Результат интеллектуальной деятельности: СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ
Вид РИД
Изобретение
Изобретение относится к области радионавигации и может быть использовано в системах определения местоположения и слежения за траекторией перемещающихся в надземном пространстве объектов по сигналам глобальных навигационных спутниковых систем (ГНСС) ГЛОНАСС, GPS и им подобным.
Известны системы определения и слежения за местоположением подвижных объектов по сигналам ГНСС, в которых текущие координаты траектории перемещения определяются на борту объекта позиционирования с помощью соответствующих бортовых навигационных приемников, а затем в определенные моменты времени передаются по радиоканалу на контрольный пункт, где фиксируются и, при необходимости, визуализируются, см., например, патенты: [1] - EP 0509775 A2, G01S 19/42, G01S 5/00, G01S 5/14, 21.10.1992; [2] - US 5025261, H04B 7/185, G01S 5/02, 18.06.1991; [3] - US 5644317, G01S 5/02, G01S 3/02, G01C 21/00, 01.07.1997. При этом на борту объекта позиционирования осуществляется прием навигационных радиосигналов, излучаемых навигационными космическими аппаратами (НКА) ГНСС, и обработка их параметров: частот принимаемых радиосигналов и их задержек относительно местной шкалы времени. Для надежного определения координат необходим одновременный устойчивый прием сигналов от нескольких НКА, количество которых должно быть не меньше количества одновременно определяемых ортогональных параметров, что составляет, обычно, четыре и более.
Недостатком рассмотренных систем определения и слежения за местоположением подвижных объектов по сигналам ГНСС является необходимость применения сложного бортового оборудования, осуществляющего корреляционную обработку сигналов, поступающих с НКА, а также дискретность получения на контрольном пункте данных о координатах объекта позиционирования, что для высокодинамичных объектов может оказаться критическим для осуществления слежения.
Известны системы определения и слежения за местоположением подвижных объектов по сигналам ГНСС, в которых принимаемые на объекте позиционирования сигналы, поступающие с НКА, ретранслируются на наземный измерительный пункт (НИП), где по ним определяются текущие координаты объекта, см., например, патент [4] - EP 0508405 A1, G01S 5/14, G07C 5/00, G07C 5/08, 14.10.1992. Достоинством таких систем является перенесение процедур обработки сигналов и навигационных вычислений на НИП, что позволяет существенно упростить и удешевить бортовое оборудование объекта позиционирования. Эти свойства особенно важны при использовании данных устройств на невозвращаемых, часто запускаемых типах объектов, т.к. позволяют внести определенный вклад в снижение затрат при выполнении решаемых указанными объектами задач.
Среди систем указанного типа известны системы, в которых НИП имеет дополнительный канал приема, связывающий его с НКА, см., например, патенты: [5] - US 5119102. H04B 7/185, G01S 5/02, 02.06.1992; [6] - US 5225842, H04B 7/185, G01S 5/02, 02.06.1992. Наличие такого дополнительного канала приема позволяет более быстро и более точно производить навигационные вычисления, в частности, за счет использования служебной информации, получаемой непосредственно с НКА (как это предусматривается в [5]), а также за счет реализации локального дифференциального режима (как это предусматривается в [6]).
Указанный дополнительный канал приема, связывающий НИП с НКА, имеется в принятой в качестве прототипа системе определения местоположения объекта по сигналам ГНСС, описанной в патенте [7] - US 5379224, G01S 5/02, 03.01.1995, где реализуется локальный дифференциальный режим.
Система-прототип содержит космический сегмент в виде НКА GPS, ретранслятор, расположенный на подвижном объекте, осуществляющий прием сигналов НКА и их ретрансляцию, и наземный сегмент в виде НИП, принимающего сигналы ретранслятора и сигналы НКА.
Ретранслятор содержит последовательно соединенные приемник сигналов НКА, преобразователь несущей частоты и передатчик ретранслируемых сигналов.
НИП содержит блок приема и обработки сигналов ретранслятора, а также последовательно соединенные блок приема и обработки сигналов НКА, блок коррекции и блок вычисления координат местоположения ретранслятора, информационный вход которого связан с выходом блока приема и обработки сигналов ретранслятора.
