Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области авиационного приборостроения и может быть использовано при определении курса летательного аппарата, измеряемого на его борту.
Курс относится к основным навигационным параметрам, измеряемым на борту самолетов и вертолетов. На борту современных летательных аппаратов (ЛА) для измерения курса, а также параметров крена и тангажа широкое применение нашли системы на основе гироскопических устройств - курсовые системы (КС), гировертикали (ГВ), курсовертикали (KB) и инерциальные навигационные системы (ИНС). С помощью гироскопических датчиков в составе KB и ИНС, которые могут быть платформенного или бесплатформенного типа, измеряют одновременно углы курса, крена и тангажа. Измерение курса, крена и тангажа с помощью гироскопических датчиков базируется на свойстве гироскопов или их аналогов сохранять неизменную ориентацию в пространстве или измерять угловую скорость изменения соответствующих параметров. Системы для измерения курса, а также крена и тангажа относятся к основным навигационным средствам на борту самолетов и вертолетов. От качества и надежности их работы во многом зависит эффективность применения этих ЛА. Поэтому в составе бортового оборудования ЛА всегда присутствуют в какой-либо комбинации системы измерения курса и крена, тангажа. Например, это могут быть одновременно КС и ГВ или KB, или ИНС. В силу важности параметра курса, в составе бортового оборудования ЛА, как правило, осуществляют дублирование канала его измерения. Однако в силу массогабаритных и экономических ограничений, в составе бортового оборудования многих ЛА не всегда представляется возможным осуществить дублирование канала измерения курса. Поэтому отказ канала измерения курса на таких ЛА приводит к существенному снижению эффективности применения ЛА.
Повышение надежности определения курса может быть осуществлено путем резервирования курсового канала за счет обработки сигналов от датчиков угловой скорости (ДУС), которые устанавливают на борту ЛА для решения других задач, например, для использования в контуре автоматического управления ЛА. В настоящее время в составе бортового оборудования ЛА широкое применение нашли спутниковые навигационные системы (СНС), обеспечивающие высокоточное измерение вектора скорости ЛА в географической системе координат.
Гироскопические датчики курса из состава КС, KB и ИНС, как правило, не достаточно точны и имеют увеличивающуюся погрешность.
Датчики угловой скорости, как правило, имеют повышенные погрешности и курс, полученный интегрированием скорости изменения курса, будет очень грубым.
На современных ЛА углы ориентации вектора скорости измеряются с помощью систем спутниковой навигации и доплеровских измерителей скорости и угла сноса (ДИСС) или многофункциональных радиолокационных систем (МФ РЛС) в режиме ДИСС. Достижимые требования к точностям для перспективных МФ РЛС в настоящее время соответствуют средним квадратическим ошибкам (СКО) измерений угла сноса 6-12 угл. мин (1,75-3,6 мрад) и модуля скорости 0,1-0,2 м/с [1].
Наиболее близким к изобретению является способ измерения курса летательного аппарата, заключающийся в измерениях с помощью гироскопических устройств углов курса, крена, тангажа, измерениях составляющих вектора угловой скорости по строительным осям ЛА, по которым в функции крена и тангажа определяют и затем интегрируют угловую скорость изменения курса, измерениях с помощью спутниковой навигационной системы составляющих вектора путевой скорости ЛА по осям географической системы координат, которые используют для определения угла ориентации вектора путевой скорости ЛА относительно географического меридиана, измерении с помощью доплеровского измерителя скорости составляющих вектора путевой скорости в связанной системе координат, по ним и по углам крена и тангажа определяют угол ориентации вектора путевой скорости относительно горизонтированной продольной оси ЛА, полученный сигнал компенсируют в угле ориентации вектора путевой скорости относительно географического меридиана, а затем разностный сигнал используют либо для коррекции сигналов курса, полученных прямым измерением и интегрированием угловой скорости изменения курса, либо непосредственно в качестве сигнала курса при отказе других систем измерения курса [2].
Недостатком известного способа является низкая точность определения углов ориентации вектора скорости ЛА относительно проекции продольной оси ЛА на горизонтальную плоскость, что не позволяет определять с требуемой точностью курс ЛА.
