Результат интеллектуальной деятельности: СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области подводной навигации и может быть применено в системах определения и контроля местоположения подвижных подводных объектов, преимущественно маломерных, таких как подводные пловцы, водолазы, малогабаритные необитаемые подводные аппараты.
Известны гидроакустические системы подводной навигации, в которых местоположение подводного объекта определяется относительно донных маяков, стационарно устанавливаемых в точках с известными координатами, см., например, патенты РФ: [1] - RU 2084924 C1, G01S 15/08, 20.07.1997; [2] - RU 2158431 C1, G01S 15/08, 27.10.2000; [3] - RU 2451300 C1, G01S 15/08, 20.05.2012; [4] - RU 2468388 C2, G01S 15/08, 27.11.2012. Каждый из донных маяков излучает акустический сигнал на своей частоте, что обеспечивает разделение сигналов маяков и их идентификацию. Сигналы донных маяков принимаются на подводном объекте, где определяется время их прохождения от маяка к подводному объекту и на этой основе - дальность от подводного объекта до маяка. После этого решается триангуляционная задача для определения местоположения подводного объекта относительно маяков. Донные маяки могут работать либо в режиме излучения акустических сигналов в предопределенные моменты времени, либо в режиме «запрос-ответ». В первом случае аппаратура донных маяков содержит гидроакустические излучатели («пингеры»), а аппаратура подводных объектов - средства приема гидроакустических сигналов донных маяков, при этом аппаратура маяков и подводного объекта жестко синхронизирована. Во втором случае аппаратура донных маяков содержит гидроакустические приемоответчики, срабатывающие по получению сигнала запроса от подводного объекта, а подводный объект - гидроакустический приемопередатчик, осуществляющий передачу гидроакустического сигнала запроса к донным маякам и прием от них ответных сигналов. В этом случае требования по жесткой синхронизации аппаратуры маяков и подводного объекта не предъявляются.
Недостатком систем с донными маяками является сложность их развертывания и необходимость калибровки.
Этих недостатков лишены системы подводной навигации с навигационной базой из дрейфующих на поверхности маяков (радиогидроакустических буев), текущее местоположение которых определяется с помощью внешней навигационной системы, например, как это реализовано в патенте США: [5] - US 5119341, H04B 1/59, 2.06.1992, где дрейфующий маяк оснащен приемником сигналов внешней навигационной системы, в качестве которой используется глобальная навигационная спутниковая система (ГНСС) GPS. В качестве внешней навигационной системы также могут использоваться известные навигационные системы ГЛОНАСС, Loran, Omega и т.п.
Среди систем подводной навигации, использующих навигационные базы из дрейфующих маяков (радиогидроакустических буев), известны системы, в которых определение местоположения подводного объекта осуществляется на самом объекте, см., например, патент РФ: [6] - RU 2365939 C1, G01S 15/08, 27.08.2009. В этой системе каждый из дрейфующих маяков излучает гидроакустический сигнал на своей частоте, обеспечивая разделение сигналов и их идентификацию. Сигналы дрейфующих маяков несут в себе информацию о текущем местоположении маяка, определяемом по сигналам внешней навигационной системы. Сигналы дрейфующих маяков принимаются на подводном объекте, где определяется время прохождения сигнала от маяка к подводному объекту и на этой основе - дальность от подводного объекта до маяка. Далее решается известная триангуляционная задача, дающая местоположение подводного объекта относительно маяков, а также географические координаты. Аналогично рассмотренным выше системам с донными маяками дрейфующие маяки могут работать либо в режиме излучения акустических сигналов в предопределенные моменты времени, либо в режиме «запрос-ответ». В первом случае аппаратура дрейфующих маяков содержит гидроакустические излучатели («пингеры»), а аппаратура подводного объекта - средства приема гидроакустических сигналов дрейфующих маяков, при этом аппаратура маяков и подводного объекта должна быть жестко синхронизирована. Во втором случае дрейфующие маяки содержат гидроакустические приемоответчики, срабатывающие по получению сигнала запроса от подводного объекта, а подводный объект - гидроакустический приемопередатчик, осуществляющий передачу гидроакустического сигнала запроса к дрейфующим маякам и прием от них ответных сигналов. В этом случае требования по жесткой синхронизации аппаратуры маяков и подводного объекта не предъявляются.