Работа системы-прототипа происходит следующим образом. НКА излучают навигационные радиосигналы, которые принимаются НИП и ретранслятором. Ретранслятор преобразует несущую частоту принимаемых навигационных радиосигналов и переизлучает их в эфир с помощью передатчика ретранслируемых сигналов. Сигналы ретранслятора принимаются на НИП, где с помощью блока приема и обработки сигналов ретранслятора определяются псевдодальности между ретранслятором и НКА. Значения псевдодальностей между ретранслятором и НКА передаются на информационный вход блока вычисления координат местоположения ретранслятора, где определяется положение ретранслятора путем решения системы уравнений на основе измеренных псевдодальностей и рассчитанных координат НКА. Определенное таким образом положение ретранслятора может быть уточнено с помощью поправок, получаемых в блоке коррекции. Для этого с помощью блока приема и обработки сигналов НКА на НИП принимаются навигационные радиосигналы, поступающие непосредственно с НКА, и измеряются псевдодальности между НИП и НКА. Одновременно по априори известным координатам НИП и НКА вычисляются расстояния между ними. Результатом сравнения измеренных и расчетных значений дальностей между НИП и НКА являются дифференциальные поправки, которые позволяют скорректировать измерения псевдодальностей между ретранслятором и НКА, поступающие в блок вычисления координат местоположения ретранслятора. В определенной мере это снижает влияние условий распространения навигационных радиосигналов, эфемеридных и временных погрешностей ГНСС, повышая точность расчетов координат ретранслятора за счет реализации локального дифференциального режима.
Недостатком системы-прототипа является ограниченная зона навигационного обслуживания объекта с реализуемой дифференциальным режимом точностью, что особенно характерно для случаев, когда траектория движения объекта (траектория движения ретранслятора) проходит на больших по высоте удалениях от НИП, например, через ионосферный слой атмосферы, где условия распространения навигационных радиосигналов НКА к ретранслятору кардинально отличаются от условий распространения этих же сигналов к НИП.
Техническим результатом, на получение которого направлено изобретение, является создание системы определения местоположения подвижного объекта по сигналам ГНСС, в которой при любых траекториях движения объекта (траекториях движения ретранслятора) отсутствуют ограничения по зоне навигационного обслуживания объекта с реализуемой дифференциальным режимом точностью в условиях обеспечения радиосвязи в направлении от ретранслятора к НИП.
Сущность изобретения заключается в следующем. Система определения местоположения подвижного объекта по сигналам ГНСС содержит космический сегмент в виде НКА, ретранслятор, расположенный на подвижном объекте, осуществляющий прием сигналов НКА и их ретрансляцию, и наземный сегмент в виде НИП, принимающего сигналы НКА и ретранслятора. Ретранслятор содержит последовательно соединенные приемник сигналов НКА, преобразователь несущей частоты и передатчик ретранслируемых сигналов, а НИН содержит последовательно соединенные блок приема и обработки сигналов НКА, блок коррекции и блок вычисления координат местоположения ретранслятора, информационный вход которого связан с выходом блока приема и обработки сигналов ретранслятора. При этом блок коррекции содержит блок вычисления ионосферной задержки и блок вычисления погрешности эфемеридно-временного обеспечения (ЭВО) НКА, первые входы которых, образующие, соответственно, первый и второй входы блока коррекции, связаны с выходом блока приема и обработки сигналов НКА, а выходы, образующие, соответственно, первый и второй выходы блока коррекции связаны с первым и вторым корректирующими входами блока вычисления координат местоположения ретранслятора. Второй вход блока вычисления погрешности ЭВО НКА связан с выходом блока метеоданных. Второй вход блока вычисления ионосферной задержки связан с выходом блока данных об ионосфере, а третий вход - с выходом блока предвычисления положения ретранслятора, вход которого, образующий третий вход блока коррекции, связан с выходом блока приема и обработки сигнала ретранслятора.
