Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЙ И ВОЛНОВЫХ ПРОЦЕССОВ В ОКЕАНЕ
Вид РИД
Изобретение
Настоящее предлагаемое изобретение относится к изучению океана. Известно устройство для регистрации микроперемещений морской воды, использующее ионную проводимость водной среды и содержащее электроды, соединенные с мостовыми схемами сравнения (1). Известное устройство имеет недостатки, которые заключаются в температурной нестабильности и невозможности работы в пресной воде.
Известен способ виузализации течения жидкости, заключающийся в оптической регистрации перемещения микрочастиц среды (2). Данный способ предназначен для исследования поверхностных течений жидкости и не применим для контроля глубинных процессов в океане.
Целью настоящего предложения является возможность исследования морских течений и регистрации инфранизкочастотных колебаний на любых глубинах и водах любой солености.
Поставленная цель в способе достигается тем, что в известном способе, заключающемся в оптической регистрации перемещения микрочастиц среды, регистрируют времена прохождения одной частицы между тремя точками, находящимися на одной линии на равном расстоянии друг от друга, и при их равенстве делают отсчет скорости. Волновые процессы в водной среде регистрируют путем выделения частотной модуляции импульсов, возникающих от выделенной частицы на датчиках ее прохождения. При этом находят среднее значение скорости и частотной модуляции от размеров частиц 2-5 и 20-50 микрон.
Поставленная цель в известном устройстве, содержащем оптические излучатель и регистратор, достигается тем, что оно выполнено в виде прямоугольного отрезка, открытого с торцов для воды, на одной стороне отрезка находится плоский оптический излучатель, а на противоположной стороне выполнены отверстия разного диаметра для оптических датчиков, при этом отверстия различного диаметра для частиц одного размера расположены на параллельных линиях, перпендикулярных торцам отрезка.
Кроме того, датчики частиц одного размера подключены через усилители-ограничители к устройству сравнения времени прихода импульсов относительно центральной точки, первый выход которого подключен к управляющему входу первого вычислительного устройства, входы которого соединены с каналами датчиков крайних точек, второй выход устройства сравнения подключен к частотному детектору.
Анализаторы сигналов датчиков частиц одного размера подключены ко второму вычислительному устройству, сравнивающему параметры скорости и частотной модуляции от сигналов частиц разных размеров.
Возможность реализации.
Известно, что вода в океане содержит взвесь частиц осадочного, биологического, геологического и пр. происхождения. Размер частиц (взвеси) от 0,5 до 50 микрон. При этом наблюдается два максимума числа частиц в 1 куб. сантиметре. Первый - в диапазоне 0,5-3 мкм, второй - 25-50 мкм. Все частицы непрозрачны для видимого спектра оптического излучения. Поскольку частицы взвешены в воде и однозначно отражают перемещение среды, имеет смысл использовать их для регистрации движения воды. Следует отметить, что даже в инфранизкочастотном диапазоне колебаний 1-10 Гц амплитуда перемещений в волне на уровне шума в океане (40 дБ) достигает нескольких микрон.
