Результат интеллектуальной деятельности: СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного, наземного и морского пространства с использованием прямых и рассеянных подвижными объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Технология скрытного обнаружения и слежения за объектами, использующая естественный радиоподсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения: широковещательные (УКВ FM-радиовещание, ДМВ цифровое телевидение), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Принятый радиосигнал, как правило, включает мощные прямые радиосигналы и рассеянные от земной инфраструктуры компоненты сигнала выбранного передатчика радиоподсвета целей. Кроме того, он содержит задержанные по времени и сдвинутые на частоту доплеровского смещения рассеянные объектами сигналы, а также сигналы других неконтролируемых источников, работающих на частоте, совпадающей с частотой приема. Для эффективного поиска широкого класса объектов (автомобили, корабли, самолеты и беспилотные летательные аппараты, вертолеты, ракеты, спускаемые аппараты) необходимо качественное выделение слабых рассеянных от объектов радиосигналов на фоне мощного прямого сигнала выбранного передатчика радиоподсвета, а также на фоне сигналов других нежелательных источников. В наиболее типичных ситуациях уровень помех на 40-60 дБ превышает уровень рассеянных сигналов.
Системы скрытной радиолокации включают канал приема прямого сигнала передатчика подсвета и разведывательный канал.
Традиционно в системах скрытной радиолокации частичное подавление помехи в виде прямого сигнала передатчика подсвета осуществляется за счет минимизации боковых лепестков, формирования нуля в диаграмме направленности антенны или адаптивной пространственной фильтрации полезных сигналов в разведывательном канале.
Дополнительное подавление прямого сигнала может быть достигнуто за счет использования в разведывательном канале антенны с поляризацией, ортогональной к поляризации радиосигнала передатчика подсвета.
Однако лучшие характеристики систем скрытной радиолокации могут быть достигнуты при использовании двух разведывательных каналов с ортогональными поляризациями. Это обусловлено тем, что рассеянный целью сигнал, как правило, имеет случайную поляризацию. Как следствие, некогерентное суммирование изображений в координатах «временная задержка (дальность) - доплеровская частота (скорость)», формируемых с использованием радиосигналов двух ортогональных поляризаций, обеспечивает увеличение среднего отношения сигнал/шум по сравнению с использованием единственной фиксированной поляризации. Кроме того, это повышает устойчивость процедуры поиска к канальным и межканальным помехам, как правило, имеющим отличную от полезного сигнала поляризацию.
Известен способ поляризационно-чувствительного поиска малоразмерных подвижных объектов [1], включающий прием рассеянных подвижными объектами радиосигналов неизвестной поляризации малобазовой антенной решеткой, состоящей из ортогонально расположенных антенн с совмещенными фазовыми центрами, формирование ансамбля радиосигналов, зависящего от времени и номера антенны, синхронное преобразование ансамбля принятых радиосигналов в цифровые сигналы, преобразование цифровых сигналов пар противоположных антенн в комплексные квадратурные составляющие дипольного и квадрупольного выходных сигналов, определение наличия рассеянных подвижными объектами радиосигналов и направлений их прихода по сигналам квадратурных составляющих дипольного и квадрупольного выходных сигналов.
Данный способ обеспечивает повышенную устойчивость поиска, то есть обнаружения и пространственной локализации объектов, к поляризационным ошибкам. Однако этот способ относится к классу требующих высоких отношений сигнал-шум способов малобазового пеленгования, что является принципиальным ограничением на пути достижения потенциально возможных точностей пространственной локализации малоразмерных подвижных объектов.
Известен способ поляризационно-чувствительного поиска малоразмерных подвижных объектов [2], свободный от этих недостатков и принятый за прототип. Согласно этому способу:
используют прямые и рассеянные подвижными объектами радиосигналы, излучаемые широкополосными передатчиками радиоэлектронных систем различного назначения;
принимают решеткой из N антенн компоненты горизонтальной и вертикальной поляризации векторного многолучевого электромагнитного поля прямого и рассеянных радиосигналов;
синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы;
цифровые сигналы преобразуют в двухкомпонентные прямой  и рассеянные
и рассеянные  сигналы для выбранных азимутально-угломестных направлений приема, где h и v - индексы компонент горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают;
сигналы для выбранных азимутально-угломестных направлений приема, где h и v - индексы компонент горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают;
вычисляют и сравнивают энергию компонент  и
и  прямого сигнала;
прямого сигнала;
выбирают компоненту прямого сигнала с максимальной энергией  ;
;
преобразуют компоненту прямого сигнала с максимальной энергией
в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом;
для каждого выбранного азимутально-угломестного направления приема преобразуют рассеянный сигнал s в сигналы компонент комплексного частотно-временного изображения hh=(AHA)-1AHsh и hv=(AHA)-1AHsv, где AH - матрица, эрмитово сопряженная с A;
после чего по локальным максимумам суммы квадратов модулей элементов компонент комплексного частотно-временного изображения  , где
, где  и
и  - z-е элементы сигналов компонент hh и hv, определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
- z-е элементы сигналов компонент hh и hv, определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
Способ-прототип реализует достаточно эффективный поиск малоразмерных подвижных объектов в условиях неизвестной поляризации рассеянных объектами сигналов.
