Фиг. 6 изображает систему координат Парка, связанную с ротором MSAP.
Фиг. 7 изображает схему известного устройства бездатчикового управления MSAP.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
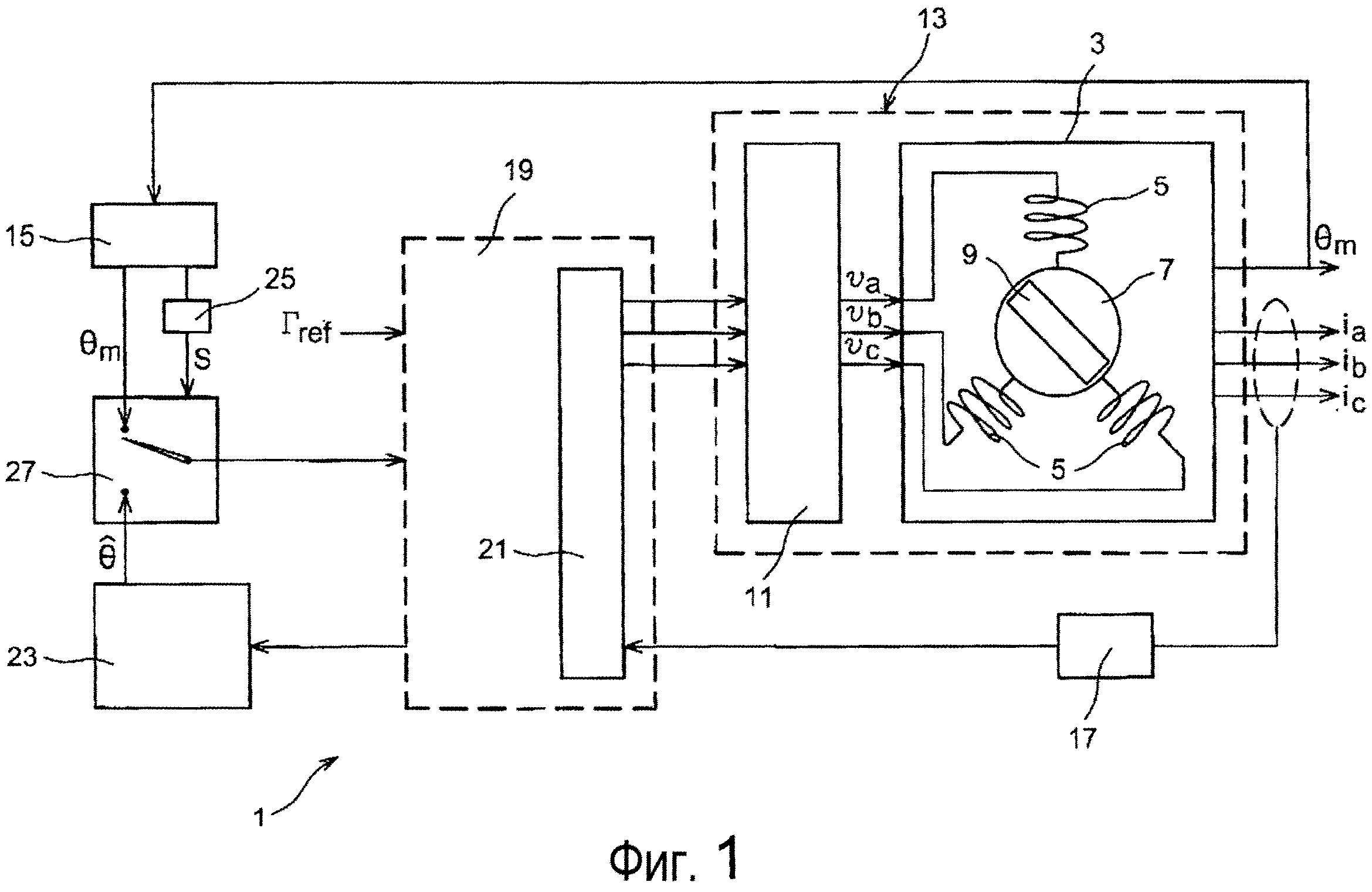
На фиг. 1 схематично показано устройство 1 управления синхронной машиной с постоянными магнитами MSAP 3, в соответствии с изобретением.