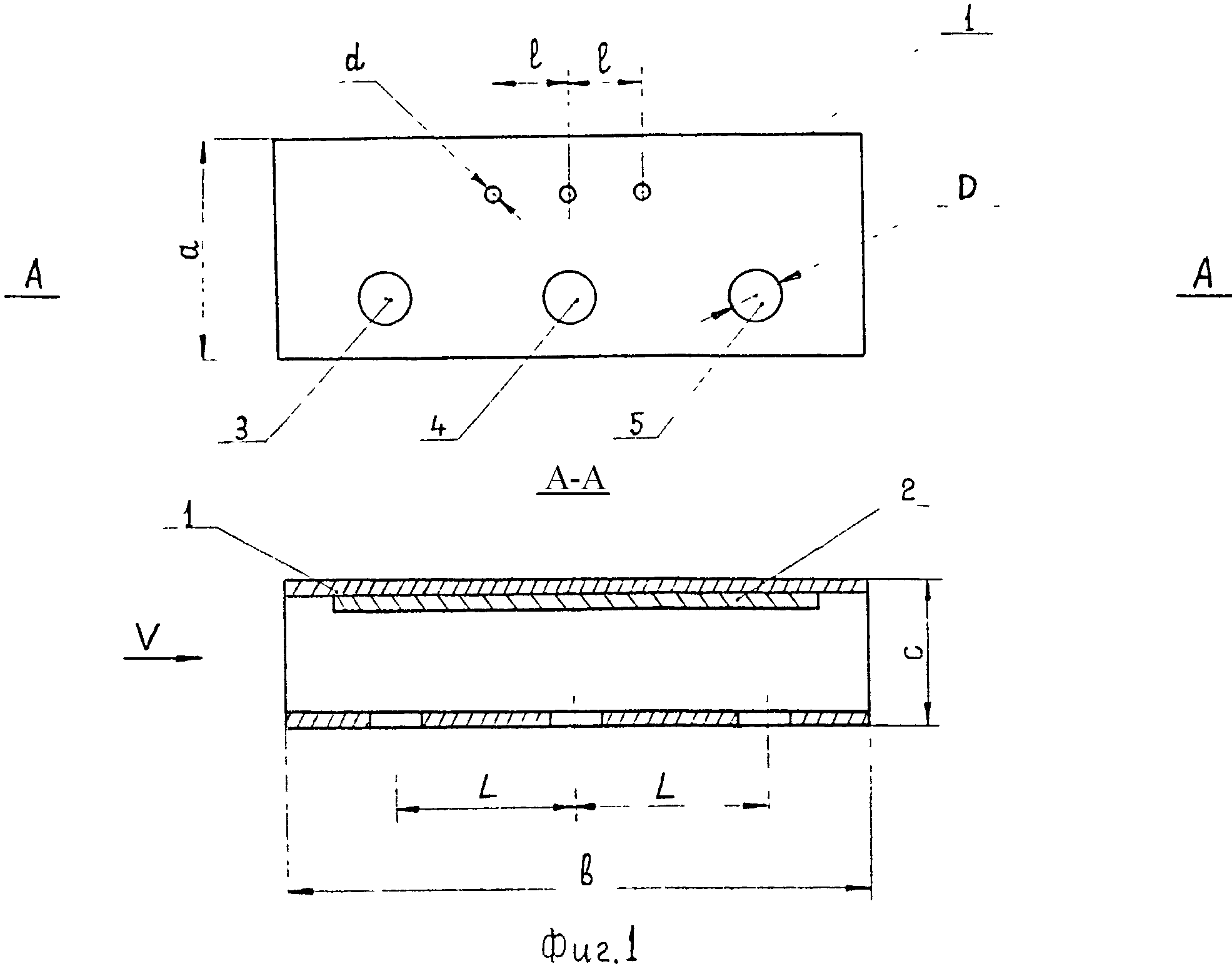
На фиг.1 показано устройство для измерения скорости течений и волновых процессов в океане, реализующее предложенный способ. Оно выполнено в виде прямоугольного отрезка из жесткого материала - 1, высотой а, шириной с и длиной в. На широкой (высотной) стороне находится плоский источник света - 2. На противоположной стороне отрезка находятся оптические датчики 3, 4 и 5 (в данном случае отверстия для них). Диаметр отверстий - D составляет 30 мкм. Эти отверстия служат для контроля движения частиц большого размера (20-50 мкм). Такая частица, оказавшись перед оптическим датчиком, перекрывает световой поток перед ним от источника света - 2, тем самым отмечая время ее прохождения первой точки 3. Под действием потока - V частица перемещается к точке (датчику) 4 и далее - к пятому. Расстояние между отверстиями 3, 4 и 5 одинаковое и составляет 100 мкм. При скорости потока, например, 10 см/с частица вызовет отклик датчиков в отверстиях 4 и 5 через 10 и 20 мс соответственно. Учитывая ламинарный поток в отрезке - 1, за такое время частица не сможет значительно отклониться от прямой линии перемещения.