Однако способ-прототип при формировании сигналов компонент горизонтальной и вертикальной поляризации комплексного частотно-временного изображения использует операции, основанные на формировании классической двумерной взаимной корреляционной функции, которая, кроме основного лепестка, содержит высокие боковые лепестки, маскирующие рассеянные малоразмерными объектами слабые сигналы.
Таким образом, недостатком способа-прототипа является низкая вероятность поиска малоразмерных подвижных объектов.
Техническим результатом изобретения является повышение вероятности поиска малоразмерных подвижных объектов.
Повышение вероятности поиска достигается за счет применения новых операций адаптивной обработки с обратной связью по полезному радиосигналу, обеспечивающих повышение чувствительности и динамического диапазона при формировании компонент горизонтальной и вертикальной поляризации двухкомпонентного комплексного частотно-временного изображения радиосигналов, рассеянных объектами в анализируемой области доплеровских частот и временных задержек.
Технический результат достигается тем, что в способе поляризационно-чувствительного поиска малоразмерных подвижных объектов, заключающемся в том, что используют прямые и рассеянные подвижными объектами радиосигналы, излучаемые широкополосными передатчиками радиоэлектронных систем различного назначения, принимают решеткой из N антенн компоненты горизонтальной и вертикальной поляризации векторного многолучевого электромагнитного поля прямого и рассеянных радиосигналов, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы преобразуют в двухкомпонентные прямой  и рассеянные
и рассеянные  сигналы для выбранных азимутально-угломестных направлений приема, где h и v - индексы компонент горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают, вычисляют и сравнивают энергию компонент
и
прямого сигнала, выбирают компоненту прямого сигнала с максимальной энергией
, преобразуют компоненту прямого сигнала с максимальной энергией
в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом, согласно изобретению, матричный сигнал комплексной фазирующей функции A запоминают, для каждого выбранного азимутально-угломестного направления приема преобразуют рассеянный сигнал s в сигналы компонент комплексного частотно-временного изображения h(0),h=(AHA)-1AHsh и h(0),v=(AHA)-1AHsv, где AH - матрица, эрмитово сопряженная с A, сигналы компонент h(0),h и h(0),v запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал
сигналы для выбранных азимутально-угломестных направлений приема, где h и v - индексы компонент горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают, вычисляют и сравнивают энергию компонент
и
прямого сигнала, выбирают компоненту прямого сигнала с максимальной энергией
, преобразуют компоненту прямого сигнала с максимальной энергией
в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом, согласно изобретению, матричный сигнал комплексной фазирующей функции A запоминают, для каждого выбранного азимутально-угломестного направления приема преобразуют рассеянный сигнал s в сигналы компонент комплексного частотно-временного изображения h(0),h=(AHA)-1AHsh и h(0),v=(AHA)-1AHsv, где AH - матрица, эрмитово сопряженная с A, сигналы компонент h(0),h и h(0),v запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал  ,
,  и
и  - z-е элементы компонент h(k-1),h и h(k-1),v, k=1, 2, … - номер итерации, и сигналы очередного приближения компонент комплексного частотно-временного изображения h(k),h=[AHA+λΛ(h(k-l),h, h(k-1),v)]-lAHsh и h(k),v=[AHA+λΛ(h(k-1),h, h(k-1),v)]-lAHsv, где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения
- z-е элементы компонент h(k-1),h и h(k-1),v, k=1, 2, … - номер итерации, и сигналы очередного приближения компонент комплексного частотно-временного изображения h(k),h=[AHA+λΛ(h(k-l),h, h(k-1),v)]-lAHsh и h(k),v=[AHA+λΛ(h(k-1),h, h(k-1),v)]-lAHsv, где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения  , после чего по локальным максимумам суммы квадратов модулей элементов компонент текущего частотно-временного изображения
, после чего по локальным максимумам суммы квадратов модулей элементов компонент текущего частотно-временного изображения  определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига и азимутально-угломестного направления приема - выполняют обнаружение и пространственную локализацию подвижных объектов.