Как известно, MSAP содержит статорные обмотки 5, соединенные звездой с изолированной нейтралью, и ротор 7 с постоянными магнитами 9 симметричной конструкции с р парами полюсов (в данном случае показана только одна пара р=1).
MSAP 3 получает питание от инвертора 11, который подает напряжение v a , v b , v c на контакты статорных обмоток 5. Система инвертор-MSAP, согласно трехфазной модели, схематично показана в виде блока 13.
Устройство 1 управления содержит датчик 15 положения, средства 17 электрического измерения и средства 19 контроля.
Датчик 15 положения является резольвером (например, датчиком с эффектом Холла или любым другим типом резольвера), установленным на MSAP 3 и предназначенным для получения точного измерения θm положения ротора 7. Разумеется, положение можно также определять косвенно посредством измерения скорости вращения ротора, вместо измерения его положения. В этом случае датчик положения может содержать средства для измерения скорости вращения и интегратор для определения положения.
Средства 17 электрического измерения выполнены с возможностью измерения обратных электрических данных и, в частности, измерения статорных токов i a , i b , i c MSAP 3.
Средства 19 контроля принимают сигналы о положении ротора, сигналы о статорных токах i a , i b , i c, измеряемых средствами 17 электрического измерения, и данные об опорном моменте Гref и/или об опорной скорости вращении Ωref.
Средства 19 контроля содержат интерфейс 21 преобразования между трехфазной моделью системы инвертор-MSAP 3 и двухфазной моделью в системе координат Парка. Это преобразование позволяет трансформировать физические величины трехфазной модели в двухфазную модель и наоборот, в зависимости от положения ротора 7.
Таким образом, средства 19 контроля могут управлять или контролировать рабочую точку MSAP 3 (то есть требуемую рабочую точку или задаваемую опорным моментом Гref и/или опорной скоростью вращения Ωref) в зависимости от положения ротора 9, от заданных параметров (Гref и/или Ωref), а также от обратных электрических данных.
В соответствии с изобретением, устройство 1 управления дополнительно содержит средства 23 оценки, детектор 25 неисправности и переходный переключатель 27.
Средства 23 оценки выполнены с возможностью определения оценки положения ротора 7 в оценочной системе координат δ-γ Парка. Как будет показано более подробно со ссылками на фиг. 2, эту оценку можно произвести посредством коррекции положения υ оценочной вращающейся системы координат δ-γ, чтобы синхронизировать ее с системой координат d-q, связанной с ротором (см. также фиг. 6).
Детектор 25 неисправности выполнен с возможностью обнаружения возможной неисправности датчика 15. В частности, детектор 25 неисправности может представлять собой, например, сигнал неисправности, который генерирует или выдает сам датчик 15, когда он оказывается неисправным.
Переключатель 27 выполнен с возможностью подключения средств 19 контроля либо к средствам 23 оценки, либо к датчику 15 положения в зависимости от того, указывает ли сигнал S неисправности на то, что датчик 15 неисправен или исправен.
В частности, пока детектор неисправности не сигнализирует о какой-либо неисправности датчика 15 положения, переключатель 27 сохраняет соединение между средствами 19 контроля и датчиком 15 положения, чтобы средства 19 контроля могли получать измеряемое положение θm ротора. Если же детектор неисправности указывает, что датчик 15 положения вышел из строя, переключатель 27 подключает средства 19 контроля к средствам 23 оценки, чтобы средства 19 контроля получали оцененное положение ротора 7.
Таким образом, как только датчик 27 выходит из строя, переключатель 27 позволяет осуществить переход от управления с датчиком к бездатчиковому управлению MSAP 3. Это позволяет повысить возможность использования MSAP 3 в аварийном режиме. Разумеется, сразу после устранения неисправности датчика 15 положения управление MSAP 3 можно опять осуществлять с датчиком 15 положения.
Следует отметить, что фиг. 1, а также фиг. 2-4В иллюстрируют также основные этапы способа управления в соответствии с изобретением.
На фиг. 2 представлен вариант выполнения устройства управления, показанного на фиг. 1.
На этой схеме видно, что средства 23 оценки содержат схему 31 оценки электродвижущей силы, схему 33 оценку скорости и интегратор 35. Кроме того, средства 19 контроля содержат преобразователь 37 крутящего момента в ток и регулятор 39 тока, а также интерфейс 21 преобразования.