Для создания условий ламинарности даже для частиц меньших (2-5 мкм) целесообразно выбрать размеры а - 3 мм, б - 10 мм и с - 1 мм. Стенки отрезка - 1 должны быть достаточно тонкими и иметь направляющие с обеих сторон. Внутри отрезка, на стороне расположения оптических датчиков, ее внутренняя поверхность должна быть абсолютно гладкой (полированной), чтобы не создавать препятствий движению микрочастиц.
В среднем количество взвеси (частиц) в океане составляет для размера 20-50 мкм - 50-500, для размера 2-5 мкм - 5-50 тысяч в одном куб.см. Исходя из того, что частица «перекрытия» потока света может находиться только в слое, соизмеримом с ее величиной, можно вычислить, что частота прохождения для больших частиц мимо датчика при взятой скорости 10 см/с составит 0,05 част./сек. Для малых частиц (2-5 мкм) частота прохождения мимо датчика(точки) тех же размеров составит 5 част./сек.
Поскольку в месте исследования может быть не известна структура взвеси, отрезок - 1 имеет ряд отверстий малого диаметра - d, величиной 3 мкм, расположенных на линии, параллельной линии больших отверстий, на расстоянии 1 мм от нее. Расстояние - l между ними - 10 мкм. При уже взятой скорости потока время прохождения между малыми отверстиями малой частицы составит 1 и 2 мс соответственно.