В ряде случаев возникает задача определения местоположения подводного объекта и слежения за ним на станции контроля - сопровождающем судне или береговой станции. Примером системы, решающей эту задачу, является система, представленная в патенте [7] - RU 2437114 C1, G01S 3/80, 20.12.2011, принятая в качестве прототипа.
Система-прототип содержит группировку расположенных на водной поверхности и образующих навигационную базу радиогидроакустических буев, связанных гидроакустическими каналами с подводным объектом, аппаратура которого обеспечивает формирование и излучение гидроакустических сигналов в предопределенные моменты времени, а также станцию контроля, связанную радиоканалами с буями группировки.
Аппаратура подводного объекта содержит гидроакустический передатчик («пингер»), осуществляющий излучение гидроакустического сигнала в предопределенные моменты времени в соответствии с временными метками своей шкалы времени, синхронизированной относительно единой шкалы времени всех буев группировки.
Каждый из буев группировки содержит приемник сигналов внешней навигационной системы, например приемник сигналов ГНСС, обеспечивающий определение текущих координат местоположения буя, а также формирование меток времени бортовой шкалы времени в соответствии со шкалой времени внешней навигационной системы. В результате шкалы времени всех буев группировки синхронизированы относительно шкалы времени внешней навигационной системы, образуя единую шкалу времени всех буев группировки - единую шкалу времени системы.
Кроме этого, каждый из буев группировки содержит гидроакустическую аппаратуру, обеспечивающую возможность приема гидроакустических сигналов, поступающих с подводного объекта, а также средства, обеспечивающие возможность определения задержки распространения этих сигналов относительно моментов излучения, привязанных к определенным временным меткам (реперным точкам) единой шкалы времени системы.
Также каждый из буев группировки имеет радиомодем, предназначенный для осуществления двухсторонней связи со станцией контроля, обеспечивая прием управляющих команд и передачу данных о задержках распространения принимаемых буем гидроакустических сигналов и данных о текущем местоположении буя.
Станция контроля содержит радиомодем, предназначенный для осуществления двухсторонней связи со всеми буями группировки, а также средства, обеспечивающие возможность определения координат подводного объекта на основании получаемых данных о задержках распространения гидроакустических сигналов, принимаемых буями группировки, и данных о текущем местоположении буев.
В обобщенном виде система-прототип работает следующим образом. В выбранных зонах водной поверхности размещается группировка дрейфующих радиогидроакустических буев, образующих навигационную базу. Эти буи на основе принимаемых сигналов внешней навигационной системы определяют свое текущее местоположение, а также формируют метки времени бортовой шкалы времени в соответствии со шкалой времени внешней навигационной системы, образуя единую шкалу времени всех буев группировки (единую шкалу времени системы). Перед погружением подводного объекта его шкала времени синхронизируется в соответствии с единой шкалой времени системы. После погружения подводного объекта гидроакустический передатчик под действием аппаратуры управления начинает периодически излучать сигналы в предопределенные моменты времени, соответствующие определенным временным меткам (реперным точкам) единой шкалы времени системы. Эти сигналы принимаются на буях, где фиксируется их временное положение относительно определенных временных меток (реперных точек) бортовых шкал времени и определяется задержка распространения, содержащая в себе информацию о расстоянии до подводного объекта. Данные о задержке распространения принимаемых буем гидроакустических сигналов вместе с данными о его текущем местоположении передаются по радиоканалу на станцию контроля. Аппаратура станции контроля на основании данных, поступающих со всех буев группировки, используя триангуляционные методы, вычисляет координаты подводного объекта, которые затем отображаются с помощью средств визуализации.
Таким образом, система-прототип обеспечивает возможность определения и контроля текущего местоположения подводного объекта на станции контроля - сопровождающем судне или береговой станции. При этом не требуется точной юстировки базовых линий, поскольку координаты буев определяются с высокой точностью в любой момент времени по сигналам внешней навигационной системы. Это уменьшает погрешность определения координат подводного объекта, имеющую место в системах [1]-[4] из-за неточности установки донных маяков.
В системе-прототипе активным элементом, излучающим гидроакустический сигнал, является гидроакустический передатчик подводного объекта, а гидроакустическая аппаратура буев работает в пассивном режиме, осуществляя только прием поступающих с подводного объекта гидроакустических сигналов. Такое решение обеспечивает экономию ресурса батарей буев, однако требует наличия в аппаратуре подводного объекта средств формирования шкалы времени, синхронизированной с единой шкалой времени группировки буев, что в ряде случаев не может быть реализовано по условиям применения системы.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является создание системы определения и контроля местоположения подводного объекта, в которой задача экономии ресурса батарей буев решается в условиях отсутствия на подводном объекте средств формирования шкалы времени, синхронизированной с единой шкалой времени группировки буев.