Сущность изобретения и его реализуемость поясняются иллюстративными материалами, представленными на фиг.1-3, где:
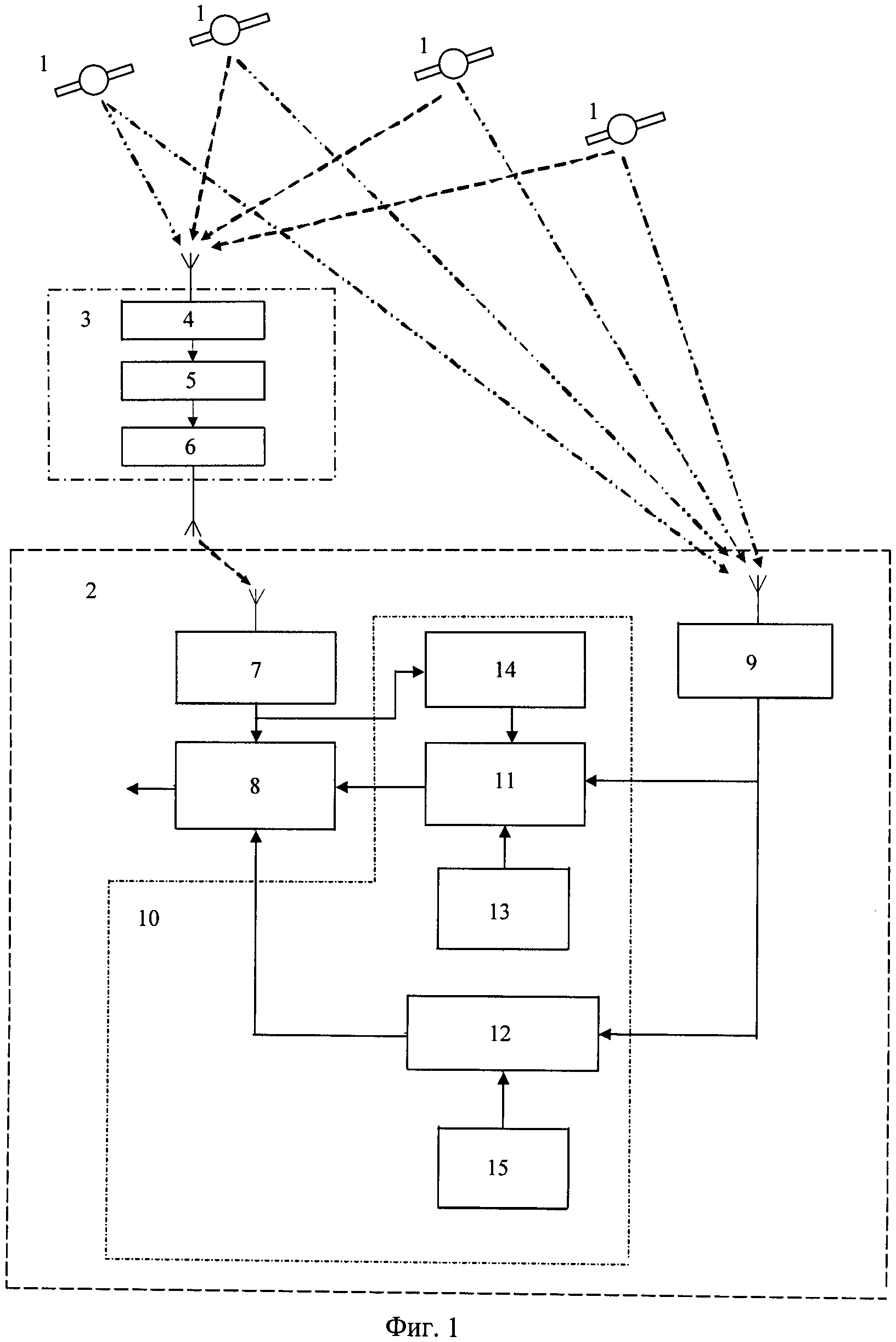
на фиг.1 представлена структурная схема заявляемой системы;
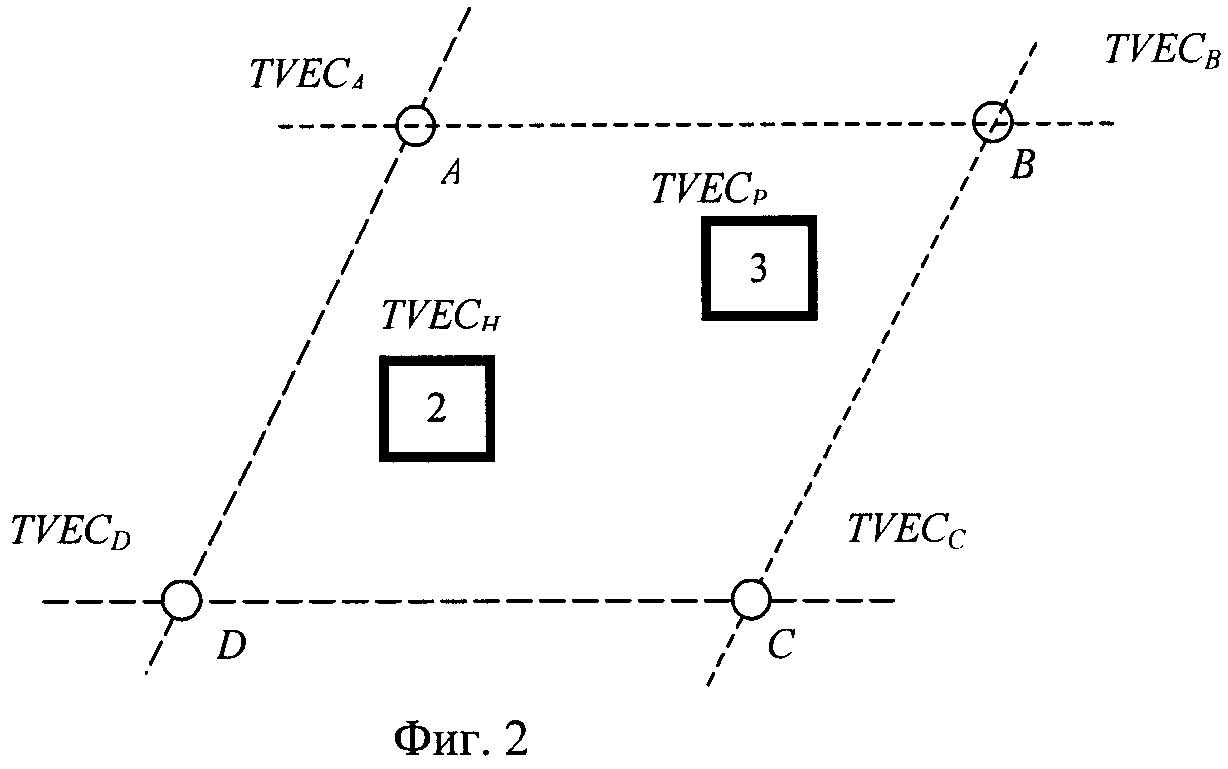
на фиг.2 - условный пример модели ионосферы, горизонтальный срез;
на фиг.3 - условный пример модели ионосферы, вертикальный срез.
