Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ МАРШЕВЫМ ДВИГАТЕЛЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к системам управления двигателями беспилотных летательных аппаратов (БПЛА), запускаемых с авиационных носителей, в частности к способам и устройствам для управления тягой двигателей БПЛА, позволяющим обеспечивать заданную скорость или дальность полета.
Из уровня техники известен способ управления ракетным двигателем путем управления расходом топлива (RU, заявка №2011126277 от 28.06.2011), при этом заданные соотношения секундных расходов топлива поддерживают на основании непрерывной информации с датчиков уровней топлива в баках, обрабатывают полученную информацию и передают управляющие сигналы на органы регулирования. Недостатком данного способа является большой вес и габариты системы, необходимой для его реализации, недостаточно высокая достоверность результатов.
Из уровня техники известна система управления расходованием топлива ракетной двигательной установки (RU, заявка №2011126277 от 28.06.2011), состоящая из счетно-решающего устройства, реализующего алгоритм управления расходом топлива, а также формирующего управляющий сигнал через блок управления приводом системы на исполнительный орган системы. При этом в магистралях подачи и в топливном баке ракеты установлены, соответственно, датчики секундных расходов и датчики уровней топлива, а система содержит устройства, преобразующие сигналы с датчиков в цифровой код. Недостатком данного изобретения является большой вес системы из-за использования большого количества датчиков для измерения уровня и расхода топлива.
Из уровня техники известно устройство (WO 2009105038 от 18.02.2009, МПК F42C 15/00), предназначенное для управляемого снаряда, запускаемого с летательного аппарата и оценивающее скорость управляемого снаряда в полете. Данное устройство сравнивает реальную скорость снаряда в полете с расчетной скоростью и на основе полученных данных определяют момент поражения цели. Недостатком данного устройства является недостаточно высокая достоверность результатов.
Задачей предлагаемого изобретения является устранение указанных выше недостатков и создание способа управления маршевым двигателем БПЛА и устройства для его реализации.
Поставленная задача решается за счет того, что управление маршевым двигателем беспилотного летательного аппарата осуществляют следующим образом: перед пуском беспилотного летательного аппарата задают полетное задание с заданным временем выхода беспилотного летательного аппарата в заданную точку, после пуска рассчитывают начальное значение скорости V01, необходимое для выполнения полетного задания при заданном времени полета, принимают его за значение требуемой скорости V0ТРЕБ, с помощью средств измерения измеряют начальное значение реальной скорости летательного аппарата V0, сравнивают V0ТРЕБ с V0, по результатам сравнения V0ТРЕБ с V0 формируют управляющее воздействие на систему электронной регулировки двигателя, затем через равные промежутки времени повторяют последовательность операций: производят расчет скорости V1, необходимой для выполнения полетного задания при оставшемся времени полета и оставшемся расстоянии до цели, принимают его за значение требуемой скорости VТРЕБ, с помощью средств измерения измеряют значение текущей скорости летательного аппарата V, сравнивают VТРЕБ и V, по результатам сравнения VТРЕБ с V формируют управляющее воздействие на систему электронной регулировки двигателя до выполнения полетного задания.
Поставленная задача решается за счет того, что управление маршевым двигателем беспилотного летательного аппарата осуществляют следующим образом: перед пуском беспилотного летательного аппарата задают полетное задание с заданной дальностью полета беспилотного летательного аппарата рассчитывают допустимый расход топлива и заданную скорость полета V0ТРЕБ, определяемую допустимым расходом имеющегося количества топлива, с помощью средств измерения измеряют начальное значение реальной скорости летательного аппарата V0, сравнивают V0ТРЕБ, с V0, по результатам сравнения V0ТРЕБ с V0 формируют управляющее воздействие на систему электронной регулировки двигателя, затем через равные промежутки времени повторяют следующую последовательность операций: измеряют остаток топлива, определяют оставшееся до цели расстояние, рассчитывают скорость VТРЕБ, определяемую оставшимся количеством топлива, измеряют реальную текущую скорость, сравнивая скорость VТРЕБ и V, формируют управляющее воздействие на систему электронной регулировки двигателя до выполнения полетного задания.