Технической задачей изобретения является повышение точности измерения курса летательного аппарата бортовыми средствами ОЭС переднего обзора.
Решение технической задачи или сущность изобретения заключается в том, что в способе измерения курса летательного аппарата (ЛА), основанном на измерениях с помощью гироскопических устройств углов курса, крена, тангажа, измерениях составляющих вектора угловой скорости по строительным осям ЛА, по которым в функции крена и тангажа определяют и затем интегрируют угловую скорость изменения курса, измерениях с помощью спутниковой навигационной системы (СНС) составляющих вектора путевой скорости ЛА по осям географической системы координат, которые используют для определения угла ориентации вектора путевой скорости ЛА относительно географического меридиана, компенсации угла сноса в угле ориентации вектора путевой скорости относительно географического меридиана, использовании разностного сигнала, полученного в результате компенсации, либо для коррекции сигналов курса, полученных прямым измерением и интегрированием угловой скорости изменения курса, либо непосредственно в качестве сигнала курса при отказе других систем измерения курса, дополнительно в системе переднего обзора измеряют углы ориентации относительно строительных осей ЛА гиростабилизированного поля зрения телевизионного (ТВ) или тепловизионного (ТП) датчика изображений (ДИ), в котором оптическое изображение формируется в фокальной плоскости и считывается матричными чувствительными элементами, выделяют по ТВ/ТП изображениям опорные точки на поверхности Земли для их дальнейшего сопровождения, фиксируют траектории перемещения изображений опорных точек по фокальной плоскости ДИ, сопровождая их на последовательности кадров и регистрируя их координаты, моменты времени формирования соответствующих кадров, углы ориентации поля зрения ДИ относительно строительных осей ЛА, показания датчиков ускорений и формируемые с помощью СНС и ИНС оценки составляющих вектора скорости по строительным осям ЛА в эти моменты времени, выделяют на траекториях пары одновременно формируемых участков, для каждой пары выделенных участков траекторий определяют координаты точки схождения как точки пересечения продолжений хорд, стягивающих эти участки, определяют параметры угловых положений линий визирования, проходящих через полученные точки схождения, и центр проекции, который используется в ДИ для формирования оптического изображения, находя тем самым направления векторов средних скоростей ЛА на интервалах времени формирования выделенных пар участков траекторий движения изображений опорных точек по фокальной плоскости, используя зарегистрированные данные, корректируют полученные направления векторов средних скоростей ЛА, приводя их к текущему моменту времени, определяют параметры углового положения вектора скорости ЛА в текущий момент времени относительно системы координат, связанной с полем зрения ДИ, как результат осреднения скорректированных параметров углового положения векторов средних скоростей ЛА, по найденным параметрам углового положения вектора скорости ЛА, углам ориентации поля зрения ДИ относительно строительных осей ЛА и углам крена и тангажа в текущий момент времени определяют углы, задающие направление полета относительно строительных осей ЛА и направление вектора путевой скорости ЛА относительно проекции продольной оси ЛА на горизонтальную плоскость (угол сноса).
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий.
1. В системе переднего обзора измеряют углы ориентации относительно строительных осей ЛА гиростабилизированного поля зрения телевизионного (ТВ) или тепловизионного (ТП) датчика изображений (ДИ), в котором оптическое изображение формируется в фокальной плоскости и считывается матричными чувствительными элементами.
2. Выделяют по ТВ/ТП изображениям опорные точки на поверхности Земли для их дальнейшего сопровождения, фиксируют траектории перемещения изображений опорных точек по фокальной плоскости ДИ, сопровождая их на последовательности кадров и регистрируя их координаты, моменты времени формирования соответствующих кадров, углы ориентации поля зрения ДИ относительно строительных осей ЛА, показания датчиков ускорений и формируемые с помощью СНС и ИНС оценки составляющих вектора скорости по строительным осям ЛА в эти моменты времени.
3. Выделяют на траекториях пары одновременно формируемых участков, для каждой пары выделенных участков траекторий определяют координаты точки схождения как точки пересечения продолжений хорд, стягивающих эти участки.