Операции способа поясняются чертежами:
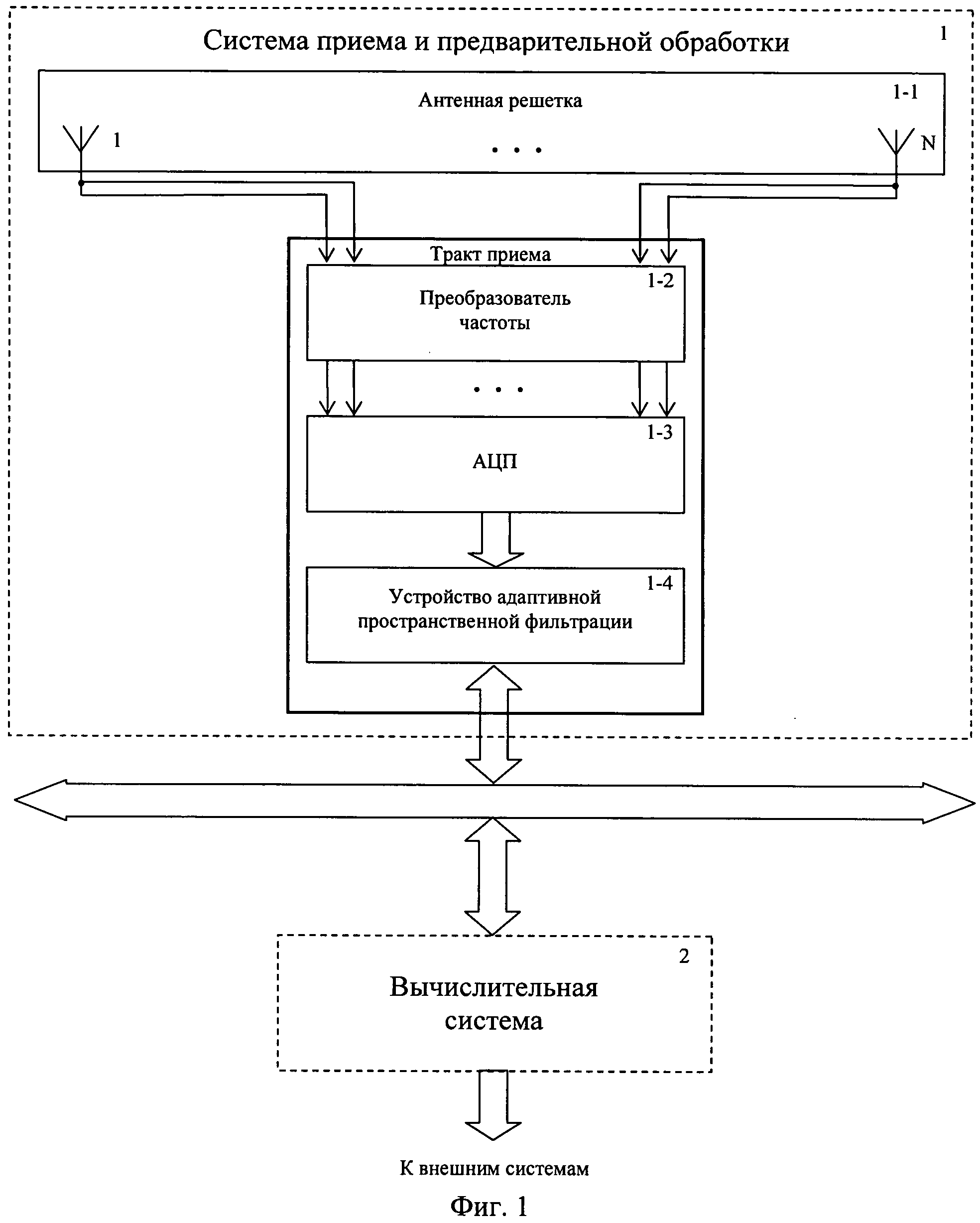
фиг.1 - структурная схема устройства поляризационно-чувствительного поиска малоразмерных подвижных объектов;
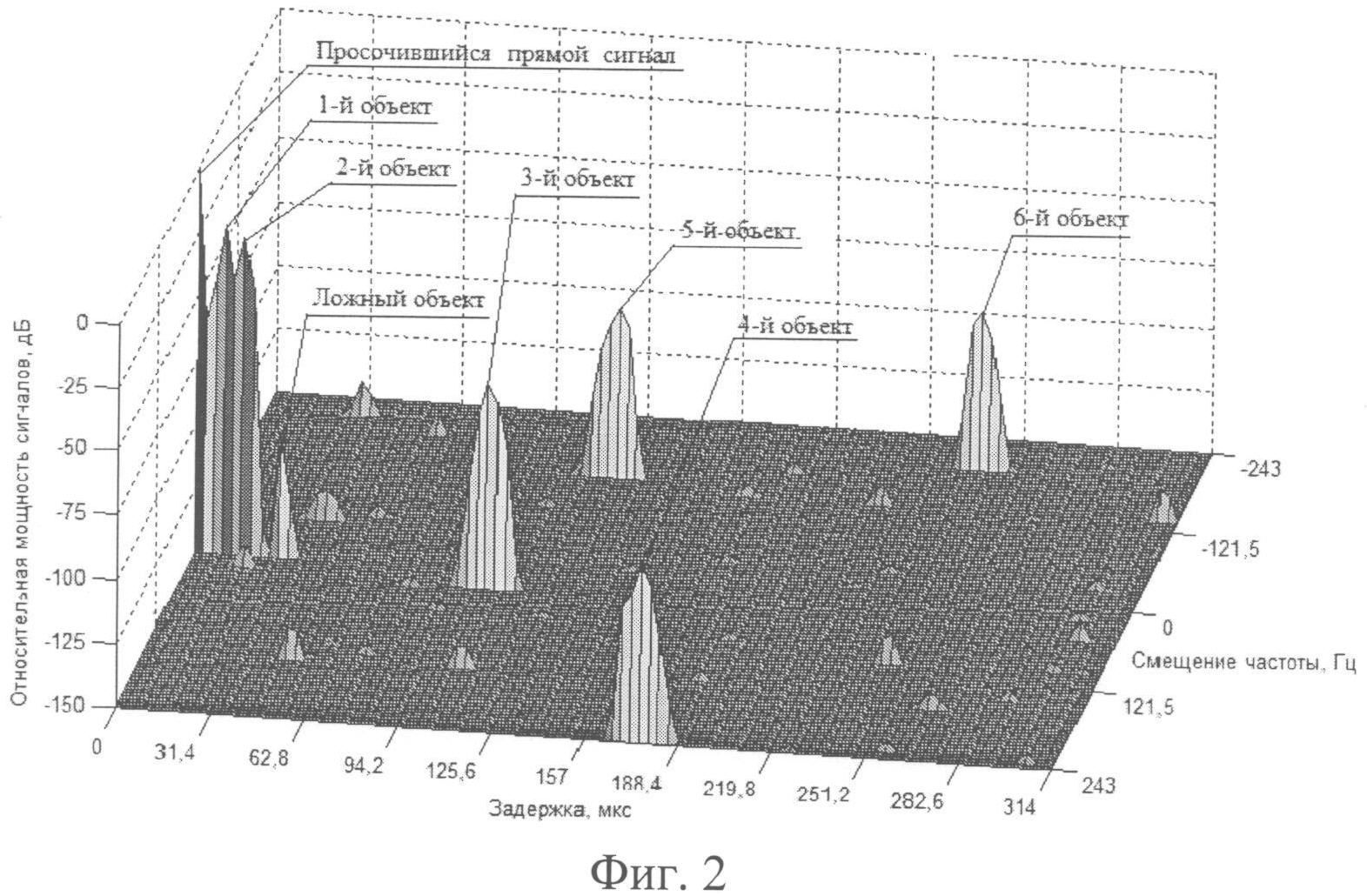
фиг.2 - результаты моделирования процесса поляризационно-чувствительного обнаружения и частотно-временной локализации малоразмерных подвижных объектов предложенным способом;
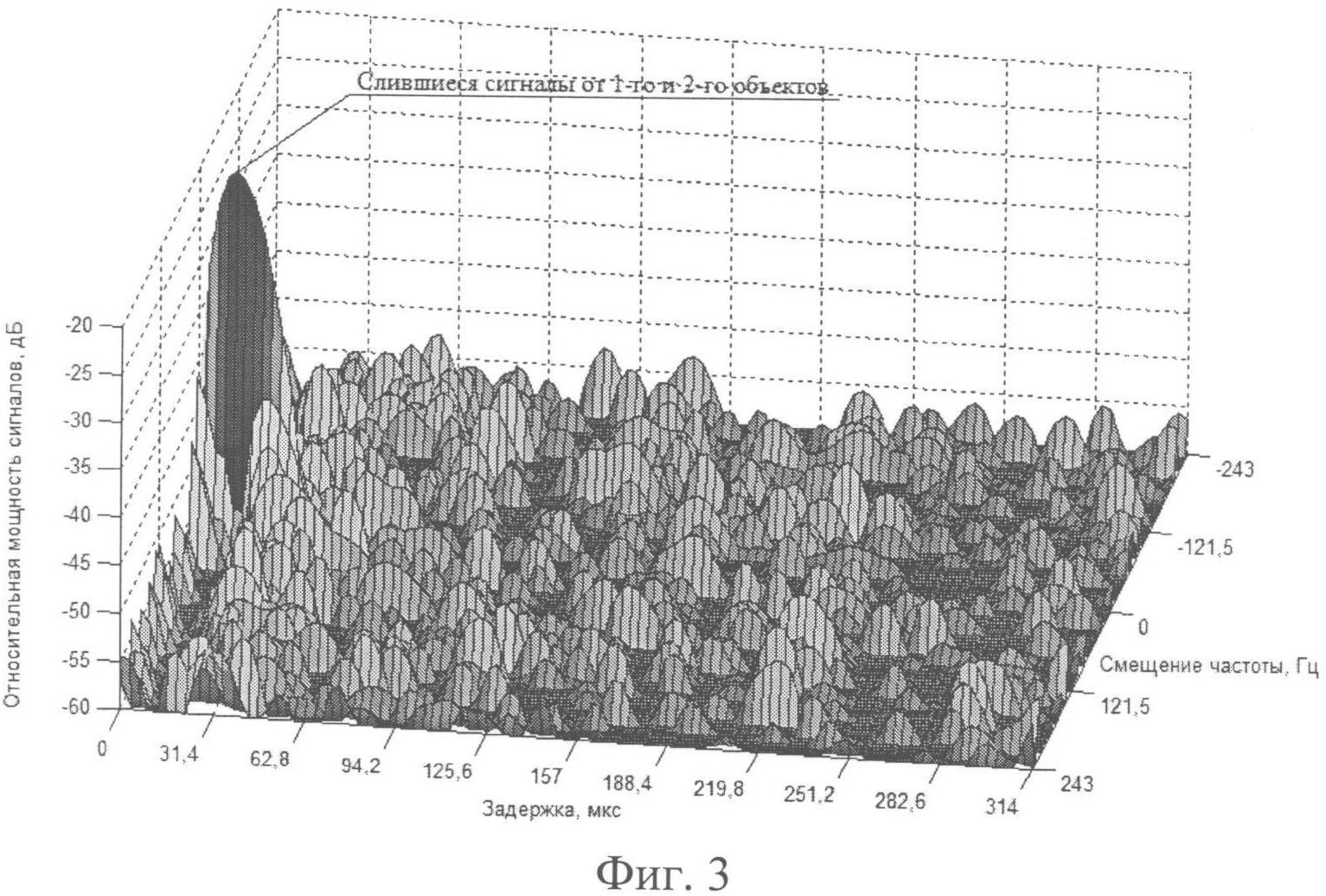
фиг.3 - результаты моделирования процесса поляризационно-чувствительного обнаружения и частотно-временной локализации малоразмерных подвижных объектов при использовании способа-прототипа.
Для оценки сравнительной эффективности предложенного способа выполнено моделирование на ПЭВМ.
При моделировании использовались полунатурные данные, построенные на основе измеренного с частотой дискретизации 318785 Гц сигнала звукового сопровождения 49 канала аналогового телевидения. Длина последовательности анализируемого сигнала равнялась 65536 отсчетам.