Поставленная задача решается за счет того, что устройство для управления маршевым двигателем беспилотного летательного аппарата включает в себя объект управления, двигатель, первый модуль расчета, первый, второй и третий модули переключения, первый, второй, третий и четвертый модули суммировании, первый и второй модули интегрирования, модуль усиления, модуль расчета коэффициента передачи, модуль ограничения управляющего сигнала, модуль определения текущего расхода топлива, модуль расчета располагаемого текущего расхода, модуль формирования управляющего сигнала, при этом выход первого модуля расчета соединен с входом первого модуля переключения, выход первого модуля переключения соединен с первым входом первого модуля суммирования, выход первого модуля суммирования соединен с первым входом второго модуля переключения, выход второго модуля переключения соединен с входом первого модуля интегрирования и первым входом второго модуля суммирования, выход первого модуля интегрирования соединен с вторым входом второго модуля суммирования, выход второго модуля суммирования соединен с входом модуля усиления, выход модуля усиления соединен с первым входом третьего модуля суммирования, выход третьего модуля суммирования соединен со входом модуля расчета коэффициента передачи, выход модуля расчета коэффициента передачи соединен со входом второго модуля интегрирования, выход второго модуля интегрирования соединен со входом модуля ограничения управляющего сигнала, первый и второй выходы модуля ограничения управляющего сигнала соединены, соответственно, с входом третьего модуля переключения и вторым входом третьего модуля суммирования, выход третьего модуля переключения соединен с входом модуля определения текущего расхода топлива, первый и второй выходы модуля определения текущего расхода топлива соединены, соответственно, со вторым входом четвертого модуля суммирования и входом двигателя, выход двигателя соединен с входом объекта управления, выход объекта управления соединен со вторым входом первого модуля суммирования, выход модуля расчета располагаемого текущего расхода соединен с первым входом четвертого модуля суммирования, выход четвертого модуля суммирования соединен с входом модуля формирования управляющего сигнала, выход модуля формирования управляющего сигнала соединен со вторым входом второго модуля переключения.
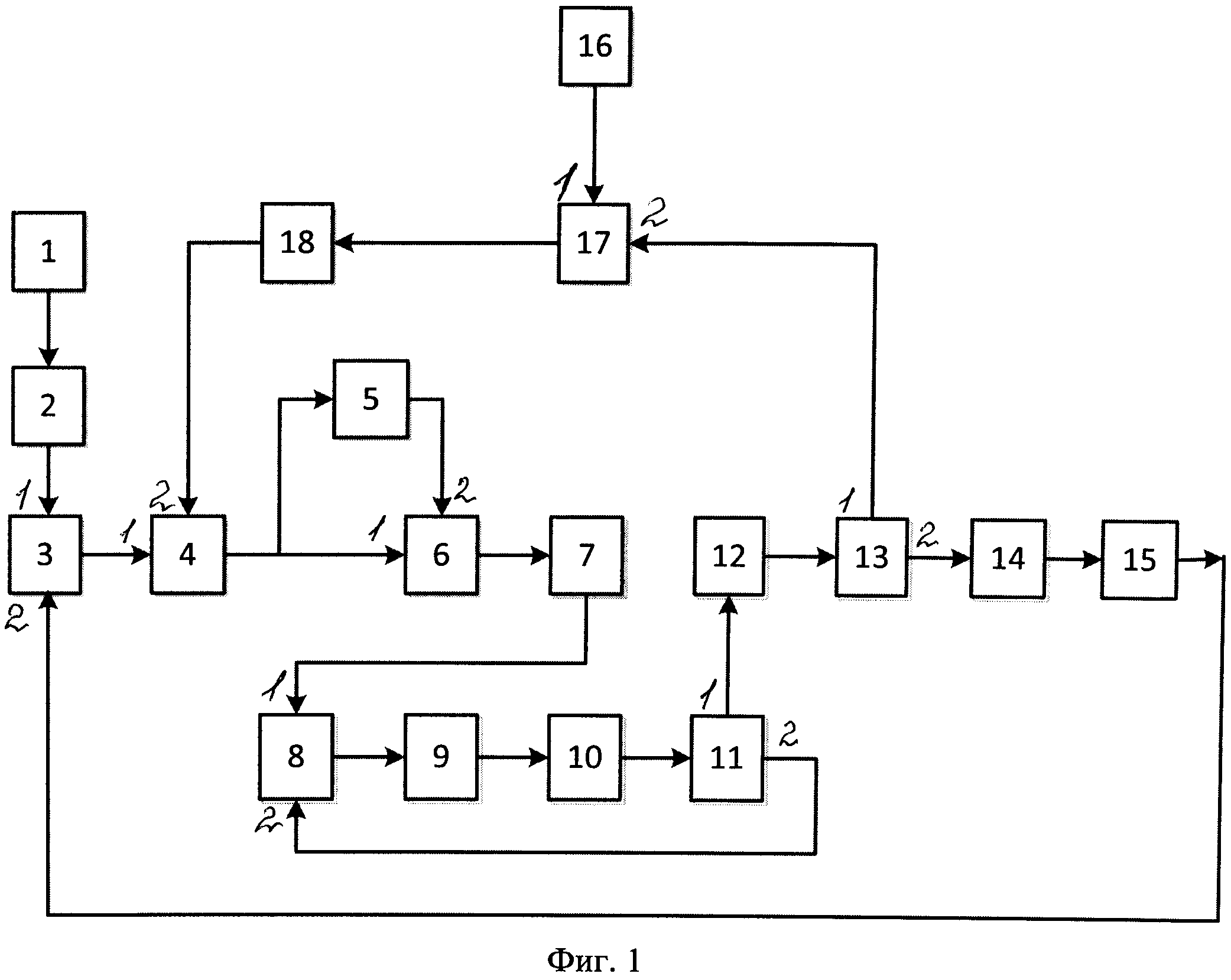
Сущность изобретения поясняется фиг. 1, на которой представлен вариант структурной схемы устройства для управления маршевым двигателем беспилотного летательного аппарата.
На фиг. 1 обозначены:
1 - первый модуль расчета;
2 - первый модуль переключения;
3 - первый модуль суммирования;
4 - второй модуль переключения;
5 - первый модуль интегрирования;
6 - второй модуль суммирования;
7 - модуль усиления;