Заявляемая система в рассматриваемом примере выполнения (фиг.1) содержит космический сегмент, представляющий собой созвездие НКА 1, излучающих навигационные радиосигналы в частотных диапазонах L1 и L2, наземный сегмент в виде НИН 2, а также ретранслятор 3, расположенный на объекте позиционирования - высокодинамичном летательном аппарате, траектория движения которого проходит через ионосферный слой атмосферы.
Ретранслятор 3 содержит последовательно соединенные приемник 4 сигналов НКА, предназначенный для приема навигационных радиосигналов в частотном диапазоне L1, преобразователь 5 несущей частоты и передатчик 6 ретранслируемых сигналов, предназначенный для передачи в эфир ретранслируемых сигналов НКА 1 в диапазоне УВЧ.
НИП 2 содержит блок 7 приема и обработки сигналов ретранслятора, вход которого, образованный соответствующей приемной антенной, связан радиоканалом с ретранслятором 3, а выход связан с информационный входом блока 8 вычисления координат местоположения ретранслятора, выход которого является информационным выходом системы. В состав НИП 2 входит также блок 9 приема и обработки сигналов НКА, вход которого, образованный соответствующей приемной антенной, связан радиоканалами с находящимися в зоне радиовидимости НКА 1, а выход через блок 10 коррекции связан с соответствующими корректирующими входами блока 8 вычисления координат местоположения ретранслятора.
Блок 10 коррекции содержит блок 11 вычисления ионосферной задержки и блок 12 вычисления погрешности ЭВО НКА, первые входы которых, образующие соответственно первый и второй входы блока 10 коррекции, связаны с выходом блока 9 приема и обработки сигналов НКА. Второй вход блока 11 вычисления ионосферной задержки связан с выходом блока 13 данных об ионосфере, а третий вход связан с выходом блока 14 предвычисления положения ретранслятора, вход которого, образующий третий вход блока 10 коррекции, связан с выходом блока 7 приема и обработки сигнала ретранслятора. Выход блока 11 вычисления ионосферной задержки, образующий первый выход блока 10 коррекции, связан с первым корректирующим входом блока 8 вычисления координат местоположения ретранслятора. Второй вход блока 12 вычисления погрешности ЭВО НКА связан с выходом блока 15 метеоданных. Выход блока 12 вычисления погрешности ЭВО НКА, образующий второй выход блока 10 коррекции, связан со вторым корректирующим входом блока 8 вычисления координат местоположения ретранслятора.
Работа системы осуществляется следующим образом.
НКА 1 излучают навигационные радиосигналы в частотных диапазонах L1 и L2.
Ретранслятор 3 с помощью приемника 4 сигналов НКА осуществляет прием навигационных радиосигналов от НКА 1, находящихся в зоне радиовидимости ретранслятора 3 (как минимум, от четырех НКА), в частотном диапазоне L1. Принимаемые навигационные радиосигналы преобразуются по частоте с помощью преобразователя 5 несущей частоты и переизлучаются с помощью передатчика 6 ретранслируемых сигналов в диапазоне УВЧ.