Измеренный сигнал использовался в качестве прямого сигнала. Он же с добавкой белого шума с уровнем минус 30 дБ и уменьшенных по амплитуде, задержанных по времени и сдвинутых по Доплеру копий измеренного сигнала использовался в качестве разведываемого сигнала. Рассматриваемый сценарий включал прямой сигнал передатчика подсвета и сигналы, рассеиваемые шестью объектами. Первые два объекта стационарные, а остальные подвижные. Уровни сигналов стационарных объектов на 20 дБ ниже уровня прямого сигнала, а уровни сигналов остальных объектов в среднем ниже на 60 дБ.
Размеры координатной сетки задержка-доплеровский сдвиг выбирались равными 101×101, шаг по задержке 3.1369 мкс, по доплеровскому сдвигу 4.8643 Гц.
На фиг.2 и фиг.3 представлены частотно-временные изображения рассеянных объектами радиосигналов, сформированные предложенным способом и способом-прототипом соответственно.
Из сравнения этих изображений следует, что предложенный способ обеспечивает обнаружение и частотно-временную локализацию сигналов от всех шести объектов. В тоже время способ-прототип обеспечивает обнаружение только слившихся сигналов от первого и второго объектов.
Устройство (фиг.1), в котором реализуется предложенный способ, содержит последовательно соединенные систему приема и предварительной обработки 1 и вычислительную систему 2.
В свою очередь система приема и предварительной обработки 1 включает антенную решетку 1-1, тракт приема прямых и рассеянных сигналов, включающий преобразователь частоты 1-2, АЦП 1-3 и устройство адаптивной пространственной фильтрации 1-4.
При этом система 2 имеет выход, предназначенный для подключения к внешним системам.
Система 1 является аналогово-цифровым устройством и предназначена для адаптивной пространственной фильтрации полезных прямых и рассеянных объектами радиосигналов.
Антенная решетка 1-1 состоит из N антенн с номерами  . Каждая антенна обеспечивает одновременный ненаправленный или направленный прием двух скалярных полей - ортогональных составляющих поляризованной волны в точке приема, и имеет два отдельных выхода для радиосигналов горизонтальной (h) и вертикальной (v) поляризаций.
. Каждая антенна обеспечивает одновременный ненаправленный или направленный прием двух скалярных полей - ортогональных составляющих поляризованной волны в точке приема, и имеет два отдельных выхода для радиосигналов горизонтальной (h) и вертикальной (v) поляризаций.