8 - третий модуль суммирования;
9 - модуль расчета коэффициента передачи;
10 - второй модуль интегрирования;
11 - модуль ограничения управляющего сигнала;
12 - третий модуль переключения;
13 - модуль определения текущего расхода топлива;
14 - двигатель;
15 - объект управления (БПЛА);
16 - модуль расчета располагаемого текущего расхода;
17 - четвертый модуль суммирования;
18 - модуль формирования управляющего сигнала.
Предлагаемый способ заключается в том, что перед пуском БПЛА 15 задают полетное задание с заданным временем выхода БПЛА 15 в заданную точку. После пуска рассчитывают начальное значение скорости V01, необходимой для выполнения полетного задания при заданном времени полета и принимают его за значение требуемой скорости V0ТРЕБ. С помощью средств измерения, например акселерометров, измеряют начальное значение реальной скорости летательного аппарата V0, сравнивают V0ТРЕБ с V0, по результатам сравнения V0ТРЕБ с V0 формируют управляющее воздействие на систему электронной регулировки двигателя 14 и изменяют тягу двигателя 14, что, соответственно, вызывает изменение скорости полета.
Затем через равные промежутки времени повторяют последовательность операций: производят расчет скорости V1, необходимой для выполнения полетного задания при оставшемся времени полета и оставшемся расстоянии до цели, принимают его за значение требуемой скорости VТРЕБ, с помощью средств измерения измеряют значение текущей скорости летательного аппарата V, сравнивают VТРЕБ и V, по результатам сравнения VТРЕБ с V формируют управляющее воздействие на систему электронной регулировки двигателя 14 до выполнения полетного задания. Способ позволяет реализовать форсированный выход БПЛА на цель и реализовать одновременный выход нескольких БПЛА на цель.
Предлагаемый способ заключается в том, что перед пуском БПЛА 15 задают полетное задание с заданной дальностью полета БПЛА 15. С помощью инерциальной системы управления БПЛА 15 рассчитывают допустимый расход топлива и заданную скорость полета V0ТРЕБ, определяемую допустимым расходом имеющегося количества топлива. Начальное значение реальной скорости V01 БПЛА 15 может быть измерено с помощью средств измерения, например акселерометров, или может быть задано с носителя. Сравнивают V0ТРЕБ с V01, по результатам сравнения V0ТРЕБ с V01 формируют управляющее воздействие А на систему электронной регулировки двигателя. Через равные промежутки времени повторяют следующую последовательность операций: измеряют остаток топлива, определяют оставшееся до цели расстояние, рассчитывают скорость VТРЕБ, определяемую оставшимся количеством топлива, измеряют реальную текущую скорость V, формируют управляющее воздействие на систему электронной регулировки двигателя 14, изменяют тягу двигателя и так повторяют до выполнения полетного задания.