Ретранслируемые сигналы принимаются на НИП 2 с помощью блока 7 приема и обработки сигналов ретранслятора, который осуществляет корреляционную обработку принимаемых сигналов и измерение псевдодальностей ретранслятора 3 относительно каждого i-го НКА 1, находящегося в зоне радиовидимости  . Результаты обработки - значения псевдодальностей ретранслятора 3 до каждого из НКА 1, находящихся в зоне радиовидимости ретранслятора 3, - поступают в виде цифровых сигналов на информационный вход блока 8 вычисления координат местоположения ретранслятора, а также на вход блока 14 предвычисления положения ретранслятора, входящего в состав блока 10 коррекции.
. Результаты обработки - значения псевдодальностей ретранслятора 3 до каждого из НКА 1, находящихся в зоне радиовидимости ретранслятора 3, - поступают в виде цифровых сигналов на информационный вход блока 8 вычисления координат местоположения ретранслятора, а также на вход блока 14 предвычисления положения ретранслятора, входящего в состав блока 10 коррекции.
Одновременно с этим навигационные радиосигналы от НКА 1, находящихся в зоне радиовидимости НИН 2, обоих частотных диапазонов L1 и L2 принимаются на НИП 2 с помощью блока 9 приема и обработки сигналов НКА, который осуществляет корреляционную обработку принимаемых сигналов, фазовые измерения и измерения псевдодальностей НИП 2 относительно каждого i-го НКА 1, находящегося в зоне радиовидимости НИП 2  , а также производит вычисление зенитных расстояниях z, этих НКА 1.
, а также производит вычисление зенитных расстояниях z, этих НКА 1.
С выхода блока 9 приема и обработки сигналов НКА данные о фазовых измерениях, псевдодальномерных измерениях и зенитных расстояниях zi в виде соответствующих цифровых сигналов поступают на вход блока 11 вычисления ионосферной задержки, где выполняются следующие вычислительные операции по определению задержки в распространении навигационного радиосигнала по трассе «НКА-ретранслятор», обусловленной влиянием ионосферы, а также скорости ее изменения:
1. Вычисляются интегральная электронная концентрация (total electron content - TECi) и скорость ее изменения (dTECi) по трассе «НКА-НИП» для всех i-ых НКА 1, находящихся в зоне радиовидимости НИП 2:


где  - постоянная (своя для каждой ГНСС);
- постоянная (своя для каждой ГНСС);
β≈40,308 м3/с2;
ΔΦ=Φ(tk+1)-Φ(tk) - приращение фазовых измерений на интервале Δt;
Δt=tk+1-tk - дискрет псевдодальномерных и фазовых измерений (временной интервал между текущей (tk+1) и предыдущей (tk) эпохами измерений);
Δτ2/1 - смещение излучаемого навигационного радиосигнала диапазона L2 относительно навигационного радиосигнала диапазона L1, рассчитываемое как:

где 
 Δτn - соответствующие поправки, которые передаются в кадрах цифровой информации ГНСС GPS и ГЛОНАСС.
Δτn - соответствующие поправки, которые передаются в кадрах цифровой информации ГНСС GPS и ГЛОНАСС.
2. Производится расчет значений вертикальных составляющих интегральной электронной концентрации ТVЕСн и ее скорости изменения dTVECн, отвечающие точке размещения НИП 2:


где
- i - номер (индекс) НКА 1;
- n - количество НКА 1, находящихся в зоне радиовидимости НИП 2 в текущий момент времени;
- zi - зенитное расстояние i-го НКА 1;
- B(zi)={1-[RE/(RE+hm)]2·sin2zi}1/2;;
- RE - средний радиус Земли;
- hm - среднее значение высоты ионосферы.
3. Определяются значения вертикальных составляющих интегральной электронной концентрации TVECp и ее скорости изменения dTVECp, соответствующие текущему положению ретранслятора 3. Для этого используются данные, снимаемые с выхода блока 14 предвычисления положения ретранслятора, и информация о состоянии ионосферы, получаемая с выхода блока 13. Модель ионосферы, используемая для данных целей, может быть образно представлена в виде горизонтального и вертикального срезов, соответствующих фиксированным моментам времени. Горизонтальный срез ионосферной модели (фиг.2) характеризуется опорной (координатной) сеткой с известными значениями вертикальных составляющих интегральной электронной концентрации TVEC в ее узловых точках. Вертикальный срез ионосферной модели (фиг.3) описывает содержание электронной концентрации (ne) в соответствующем высотном слое ионосферы (R). Приведение этих данных (путем интерполяции) к точке расположения НИП 2 на момент измерений и сопоставление их с вычисленными значениями TVECн и dTVECн позволяет оценить адекватность модели реальным условиям и, при необходимости, скорректировать ее параметры. Далее, с использованием указанной модели и предвычесленных координат ретранслятора 3 определяются значения TVECp и dTVECp для текущего положения ретранслятора 3.