4. Определяют параметры угловых положений линий визирования, проходящих через полученные точки схождения, и центр проекции, который используется в ДИ для формирования оптического изображения, находя тем самым направления векторов средних скоростей ЛА на интервалах времени формирования выделенных пар участков траекторий движения изображений опорных точек по фокальной плоскости.
5. Используя зарегистрированные данные, корректируют полученные направления векторов средних скоростей ЛА, приводя их к текущему моменту времени, определяют параметры углового положения вектора скорости ЛА в текущий момент времени относительно системы координат, связанной с полем зрения ДИ, как результат осреднения скорректированных параметров углового положения векторов средних скоростей ЛА.
6. По найденным параметрам углового положения вектора скорости ЛА, углам ориентации поля зрения ДИ относительно строительных осей ЛА и углам крена и тангажа в текущий момент времени определяют углы, задающие направление полета относительно строительных осей ЛА и направление вектора путевой скорости ЛА относительно проекции продольной оси ЛА на горизонтальную плоскость (угол сноса).
Вышеуказанные отличительные признаки являются существенными, поскольку каждый в отдельности и все совместно направлены на решение поставленной задачи с достижением технического результата - повышение точности измерения курса летательного аппарата. Использование единой совокупности существенных отличительных признаков в известных технических решениях не обнаружено, что характеризует соответствие рассматриваемого технического решения критерию «новизна».
Изложенная выше совокупность новых существенных признаков в сочетании с общими известными обеспечивает решение поставленной задачи с достижением требуемого технического результата и характеризует предложенное техническое решение существенными отличиями по сравнению с известным уровнем техники.
Заявляемый способ является результатом научно-исследовательской и экспериментальной работы по повышению точности измерения курса летательного аппарата.