Преобразователь 37 момент-ток трансформирует значение опорного момента Гref в соответствующие опорные токи i δref, i γref в оценочной системе координат Парка δ-γ.
Кроме того, интерфейс 21 преобразования преобразует статорные токи i a , i b , i c, измеряемые средствами 17 электрического измерения, в составляющие токов i δ, i γ в системе координат δ-γ Парка.
Кроме того, регулятор 39 тока получает опорные токи i δref, i γref от преобразователя 37 момент-ток и составляющие токов i δ, i γ в системе координат δ-γ от интерфейса 21 преобразования для определения составляющих статорных напряжений v δ, v γ в системе координат δ-γ, соответствующих заданным напряжениям инвертора 11. Интерфейс 21 преобразования принимает эти составляющие статорных напряжений v δ, v γ по двухфазной модели и преобразует их в заданные напряжения v' a , v' b , v' c инвертора 11 по трехфазной модели.
Векторное бездатчиковое управление состоит в оценке угловой скорости Ωс таким образом, чтобы исключить отклонение положения φ между υ и θ (см. фиг. 6). Иначе говоря, необходимо получать угловую скорость Ωс на основании закона управления, гарантирующего регулирование погрешности положения φ к нулю (по модулю 2π).
Однако, зная, что составляющая е δ ЭДС по оси δ стремится к нулю, когда φ стремится к нулю (e δ=pψ∫ Ωsinφ), регулирование к нулю погрешности положения φ можно заменить регулированием к нулю е δ.
Эта оценка состоит в решении следующих электрических уравнений в оценочной системе координат δ-γ:

 .
.
Следовательно, схема 31 оценки электродвижущей силы получает составляющие токов i
δ, i
γ от интерфейса 21 преобразования, составляющие статорных напряжений v
δ, v
γ от регулятора 39 тока и скорость вращения Ωс ротора от схемы 33 оценки скорости, чтобы в зависимости от этих величин произвести оценку составляющих  ЭДС в оценочной системе координат δ-γ.
ЭДС в оценочной системе координат δ-γ.
Скорость вращения Ωс ротора оценивают циклично при помощи схемы 33 оценки скорости в зависимости от оценок  ЭДС, определенных схемой 31 оценки электродвижущей силы, и с установкой, составляющей
ЭДС, определенных схемой 31 оценки электродвижущей силы, и с установкой, составляющей  на ноль. Разумеется, скорость вращения Ωс ротора инициализируют по заранее определенному исходному значению Ωс0.
на ноль. Разумеется, скорость вращения Ωс ротора инициализируют по заранее определенному исходному значению Ωс0.
Предпочтительно схема 31 оценки скорости использует схему нелинейной коррекции для определения скорости вращения Ωс по закону управления с общей областью сходимости, содержащей единственную точку асимптотически устойчивого равновесия по принципу Ляпунова. Эта точка равновесия соответствует заданной рабочей точке MSAP 3.
На фиг. 3 показан вариант выполнения схемы 33 оценки скорости.
Согласно этому примеру, функционально схема 33 оценки скорости содержит первую схему 43 оценки скорости, компаратор 45, первый и второй индикаторы знака 47 и 49, сумматор 51 и схему 53 нелинейной коррекции.
Компаратор 45 предназначен для сравнения составляющей с ее опорной составляющей e
δref=0. Первая схема 43 оценки скорости предназначена для определения предварительной оценки  скорости вращения в зависимости от оцененной составляющей
скорости вращения в зависимости от оцененной составляющей  . Первый индикатор знака 47 предназначен для указания знака предварительной оценки скорости вращения с предположением, что
. Первый индикатор знака 47 предназначен для указания знака предварительной оценки скорости вращения с предположением, что  , где Ωref является заданной скоростью вращения. Второй индикатор знака 49 предназначен для указания знака составляющей . Схема 53 нелинейной коррекции предназначена для введения нелинейных поправок, чтобы дестабилизировать любую точку схождения к любому нежелательному решению. Наконец, сумматор 51 предназначен для сложения нелинейных членов с предварительной оценкой скорости для определения скорости вращения Ωс.
, где Ωref является заданной скоростью вращения. Второй индикатор знака 49 предназначен для указания знака составляющей . Схема 53 нелинейной коррекции предназначена для введения нелинейных поправок, чтобы дестабилизировать любую точку схождения к любому нежелательному решению. Наконец, сумматор 51 предназначен для сложения нелинейных членов с предварительной оценкой скорости для определения скорости вращения Ωс.
