Результат интеллектуальной деятельности: СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано при разработке систем шумопеленгования для гидроакустических комплексов.
Известны пассивные методы определения дистанции по составу спектра принимаемого сигнала (Спицин Е.И., Проскурякова Т.В. Способ наименьших квадратов в спектральном методе определения дистанции при однолучевом приеме // Вопросы кораблестроения. Сер. Акустика. ЦНИИ «Румб» 1977 г. Вып. 8; Исак В.А. Измерение дистанции пассивными методами // Морской сборник 1987 г., №5, стр. 68-70; Демиденко В.А. Частотный метод оценки расстояния и его эффективность при работе ГАС в пассивном режиме // Гидроакустика, 1993 г. Вып 1. Стр. 3-16. Для оценки дистанции спектральные методы используют в качестве физической основы зависимость степени затухания интенсивности звука от частоты при распространении в водной среде.
Известен способ, в котором в качестве параметра для оценки дистанции, используют закон спада (наклон) спектра сигнала в точке приема (Демиденко В.А., Перельмутер Ю.С. Спектральный метод оценки дистанции // Гидроакустика 2006 г. Вып. 6. Стр. 51-59).
Этот способ предполагает сопровождение цели в режиме шумопеленгования, спектральный анализ сигнала в широкой полосе частот, измерение спада спектра сигнала в точке приема, определение дистанции до цели по результатам этого измерения, с учетом априорных знаний параметров формы спектра сигнала, излучаемого целью, и величины пространственного затухания в морской среде. Этот способ наиболее близок к предлагаемому изобретению и поэтому выбран в качестве прототипа.
Современные системы приема и обработки сигналов шумоизлучения работают в условиях повышенного судоходства, и поэтому на входе гидроакустической антенны могут присутствовать сигналы, принадлежащие нескольким источникам шумоизлучения, расположенным на различных дистанциях, но находящихся в одном и том же направлении. Поэтому принимаемый сигнал шумоизлучения будет содержать несколько составляющих от нескольких независимых источников, и на вход системы измерения спектров будет поступать общий спектр, по которому и будет производиться оценка дистанции. В этой ситуации границы спектра, определяющие закон спада спектра, не будут соответствовать эталонному спаду спектра, при этом неизвестно, что сказывается на изменение закона спада спектра, внешняя среда и собственное шумоизлучение при движении антенны, или наличие нескольких целей на одном направлении. Все это приводит к ошибочной и недостоверной оценке дистанции.
Таким образом, недостатком способа прототипа, как и других приведенных выше способов, является недостоверность оценки дистанции в условиях мешающего судоходства и сложной помехо-сигнальной ситуации.
Техническим результатом изобретения является повышение достоверности определения оценки дистанции до шумящего в море объекта.
Указанный технический результат достигается тем, что в известный способ, содержащий прием гидроакустического шумового сигнала гидроакустической антенной, сопровождение цели в режиме шумопеленгования, спектральный анализ гидроакустического шумового сигнала в широкой полосе частот, определение дистанции до цели дополнительно ввены новые операции, а именно: прием гидроакустического шумового сигнала производят половинами гидроакустической антенны, измеряют взаимный спектр между гидроакустическими шумовыми сигналами, принятыми половинами гидроакустической антенны; измеряют автокорреляционную функцию этого взаимного спектра (АКФ); определяют число целей по наличию перегибов автокорреляционной функции и при отсутствии таковых измеряют ΔТизм - ширину основного максимума АКФ на уровне 0,1, определяют калибровочный коэффициент М=Дизв./ΔТд.изв., где Дизв. - известная дистанция обнаружения цели фиксированной шумности с известным спадом спектра, ΔТд.изв. - ширина основного максимума АКФ, соответствующая известной дистанции; и определяют дистанцию до цели по формуле Д=ΔТизм*М.
Поясним сущность предлагаемого способа. Известно, что ширина основного максимума АКФ взаимного спектра принятого сигнала ΔТ (первый ноль АКФ) обратно пропорциональна ширине спектра принятого сигнала ΔF: т.е. ΔТ=1/ΔF (Дж. Бендат, А. Пирсол. Применения корреляционного и спектрального анализа. Пер. с англ., Москва, «Мир», 1983, стр. 71).