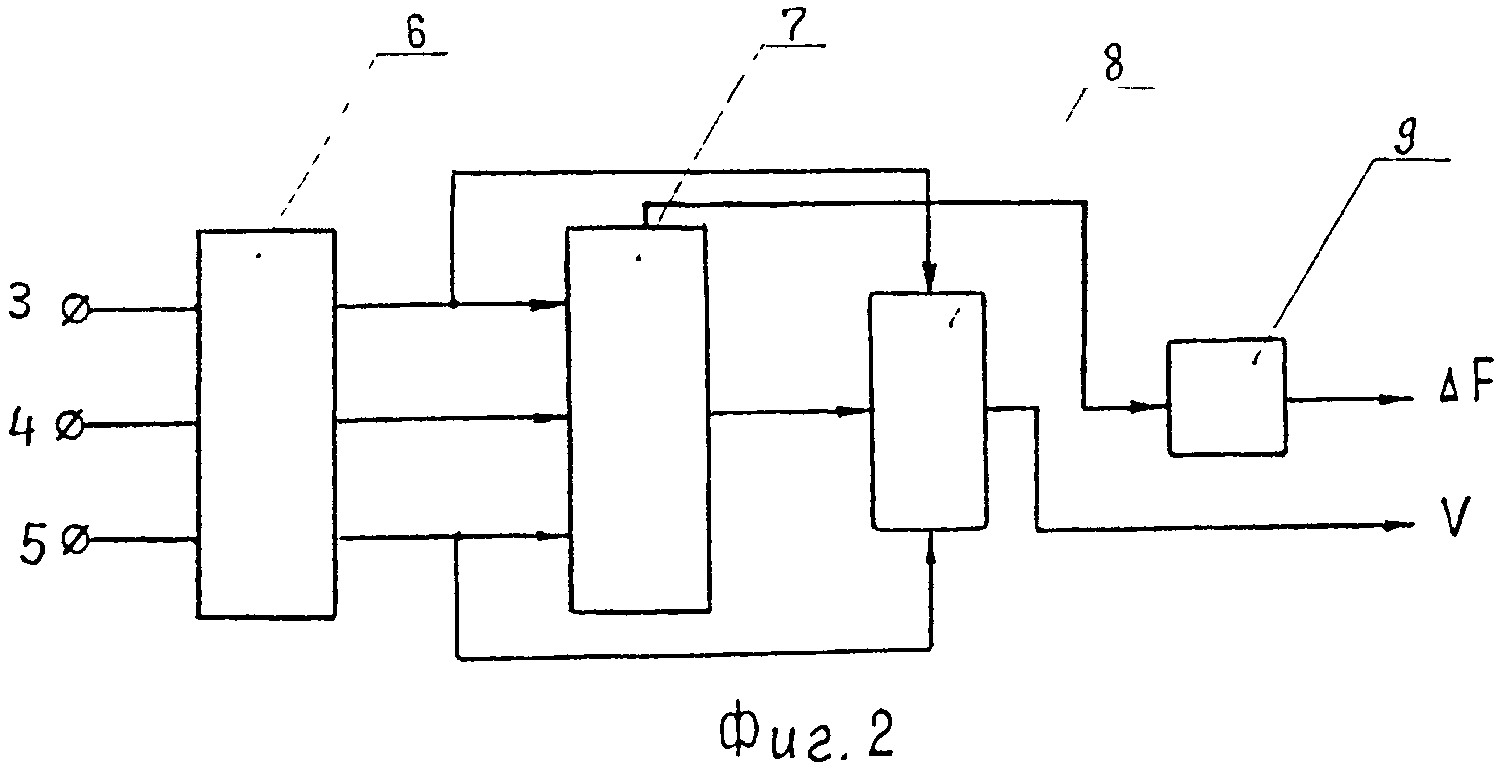
Из изложенного понятна работа анализатора скорости потока и волновых процессов в океане, блок-схема которого показана на фиг.2. Она содержит усилители-ограничители - 6, соединенные каждым каналом с устройством сравнения - 7, первый выход которого подключен ко входу управления первого вычислительного устройства - 8, а второй выход - к частотному детектору - 9.
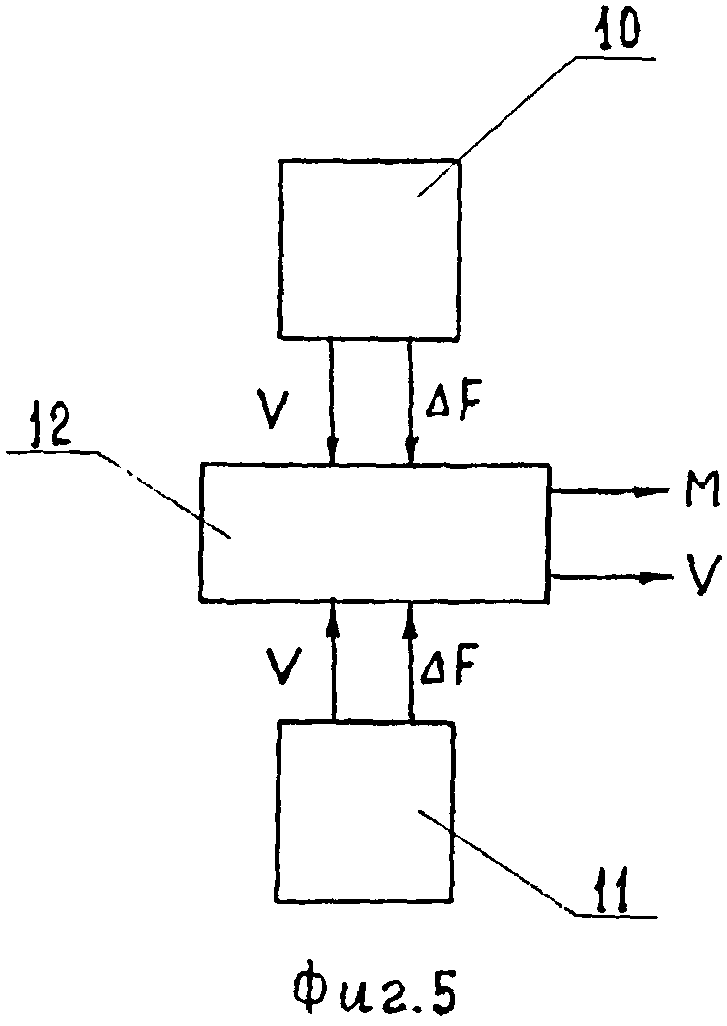
Анализатор работает следующим образом. Импульсы от оптических датчиков поступают на входы 3, 4, 5, обозначенные соответственно отверстиям, в которых они находятся на отрезке - 1. Сигнал на входах усилителя-ограничителя показан на фиг.3, на его выходах - на фиг.4. Ограничение происходит по уровню шумовых процессов. На фиг.3 - U огр. Импульсы на эпюрах соответствуют прохождению частицы мимо датчиков. Устройство сравнения 6 сравнивает времена прохождения частицы между точками 3-4 и 4-5, которые обозначены на фиг.4 временами Δt1 и Δt2. При равенстве этих времен (а они должны быть равны, поскольку отверстия 3, 4 и 5 находятся на равных расстояниях) устройство сравнения выдает сигнал на управляющий вход первого вычислительного устройства - 8, которое на выходе дает показание скорости потока, деля расстояние 2L на Δt1+Δt2. На