На фиг. 1 показано, как по данным о составляющих вектора скорости ЛА может быть определено направление вектора путевой скорости ЛА относительно проекции продольной оси ЛА на горизонтальную плоскость.
На фиг. 2 показано, что разность между углами направления вектора путевой скорости ЛА относительно географического меридиана и проекции продольной оси ЛА на горизонтальную плоскость и есть географический курс ЛА.
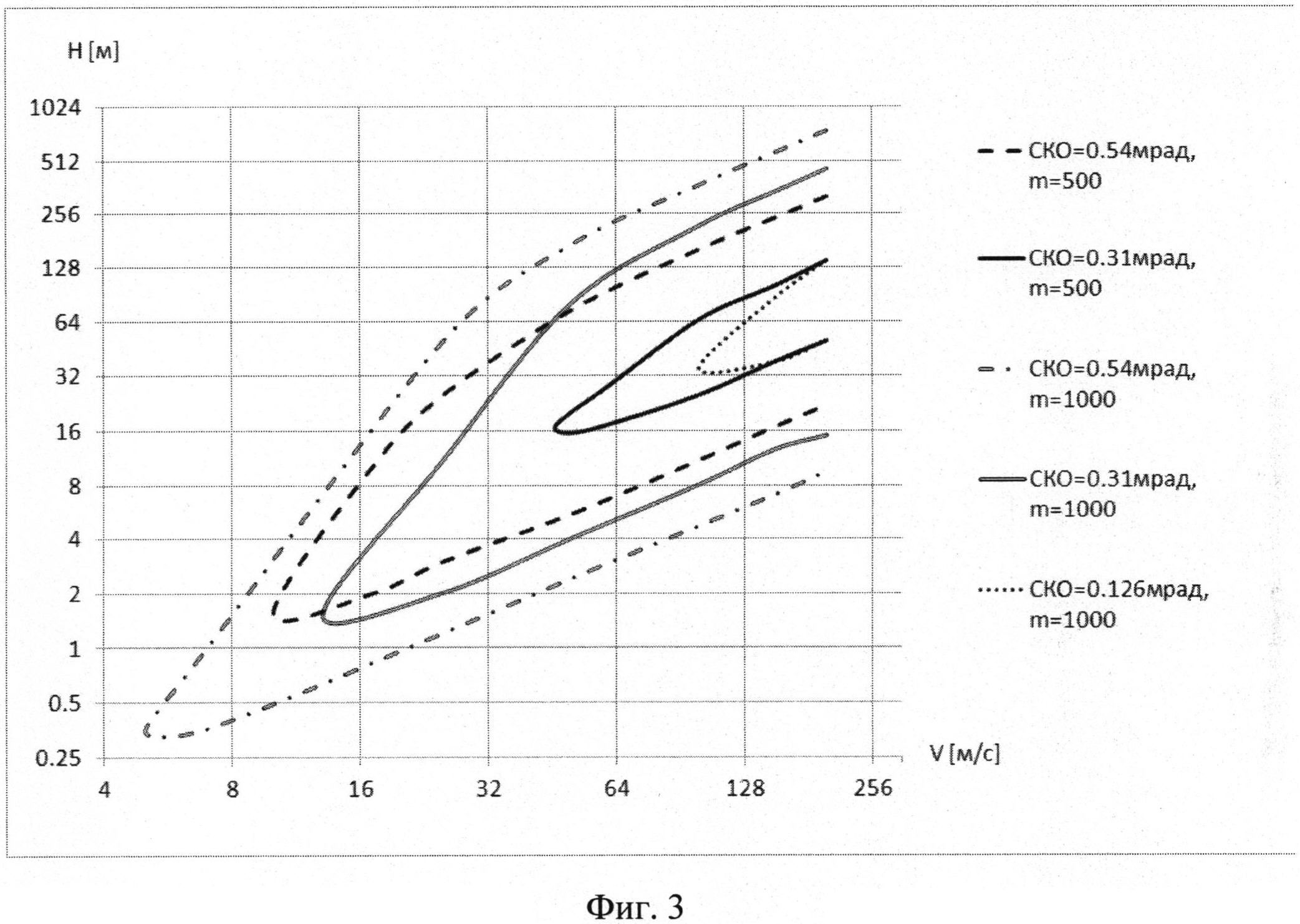
На фиг. 3 представлены области заданной точности в системе координат скорость (V) - высота (Н) при времени формирования активной части траекторий движения изображений опорных точек, равном Δt0=3 сек.
Способ реализуется следующим образом. В процессе полета ЛА, оборудованного ОЭС переднего обзора, формируется последовательность ТВ или ТП изображений подстилающей поверхности. Точность определения углов ориентации вектора скорости ЛА по видеопоследовательности, формируемой ОЭС переднего обзора, в значительной степени определяется точностью и временем надежного сопровождения выделенных опорных точек при движении ЛА. При этом достаточно сопровождать на изображениях хотя бы две опорные точки, и, следовательно, имеется возможность значительного ужесточения требований к свойствам захватываемых для сопровождения точек по сравнению с требованиями к ним при решении традиционных задач выделения на изображениях возможно большего количества характерных точек.
При стабилизированном в инерциальном пространстве поле зрении ОЭС переднего обзора изображения выделенных опорных точек при прямолинейном полете ЛА в каждый момент времени двигаются на фокальной плоскости по лучам, расходящимся из одной точки (точки схождения). Положение этой точки на изображении определяется направлением вектора скорости ЛА в тот же момент времени в приборной системе координат (связанной с полем зрения ОЭС переднего обзора). В пределах поля зрения, как правило, выделяются более 5 опорных точек, уверенно сопровождаемых до их выхода за пределы поля зрения. Для определения координат точки схождения необходимо сопровождать хотя бы 2 опорные точки, траектории которых в фокальной плоскости расходятся под достаточно большими углами (45°-135°).
