Результат интеллектуальной деятельности: СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для обеспечения поиска подводных лодок в заданных районах мирового океана.
Общей тенденцией военного судостроения является существенное снижение шумности современных подводных лодок (ПЛ) и, как следствие, повышение скрытности их боевых действий. Дальности обнаружения малошумных ПЛ пассивными режимами гидроакустических комплексов (ГАК) уменьшились с десятков до единиц километров. Увеличение габаритов приемных антенн не дают существенного повышения эффективности режимам шумопеленгования гидроакустических комплексов. Поэтому для освещения подводной обстановки на больших акваториях необходимо привлекать огромное число поисковых сил и средств, что становится неразрешимой проблемой для военно-морского флота [1].
Противолодочные силы ведущих морских государств решают проблему борьбы с малошумными подводными лодками в контексте общей концепции создания единой информационной среды в районах боевых действий путем использования быстро развертываемых, многоэлементных систем освещения подводной обстановки, так называемых сетецентрических систем [2].
Система освещения подводной обстановки предоставляет командованию полную картину подводной обстановки в районе боевых действий и обеспечивает целеуказание назначенным противолодочным силам. Любая малошумная подводная лодка обнаруживается при попадании в зону действия элементов системы освещения подводной обстановки.
Известен способ освещения подводной обстановки путем развертывания в заданном районе системы автономных гидроакустических станций (АГАС) обнаружения подвижных объектов [3]. Эта система является одним из элементов системы освещения подводной обстановки и представляет собой комплекс автономных приемных станций для обнаружения и классификации подводных объектов с передачей информации по радио или гидроакустическому каналу. Система разворачивается либо в районе предполагаемых действий ПЛ противника, либо в виде рубежа для контроля подводного пространства на направлении вероятного движения противника. В состав одного комплекта системы АГАС входят несколько десятков станций, устанавливаемых на якорях на глубинах в несколько сотен метров. Способ постановки не отличается от известных способов [4] постановки радиогидроакустических буев, например, с противолодочных самолетов или надводных кораблей. Время функционирования АГАС - до 6 месяцев. АГАС решает задачу обнаружения, классификации и определения направления на цель в режиме шумопеленгования и передачи этой информации на корабль - наблюдатель. Для этого АГАС оснащена направленной пассивной антенной и излучателем для передачи информации по гидроакустическому каналу. Известны и другие автономные гидроакустические станции подобного способа освещения подводной обстановки [5, 6].
Недостатком способа освещения подводной обстановки с помощью данных устройств являются малая дальность обнаружения в режиме шумопеленгования, а для контроля большой акватории требуется постановка большого числа станций для обеспечения требуемой эффективности системы освещения подводной обстановки.
Известен способ освещения подводной обстановки путем быстрого развертывания в заданных районах мирового океана специальных судов, например типа «Victories», вооруженных гидроакустической станцией AN/UQQ-2 (SURTASS) [7]. Эти надводные корабли относятся к классу судов дальнего гидроакустического наблюдения (НК ДГН).
Способ освещения подводной обстановки заключается в организации поиска подводных лодок в заданном районе при работе гидроакустической станции в режиме шумопеленгования. ГАС AN/UQQ-2 использует гибкую протяженную буксируемую антенну (ГПБА) длиной 1220 м, которая может выпускаться за корму на 1830-м кабеле и буксироваться в диапазоне глубин (150-450) м. Данная система освещения подводной обстановки была эффективна, пока шумности подводных лодок были достаточно велики и дальность обнаружения достигала 200 км.
Однако в связи с уменьшением шумности ПЛ в последние десятилетия в несколько раз, дальности обнаружения их в пассивном режиме уменьшились до единиц километров. В связи с этим, НК ДГН стали применять активно-пассивный способ освещения подводной обстановки, заключающийся в применении в системе SURTASS буксируемого излучателя.