Сущность заявляемого изобретения заключается в следующем. Система определения и контроля местоположения подводного объекта содержит группировку расположенных на водной поверхности и образующих навигационную базу радиогидроакустических буев, связанных гидроакустическими каналами с подводным объектом, аппаратура которого обеспечивает возможность излучения гидроакустических сигналов, а также станцию контроля, связанную радиоканалами с указанными буями. При этом каждый из буев группировки содержит приемник сигналов внешней навигационной системы, обеспечивающий возможность определения текущих координат своего местоположения и формирования временных меток бортовой шкалы времени в соответствии со шкалой времени внешней навигационной системы, гидроакустическую аппаратуру, обеспечивающую возможность приема информационных гидроакустических сигналов, поступающих с подводного объекта, а также средства, обеспечивающие возможность определения задержек распространения этих сигналов относительно реперных точек бортовой шкалы времени, и средства радиосвязи со станцией контроля, обеспечивающие возможность передачи на нее данных о задержках распространения принимаемых буем информационных гидроакустических сигналов и данных о текущем местоположении буя, а станция контроля содержит средства, обеспечивающие возможность определения координат подводного объекта на основании данных о задержках распространения информационных гидроакустических сигналов, принимаемых буями группировки, и данных о текущем местоположении буев. В отличие от прототипа, каждый из буев группировки выполнен с обеспечением возможности работы в активном режиме ведущего в группировке, при котором его гидроакустическая аппаратура излучает на подводный объект общий для всей группировки запросный гидроакустический сигнал, а аппаратура подводного объекта выполнена с обеспечением возможности приема этого сигнала и его переизлучения через определенный момент времени на все буи группировки, включая ведущий буй.
Сущность изобретения и возможность его осуществления поясняются чертежами, представленными на фиг. 1 и 2, где
на фиг. 1 представлена обобщенная структурная схема заявляемой системы определения и контроля местоположения подводного объекта, поясняющая состав и взаимные связи основных частей системы;