Первая схема 43 оценки вычисляет частное от деления между составляющей  , связанной с осью γ, и заранее определенным физическим параметром К∫, зависящим от характеристик постоянных магнитов ротора, по следующей формуле:
, связанной с осью γ, и заранее определенным физическим параметром К∫, зависящим от характеристик постоянных магнитов ротора, по следующей формуле:
 при К∫
= рψ∫.
при К∫
= рψ∫.
Согласно частному варианту выполнения, схема 53 нелинейной коррекции вводит поправку в зависимости от знака предварительной оценки скорости вращения, от заранее определенного рабочего параметра b, от физического параметра К∫, от составляющей ЭДС, связанной с осью δ, и, наконец, от нелинейного показателя, который зависит от знака составляющей и от заранее определенного коэффициента ξ по следующей формуле:
 и .
и .
После этого сумматор 51 добавляет вышеуказанную поправку к предварительной оценке скорости по следующей формуле:
.
Следует отметить, что, анализируя стабильность закона управления, выраженного скоростью вращения Ωс по вышеуказанной формуле (см. публикацию Babak Nahid-Mobarakeh et al., «Анализ сходимости законов бездатчикового управления MSAP, основанных на оценке ЭДС»), установили, что все траектории в фазовом пространстве φ-Ω сходятся к искомой точке равновесия (φ=0, Ω=Ωref) при следующих условиях:
0<ξ<1 и .
Предпочтительно, рабочий параметр b находится в пределах от 0 до 3 (0<b≤3) и предпочтительно близок к 1.
Вышеупомянутый закон управления позволяет избежать схождения любой траектории в фазовом пространстве к любой нежелательной точке равновесия за счет дестабилизации некоторых точек равновесия и за счет достаточного удаления других точек в фазовом пространстве, для их исключения. В частности, это позволяет обойти проблему отсутствия слежения, присущую электрическим уравнениям при скорости вращения, близкой к нулю.
Кроме того, зависимость поправки от знака скорости вращения позволяет траекториям в фазовом пространстве φ-Ω сходиться к искомой точке независимо от знака заданной скорости вращения Ωref, что позволяет производить инверсию скорости без какой-либо проблемы.
Таким образом, при соблюдении вышеуказанных условий и независимо от первоначальной точки координаты (π≤φ≤π, Ω=Ω0) все траектории в фазовом пространстве φ-Ω сходятся к искомой точке равновесия.
Иначе говоря, даже если при запуске первоначальная погрешность положения составляет примерно π, траектория быстро стремится к рабочей точки по заданным значениям момента и скорости вращения.
Кроме того, даже если при запуске начинают от точки при скорости вращения со знаком, противоположным заданной скорости, погрешность положения быстро стремится к нулю, что позволяет MSAP быстро набирать постоянный режим по заданным значениям момента и скорости вращения.
Сразу после определения скорости вращения схемой 33 оценки скорости интегратор 35 интегрирует скорость Ωс, поступающую от схемы 33 оценки скорости, для определения оценки положения ротора.
Кроме того, для обеспечения равномерного и точного перехода между управлением с датчиком и бездатчиковым управлением средства 23 оценки могут содержать средства для непрерывной коррекции оцененного положения ротора.