Недостатками данного способа являются:
- низкая эффективность поиска подводных лодок данным способом ввиду малой дальности обнаружения в пассивном режиме;
- фрагментарность зоны обзора в активно-пассивном режиме, формирующейся вокруг приемной антенны и имеющей наибольшую дальность обнаружения в направлении, перпендикулярном линии ГПБА;
- ввиду отсутствия скрытности НК ДГН существует большая вероятность его уничтожения противоборствующей стороной.
Наиболее близким по совокупности признаков к предлагаемому способу является способ освещения подводной обстановки, заключающийся в том, что подводная лодка, вооруженная гидроакустическим комплексом, дополнительно оснащается быстро развертываемой многоэлементной гидроакустической системой. Такой системой, например, является система ADS (Advanced Deployable System), представляющая собой донную оптико-волоконную гидроакустическую решетку [8] длиной до 20 км, скрытно устанавливаемую в заданном районе поисковой подводной лодкой, например, типа «Virginia». При этом требуется сравнительно плоская донная поверхность и глубина моря, позволяющая работать водолазам-монтажникам. С помощью системы ADS обнаруживают цели, классифицируют их и определяют координаты целей при ее работе в пассивном режиме, а при обнаружении включают активный режим для определения координат цели. В активно-пассивном режиме работы ADS производят излучение зондирующего сигнала стационарными донными излучателями, установленными на удалении 2-3 мили от оси ADS. Конструкция излучателя включает в себя активную антенную часть, имеющую небольшую положительную плавучесть, и блоки питания и генератора, размещаемые в якорном устройстве. Блоки питания имеют ограниченную емкость, поэтому излучение производится эпизодически только после установления гидроакустического контакта в режиме шумопеленгования.
Данные о подводной обстановке, полученные ADS, по оптическому кабелю передают на подводную лодку, где их интегрируют с данными ГАК ПЛ.
По результатам испытаний было признано, что способ освещения подводной обстановки, построенный на взаимодействии ГАК ПЛ и системы ADS, обеспечивает подводной лодке повышение эффективности освещения подводной обстановки за счет использования выносной гидроакустической системы.
Передача данных о подводной обстановке на надводный корабль или летательный аппарат осуществляется по радиоканалу.
Недостатками способа освещения подводной обстановки с помощью системы ADS являются:
- сравнительно невысокая дальность обнаружения системы, т.к. основным способом обзора является пассивный режим, а активный режим служит для измерения дальности до цели по данным первичного обнаружения в пассивном режиме;
- ограниченность по времени использования активного режима ввиду ограниченной электрической емкости блока питания;
- жесткие требования к району постановки выносной гидроакустической антенны по рельефу дна и глубине места, заключающиеся в необходимости установки донной системы на ровной донной поверхности и возможности работы водолазов-монтажников на заданной глубине;
- технологическая сложность развертывания антенной решетки и излучателя, требующая использования с борта подводной лодки до 3-х подводных аппаратов и планеров и до десяти водолазов-монтажников и приводящая к снижению боезапаса подводной лодки, ввиду необходимости загрузки в ракетные шахты и торпедные аппараты модулей системы ADS и технологической оснастки;
- стесненность маневрирования поисковой ПЛ при получении данных от ADS по оптоволоконному кабелю.
Техническим результатом от использования изобретения является:
- расширение зоны освещения подводной обстановки за счет осуществления поиска подводной лодки противника гидролокатором ГАК поисковой ПЛ с использованием выносной гидроакустической системы, что является оправданным при решении задачи недопущения проникновения противника через заданные рубежи или в охраняемые районы;
- существенное упрощение технологии развертывания выносной гидроакустической системы и снижение требований к районам установки АГАС в части рельефа дна и глубин моря.