Поэтому в качестве параметра оценки ширины спектра принятого сигнала (ΔFизм) предлагается использовать значение ширины огибающей основного максимума автокорреляционной функции взаимного спектра принятого сигнала.
Использование ΔТизм в качестве оценочного параметра ширины спектра принятого сигнала для дальнейшей оценки дистанции позволяет исключить основные недостатки спектральных методов, не способных учесть искажения, вносимые в сигнал цели в точке приема:
- многолучевостью при распространении сигнала цели;
- вкладом шумов моря в спектр принимаемого сигнала цели;
- влиянием шумоизлучения дальнего судоходства;
- наличием нескольких целей на направлении приема.
Наличие многолучевости в принятом сигнале (наличие задержек между лучами) в АКФ проявится присутствием дополнительных максимумов, не влияющих на форму основного максимума (лучи будут разделены во времени), в то время как при спектральном методе оценки дистанции, они будут неразличимы и будут наблюдаться в одном спектре оказывая взаимное искажающее влияние.
Спектры шумов моря в точке приема так же будут различимы от шумов цели, так как они имеют существенно более широкую полосу частот, чем сигнал от цели, прошедший большое расстояние. Аналогично спектр шумов мешающих целей (шумы дальнего судоходства) носит узкополосный характер, связанный с дистанцией до них. (Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике. - Судостроение. Л. 1988, стр.99). Следовательно, ширины максимумов АКФ дальнего судоходства и шумов моря будут существенно уже, чем ширина максимума цели, и ее искажение не будет влиять на оценку ширины максимума огибающей автокорреляционной функции ΔТизм сигнала шумоизлучения, обнаруженного объекта.
Наличие одной или нескольких целей в направлении приема приводит к искажению ширины и формы огибающей основного максимума АКФ (см. патент РФ №2110810). В этом техническом решении используется известное соотношение, которое основано на том, что сумма спектров формирует сумму автокорреляционных функций. Это приводит к искажению основного максимума огибающей автокорреляционной функции, которое соответствует огибающей автокорреляционной функции одиночного спектра. Поэтому оценку дистанции следует проводить только в случае, если таких искажений не наблюдается - отсутствуют другие цели в направлении приема.
Во всех современных гидроакустических комплексах (ГАК) существуют системы прогнозирования дистанции обнаружения цели заданной шумности с известным законом спада спектра (В.Н. Матвиенко, Ю.Ф. Тарасюк. Дальность действия гидроакустических средств, Судостроение. Л. 1981 г.; «Справочник по гидроакустике», Л., Судостроение, 1982 г., с. 102, 103; А.П. Евтютов, В.Б. Митько. Инженерные расчеты в гидроакустике, Л., «Судостроение», 1988 г., с. 219-223; 229-234). Задавшись для цели значениями приведенного уровня шумности, законом спада спектра в источнике и глубиной погружения, а также измерив зависимость скорости звука в воде от глубины, волнение на поверхности моря, рассчитывают по глубине приемной антенны акустическое поле сигнала цели по дистанции с учетом аномалии распространения сигнала.
Зная технические характеристики приемного тракта ГАК, определяют дистанцию обнаружения Дизв. цели. Для данной дистанции рассчитывают ширину спектра обнаруженного сигнала заданной цели и соответствующую ей ширину основного максимума АКФ ΔТд.изв.. По результатам расчета можно определить калибровочный коэффициент (М), позволяющий по величине измеренной ширины основного максимума АКФ взаимного спектра на уровне 0,1 (ΔТ изм) оценить дистанцию (Д):
М=Дизв./ΔТд.изв; Д=М*ΔТизм
Точность измерения дистанции будет определяться точностью измерения (а) ширины основного максимума АКФ на уровне 0,1 (ΔТизм), которая определяется выражением  где q - отношение сигнал/помеха в широкой полосе частот. (Примеры и задачи по статистической радиотехнике под ред. В.И. Тихонова, М., Сов. радио, 1970 г., стр. 538).
где q - отношение сигнал/помеха в широкой полосе частот. (Примеры и задачи по статистической радиотехнике под ред. В.И. Тихонова, М., Сов. радио, 1970 г., стр. 538).