4. Рассчитывается ионосферная задержка  по трассе «НКА-ретранслятор» для каждого i-го НКА 1, находящегося в зоне радиовидимости ретранслятора 3, и скорость ее изменения
по трассе «НКА-ретранслятор» для каждого i-го НКА 1, находящегося в зоне радиовидимости ретранслятора 3, и скорость ее изменения 


Приведенные в формулах (1)-(7) математические зависимости определяются известными соотношениями (см., например, работы: [8] - Schaer S. Mapping and Predicting the Earth's Ionosphere Using the Global Positioning System // Ph. D. Dissertation, Astronomical Institute of the University of Bern, Switzerland, 1999; [9] - Аким Э.Л., Тучин Д.А. Ионосферная составляющая измерений псевдодальности околоземных космических аппаратов / РАН. Институт прикладной математики им. М.В.Келдыша // М., Препринт, 04.04.2004).
Полученные таким образом значения задержки в распространении навигационного радиосигнала, обусловленной влиянием ионосферы на трассе «НКА-ретранслятор», а также скорости ее изменения в виде соответствующих цифровых сигналов поступают с выхода блока 11 вычисления ионосферной задержки на первый корректирующий вход блока 8 вычисления координат местоположения ретранслятора.
Одновременно с этим с выхода блока 9 приема и обработки сигналов НКА данные об измеренных значениях псевдодальностей  и зенитных расстояниях z; поступают в виде цифровых сигналов на вход блока 12 вычисления погрешности ЭВО НКА, где выполняются следующие вычислительные операции:
и зенитных расстояниях z; поступают в виде цифровых сигналов на вход блока 12 вычисления погрешности ЭВО НКА, где выполняются следующие вычислительные операции:
1. По априори известным координатам НИН 2 на каждый момент времени определяется расчетное  расстояние от НИП 2 до каждого i-го НКА 1, находящегося в зоне радиовидимости НИП 2, сравнивается с измеренной
расстояние от НИП 2 до каждого i-го НКА 1, находящегося в зоне радиовидимости НИП 2, сравнивается с измеренной  псевдодальностью и по каждому из этих НКА 1 рассчитывается суммарная погрешность измерения псевдодальности
псевдодальностью и по каждому из этих НКА 1 рассчитывается суммарная погрешность измерения псевдодальности  , выраженная во временном эквиваленте и приведенная к частоте сигнала fL1 в диапазоне L1:
, выраженная во временном эквиваленте и приведенная к частоте сигнала fL1 в диапазоне L1:

где c - скорость света.
Одновременно, путем дифференцирования, оценивается скорость изменения этой погрешности:

2. Рассчитывается ионосферная составляющая Δui погрешности измерения псевдодальности по трассе «НКА-НИП» с использованием двухчастотного метода:

где  - измеренная псевдодальность на частоте сигнала fL1 в диапазоне L1;
- измеренная псевдодальность на частоте сигнала fL1 в диапазоне L1;
 - измеренная псевдодальность на частоте сигнала fL2 в диапазоне L2.
- измеренная псевдодальность на частоте сигнала fL2 в диапазоне L2.
Одновременно, путем дифференцирования, оценивается скорость изменения этой погрешности:

3. Вычисляется тропосферная составляющая Δтр, погрешности измерения псевдодальности по трассе «НКА-НИП» с использованием модели тропосферы и текущих значений температуры, давления и влажности атмосферного воздуха, поступающих с выхода блока 15 метеоданных:

где Т - температура ([К]);
p - атмосферное давление ([mbar]);
е - парциальное давление паров воды ([mbar]), характеризующее влажность воздуха;
zi - зенитное расстояние i-го HKA 1;
В и δR - корректирующие коэффициенты, определяющие специфичность места расположения НИП 2.
Одновременно, путем дифференцирования, оценивается скорость изменения этой погрешности:

4. Выполняется расчет погрешности ЭВО НКА  и скорости изменения этой погрешности в соответствии с выражениями:
и скорости изменения этой погрешности в соответствии с выражениями:


Вычисленные таким образом значения погрешности ЭВО НКА и скорости ее изменения в виде соответствующих цифровых сигналов поступают на второй корректирующий вход блока 8 вычисления координат местоположения ретранслятора.