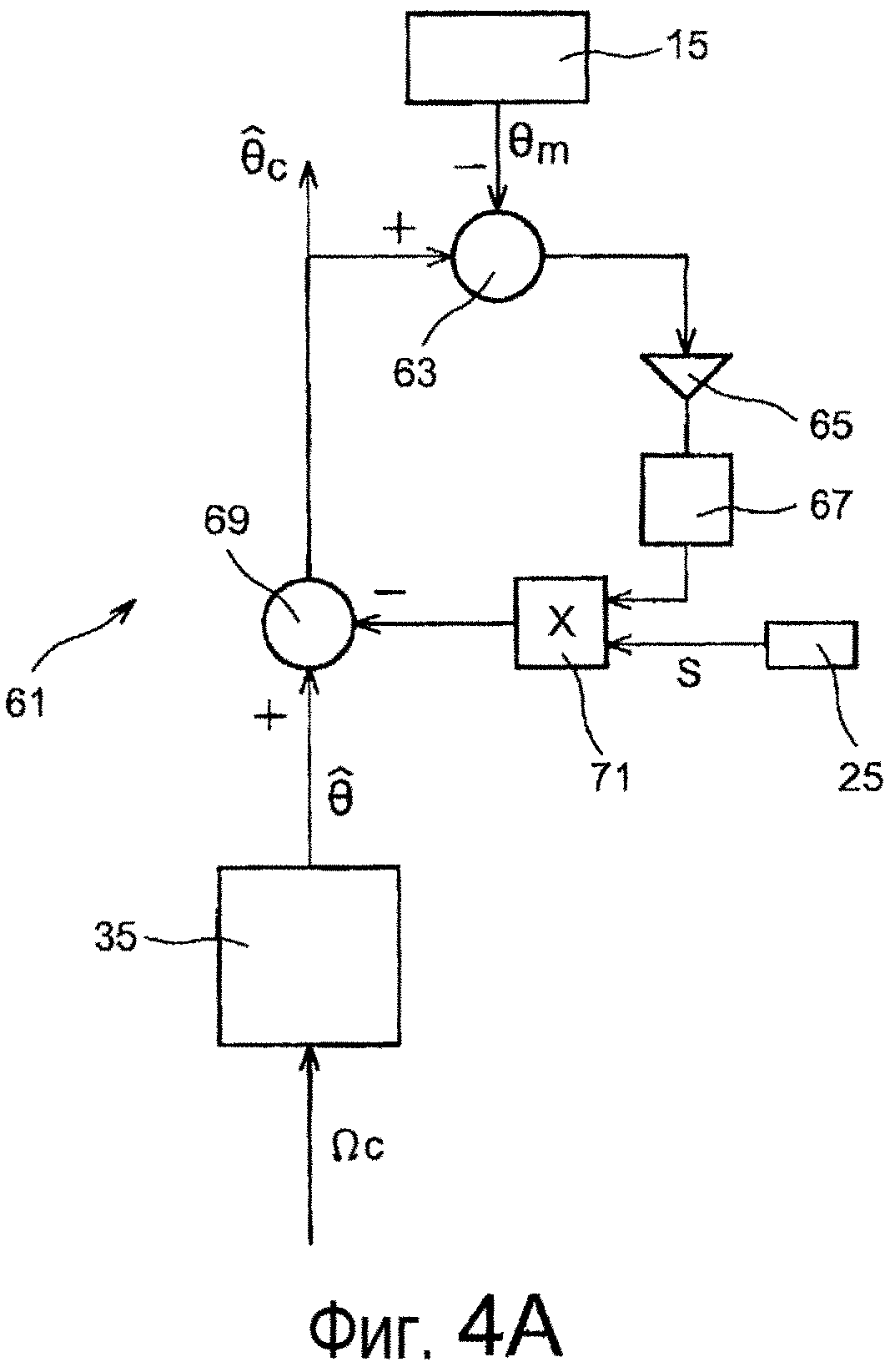
На фиг. 4А показаны средства 61 коррекции, которые могут быть включены в средства 23 оценки. Эти средства 61 коррекции выполнены с возможностью получения ПИ по разности между измеренным положением θm ротора и оценочным положением ротора, чтобы привести последнее в соответствии с измеренным положением θm ротора.
Так, средства 61 коррекции могут содержать компаратор 63 положения для непрерывного сравнения положения θm ротора, измеряемого датчиком 15 положения, с оцененным положением ротора, поступающим от интегратора 35, фильтр ПИ или умножитель усиления 65 для получения ответной реакции, чтобы интегрирование не расходилось, и дополнительный интегратор 67 для синхронизации оцененного положения ротора с измеренным положением θm ротора и второй компаратор 69 для сравнения между выходом дополнительного интегратора 67 и оцененным положением ротора с целью коррекции
с положения ротора.
Следует отметить, что сравнение и ответная реакция происходят перманентно, чтобы не давать оцененному значению положения ротора расходиться, так как во время использования датчика 15 положения оцененное значение  оказалось бы в разомкнутом контуре. Когда обнаруживается неисправность датчика 15 положения, последнее оцененное значение скорости вращения Ωс, поступившее в этот момент от схемы 33 оценки скорости, вводят в интегратор 35 в момент переключения управления.