Рассмотрим последовательность вложенных друг в друга временных интервалов Δti=Ti-ti, соответствующих различным пикселям, формирующим участок траектории движения опорной точки на фокальной плоскости ОЭС переднего обзора за заранее заданное время сопровождения Δt0=T0-t0. На каждом интервале Δti с помощью метода «двух засечек» по траекториям движения опорных точек определяются положения двух прямых линий на фокальной плоскости и координаты точки их пересечения. Если на этом интервале ЛА двигается с ускорением  , то выражения для тангенсов углов ориентации вектора скорости в приборной системе координат в момент времени T0, определенных по двум засечкам положения опорных точек на i-м интервале, могут быть записаны в следующем виде:
, то выражения для тангенсов углов ориентации вектора скорости в приборной системе координат в момент времени T0, определенных по двум засечкам положения опорных точек на i-м интервале, могут быть записаны в следующем виде:


где  ,
,  ,
,  - проекции вектора скорости ЛА на оси координат X, Y, Z в момент времени t (ось Х является оптической осью ОЭС переднего обзора);
- проекции вектора скорости ЛА на оси координат X, Y, Z в момент времени t (ось Х является оптической осью ОЭС переднего обзора);
 - средняя величина проекции вектора скорости
на интервале времени (ti,Ti), при этом
- средняя величина проекции вектора скорости
на интервале времени (ti,Ti), при этом  может быть точно измерена по сигналам МФ РЛС или ДИСС; a
X(t), a
Y(t), a
Z(t) - проекции вектора ускорения на оси координат X, Y, Z;
может быть точно измерена по сигналам МФ РЛС или ДИСС; a
X(t), a
Y(t), a
Z(t) - проекции вектора ускорения на оси координат X, Y, Z;
F - фокусное расстояние объектива ОЭС переднего обзора;
yi, zi - координаты пересечения продолжений отрезков прямых линий (называемых в дальнейшем хордами), соединяющих изображения опорной точки на фокальной плоскости в моменты времени ti и Ti, то есть построенных по двум засечкам положений каждой опорной точки на концах интервала времени Δti.
Каждое (i-е) косвенное измерение этих тангенсов соответствует измерению положения точки схождения на фокальной плоскости для одного и того же момента времени T0. Оценку каждого из двух искомых тангенсов углов ориентации вектора скорости будем определять как среднее взвешенное К таких косвенных измерений (i=0, 1, …, K-1). Эти измерения соответствуют построению точек схождения по продолжениям хорд, которые соединяют различные пары пикселей на выбранном (активном) участке траектории движения каждой опорной точки. Этот участок соответствует заданному интервалу времени сопровождения Δt0 и времени Т0, при котором формируется последняя (самая нижняя) точка траектории движения. При этом нулевое измерение производится по двум крайним пикселям этого участка, а каждое следующее измерение соответствует двум ближайшим к ним, но не использованным ранее пикселям на выбранном участке траектории движения опорной точки. Таким образом, если за время сопровождения двух опорных точек Δt0=T0-t0 их траектории на фокальной плоскости сформированы n+1 пикселями (будем всегда выбирать число n+1 четным), то на каждой траектории может быть построено (n+1)/2 хорд со статистически независимыми ошибками измерения координат их краевых точек и, следовательно, возможно провести K=(n+1)/2 независимых измерений направления движения ЛА, то есть искомых тангенсов углов в момент времени Т0. Тогда средние взвешенные оценки тангенсов угловой ориентации вектора скорости в момент времени T0 определяется выражениями

где  ,
,  - результаты i-го косвенного измерения величин tgφZ, tgφY, рассчитанные с помощью выражений (1), (2) по оценкам величин zi; yi; Vi; Δti; a
X; a
Y; a
Z;
- результаты i-го косвенного измерения величин tgφZ, tgφY, рассчитанные с помощью выражений (1), (2) по оценкам величин zi; yi; Vi; Δti; a
X; a
Y; a
Z;
 - величина, обратная квадрату СКО i-го косвенного измерения направления движения, то есть искомых тангенсов, рассчитанных только по засечкам положений опорных точек в моменты времени ti и Ti.
- величина, обратная квадрату СКО i-го косвенного измерения направления движения, то есть искомых тангенсов, рассчитанных только по засечкам положений опорных точек в моменты времени ti и Ti.
Далее рассмотрим точность предложенного метода.
В результате интегрирований измерений ускорения в соответствии с выражениями (1) и (2) будет накапливаться только систематическая составляющая ошибок акселерометров (смещение нуля) Δа, которую можно вынести за знак интегрирования. Тогда, используя (1) или (2) и предполагая малость изменения модуля скорости, можно получить следующее выражение для i-го косвенного измерения тангенса угла φ:

где, εi - ошибка косвенного измерения любой из координат (yi, zi) точки схождения, построенной методом двух засечек на i-м интервале времени.
Тогда из выражений (3) и (4) следует, что СКО оценки величины tgφ определяется выражением

где σa - СКО случайной величины Δa;
 - СКО построение точки пересечения продолжения хорд при i-м измерении искомого тангенса.