Таким образом, на входы блока 8 вычисления координат местоположения ретранслятора поступают следующие информационные и корректирующие сигналы:
- на информационный вход с выхода блока 7 приема и обработки сигналов ретранслятора поступают измеренные значения псевдодальностей  ,
,
- на первый корректирующий вход с выхода блока 11 вычисления ионосферной задержки поступают значения задержки радиосигнала  , обусловленной влиянием ионосферы на трассе «НКА-ретранслятор», и скорости ее изменения
, обусловленной влиянием ионосферы на трассе «НКА-ретранслятор», и скорости ее изменения  ,
,
- на второй корректирующий вход с выхода блока 12 вычисления погрешности ЭВО НКА поступают значения погрешности ЭВО НКА  и скорости ее изменения
и скорости ее изменения 
В блоке 8 вычисления координат местоположения ретранслятора выполняются следующие вычислительные операции:
1. Вычисляются суммарные корректирующие поправки  к измеренным псевдодальностям до каждого i-то НКА 1, находящегося в зоне видимости ретранслятора 3, как алгебраическая сумма слагаемых:
к измеренным псевдодальностям до каждого i-то НКА 1, находящегося в зоне видимости ретранслятора 3, как алгебраическая сумма слагаемых:

где: t0 - момент времени формирования поправок;
t - текущее время.
2. Корректируются измеренные значения псевдодальностей до каждого i-то НКА 1 как алгебраическая сумма слагаемых:

3. Выполняется вьгаисление координат ретранслятора 3 путем решения системы уравнений с четырьмя неизвестными (x, y, z, Δt'), используя исправленные значения  псевдодальностей до четырех или более НКА 1:
псевдодальностей до четырех или более НКА 1:

где: i - номер НКА 1 (i≥4);
Di - истинная геометрическая дальность от ретранслятора до i-го НКА 1;
xНКАi, yНКАi, zНКАi - координаты i-го НКА 1;
x, y, z - координаты ретранслятора 3;
Δt' - рассогласование шкал времени НКА 1 и НИП 2;
с - скорость света.
Приведенные в формулах (8)÷(18) математические зависимости определяются известными соотношениями (см., например, работу [10] - ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. // М.: Радиотехника, 2010, с.272-304, 440-452).
Полученные в результате решения системы уравнений координаты объекта позиционирования (координаты ретранслятора 3) снимаются с выхода блока 8 вычисления координат местоположения ретранслятора, образующего информационный выход системы.
Таким образом, в заявленной системе осуществляется высокоточное (обусловленное реализуемым дифференциальным режимом) определение местоположения объекта позиционирования - летательного аппарата, траектория движения которого проходит на больших по высоте удалениях от НИП 2 через ионосферный слой атмосферы, где условия распространения навигационных радиосигналов от НКА 1 к расположенному на объекте позиционирования ретранслятору 3 кардинально отличаются от условий распространения этих же сигналов от НКА 1 до НИП 2.
Рассмотренное показывает, что заявляемое изобретение осуществимо и дает технический результат, заключающийся в создании системы определения местоположения подвижного объекта по сигналам ГНСС, в которой при любых траекториях движения объекта, несущего ретранслятор 3, отсутствуют ограничения по зоне навигационного обслуживания объекта с реализуемой дифференциальным режимом точностью в условиях обеспечения радиосвязи в направлении от ретранслятора 3 к НИП 2.
Источники информации
1. ЕР 0509775 A2, G01S 19/42, G01S 5/00, G01S 5/14, опубл. 21.10.1992.
2. US 5025261, H04B 7/185, G01S 5/02, опубл. 18.06.1991.
3. US 5644317, G01S 5/02, G01S 3/02, G01C 21/00, опубл. 01.07.1997.
4. ЕР 0508405 А1, G01S 5/14, G07C 5/00, G07C 5/08, опубл. 14.10.1992.
5. US 5119102, H04B 7/185, G01S 5/02, опубл. 02.06.1992.
6. US 5225842, H04B 7/185, G01S 5/02, опубл. 02.06.1992.
7. US 5379224, G01S 5/02, опубл. 03.01.1995.
8. International GPS Service. Information and Resources / IGS Central Bureau, 2001.
9. Schaer S. Mapping and Predicting the Earth's Ionosphere Using the Global Positioning System // Ph. D. Dissertation, Astronomical Institute of the University of Bern, Switzerland, 1999.
10. Аким Э.Л., Тучин Д.А. Ионосферная составляющая измерений псевдодальности околоземных космических аппаратов / РАН. Институт прикладной математики им. М.В. Келдыша // М., Препринт, 04.04.2004.
11. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. // М., Радиотехника, 2010, с.272-304, 440-452.