При минимальной ширине основного максимума АКФ на уровне 0,1, равной 0,2 мс (ΔТ изм=0,2 мс), что соответствует полосе принимаемого сигнала 5 кГц и при отношении сигнал/помеха q=3 (устойчивое обнаружение - А.П. Евтютов, В.Б. Митько. Инженерные расчеты в гидроакустике, Л., «Судостроение», 1988 г.) точность измерения ΔТ составит 0,04 мс, что менее или равно разрешению по времени в используемых устройствах вычисления АКФ, и, практически, не окажет влияния на точность оценки дистанции.
Калибровку также можно провести с использованием реальной ситуации в процессе первичного обнаружения. Цель, имеющую известную шумность и известный закон спада спектра обнаруживают, измеряют ширину основного максимума АКФ взаимного спектра на уровне 0,1, определяют дистанцию до цели штурманскими приборами и по формуле определяют калибровочный коэффициент (М). Полученный коэффициент используют для оценки дистанции последующих обнаруживаемых целей.
На чертеже приведена блок-схема устройства, реализующая предлагаемый способ. Антенна 1 через блок 2 предварительной обработки и формирования характеристик направленности, через блок 3 БПФ и измерение взаимного спектра, блок 4 вычисления автокорреляционной функции, блок 5 определения числа целей автокорреляционной функции соединен с первым входом блока 7 определения дистанции. Второй выход блока 5 через первый вход индикатора 6 соединен со вторым входом блока 7, выход блока 7 соединен со вторым входом индикатора 6. Блок 9 исходных данных через блок 8 расчета Дмакс соединен с третьим входом блока 7 определения дистанции.
Предложенный способ целесообразно проиллюстрировать на примере работы реализующего его устройства, приведенного на чертеже.
Шумовой сигнал принимается половинами антенны 1, передается в блок 2, в котором происходит спектральный анализ шумового процесса с выходов двух половин ПК антенны и определение взаимного спектра между шумовыми сигналами с двух ее половин, после чего в блоке 4 вычисляется автокорреляционная функция исходного шумового процесса. Полученная автокорреляционная функция поступает на блок 5 определения числа целей. Определение числа целей может происходить автоматически, как рассмотрено в патенте РФ №2110810, а можно определить по виду автокорреляционной функции визуально оператором по числу точек перегиба огибающей автокорреляционной функции. Эти данные поступают в блок 7 определения дистанции, куда поступает через блок 5 и сама автокорреляционная функция. В блоке 7 происходит измерение ширины автокорреляционной функции и при наличии одной цели в спектре