- СКО построение точки пересечения продолжения хорд при i-м измерении искомого тангенса.
При i-м измерении, т.е. расчете в соответствии (1) или (2) величины  , ошибки определения координат верхней и нижней краевых точек δвi, δнi будут иметь дисперсию
, ошибки определения координат верхней и нижней краевых точек δвi, δнi будут иметь дисперсию

где σ - СКО оценки положения изображения опорной точки на фокальной плоскости по одному кадру;
σСТ - СКО угловой стабилизации положения поля зрения.
Из очевидных геометрических построений следует, что статистически независимые ошибки определения положения изображений опорной точки в начале и конце интервала ее сопровождения δвi, δнi на i-м интервале времени приводят к среднему квадратическому отклонению построенной прямой в окрестности точки схождения

где Si - расстояние от искомой точки схождения до нижнего положения изображения опорной точки на фокальной плоскости при i-м измерении;
ΔSi - расстояние между верхним и нижним положениями изображений сопровождаемой опорной точки при i-м измерении.
σδ - СКО случайных величин δвi, δнi, рассчитывается по формуле (6).
Рассматривая эллипс рассеивания точек схождения при i-м измерении, можно показать, что максимальное СКО построения точки схождения определяется по формуле

где γ - острый угол между двумя хордами при i-м измерении на траекториях движения двух опорных точек.
Учитывая описанную выше процедуру построения хорд при формировании последовательности измерений  , при
, при  и, выражая в пикселях расстояния Si и ΔSi, последние можно представить как Si=S0-i, ΔSi=n-2i.
и, выражая в пикселях расстояния Si и ΔSi, последние можно представить как Si=S0-i, ΔSi=n-2i.
Тогда после преобразований выражения (7) с учетом (8) получим следующую формулу для расчета СКО i-го измерения тангенса угла при условии постоянства систематической ошибки Δа

Величины  при
при  , входящие в выражение (5), можно тоже выразить через V, S0, n, i.
, входящие в выражение (5), можно тоже выразить через V, S0, n, i.
Если задать дальность начала сопровождения опорной точки на активном участке траектории Х=Х0, то справедливо следующее соотношение

Подставляя (9) и (10) в выражение (5) и заменив суммирование по i интегрированием, после преобразований и интегрирования получим следующее выражение для дисперсии оценки тангенса угла ориентации вектора скорости ЛА.

где γ - среднее значение угла между касательными к траекториям движения изображений двух опорных точек;
n - длина (в пикселях) активного участка траектории движения изображения сопровождаемой опорной точки;
S0 - максимальное расстояние (в пикселях) от точки схождения до изображения опорной точки (т.е. до конца траектории ее сопровождения);
X0 - дальность начала сопровождения опорной точки на активном участке траектории;
σa - СКО систематической составляющей ошибки акселерометра;
 ;
;  ;
;  .
.
В случае горизонтального полета величины Х0 и n в выражении (11) можно оценить по формулам


где Н - высота полета;
ΔφZ - угол между вектором скорости и нижней кромкой поля зрения (при горизонтальном полете приблизительно равен вертикальному угловому размеру поля зрения);
m - число строк изображения, приходящихся на угол ΔφZ (то есть S0=m);
Δt0 - время сопровождения опорной точки на активном участке траектории.
Величина  в выражении (11) в соответствии с формулой (6) может быть представлена как
в выражении (11) в соответствии с формулой (6) может быть представлена как

где k - коэффициент связи СКО сопровождения опорной точки с угловым размером пикселя (k=0,36-0,71, см. раздел «Алгоритм детектора для выделения и пеленгации опорных точек»);
σСТ - СКО угловой стабилизации положения поля зрения.
Выражения (11)-(14) определяют зависимость величины  от высоты Н, скорости полета V и времени сопровождения опорных точек Δt0 на активном участке траектории. Для анализа этой зависимости были выбраны следующие значения параметров, соответствующие полученным выше результатам по точности пеленгации опорных точек в ограниченно сложных метеоусловиях, а также современным возможностям ОЭС переднего обзора [4-6] и акселерометров навигационного класса точности [3, 7]: k=0,71; ΔφZ=0,14 рад; σСТ=0,06 мрад; σа=0,01 м/с2; γ=71,6°; m=1000 и 500.