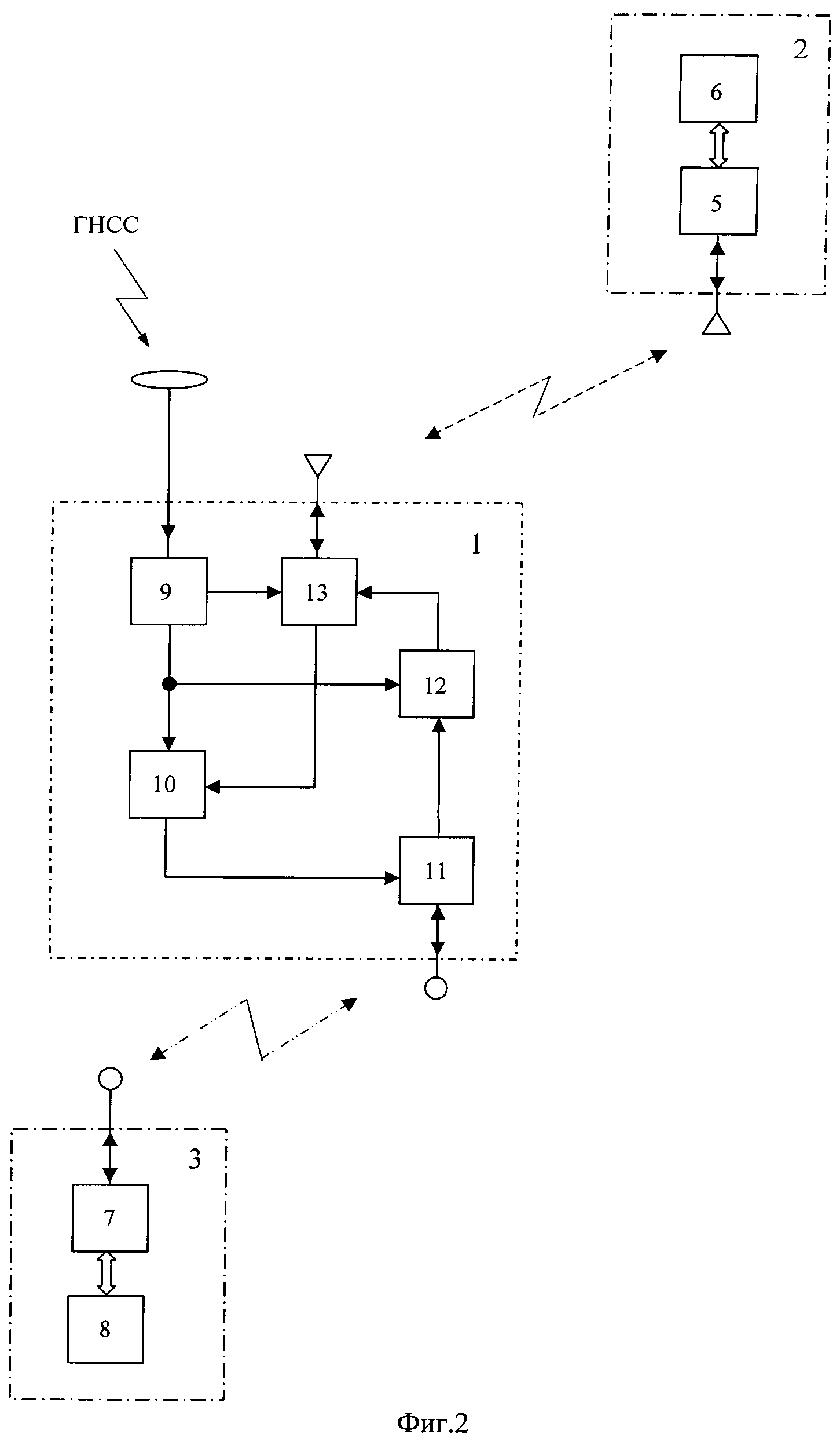
на фиг. 2 - фрагмент заявляемой системы определения и контроля местоположения подводного объекта, поясняющий состав аппаратуры подводного объекта, радиогидроакустического буя и станции контроля.
Система определения и контроля местоположения подводного объекта, см. фиг.1, содержит группировку расположенных на водной поверхности и образующих навигационную базу радиогидроакустических буев 1 (в рассматриваемом примере - четыре радиогидроакустических буя 11, 12, 13 и 14), связанных радиоканалами со станцией 2 контроля и гидроакустическими каналами - с подводным объектом 3.
Система определения и контроля местоположения подводного объекта работает с внешней навигационной системой, в качестве которой в рассматриваемом примере используется ГНСС (например, ГЛОНАСС) с группировкой навигационных спутников 4, сигналы которых принимаются буями 1 группировки (фиг. 1).
Станция 2 контроля содержит, см. фиг. 2, радиомодем 5 и связанную с ним электронно-вычислительную машину (ЭВМ) 6. Радиомодем 5 обеспечивает прием сигналов с буев 1, несущих информацию об их текущем местоположении и данные о задержках распространения принимаемых буями 1 информационных гидроакустических сигналов. Радиомодем 5 также обеспечивает передачу управляющих команд на буи 1. ЭВМ 6 обеспечивает определение координат подводного объекта 3 на основании данных о текущем местоположении буев 1 и задержках распространения принимаемых ими информационных гидроакустических сигналов, а также формирует, при необходимости, управляющие команды для управления буями 1.
Аппаратура подводного объекта 3 содержит, см. фиг. 2, гидроакустический приемоответчик 7 и связанный с ним микроконтроллер 8. Гидроакустический приемоответчик 7 обеспечивает прием запросного гидроакустического сигнала, излучаемого ведущим буем 1, работающим в активном режиме, и переизлучение этого сигнала через определенный момент времени на все буи 1 группировки, включая ведущий буй 1. Микроконтроллер 8 обеспечивает управление работой гидроакустического приемоответчика 7 в соответствии с заложенной в нем программой.