Для обеспечения заявленного технического результата способ освещения подводной обстановки, включающий поиск и обнаружение подводной лодки противника с последующим измерением дистанции до нее путем всенаправленного излучения зондирующих сигналов, прием шумовых и отраженных сигналов от подводной лодки противника, обработку принятых сигналов, классификацию подводной лодки противника, определение ее координат и передачу полученной информации на поисковую подводную лодку (ПЛ), причем прием шумовых и отраженных сигналов от подводной лодки противника производят выносной многоэлементной гидроакустической системой в районе вероятного нахождения подводной лодки противника, а всенаправленное излучение зондирующих сигналов производят из точки на оси выносной многоэлементной гидроакустической системы, введены новые признаки, а именно: в качестве выносной многоэлементной гидроакустической системы в районе вероятного нахождения подводной цели противника традиционным методом, например с самолетов [4], выставляют одно- или многослойную сеть из активно-пассивных автономных гидроакустических станций (АГАС), установленных на якорях, имеющих непересекающиеся зоны обзора, и формирующих каждая j пространственных каналов, излучение зондирующих сигналов производят гидролокатором ГАК поисковой ПЛ, расположенной в центре сети из АГАС, находящейся на расстоянии от поисковой ПЛ, превышающем дальность действия ее гидролокатора, прямым зондирующим сигналом гидролокатора, принятым АГАС, запускают счетчик, отсчитывающий время t до момента приема этой АГАС эхо-сигнала от подводной цели, после чего счетчик останавливают и по времени t определяют дистанцию от АГАС до подводной цели rагас, по номеру пространственного канала АГАС определяют пеленг на подводную цель и, если она классифицирована в АГАС как подводная лодка, информацию о дистанции и пеленге на подводную лодку противника кодируют и кодированную информацию переизлучают в направлении поисковой ПЛ, приемным трактом ее гидролокатора принимают кодированный сигнал и отображают раскодированную информацию о дистанции и пеленге на подводную лодку противника на индикаторе гидролокатора ГАК поисковой ПЛ.
Таким образом, введение в состав системы освещения подводной обстановки выносной многоэлементной гидроакустической системы позволяет увеличить площадь обзора морского пространства поисковой подводной лодкой, упростить технологию ее развертывания и расширить перечень районов Мирового океана, в которых возможна постановка выносной гидроакустической системы из-за снятия ограничений по рельефу дна и глубине моря.