Система определения местоположения подвижного объекта по сигналам глобальных навигационных спутниковых систем, содержащая космический сегмент в виде навигационных космических аппаратов (НКА), ретранслятор, расположенный на подвижном объекте, осуществляющий прием сигналов НКА и их ретрансляцию, и наземный сегмент в виде наземного измерительного пункта (НИП), принимающего сигналы НКА и ретранслятора, при этом ретранслятор содержит последовательно соединенные приемник сигналов НКА, преобразователь несущей частоты и передатчик ретранслируемых сигналов, а НИП содержит последовательно соединенные блок приема и обработки сигналов НКА, блок коррекции и блок вычисления координат местоположения ретранслятора, сигнальный вход которого связан с выходом блока приема и обработки сигналов ретранслятора, отличающаяся тем, что блок коррекции содержит блок вычисления ионосферной задержки и блок вычисления погрешности эфемеридно-временного обеспечения (ЭВО) НКА, первые входы которых, образующие соответственно первый и второй входы блока коррекции, связаны с выходом блока приема и обработки сигналов НКА, а выходы, образующие соответственно первый и второй выходы блока коррекции, связаны с первым и вторым корректирующими входами блока вычисления координат местоположения ретранслятора, при этом второй вход блока вычисления погрешности ЭВО НКА связан с выходом блока метеоданных, второй вход блока вычисления ионосферной задержки связан с выходом блока данных об ионосфере, а третий вход блока вычисления ионосферной задержки связан с выходом блока предвычисления положения ретранслятора, вход которого, образующий третий вход блока коррекции, связан с выходом блока приема и обработки сигнала ретранслятора.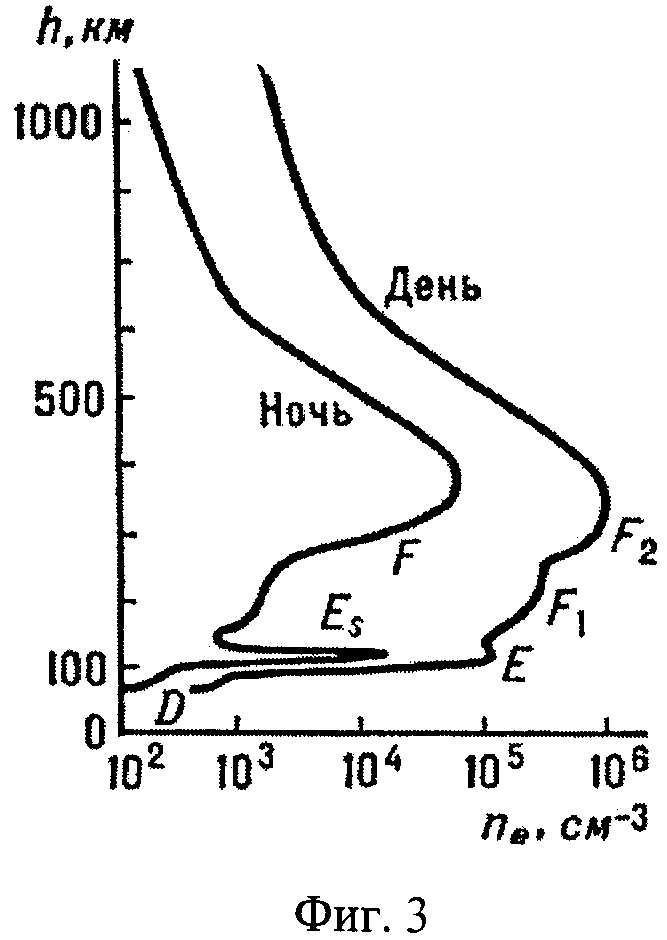
Квантовый дискриминатор на газовой ячейке
Модуль приемника сигналов глобальных навигационных спутниковых систем
Зеемановский замедлитель атомного пучка
Устройство лазерной оптической накачки квантового дискриминатора
Оборудование для стрелкового оружия, сигнализирующее о попадании линии прицеливания в запрещенный сектор стрельбы
Квантовый стандарт частоты на основе эффекта когерентного пленения населенности
Сигнализирующее устройство для стрелка, предупреждающее о попадании линии прицеливания в запрещенный сектор
Система определения и контроля местоположения подводного объекта
Устройство определения аппаратной задержки выходного сигнала передатчика
Способ измерения частоты гармонического сигнала и устройство для его осуществления
Квантовый дискриминатор на газовой ячейке
Модуль приемника сигналов глобальных навигационных спутниковых систем
Зеемановский замедлитель атомного пучка
Устройство лазерной оптической накачки квантового дискриминатора
Оборудование для стрелкового оружия, сигнализирующее о попадании линии прицеливания в запрещенный сектор стрельбы
Квантовый стандарт частоты на основе эффекта когерентного пленения населенности
Сигнализирующее устройство для стрелка, предупреждающее о попадании линии прицеливания в запрещенный сектор
Система определения и контроля местоположения подводного объекта
Устройство определения аппаратной задержки выходного сигнала передатчика
Способ измерения частоты гармонического сигнала и устройство для его осуществления