от высоты Н, скорости полета V и времени сопровождения опорных точек Δt0 на активном участке траектории. Для анализа этой зависимости были выбраны следующие значения параметров, соответствующие полученным выше результатам по точности пеленгации опорных точек в ограниченно сложных метеоусловиях, а также современным возможностям ОЭС переднего обзора [4-6] и акселерометров навигационного класса точности [3, 7]: k=0,71; ΔφZ=0,14 рад; σСТ=0,06 мрад; σа=0,01 м/с2; γ=71,6°; m=1000 и 500.
Анализ зависимости  от времени Δt0 показывает, что практически во всем диапазоне возможных величин V и Н при маловысотном полете и числе строк 500-1000 можно использовать одно и то же время сопровождения опорных точек Δt0=3 с, что несущественно увеличивает СКО по сравнению с минимально возможным значением величины
от времени Δt0 показывает, что практически во всем диапазоне возможных величин V и Н при маловысотном полете и числе строк 500-1000 можно использовать одно и то же время сопровождения опорных точек Δt0=3 с, что несущественно увеличивает СКО по сравнению с минимально возможным значением величины  при оптимальном времени Δt0=ΔtОПТ.
при оптимальном времени Δt0=ΔtОПТ.
Показанные на фиг. 3 границы этих областей, построенные в логарифмическом масштабе (при основании 2), соответствуют средним квадратическим ошибкам оценки углов ориентации вектора скорости, равным  ; 0,31; 0,54 мрад при форматах разложения, которые в случае горизонтального полета позволяют иметь 500 или 1000 строк между изображением горизонта и нижней кромкой поля зрения ОЭС переднего обзора. Выбранные значения
приблизительно соответствуют 5-20-кратному увеличению точности по сравнению с измерением углов ориентации вектора скорости ЛА по доплеровским смещениям частоты радиолокационных эхо-сигналов.
; 0,31; 0,54 мрад при форматах разложения, которые в случае горизонтального полета позволяют иметь 500 или 1000 строк между изображением горизонта и нижней кромкой поля зрения ОЭС переднего обзора. Выбранные значения
приблизительно соответствуют 5-20-кратному увеличению точности по сравнению с измерением углов ориентации вектора скорости ЛА по доплеровским смещениям частоты радиолокационных эхо-сигналов.
Таким образом, предложенный способ обработки последовательности ТВ или ТП изображений, формируемых ОЭС переднего обзора ЛА, позволяет, не прерывая обзора подстилающей поверхности (без угловых перемещений поля зрения), при малых высотах полета за 3 секунды определить текущие углы ориентации вектора скорости ЛА с СКО 1-2 угл. мин, т.е. в несколько раз точнее, чем бортовые доплеровские системы и системы спутниковой навигации.
Источники информации
1. Дудник П.И., Кондартенков Г.С., Татарский В.Г., Ильчук А.Р., Герасимов А.А. Авиационные радиолокационные комплексы и системы / под ред. Дудника. Учебник. Издание ВВИА имени профессора Н.Е. Жуковского. 2006. 1112 с.
2. Патент РФ на изобретение №2178145, 2002 (прототип).
3. Современные информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов / под ред. Красильщикова М.Н., Себрякова Г.Г. - М.: ФИЗМАТЛИТ, 2009. - 556 с.
4. David G. Lowe Distinctive Image Features from Scale-Invariant Keypoints // International Journal of Computer Vision, 60, 2 (2004), pp. 91-110.
5. Березин В.В., Гатаулин В.М., Цыцулин А.К. Стабилизация изображения при наблюдении с БПЛА // изв. вузов приборостроение. 2005. Т. 48, №4. С. 65-72.
6. Василюк Н.Н. Косвенная стабилизация программного движения оси оптического прибора, установленного на подвижном основании // Авиакосмическое приборостроение, 2007. №4. С. 7-11.
7. Titterton H., Weston J.L. Strapdown Inertial Navigation Technology, Second Edition, Progress in Astronautics and Aeronautics Series, 207 Published by AIAA, © 2004, 2nd Edition, 574 p.