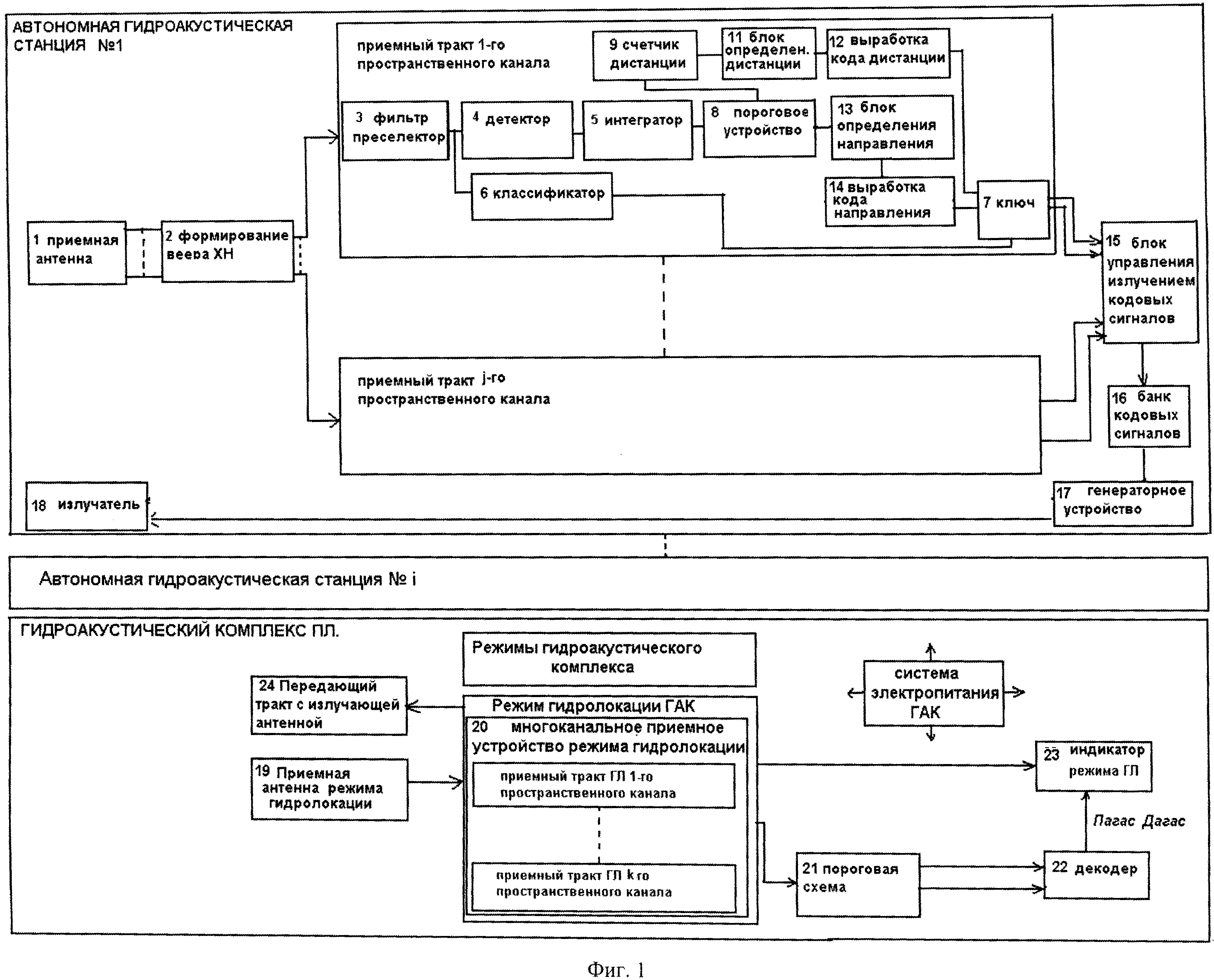
Сущность изобретения поясняется фиг.1 и 2, где на фиг.1 приведена блок-схема взаимодействия отдельной АГАС и гидролокатора ПЛ, а на фиг.2 представлено расположение поисковой ПЛ относительно сети АГАС и соответствующие им зоны обзора, которые формируют зону СОПО.
Каждая АГАС (фиг.1) включает приемную пассивную направленную антенну 1, соединенную с устройством 2 формирования веера характеристик направленности, на выходе которого формируются j пространственных каналов, каждый из которых соединен со своим приемным трактом, содержащим фильтр преселектор 3, настроенный на полосу приема прямого или отраженного сигнала гидролокатора ГАК ПЛ, детектор 4, интегратор 5, классификатор 6, пороговое устройство 8, счетчик дистанции 9, блок определения дистанции 11, блок выработки кода дистанции 12, блок определения направления 13, блок выработки кода направления 14, ключ 7. Выходы всех j приемных трактов соединены с соответствующими входами j-канального блока управления излучения кодовых сигналов 15, последовательно соединенного с банком кодовых сигналов16, генераторным устройством 17 и излучателем 18.
Режим гидролокации гидроакустического комплекса включает передающий тракт с излучающей антенной 24 и приемную антенну режима гидролокации 19, соединенную с многоканальным приемным устройством 20. Выход каждого приемного устройства 20 соединен с пороговой схемой 21 и индикатором 23. С пороговой схемы 21 кодовые сигналы поступают на декодер 22, с выхода которого параметры дистанции и пеленга на цель относительно АГАС поступают на индикатор 23.
Предлагаемый способ освещения подводной обстановки, реализуемый блок-схемой (фиг.1), функционирует следующим образом.
Передающий тракт с излучающей антенной 24 режима гидролокации ГАК ПЛ излучает всенаправленный зондирующий сигнал, который, при условии нахождения подводной лодки противника в зоне обзора режима гидролокации гидроакустического комплекса поисковой ПЛ, отражается от подводной лодки противника и в виде эхо-сигнала поступает в приемный тракт 20 гидролокатора гидроакустического комплекса поисковой ПЛ, обрабатывается, например, как это описано в [9], и результаты в виде дистанции и направления на цель отображаются на индикаторе 23.