Каждый из радиогидроакустических буев 1 содержит, см. фиг. 2, приемник 9 сигналов внешней навигационной системы (в рассматриваемом случае - приемник сигналов ГНСС ГЛОНАСС), микроконтроллер 10, гидроакустический приемопередатчик 11, блок 12 определения задержки распространения принимаемого информационного гидроакустического сигнала и радиомодем 13. Навигационный выход приемника 9 сигналов внешней навигационной системы связан с первым входом радиомодема 13, а синхронизирующий выход - с опорным входом блока 12 определения задержки распространения принимаемого информационного гидроакустического сигнала и синхронизирующим входом микроконтроллера 10, выход которого связан с управляющим входом гидроакустического приемопередатчика 11. Информационный выход гидроакустического приемопередатчика 11 связан с информационным входом блока 12 определения задержки распространения принимаемого информационного гидроакустического сигнала, выход которого связан со вторым входом радиомодема 13. Приемный выход радиомодема 13 связан с управляющим входом микроконтроллера 10.
Приемник 9 сигналов внешней навигационной системы осуществляет определение текущих координат местоположения буя 1, на котором он размещен, и формирование временных меток бортовой шкалы времени в соответствии со шкалой времени внешней навигационной системы.
Микроконтроллер 10 осуществляет управление гидроакустическим приемопередатчиком 11 в процессе приема поступающих с подводного объекта 3 информационных гидроакустических сигналов, а также, в случае работы буя 1 в активном режиме, управление гидроакустическим приемопередатчиком 11 в процессе излучения запросных гидроакустических сигналов на подводный объект 3. Работа микроконтроллера 10 осуществляется в соответствии с заложенной в нем программой, а также под воздействием внешних управляющих команд, поступающих с приемного выхода радиомодема 13.
Блок 12 определения задержки распространения принимаемого информационного гидроакустического сигнала, поступающего с подводного объекта 3, определяет величину задержки этого сигнала относительно реперных точек бортовой шкалы времени.
Радиомодем 13 обеспечивает передачу на станцию 2 контроля данных о задержках распространения информационных гидроакустических сигналов, принимаемых гидроакустическим приемопередатчиком 11, и данных о текущем местоположении буя 1, определяемых приемником 9 сигналов внешней навигационной системы, а также прием управляющих команд, поступающих со станции 2 контроля.
В обобщенном виде заявляемая система работает следующим образом.
В выбранных зонах водной поверхности размещается группировка дрейфующих радиогидроакустических буев 1, образующих навигационную базу системы (в рассматриваемом примере - четыре радиогидроакустических буя 11, 12, 13 и 14). Буи 1 связаны радиоканалами со станцией 2 контроля и гидроакустическими каналами - с подводным объектом 3. Кроме этого буи 1 принимают сигналы внешней навигационной системы - в рассматриваемом примере сигналы ГНСС, поступающие с навигационных спутников 4.
Каждый из буев 1 группировки может работать в активном режиме ведущего в группировке или в пассивном режиме. В каждый момент времени в активном режиме может находиться только один буй 1, а остальные три - в пассивном режиме.
Буй 1, работающий в активном режиме ведущего в группировке, осуществляет излучение на подводный объект 3 общего для всей группировки запросного гидроакустического сигнала, а также прием поступающего с подводного объекта ответного информационного гидроакустического сигнала. Этот режим характеризуется повышенным энергопотреблением. Буи 1, работающие в пассивном режиме, осуществляют только прием информационных гидроакустических сигналов, поступающих с подводного объекта 3. Этот режим характеризуется минимальным энергопотреблением. В результате обеспечивается экономия суммарного ресурса батарей буев 1 группировки.
Режим работы буев 1 устанавливается под воздействием команд, поступающих со станции 2 контроля, и реализуется в соответствии с программами, заложенными в микроконтроллерах 10. Например, возможен алгоритм, при котором буй 1, работающий в активном режиме, продолжает свою работу до выработки бортовой батареей питания определенной части своего ресурса (фиксируемой, например, по продолжительности работы), после чего в активный режим ведущего переходит следующий буй 1. Возможен алгоритм, при котором буи 1 группировки поочередно, с заданной периодичностью, переходят в активный режим. Выбор алгоритма определяется выбранной стратегией экономии ресурса батарей буев 1 группировки и технологическими особенностями последующего восстановления этого ресурса.
В процессе работы на каждом из буев 1 группировки с помощью приемника 9 сигналов внешней навигационной системы осуществляется определение текущих координат местоположения и формирование временных меток бортовой шкалы времени в соответствии со шкалой времени внешней навигационной системы, образуя тем самым единую шкалу времени всех буев 1 группировки (единую шкалу времени системы). Снимаемые с синхронизирующего выхода приемника 9 сигналы временных меток бортовой шкалы времени поступают на опорный вход блока 12 определения задержки распространения принимаемого информационного гидроакустического сигнала, а также на синхронизирующий вход микроконтроллера 10, на управляющий вход которого поступают сигналы с приемного выхода радиомодема 13.