Способ позволяет учитывать наличие пунктов перемены маршрута, облет препятствий, наличие встречного ветра и другие факторы, а также возможность повторного захода на цель после пролета цели.
В одном из вариантов исполнения, представленном на фиг. 1, предлагаемое устройство состоит из первого модуля расчета 1, а также первого 2, второго 4 и третьего 12 модулей переключения, первого 3, второго 6, третьего 8 и четвертого 17 модулей суммирования, первого 5 и второго 10 модулей интегрирования, модуля усиления 7, модуля расчета коэффициента передачи 9, модуля ограничения управляющего сигнала 11, модуля определения текущего расхода топлива 13, двигателя 14, объекта управления 15, модуля расчета располагаемого текущего расхода 16 и модуля формирования управляющего сигнала 18.
Выход первого модуля расчета 1 соединен с входом первого модуля переключения 2, выход первого модуля переключения 2 соединен с первым входом первого модуля суммирования 3. Выход первого модуля суммирования 3 соединен с первым входом второго модуля переключения 4, выход второго модуля переключения 4 соединен с входом первого модуля интегрирования 5 и первым входом второго модуля суммирования 6.
Выход первого модуля интегрирования 5 соединен со вторым входом второго модуля суммирования 6, выход второго модуля суммирования 6 соединен с входом модуля усиления 7, выход модуля усиления 7 соединен с первым входом третьего модуля суммирования 8. Выход третьего модуля суммирования 8 соединен с входом модуля расчета коэффициента передачи 9, выход модуля расчета коэффициента передачи 9 соединен со входом второго модуля интегрирования 10, выход второго модуля интегрирования 10 соединен со входом модуля ограничения управляющего сигнала 11. Первый и второй выходы модуля ограничения управляющего сигнала 11 соединены, соответственно, с входом третьего модуля переключения 12 и вторым входом третьего модуля суммирования 8, выход третьего модуля переключения 12 соединен с входом модуля определения текущего расхода топлива 13. Первый и второй выходы модуля определения текущего расхода топлива 13 соединены, соответственно, со вторым входом четвертого модуля суммирования 17 и входом двигателя 14, при этом выход двигателя 14 соединен с входом объекта управления 15. Выход объекта управления 15 соединен со вторым входом первого модуля суммирования, выход модуля расчета располагаемого текущего расхода 16 соединен с первым входом четвертого модуля суммирования 17, выход четвертого модуля суммирования 17 соединен с входом модуля формирования управляющего сигнала 18, выход модуля формирования управляющего сигнала 18 соединен со вторым входом второго модуля переключения 4.
Первый модуль расчета 1 предназначен для расчета заданного значения скорости полета при выходе в заданную точку за заданное время ВРА. Первый модуль переключения 2 предназначен для выбора одного из двух режимов полета: с заданным временем (признак ВРА=1, Vзад=Увра) или без заданного времени (признак ВРА=0, Vзад=требуемому значению скорости).
Первый модуль суммирования 3 суммирует сигналы с объекта управления 15 и первого модуля переключения 2 (из скорости Vзад вычитает Vтек через определенные моменты времени).
Второй модуль переключения 4 предназначен для выбора режимов полета: с заданным временем выхода БПЛА в заданную точку или с заданной дальностью полета БПЛА (с заданным значением скорости с учетом допустимого расхода топлива).
Первый модуль интегрирования 5 ограничивает заданное значение скорости допустимым расходом топлива и по сигналу отклонения от заданного значения производит ограничение сигнала в цепи интеграла в диапазоне [Vsmin, Vsmax].
Второй модуль суммирования 6 суммирует сигналы с модулей 5 и 4.
Модуль усиления 7 усиливает сигнал с модуля 6 с коэффициентом Kv.
Третий модуль суммирования 8 суммирует сигналы с выходов модулей 7 и 11.
Модуль расчета коэффициента передачи 9 производит формирование сигнала Азад, управляющего тягой двигателя и ограничение скорости изменения управляющего сигнала.
Модуль интегратора 10 производит интегрирование скорости изменения управляющего сигнала.
Модуль ограничения управляющего сигнала 11 ограничивает величину управляющего сигнала в соответствии с заданными требованиями.
Модуль переключения режимов полета 12 переключает в режим с заданным значением управляющего тягой двигателя сигнала Азад или режим с программным значением управляющего тягой сигнала Апр.
Модуль определения текущего расхода топлива 13 определяет значение текущего расхода топлива Gт от СЭРД.