В случае, если ПЛ противника находится за пределами зоны обзора гидролокатора гидроакустического комплекса поисковой ПЛ, прямой зондирующий сигнал гидролокатора гидроакустического комплекса поступает на направленную приемную антенну 1 автономной гидроакустической станции, соединенной с устройством формирования веера характеристик направленности 2, на выходе которого формируется j пространственных каналов, каждый из которых соединен со своим приемным трактом, содержащим фильтр-преселектор 3, согласованный по частотной полосе с сигналом гидролокатора ГАК ПЛ, выделенный в фильтре прямой зондирующий сигнал детектируется устройством 4, интегрируется интегратором 5 и поступает на пороговое устройство 8, где сигнал, превысивший порог и являющийся прямым сигналом гидролокатора, запускает счетчик дистанции 9. Сеть АГАС может выставляться за пределами дальности действия режима гидролокации ГАК поисковой ПЛ в несколько слоев (фиг.2).
Отраженный от подводной цели эхо-сигнал поступает последовательно на направленную приемную антенну 1 автономной гидроакустической станции, формирователь 2 характеристики направленности, фильтр-преселектор 3, детектор 4, интегратор 5, пороговое устройство 8 и на счетчик дистанции 9, останавливая его, а отсчитанное время t между запуском и остановкой счетчика дистанции 9 поступает в блок определения дистанции 11, где осуществляется умножение t на половинное значение скорости звука с/2 и таким образом получают значение дистанции от АГАС до подводной цели rагас, причем значение дистанции округляется до целого значения и переводится в двоичный трехразрядный код в блоке 12, известный, например, из [10], одновременно с порогового устройства 8 сигнал поступает в блок определения направления 13, известный, например, из [11], и далее в блок выработки кода направления 14 [10], где переводится в двоичный трехразрядный код, что в конечном счете позволяет передать от АГАС на поисковую ПЛ восемь значений дальности с точностью 1 км и восемь значений направления с точностью 45°, одновременно с выхода фильтра преселектора 3 эхо-сигнал поступает на классификатор 6, работа которого известна из [12], и, если цель классифицирована как подводная лодка, с выхода классификатора поступает сигнал на открытие ключа 7 и выработанные коды дистанции и направления с блоков 12 и 14 поступают на блок управления излучением кодовых сигналов 15, работа которого известна из [13], где в соответствии с полученными кодами из банка кодовых сигналов 16 выбирают тональные сигналы для излучения кодовых комбинаций с частотами f1 и f2, разнесенными по частоте с зондирующим сигналом режима ГЛ. Эти сигналы передают последовательно на генератор 17 и гидроакустический излучатель 18, который излучает в воду набор из шести сигналов на частотах f1 и f2, три из которых передают информацию о дистанции и три о направлении на цель. Последовательность из шести излученных сигналов принимается антенной 19 и передается на многоканальное приемное устройство 20 режима гидролокации ГАК, из которого отфильтрованная гребенкой фильтров последовательность из шести прямых сигналов с частотами f1 и f2 от АГАС поступает на пороговое устройство 21, причем для этих сигналов осуществляется компенсация эффекта собственного Доплера, способом, известным из [13], и далее последовательность из 6 тональных сигналов в декодере 22, работа которого известна также из [10], преобразуется в значения пеленга и дистанции ПЛ противника относительно АГАС, которые передаются в знаковом виде для отображения на индикаторе гидролокатора ГАК поисковой ПЛ.
Приведенный ниже пример иллюстрирует повышение эффективности освещения подводной обстановки при реализации предлагаемого способа, выражающегося в увеличении площади контролируемого подводного пространства.
В качестве примера приведены расчеты и сравнения площади освещаемого подводного пространства, сформированного зонами обзора ГАК поисковой ПЛ и сетью АГАС, и площади, освещаемой системой ADS, что дает возможность оценить эффективность предложения.