оказалось бы в разомкнутом контуре. Когда обнаруживается неисправность датчика 15 положения, последнее оцененное значение скорости вращения Ωс, поступившее в этот момент от схемы 33 оценки скорости, вводят в интегратор 35 в момент переключения управления.
Следовательно, в момент возможного переключения между управлением с датчиком и управлением без датчика предпочтительно отклонение между последними измеренным значением θm и оцененным значением является очень незначительным.
После осуществления перехода обратная реакция больше не должна проявляться, так как значение датчика 25 положения является ошибочным.
Действительно, на фиг. 4А показано, что средства 61 коррекции содержат средство 71 блокировки, предназначенное для блокировки средств 61 коррекции, когда детектор 25 неисправности указывает на неисправность датчика 15 положения. Это средство 71 блокировки может просто содержать умножитель 71, который получает произведение между сигналом неисправности S и поправкой положения ротора, выдаваемой дополнительным интегратором 67. Таким образом, при обнаружении неисправности сигнал неисправности равен нулю (S=0) и, следовательно, выход средства 71 блокировки устанавливается на ноль, что позволяет блокировать или не учитывать последнее измеренное значение θm положения ротора. С другой стороны, пока сигнал неисправности не указывает на какую-либо неисправность датчика (S=1), средства коррекции учитывают измеряемые значения θm положения ротора.
На фиг. 4В показано, что средства 23 оценки могут дополнительно содержать средства 73 инициализации для повторной инициализации оценки положения ротора с последней оценкой
0 до обнаружения неисправности датчика 15 положения.
Средства 71 инициализации содержат запоминающее устройство для сохранения последнего значения ротора (оценочного или скорректированного
с), которое еще является нормальным.
Действительно, при обнаружении неисправности сигнал неисправности S заставляет срабатывать триггер, например, на нисходящем сигнале, в результате чего происходит повторная инициализация по последней оценке
0 положения ротора.
Таким образом, в момент переключения между управлением с датчиком и бездатчиковым управлением крутящий момент при переходном состоянии между двумя режимами управления не имеет колебаний.
Следует отметить, что различные элементы устройства управления могут содержать средства обработки или вычисления с одной или несколькими компьютерными программами, содержащими команды исполнительных кодов для применения способа управления в соответствии с изобретением, когда эти различные элементы исполняют компьютерные программы.
Следовательно, объектом изобретения является также компьютерный программный продукт, который можно применять в различных элементах устройства управления, причем этот программный продукт содержит исполнительные кодовые команды, предназначенные для осуществления описанного выше заявленного способа.
Предпочтительно систему, содержащую MSAP и устройство ее управления в соответствии с изобретением, можно использовать для моторизованных приводов в бортовых системах летательного аппарата. Например, ее можно использовать в компрессоре, системе вентиляции, реверсорах тяги, люках, а также во многих других агрегатах и узлах летательного аппарата.
Электропитание для летательного аппарата
Инвертор напряжения и способ управления таким инвертором
Способ и устройство обработки регенерированной электрической энергии летательного аппарата
Модуль преобразования напряжения между высоковольтной электрической сетью летательного аппарата и элементом накопления энергии
Стабилизация электрической сети постоянного тока
Устройство электрического питания летательного аппарата на земле
Электронное устройство с охлаждением через распределитель с жидким металлом
Печатная плата, содержащая по меньшей мере один керамический компонент
Способ соединения, эквипотенциальный соединительный элемент ответвления и сеть обратного тока с эквипотенциальным соединением в непроводящей конструкции
Упрощенный способ управления преобразователем трехфазного переменного напряжения в постоянное напряжение
Электропитание для летательного аппарата
Инвертор напряжения и способ управления таким инвертором
Способ и устройство обработки регенерированной электрической энергии летательного аппарата
Модуль преобразования напряжения между высоковольтной электрической сетью летательного аппарата и элементом накопления энергии
Стабилизация электрической сети постоянного тока
Устройство электрического питания летательного аппарата на земле
Электронное устройство с охлаждением через распределитель с жидким металлом
Печатная плата, содержащая по меньшей мере один керамический компонент
Способ соединения, эквипотенциальный соединительный элемент ответвления и сеть обратного тока с эквипотенциальным соединением в непроводящей конструкции
Упрощенный способ управления преобразователем трехфазного переменного напряжения в постоянное напряжение