шумоизлучения, производится определение дистанции по формуле Д=М*ΔТизм. В блоке 8 расчета Дизв. производится определение коэффициента М, для чего из блока 9 поступают исходные данные для расчета. Такими данными является глубина погружения антенны, измеренная зависимость скорости звука от глубины и предполагаемый вид спада спектра источника шумоизлучения. По этим данным рассчитывается коэффициент М. Определенная по ширине автокорреляционной функции дистанция передается на индикатор 6 для представления оператору.
Таким образом, используя огибающую автокорреляционной функции, можно определить дистанцию до источника шумоизлучения по ее ширине и повысить достоверность измерения в условиях сложной помехо-сигнальной ситуации, определив наличие одной цели.
Способ оценки дистанции до шумящего в море объекта, в котором принимают гидроакустический шумовой сигнал, осуществляют сопровождение цели, спектральный анализ сигнала в широкой полосе частот, определяют дистанции до цели, отличающийся тем, что прием гидроакустического шумового сигнала производят половинами гидроакустической антенны, измеряют взаимный спектр между гидроакустическими шумовыми сигналами, принятыми половинами гидроакустической антенны; измеряют автокорреляционную функцию этого взаимного спектра (АКФ); определяют число целей по наличию перегибов автокорреляционной функции, и при отсутствии таковых измеряют ΔТ - ширину основного максимума АКФ на уровне 0,1, определяют калибровочный коэффициент М=Д/ΔТ, где Д - известная дистанция обнаружения цели фиксированной шумности с известным спадом спектра, ΔТ - ширина основного максимума АКФ, соответствующая известной дистанции; и определяют дистанцию до цели по формуле Д=ΔТ*М.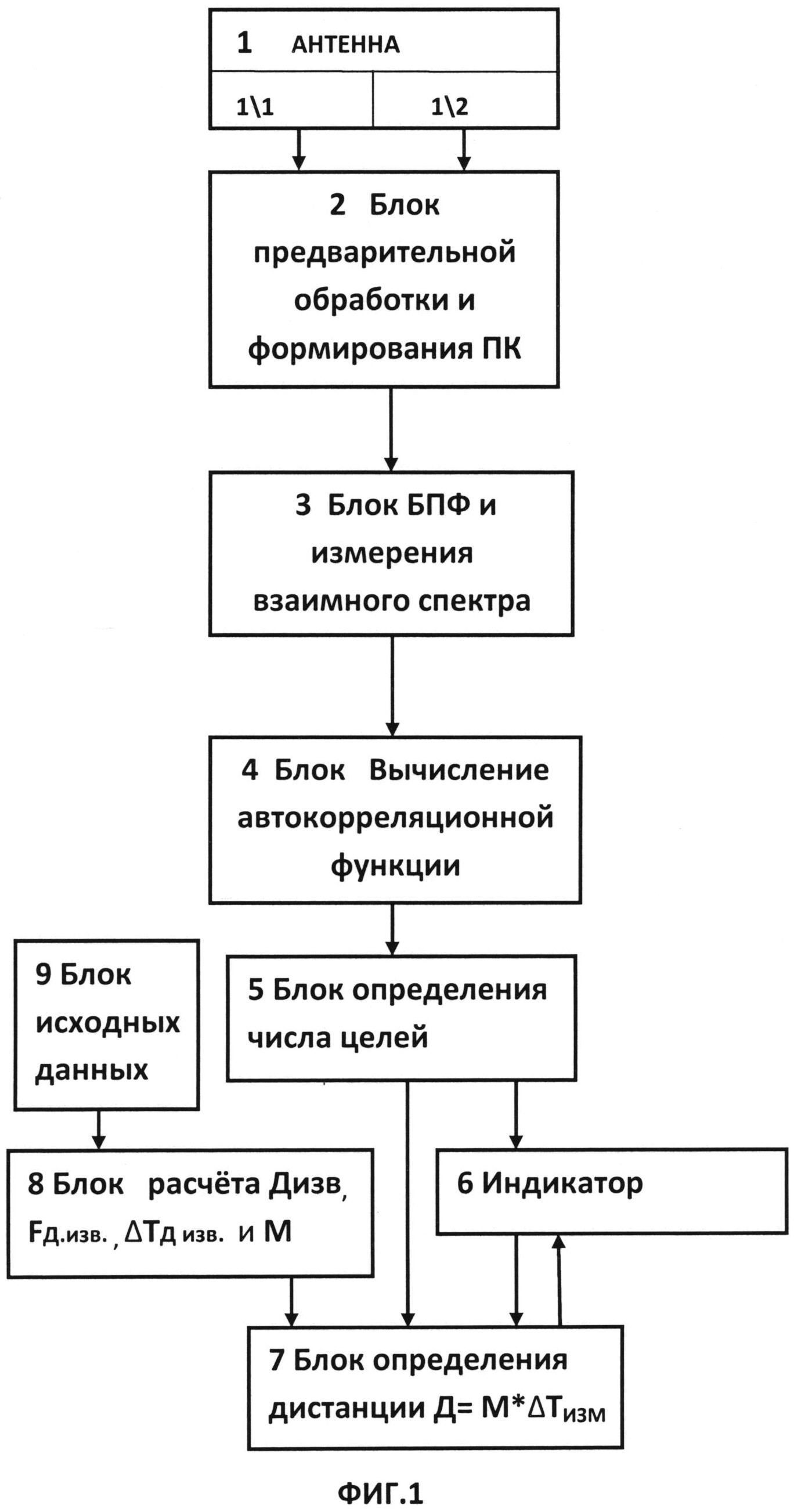
Способ измерения гидролокатором параметров вытекающего газа из трубы подводного газопровода
Способ определения маневра шумящего объекта
Способ обнаружения локального объекта на фоне распределенной помехи
Способ обнаружения и определения дистанции с помощью взрывного сигнала в гидроакустической локальной сетевой системе связи
Гидролокационный способ обнаружения объекта и измерения его параметров
Способ классификации гидроакустических сигналов шумоизлучения морских объектов
Способ определения маневра шумящего объекта
Способ отображения гидролокационной информации
Способ обработки и классификации гидролокационной информации
Способ отображения гидролокационной информации
Способ определения параметров маневрирования источника зондирующих сигналов
Способ отображения гидроакустической информации