Расчеты выполнены для следующих исходных данных.
A. Общие исходные данные.
Гидроакустические условия - Баренцево море, зима, волнение моря 3б.
Радиус эквивалентной сферы подводной лодки R=10 м.
Приведенный уровень помехи на входе приемных антенн Pn=10-3 Па/Гц0.5.
Б. Параметры гидролокатора ГАК поисковой ПЛ.
Излучающая антенна ГАК имеет форму цилиндра высотой hи=1 м; рабочая частота - 3 кГц; длительность зондирующего сигнала Т=1 с; величина звукового давления при излучении - 150 кПа.
Приемная антенна ГАК имеет форму цилиндра диаметром dп=8 м, высотой hп=4 м; прием осуществляется статическим веером характеристик направленности; коэффициент концентрации γп приемной антенны на рабочей частоте равен γп=720. Пороговое отношение сигнал/помеха по напряжению на выходе приемного тракта kβ=10.
B. Параметры АГАС.
Используется система из 5-ти АГАС, расположенных на одной прямой. Высота приемной антенны АГАС - 1 м. Коэффициент концентрации антенны на рабочей частоте равен γп=36. Расстояние между АГАС равно удвоенной величине дальности обнаружения цели одной АГАС. Расстояние от поисковой ПЛ до системы АГАС равно дальности действия ГАК ПЛ в активном режиме для оговоренных условий.
Г. Параметры ADS, используемой в способе-прототипе в режиме ГЛ.
Излучающая антенна имеет форму цилиндра высотой hи=1 м; рабочая частота - 3 кГц; длительность зондирующего сигнала Т=1 с; величина звукового давления при излучении - 15 кПа. Расстояние излучающей антенны от приемных антенн - 3 мили.
Приемная антенна ADS реализует прием эхосигналов на пяти участках протяженностью 0,9 км каждый (раствор ХН при этом равен 30). Расстояние между центрами участков равно 3,875 км. Коэффициент концентрации γп каждого участка на частоте 3 кГц равен γп=36.
Для расчетов площади поиска применена программа на языке Matlab, основанная на уравнении гидролокации [14], разработанная в ОАО «Концерн «Океанприбор» для полистатической системы активной гидролокации, методы которой изложены в [15].
Результаты расчетов.
Предложенный способ, основанный на использовании системы, включающей гидролокатор ГАК ПЛ и систему АГАС, обеспечивает суммарную площадь обнаружения, равную 7500 км2.
Способ-прототип, основанный на использовании системы ADS, обеспечивает площадь обнаружения, равную 1400 км2.
Таким образом, для рассмотренного примера предложенный способ обеспечивает выигрыш в величине площади обнаружения, равный 5,3. Кроме того, предложенный способ существенно упрощает технологию развертывания выносной гидроакустической системы и, соответственно, позволяет снизить затраты и время работ. Предложенный способ позволяет развертывать выносную гидроакустическую систему в районах со сложным рельефом дна и большими глубинами (до нескольких сотен метров).
Таким образом, на основании приведенного примера можно считать, что заявленный технический результат, заключающийся в увеличении контролируемой площади подводного пространства за счет совместного использования ГАК поисковой ПЛ и сети АГАС, упрощения технологии ее развертывания и снижения требований к районам установки - достигнут.
Источники информации
1. Naval Forces, 2003, С. Ort, P. Berens и P. De Theije «From low frequency active sonar to netEcentric underwater warfare: Remedy for silent subs» v.24, №5, pp.41-48.
2. Дайджест зарубежной прессы. ВМС и кораблестроение. Развитие сетецентрических подводных средств обнаружения подводных лодок. СПб., ЦНИИ им. академика А.Н. Крылова. №52, 2009 г.
3. Морская радиоэлектроника. Краткий справочник. СПб., изд. Политехника. 2003 г., стр.186-188.
4. Интернет - сайт http://aviation.gb7.ru/il-38.html. 2014 г.
5. Патент на изобретение 2427005. Автономный гидроакустический модуль. 2006 г.