Под воздействием сигналов, поступающих на входы микроконтроллера 10, и в соответствии со своей внутренней программой микроконтроллер 10 формирует управляющие сигналы для гидроакустического приемопередатчика 11.
В активной фазе работы гидроакустический приемопередатчик 11 формирует и излучает на подводный объект 3 общий для всей группировки буев 1 запросный гидроакустический сигнал.
Запросный гидроакустический сигнал распространяется до подводного объекта 3 с временной задержкой, пропорциональной расстоянию между излучающим этот сигнал активным буем 1 и подводным объектом 3. На подводном объекте 3 этот сигнал принимается с помощью гидроакустического приемоответчика 7, находящегося под управлением микроконтроллера 8, и переизлучается через определенный момент времени.
Переизлученный подводным объектом 3 гидроакустический сигнал принимается всеми буями 1 группировки, включая ведущий буй. Для каждого из буев 1 этот сигнал является входным информационным сигналом, несущим в своей задержке распространения информацию о дальности до подводного объекта 3.
Прием информационного гидроакустического сигнала на каждом из буев 1, включая ведущий буй, осуществляется с помощью гидроакустического приемопередатчика 11, установленного в режим приема под воздействием управляющего сигнала, поступающего с выхода микроконтроллера 10.
Принятый приемопередатчиком 11 информационный гидроакустический сигнал преобразуется к виду, удобному для последующей обработки, и поступает на информационный вход блока 12 определения задержки распространения принимаемого информационного гидроакустического сигнала, где определяется величина задержки этого сигнала относительно реперных точек бортовой шкалы времени. При этом используются сигналы меток времени, поступающие на опорный вход блока 12 с синхронизирующего выхода приемника 9. Определяемая в блоке 12 величина задержки принимаемого информационного гидроакустического сигнала за вычетом известной временной задержки, происходящей на подводном объекте 3, пропорциональна сумме двух расстояний: расстояния между подводным объектом 3 и ведущим буем, осуществившим излучение запросного сигнала, и расстояния между подводным объектом 3 и буем, на котором принят переизлученный сигнал. В частности, для ведущего буя, осуществившего излучение запросного сигнала, определяемая задержка пропорциональна удвоенному расстоянию между ним и подводным объектом 3.
Данные о задержке распространения принимаемого информационного гидроакустического сигнала с выхода блока 12 поступают на второй вход радиомодема 13, на первый вход которого с навигационного выхода приемника 9 поступают данные о текущем местоположении буя 1. Эти данные соответствующим образом кодируются и передаются на определенной частоте по радиоканалу на станцию 2 контроля.
На станции 2 контроля сигналы, излучаемые радиомодемами 13 всех буев 1 группировки, принимаются радиомодемом 5, который осуществляет их разделение (частотное или кодовое), декодирование и преобразование к виду, удобному для обработки в ЭВМ 6.
В ЭВМ 6 на основании данных о задержках распространения принимаемых буями 1 информационных гидроакустических сигналов вычисляются расстояния Di от каждого i-го буя 1i (i=1, 2, 3, 4) до подводного объекта 3, а затем, используя данные о текущем местоположении буев 1 и вычисленные данные о расстояниях от них до подводного объекта 3, на основе триангуляционных методов вычисляются координаты подводного объекта 3, а также скорость звука в водной среде.
При вычислении координат подводного объекта 3 и скорости звука в водной среде решается система из четырех уравнений вида:

где: xбi, yбi, zбi - координаты i-го буя 1;
x, y, z - координаты подводного объекта 3;
i - номер буя 1 (i=1, 2, 3, 4);
τi - задержка распространения информационных гидроакустических сигналов;
c - скорость звука в водной среде.
Поскольку скорость звука в водной среде сильно зависит от солености, глубины и ряда других факторов, то, наряду с координатами, в уравнение (1) она входит как величина неизвестная и вычисляется при каждом сеансе определения местоположения подводного объекта 3.
Таким образом, в результате решения системы из четырех уравнений типа (1) получают искомые координаты подводного объекта 3. Эти координаты, при необходимости, отображают с помощью средств визуализации станции 2 контроля (на фиг. 1, 2 не показаны).