Способ измерения курса летательного аппарата (ЛА), основанный на измерениях с помощью гироскопических устройств углов курса, крена, тангажа, измерениях составляющих вектора угловой скорости по строительным осям ЛА, по которым в функции крена и тангажа определяют и затем интегрируют угловую скорость изменения курса, измерениях с помощью спутниковой навигационной системы (СНС) составляющих вектора путевой скорости ЛА по осям географической системы координат, которые используют для определения угла ориентации вектора путевой скорости ЛА относительно географического меридиана, компенсации угла сноса в угле ориентации вектора путевой скорости относительно географического меридиана, использовании разностного сигнала, полученного в результате компенсации, либо для коррекции сигналов курса, полученных прямым измерением и интегрированием угловой скорости изменения курса, либо непосредственно в качестве сигнала курса при отказе других систем измерения курса, отличающийся тем, что в оптико-электронной системе переднего обзора измеряют углы ориентации относительно строительных осей ЛА гиростабилизированного поля зрения телевизионного (ТВ) или тепловизионного (ТП) датчика изображений (ДИ), в котором оптическое изображение формируется в фокальной плоскости и считывается матричными чувствительными элементами, выделяют по ТВ/ТП изображениям опорные точки на поверхности Земли для их дальнейшего сопровождения, фиксируют траектории перемещения изображений опорных точек по фокальной плоскости ДИ, сопровождая их на последовательности кадров и регистрируя их координаты, моменты времени формирования соответствующих кадров, углы ориентации поля зрения ДИ относительно строительных осей ЛА, показания датчиков ускорений и формируемые с помощью СНС и ИНС оценки составляющих вектора скорости по строительным осям ЛА в эти моменты времени, выделяют на траекториях пары одновременно формируемых участков, для каждой пары выделенных участков траекторий определяют координаты точки схождения как точки пересечения продолжений хорд, стягивающих эти участки, определяют параметры угловых положений линий визирования, проходящих через полученные точки схождения, и центр проекции, который используется в ДИ для формирования оптического изображения, находя тем самым направления векторов средних скоростей ЛА на интервалах времени формирования выделенных пар участков траекторий движения изображений опорных точек по фокальной плоскости, используя зарегистрированные данные корректируют полученные направления векторов средних скоростей ЛА, приводя их к текущему моменту времени, определяют параметры углового положения вектора скорости ЛА в текущий момент времени относительно системы координат, связанной с полем зрения ДИ, как результат осреднения скорректированных параметров углового положения векторов средних скоростей ЛА, по найденным параметрам углового положения вектора скорости ЛА, углам ориентации поля зрения ДИ относительно строительных осей ЛА и углам крена и тангажа в текущий момент времени определяют углы, задающие направление полета относительно строительных осей ЛА и направление вектора путевой скорости ЛА относительно проекции продольной оси ЛА на горизонтальную плоскость (угол сноса).
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ определения характеристик осколочного поля снаряда и устройство для его осуществления
Способ управления характеристиками поля поражения осколочно-фугасной боевой части ракеты и устройство для его осуществления
Способ испытания боеприпасов на аэроудар и устройство для его осуществления
Способ определения эффективности фугасного воздействия равных по массе сосредоточенного и дробного рассредоточенного зарядов взрывчатого вещества
Способ определения инициирующей способности дистанционного боеприпаса и устройство для его осуществления
Способ оценки пробивного действия дистанционного боеприпаса и устройство для его осуществления
Способ распознавания класса цели и устройство для его осуществления
Способ распознавания класса цели и устройство для его осуществления
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ определения характеристик осколочного поля снаряда и устройство для его осуществления
Способ испытания боеприпасов на аэроудар и устройство для его осуществления
Способ определения эффективности фугасного воздействия равных по массе сосредоточенного и дробного рассредоточенного зарядов взрывчатого вещества
Способ определения инициирующей способности дистанционного боеприпаса и устройство для его осуществления
Способ оценки пробивного действия дистанционного боеприпаса и устройство для его осуществления
Способ распознавания класса цели и устройство для его осуществления
Способ распознавания класса цели и устройство для его осуществления
Автомобильная бортовая информационная система