Модуль 14 - передаточная функция двигателя при воздействии управляющего сигнала.
Объект управления 15 может представлять беспилотный летательный аппарат, включающий в себя бесплатформенную инерциальную систему (БИНС) с датчиками линейных ускорений, дающих при интегрировании текущие значения скоростей.
Модуль расчета располагаемого текущего расхода 16 рассчитывает располагаемый текущий расход топлива, исходя из количества оставшегося топлива и расстояния до цели.
Модуль 17 суммирует сигналы с модулей 13 и 16.
Модуль формирования управляющего сигнала 18 формирует управляющий сигнал, подаваемый на вход регулятора скорости.
Рассмотрим работу устройства на примере работы схемы устройства, представленной на фиг. 1.
Перед пуском БПЛА рассчитывают несколько вариантов значений заданной скорости: необходимое для вывода БПЛА в заданное время в заданную точку; определяемое температурными условиями окружающей среды; определяемое из допустимого расхода имеющегося количества топлива.
В зависимости от поставленной задачи, указанной в полетном задании (вывод БПЛА в заданное время в заданную точку пространства, полет с пунктами перемены маршрута, полет на максимальную дальность, полет в условиях отрицательных температур, возможность повторного захода на цель в случае ее пролета), первый 2 и второй 4 модули переключения переключают цепи для получения нужного варианта заданной скорости. Через равные промежутки времени этот сигнал сравнивают с сигналом текущей реальной скорости полета БПЛА 15. По результатам сравнения сигналов в модуле 18 формируют управляющее воздействие на систему электронной регулировки двигателя 14 Азад и определяют скорость изменения управляющего сигнала. В зависимости от выполняемой задачи БПЛА 15 в текущий момент времени (фиксированный выход БПЛА 15 на цель, проход пункта перемены маршрута или повторный заход на цель) вместо расчетного сигнала Азад используют программное значение управляющего тягой двигателя сигнала Апр. Модуль переключения 12 соединяет цепь с требуемым управляющим сигналом (Азад или Апр), который воздействует на систему электронной регулировки двигателя 14 и изменяет тягу двигателя 14, что вызывает изменение текущей скорости полета БПЛА 15.
Предлагаемое устройство позволяет определять максимальную дальность полета при заданной скорости и различных температурных условиях окружающей среды, а также производить расчет возможности повторного захода на цель после промаха, при меньшем значении заданной скорости полета после пролета цели с сохранением форсированного режима управления на участке атаки цели. Предлагаемые способы и устройство позволяют выполнить задачи выхода в заданную точку за заданное время, а также сведение в строй нескольких БПЛА на участке атаки цели.
Техническим результатом является уменьшение веса и габаритов устройства и сокращение времени обработки данных, а также повышение достоверности полученных результатов, позволяющих регулировать расход топлива для выполнения полетного задания.
Представленные чертежи и описание устройства позволяют, используя существующую элементную базу, изготовить устройство и осуществить способ, что характеризует предлагаемое изобретение как промышленно применимое.
Способ проверки аппаратуры носителя с контролем линий связи и регистрацией информационного обмена
Способ имитации беспилотного летательного аппарата для отработки системы самонаведения при проведении летных испытаний
Двухстепенной динамический имитатор целей
Испытательный стенд
Ракета
Воздухозаборное устройство летательного аппарата
Радиоимитатор целей и способ его использования
Устройство для защиты радиоэлектронной аппаратуры от электромагнитного излучения
Способ имитации взаимодействия ракеты с аппаратурой носителей и устройство для его реализации
Модульный беспилотный летательный аппарат
Способ проверки аппаратуры носителя с контролем линий связи и регистрацией информационного обмена
Способ имитации беспилотного летательного аппарата для отработки системы самонаведения при проведении летных испытаний
Способ автоматизированного конфигурирования имитационных моделей беспилотных летательных аппаратов и устройство для его реализации
Способ параметрической оптимизации системы стабилизации летательного аппарата
Способ мобильной видеорегистрации и устройство для его осуществления
Двухстепенной динамический имитатор целей
Радиоимитатор целей и способ его использования
Устройство для защиты радиоэлектронной аппаратуры от электромагнитного излучения
Способ имитации взаимодействия ракеты с аппаратурой носителей и устройство для его реализации
Способ проведения испытаний ограничителя системы ликвидации беспилотного летательного аппарата и устройство для его осуществления