После проведения сеанса измерений ведущий (излучивший запросный сигнал) буй 1 либо переходит в пассивный режим (только приема сигнала с подводного объекта 3), переуступая право излучения запросного сигнала следующему бую 1 группировки, либо продолжает оставаться в активном режиме и при последующих сеансах измерения местоположения подводного объекта 3, переуступая право излучения запросного сигнала при исчерпании до определенного уровня своего энергетического ресурса, реализуя тем самым определенную стратегию экономии суммарного энергоресурса буев 1 группировки.
Таким образом, заявляемая система обеспечивает возможность определения и контроля текущего местоположения подводного объекта 3 на станции 2 контроля (сопровождающем судне или береговой станции) при экономии ресурса батарей буев 1 и отсутствии на подводном объекте 3 средств формирования шкалы времени, синхронизированной с единой шкалой времени буев 1.
Рассмотренное показывает, что заявляемое изобретение осуществимо и обеспечивает достижение технического результата, заключающегося в создании системы определения и контроля местоположения подводного объекта, в которой задача экономии ресурса батарей буев решается в условиях отсутствия на подводном объекте средств формирования шкалы времени, синхронизированной с единой шкалой времени группировки буев.
Источники информации
1. RU 2084924 C1, G01S 15/08, опубл. 20.07.1997.
2. RU 2158431 C1, G01S 15/08, опубл. 27.10.2000.
3. RU 2451300 C1, G01S 15/08, опубл. 20.05.2012.
4. RU 2468388 С2, G01S 15/08, опубл. 27.11.2012.
5. US 5119341, H04B 1/59, опубл. 2.06.1992.
6. RU 2365939 C1, G01S 15/08, опубл. 27.08.2009.
7. RU 2437114 C1, G01S 3/80, опубл. 20.12.2011.
Система определения и контроля местоположения подводного объекта, содержащая группировку расположенных на водной поверхности и образующих навигационную базу радиогидроакустических буев, связанных гидроакустическими каналами с подводным объектом, аппаратура которого обеспечивает возможность излучения гидроакустических сигналов, а также станцию контроля, связанную радиоканалами с указанными буями, при этом каждый из буев группировки содержит приемник сигналов внешней навигационной системы, обеспечивающий возможность определения текущих координат своего местоположения и формирования временных меток бортовой шкалы времени в соответствии со шкалой времени внешней навигационной системы, гидроакустическую аппаратуру, обеспечивающую возможность приема информационных гидроакустических сигналов, поступающих с подводного объекта, а также