Пространственная конфигурация антенной решетки может быть произвольной: плоской прямоугольной, плоской кольцевой или объемной, в частности, конформной.
Преобразователь частоты 1-2 является 2N-канальным, выполнен с общим гетеродином и с полосой пропускания каждого канала, изменяемой в соответствии с шириной спектра принимаемого радиосигнала. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов.
АЦП 1-3 также является 2N-канальным и синхронизирован сигналом одного опорного генератора (для упрощения опорный генератор на схеме не показан). Если разрядность и быстродействие АЦП достаточны для непосредственного аналого-цифрового преобразования входных сигналов, то вместо преобразователя частоты 1-2 могут использоваться частотно избирательные полосовые фильтры и усилители. Кроме этого преобразователь частоты 1-2 обеспечивает подключение одной из антенн вместо всех антенн решетки для периодической калибровки приемных каналов по внешнему источнику сигнала. Возможна калибровка с использованием внутреннего генератора, выход которого также подключается вместо всех антенн для периодической калибровки каналов (для упрощения внутренний генератор на схеме не показан).
Устройство адаптивной пространственной фильтрации 1-4 представляет собой вычислительное устройство.
Вычислительная система 2 предназначена для итерационного формирования двухкомпонентного сигнала комплексного частотно-временного изображения радиосигналов, рассеянных объектами в анализируемой области доплеровских частот и временных задержек, а также обнаружения и пространственной локализации подвижных объектов.
Устройство работает следующим образом.
В системе 2 на основе данных от внешних систем идентифицируется, выбирается и периодически обновляется совокупность передатчиков, излучающих радиосигналы с расширенным спектром.
Параметры выбранного множества передатчиков (номер, несущая частота, ширина спектра, форма, параметры синхронизации и мощность излучаемого сигнала, координаты или расстояние и угловое положение относительно точки приема) запоминаются в системе 2, а также используются для настройки преобразователя 1-2. С целью упрощения цепи управления преобразователем не показаны.
Преобразователь частоты 1-2 по сигналам системы 2 перестраивается на заданную частоту приема.
Принятое каждой антенной с номером n решетки 1-1 векторное многолучевое электромагнитное поле прямого и рассеянных радиосигналов в виде зависящих от времени t радиосигналов горизонтальной  и вертикальной
и вертикальной  поляризаций поступает на входы преобразователя частоты 1-2.
поляризаций поступает на входы преобразователя частоты 1-2.
В преобразователе частоты 1-2 каждый принятый радиосигнал  и
и  фильтруется по частоте и переносится на более низкую частоту.
фильтруется по частоте и переносится на более низкую частоту.
Сформированный в преобразователе 1-2 ансамбль радиосигналов  и
и  синхронно преобразуется с помощью АЦП 1-3 в цифровые сигналы
синхронно преобразуется с помощью АЦП 1-3 в цифровые сигналы  и
и  , где i - номер временного отсчета сигнала, которые поступают в устройство 1-4, где запоминаются.
, где i - номер временного отсчета сигнала, которые поступают в устройство 1-4, где запоминаются.
В устройстве 1-4 цифровые сигналы преобразуются в двухкомпонентный прямой сигнал  и двухкомпонентные рассеянные сигналы
и двухкомпонентные рассеянные сигналы  для выбранных азимутально-угломестных направлений приема, где h и v - индексы компонент горизонтальной и вертикальной поляризации.
для выбранных азимутально-угломестных направлений приема, где h и v - индексы компонент горизонтальной и вертикальной поляризации.
Преобразование цифровых сигналов в двухкомпонентный прямой сигнал  и двухкомпонентные рассеянные сигналы s для выбранных азимутально-угломестных направлений приема осуществляется известными способами адаптивной пространственной фильтрации [3].
и двухкомпонентные рассеянные сигналы s для выбранных азимутально-угломестных направлений приема осуществляется известными способами адаптивной пространственной фильтрации [3].
При этом, например, из цифровых сигналов горизонтальной поляризации  формируется сигнал пространственной корреляционной матрицы входных сигналов R. Сигнал корреляционной матрицы R преобразуется в сигнал оптимального весового вектора для формирования прямого w=R-1η сигнала, где η - вектор наведения, определяемый азимутально-угломестным направлением приема прямого радиосигнала, длиной волны (частотой fk) и геометрией решетки.
формируется сигнал пространственной корреляционной матрицы входных сигналов R. Сигнал корреляционной матрицы R преобразуется в сигнал оптимального весового вектора для формирования прямого w=R-1η сигнала, где η - вектор наведения, определяемый азимутально-угломестным направлением приема прямого радиосигнала, длиной волны (частотой fk) и геометрией решетки.