6. Патент на изобретение 2427004. Автономная радиогидроакустическая станция. 2009 г.
7. "Зарубежное военное обозрение". 09.1995.
8. Jane′s Defence Weekly, 2003, v.39, №26, p.6.
9. B.A.Зарайский, A.M.Тюрин. Теория гидролокации. Л., ВМА. 1975 г. Стр. 390-392.
10. Интернет - сайт: radioelhribor.ru/shifratoryi-i-deshifratory.html. 25.12.2013.
11. Г.В. Лоскутова, К.И. Полканов. Пространственно-частотные и частотно-волновые методы описания и обработки гидроакустических полей. СПб., «Наука», 2007 г., стр.136-140.
12. Патент на изобретение №2473924. Способ обнаружения и классификации сигнала от цели. 2011 г.
13. Выонг Туан Хунг. Повышение помехозащищенности передачи кодовой информации по гидроакустическому каналу связи. Диссертация на соискание ученой степени кандидат технических наук. СПб., ЛЭТИ., 2005 г.
14. Ю.С. Кобяков, Н.Н. Кудрявцев, В.И. Тимошенко. Конструирование гидроакустической рыбопоисковой аппаратуры. Л., Судостроение. 1986 г., стр.74-76.
15. И.С. Школьников и др. Вопросы точности определения координат и параметров движения цели в режимах моно- и мультистатической активной гидролокации. Научно-технический сборник «Гидроакустика». Вып.17(1). СПб: Наука, 2013 г, стр.61-72.
Способ освещения подводной обстановки, включающий поиск и обнаружение подводной цели с последующим измерением дистанции до нее путем всенаправленного излучения зондирующих сигналов, прием шумовых и отраженных сигналов от подводной цели, обработку принятых сигналов, классификацию подводной цели, определение ее координат и передачу полученной информации на поисковую подводную лодку (ПЛ), причем прием шумовых и отраженных сигналов от подводной цели производят выносной многоэлементной гидроакустической системой в районе вероятного нахождения под водой лодки противника, а всенаправленное излучение зондирующих сигналов производят из точки на оси выносной многоэлементной гидроакустической системы, отличающийся тем, что в качестве выносной