вход частотного детектора - 9 поступает последовательность импульсов от каждого датчика линии прохождения частицы. И он выделяет изменение времени запаздывания (опережения) приходов импульсов, вызванное прохождением волны, частицы среды которой, как было отмечено ранее, также перемещаются в ее фронте.
Таким образом, на выходах анализатора образуются сигналы, отражающие скорость потока, где он установлен, и волновой процесс инфранизкочастотных колебаний, распространяющихся в воде.
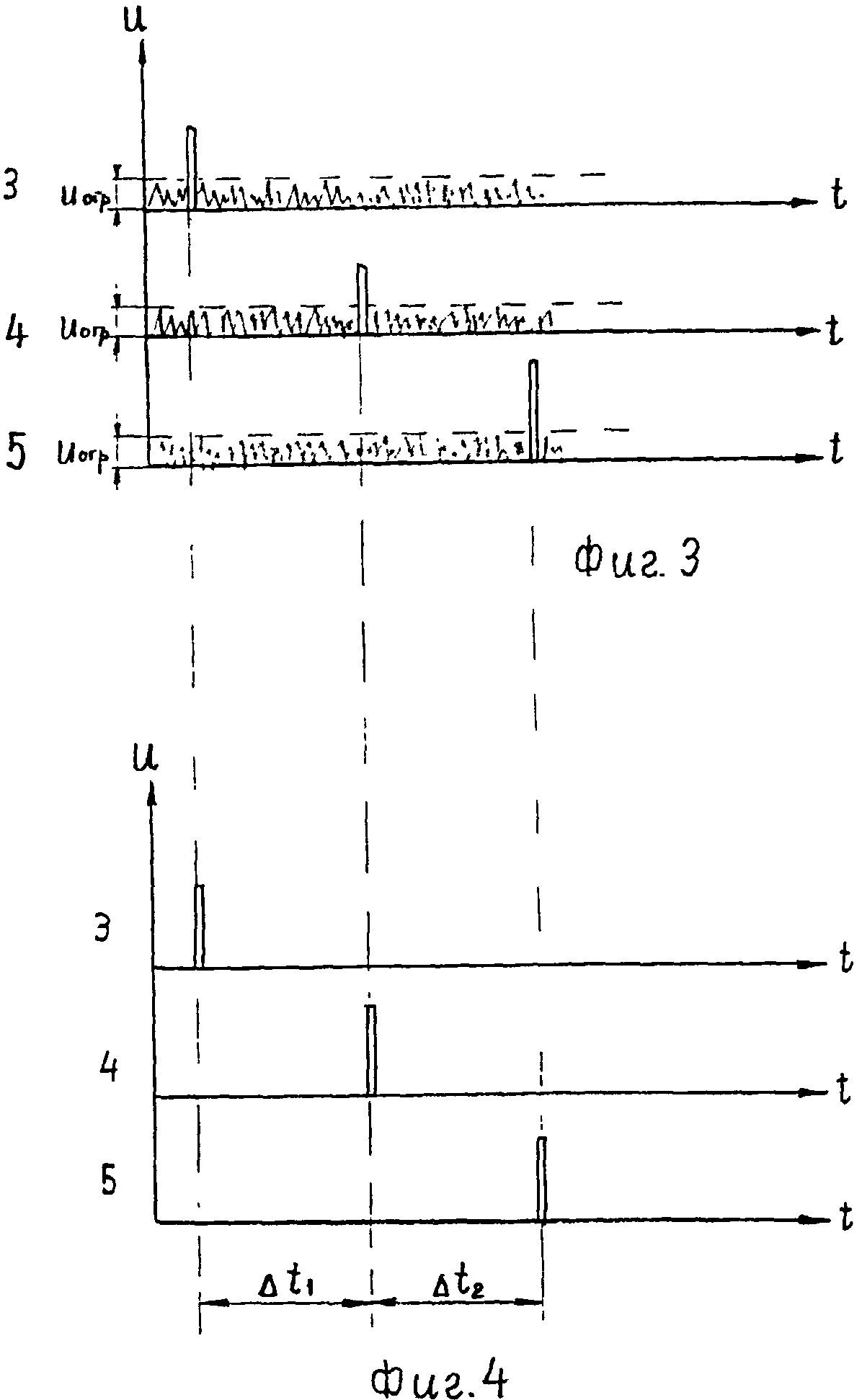
Для более надежного и точного фиксирования перечисленных процессов устройство, как уже отмечалось, имеет два набора датчиков, рассчитанных на контроль перемещения частиц разных размеров. Фиг.5 содержит дополнительную схему, на которой обозначены анализаторы крупных частиц - 10 и мелких - 11. Они подключены своими выходами ко второму вычислительному устройству - 12, которое, сравнивая сигналы от обоих анализаторов (а они, как понятно из изложенного ранее, должны быть одинаковы), дает надежную и точную информацию о скорости и волновых процессах в среде, где установлен датчик. Таким образом, на выходе V мы получаем сигнал значения скорости потока, а на выходе М (модуляция), сигнал, отражающий инфранизкочастотные колебания.
При этом, как уже отмечалось, ни уровень солености, ни температура на показания устройства не влияют. Тем самым предложенные способ и устройство достигают намеченной цели.
Источники информации
1. Патент России №2390784.
2. Патент России №2288476.
Способ изготовления эмалированных проводов
Способ получения концентрата сапропеля
Способ приготовления бетонной смеси
Способ пропитки обмоток электрических машин
Электроизоляционный лак и способ его нанесения на металлическую основу
Способ транспортировки нефти подо льдом и устройство для его реализации
Способ пропитки обмоток электротехнических изделий
Способ подводной добычи углеводородов и устройство для его осуществления
Устройство для исследования газовыделения на дне океана
Морской гидрофизический комплекс
Способ изготовления эмалированных проводов
Способ получения концентрата сапропеля
Способ приготовления бетонной смеси
Способ пропитки обмоток электрических машин
Электроизоляционный лак и способ его нанесения на металлическую основу
Способ транспортировки нефти подо льдом и устройство для его реализации
Способ пропитки обмоток электротехнических изделий
Способ подводной добычи углеводородов и устройство для его осуществления
Устройство для исследования газовыделения на дне океана
Морской гидрофизический комплекс