После этого цифровые сигналы  объединяются в матричный цифровой сигнал X, преобразованием которого формируется сигнал sh=wHX, являющийся векторным сигналом компоненты горизонтальной поляризации прямого сигнала
объединяются в матричный цифровой сигнал X, преобразованием которого формируется сигнал sh=wHX, являющийся векторным сигналом компоненты горизонтальной поляризации прямого сигнала  , где
, где  - означает транспонирование, I - число временных отсчетов сигнала, принятого в выбранном азимутально-угломестном направлении.
- означает транспонирование, I - число временных отсчетов сигнала, принятого в выбранном азимутально-угломестном направлении.
Аналогично осуществляется формирование компоненты вертикальной поляризации прямого сигнала  , а также компонент sh и sv рассеянных сигналов для выбранных азимутально-угломестных направлений приема.
, а также компонент sh и sv рассеянных сигналов для выбранных азимутально-угломестных направлений приема.
Физически описанные операции адаптивной пространственной фильтрации обеспечивают одновременный направленный прием с заданных направлений двух компонент полезного прямого сигнала выбранного передатчика подсвета и двух компонент полезного рассеянного сигнала с одновременным подавлением широкого класса помех, приходящих с других направлений.
Полученные двухкомпонентные сигналы совместно со значением азимутально-угломестного направления приема поступают в вычислительную систему 2, где запоминаются.
В вычислительной системе 2 выполняются следующие действия:
- вычисляется и сравнивается энергия компонент  и
и  прямого сигнала;
прямого сигнала;
- выбирается компонента прямого сигнала с максимальной энергией  ;
;
- преобразуется компонента прямого сигнала с максимальной энергией  в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом.
в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом.
Преобразование компонент прямого сигнала с максимальной энергией
в матричный сигнал A осуществляется по следующей формуле:  , где
, где  - векторы размером I×1, являющиеся сдвинутыми по времени на qTs версиями прямого сигнала
- векторы размером I×1, являющиеся сдвинутыми по времени на qTs версиями прямого сигнала  , q=0, …, Q-1, Q - число временных задержек прямого сигнала, Ts - период выборки сигнала;
, q=0, …, Q-1, Q - число временных задержек прямого сигнала, Ts - период выборки сигнала;
D=[D-L,…,D-ℓ,…,D0,…,D+ℓ,…,D+L], 
- матрицы доплеровских сдвигов, ℓ=0, …, ±L, L - размер координатной сетки по доплеровскому сдвигу. Размеры матриц Dℓ и D соответственно равны I×I и I×I(2L+1).
Таким образом, столбцы матрицы А представляют собой задержанные по времени и сдвинутые по частоте доплеровского сдвига версии прямого сигнала
, а размер этой матрицы I×Q(2L+1) определяется числом отсчетов в разведываемом сигнале (длительностью интервала наблюдения) и размерами координатной сетки по временному запаздыванию и доплеровскому сдвигу частоты;
- матричный сигнал комплексной фазирующей функции А запоминается.
После этого в вычислительной системе 2 для каждого выбранного азимутально-угломестного направления приема выполняются следующие действия:
- рассеянный сигнал s преобразуется в сигналы компонент комплексного частотно-временного изображения h(0),h=(AHA)-1AHsh и h(0),v=(AHA)-1AHsv, где AH - матрица, эрмитово сопряженная с A;
- сигналы компонент h(0),h и h(0),v запоминают и используют в качестве начального приближения;
- итерационно формируются зависящий от предыдущего решения вспомогательный матричный сигнал  , где
, где  и
и  - z-e элементы компонент h(k-1),h и h(k-1),v, k=1, 2, … - номер итерации, и сигналы очередного приближения компонент комплексного частотно-временного изображения h(k),h=[AHA+λΛ(h(k-1),h,h(k-1),v)]-1AHsh и h(k),v=[AHA+λΛ(h(k-1),h,h(k-1),v)]-1AHsv, где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения
- z-e элементы компонент h(k-1),h и h(k-1),v, k=1, 2, … - номер итерации, и сигналы очередного приближения компонент комплексного частотно-временного изображения h(k),h=[AHA+λΛ(h(k-1),h,h(k-1),v)]-1AHsh и h(k),v=[AHA+λΛ(h(k-1),h,h(k-1),v)]-1AHsv, где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения  ;
;
- по локальным максимумам суммы квадратов модулей элементов компонент текущего частотно-временного изображения  определяется число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига и азимутально-угломестного направления приема - выполняется обнаружение и пространственная локализация подвижных объектов.
определяется число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига и азимутально-угломестного направления приема - выполняется обнаружение и пространственная локализация подвижных объектов.
При этом выполняются следующие действия:
- сравниваются с порогом значения доплеровского сдвига каждого рассеянного сигнала и при превышении порога принимается решение об обнаружении подвижного объекта в анализируемом азимутально-угломестном направлении приема.