многоэлементной гидроакустической системы в районе вероятного нахождения подводной лодки противника традиционным методом, например, с самолетов, выставляют одно- или многослойную сеть из активно-пассивных автономных гидроакустических станций (АГАС), установленных на якорях, в пассивном режиме имеющих непересекающиеся зоны обзора и формирующих каждая j пространственных каналов, излучение зондирующих сигналов производят гидролокатором ГАК поисковой ПЛ, расположенной в центре сети из АГАС, находящейся на расстоянии от поисковой ПЛ, превышающем дальность действия ее гидролокатора, прямым зондирующим сигналом гидролокатора, принятым АГАС, запускают счетчик, отсчитывающий время t до момента приема этой АГАС эхо-сигнала от подводной лодки противника, после чего счетчик останавливают и по времени t определяют дистанцию от АГАС до подводной лодки противника r, по номеру пространственного канала АГАС определяют пеленг на подводную цель и, если подводная цель классифицирована в АГАС как подводная лодка противника, информацию о дистанции и пеленге на подводную лодку противника кодируют и кодированную информацию переизлучают в направлении поисковой ПЛ, приемным трактом ее гидролокатора принимают кодированный сигнал и отображают раскодированную информацию о дистанции и пеленге на подводную лодку противника на индикаторе гидролокатора ГАК поисковой ПЛ.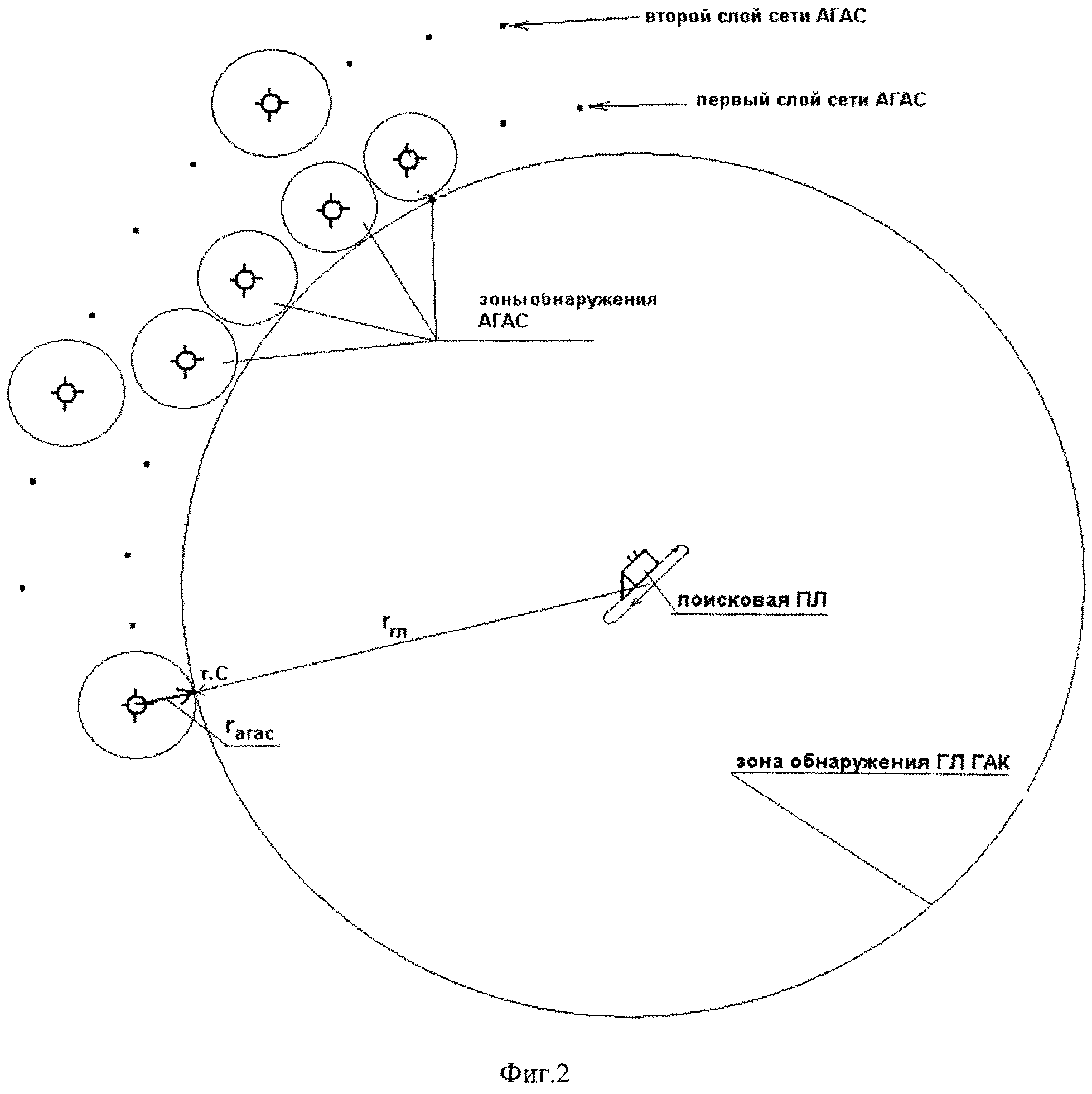
Способ адаптивной обработки сигнала шумоизлучения
Способ определения параметров движения торпеды
Способ интеграции систем обнаружения шумящих в море объектов
Способ гидроакустического обеспечения противоторпедной защиты судов
Способ адаптивной обработки сигнала шумоизлучения
Способ определения параметров движения торпеды
Способ интеграции систем обнаружения шумящих в море объектов
Способ гидроакустического обеспечения противоторпедной защиты судов
Способ определения текущих координат цели в бистатическом режиме гидролокации