средства, обеспечивающие возможность определения задержек распространения этих сигналов относительно реперных точек бортовой шкалы времени, и средства радиосвязи со станцией контроля, обеспечивающие возможность передачи на нее данных о задержках распространения принимаемых буем информационных гидроакустических сигналов и данных о текущем местоположении буя, а станция контроля содержит средства, обеспечивающие возможность определения координат подводного объекта на основании данных о задержках распространения информационных гидроакустических сигналов, принимаемых буями группировки, и данных о текущем местоположении буев, отличающаяся тем, что каждый из буев группировки выполнен с обеспечением возможности работы в активном режиме ведущего в группировке, при котором его гидроакустическая аппаратура излучает на подводный объект общий для всей группировки запросный гидроакустический сигнал, а аппаратура подводного объекта выполнена с обеспечением возможности приема этого сигнала и его переизлучения через определенный момент времени на все буи группировки, включая ведущий буй.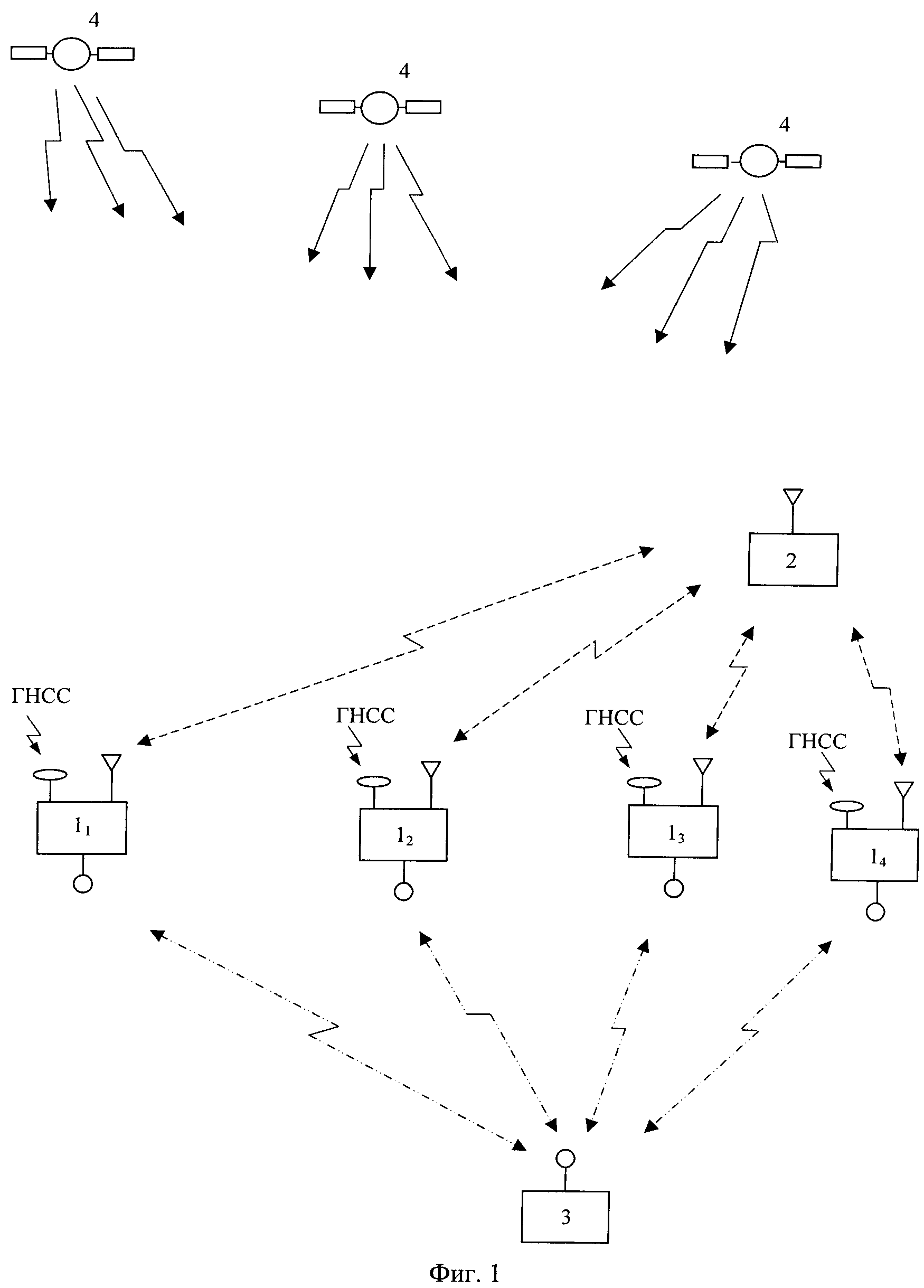
Сердечник бронебойной пули
Бронебойная пуля для стрелкового оружия
Квантовый дискриминатор на газовой ячейке
Фармацевтическая композиция, содержащая ферменты: лизоцим, пероксидазу, повиаргол и липосомы, для местного применения
Безабразивная зубная паста, содержащая фермент папаин, экстракт гарпагофитума, d,l-пирролидонкарбоксилат n-кокоил этиларгината и натрия фторид
Модуль приемника сигналов глобальных навигационных спутниковых систем
Система определения местоположения подвижного объекта по сигналам глобальных навигационных спутниковых систем
Зеемановский замедлитель атомного пучка
Зубная паста, содержащая лиофилизированную массу живых бифидобактерий
Зубная паста, содержащая смесь лизатов бактерий
Сердечник бронебойной пули
Бронебойная пуля для стрелкового оружия
Квантовый дискриминатор на газовой ячейке
Фармацевтическая композиция, содержащая ферменты: лизоцим, пероксидазу, повиаргол и липосомы, для местного применения
Безабразивная зубная паста, содержащая фермент папаин, экстракт гарпагофитума, d,l-пирролидонкарбоксилат n-кокоил этиларгината и натрия фторид
Модуль приемника сигналов глобальных навигационных спутниковых систем
Система определения местоположения подвижного объекта по сигналам глобальных навигационных спутниковых систем
Зеемановский замедлитель атомного пучка
Зубная паста, содержащая лиофилизированную массу живых бифидобактерий
Зубная паста, содержащая смесь лизатов бактерий