Порог выбирается исходя из минимизации вероятности пропуска объекта.
При определении географических координат обнаруженного подвижного объекта в вычислительной системе 2 выполняются следующие действия:
- по значению временной задержки сигнала τ определяется кажущаяся дальность до объекта D=τс, где с - скорость света;
- определяются пространственные координаты обнаруженного объекта по кажущейся дальности D и значениям азимута α и угла места β приема рассеянных сигналов, например, в соответствии с [4].
При этом для пары «устройство поиска - передатчик» строится эллипсоид равных кажущихся дальностей, соответствующих геометрическому месту точек в пространстве, сумма расстояний до которых (от передатчика до объекта и от объекта до устройства обнаружения) равна найденному значению кажущейся дальности D. По пересечению эллипсоида и значения направления (азимут и угол места) приема рассеянных сигналов определяются географические координаты обнаруженного объекта.
Результаты обнаружения и пространственной локализации воздушных объектов отображаются для повышения информативности.
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает повышение вероятности поиска малоразмерных (как правило, слабо рассеивающих) объектов благодаря применению новых операций адаптивной обработки с обратной связью по полезному радиосигналу.
Таким образом, за счет применения новых операций адаптивной обработки с обратной связью по полезному радиосигналу, обеспечивающих повышение чувствительности и динамического диапазона при формировании компонент горизонтальной и вертикальной поляризации двухкомпонентного частотно-временного изображения радиосигналов, рассеянных объектами в анализируемой области доплеровских частот (скоростей) и временных задержек (дальностей), удается решить поставленную задачу с достижением указанного технического результата.
Источники информации
1. RU, патент, 2158002, кл. G01S 13/14, 2000 г.
2. US, патент, 7304603 B2, кл. G01S 13/02, 2007 г.
3. Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. М.: Радио и связь. 2003 г.
4. RU, патент, 2444754 C15, кл. G01S 13/02, 2012 г.
Способ поляризационно-чувствительного поиска малоразмерных подвижных объектов, заключающийся в том, что используют прямые и рассеянные подвижными объектами радиосигналы, излучаемые широкополосными передатчиками радиоэлектронных систем различного назначения, принимают решеткой из N антенн компоненты горизонтальной и вертикальной поляризации векторного многолучевого электромагнитного поля прямого и рассеянных радиосигналов, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы преобразуют в двухкомпонентные прямой и рассеянные сигналы для выбранных азимутально-угломестных направлений приема, где h и ν - индексы компонент горизонтальной и вертикальной поляризации, которые совместно со значением азимутально-угломестного направления приема запоминают, вычисляют и сравнивают энергию компонент и прямого сигнала, выбирают компоненту прямого сигнала с максимальной энергией , преобразуют компоненту прямого сигнала с максимальной энергией в матричный сигнал комплексной фазирующей функции А, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом, отличающийся тем, что матричный сигнал комплексной фазирующей функции А запоминают, для каждого выбранного азимутально-угломестного направления приема преобразуют рассеянный сигнал s в сигналы компонент комплексного частотно-временного изображения h=(AA)As и h=(AA)As, где А - матрица, эрмитово сопряженная с А, сигналы компонент h и h запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал , и - z-e элементы компонент h и h, k=1,2,… - номер итерации, и сигналы очередного приближения компонент комплексного частотно-временного изображения h=[AA+λΛ(h, h)]As и h=[AA+λΛ(h, h)]As, где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения , локальным максимумам суммы квадратов модулей элементов компонент текущего частотно-временного изображения определяют число рассеянных радиосигналов, по параметрам которых - значениям временной задержки, доплеровского сдвига и азимутально-угломестного направления приема - выполняют обнаружение и прос транственную локализацию подвижных объектов.





Способ пассивного обнаружения воздушных объектов
Способ приема сигналов в системах скрытной радиолокации
Способ пеленгования с повышенной разрешающей способностью
Способ скрытного обнаружения подвижных объектов
Способ обнаружения подвижных объектов
Способ обнаружения малоразмерных подвижных объектов
Способ обнаружения и пространственной локализации подвижных объектов
Способ поиска малозаметных подвижных объектов
Способ скрытной радиолокации подвижных объектов
Способ обнаружения малозаметных подвижных объектов
Способ пассивного обнаружения воздушных объектов
Способ приема сигналов в системах скрытной радиолокации
Способ пеленгования с повышенной разрешающей способностью
Способ скрытного обнаружения подвижных объектов
Способ обнаружения подвижных объектов
Способ обнаружения малоразмерных подвижных объектов
Способ обнаружения и пространственной локализации подвижных объектов
Способ поиска малозаметных подвижных объектов
Способ скрытной радиолокации подвижных объектов
Способ обнаружения малозаметных подвижных объектов

