Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения систем определения направления движения объектов, обнаруженных гидролокатором освещения ближней обстановки.
Известны гидролокаторы, которые определяют направление движения объекта с использованием траекторного анализа. Такой гидролокатор включает излучение зондирующего сигнала, одновременный прием отраженного объектом эхо-сигнала статическим веером характеристик направленности, многоканальную обработку принятых эхо-сигналов, траекторный анализ, включающий завязку траектории, обнаружение траектории, сопровождение траектории и определение направления движения объекта по данным траекторного анализа. (Богорад В.И., Скуратовский А.В. «Современные технические аспекты обнаружения и классификации подводных объектов». Труды конференции «Прикладные технологии гидроакустики и гидрофизики». Седьмая международная конференция. СПб. 2004 г. Стр.65-69). Недостатком этого гидролокатора является то, что для определения направления движения используется большое число посылок и не используется радиальная протяженность объекта.
Известен «Алгоритм обнаружения протяженных объектов в активной гидроакустической станции обзора ближней обстановки». Ю.А. Брага, А.И. Машошин, А.С. Смирнов. Труды конференции «Прикладные технологии гидроакустики и гидрофизики». Десятая международная конференция. СПб. 2010 г. Стр.84-87. Рассматриваемый гидролокатор содержит излучение зондирующего сигнала, одновременный прием отраженных объектом эхо-сигналов статическим веером характеристик направленности, многоканальную обработку принятых эхо-сигналов, траекторный анализ, измерение дистанции, измерения пеленга на объект, измерение радиальной протяженности, траекторный анализ положения объекта по нескольким посылкам, определение курсового угла на основе траекторного анализа, классификацию протяженного объекта на основе всех перечисленных измерений.
Недостатком рассматриваемого способа классификации является необходимость излучения серии зондирующих сигналов для определения курсового угла движения объекта локации.
Этого недостатка лишен способ автоматической классификации по патенту РФ 2461020 от 10.09.2012, который является наиболее близким к предлагаемому способу и который может быть принят за прототип.
Этот способ включает следующие операции: излучают зондирующий сигнал, принимают эхо-сигналы статическим веером характеристик направленности, обрабатывают принятые эхо-сигналы в цифровом виде, определяют помеху и вычисляют порог, производят обнаружение по всем пространственным каналам, измеряют и запоминают амплитуды и номера отсчетов, превысивших порог обнаружения, выбирают пространственный канал, имеющий максимальную амплитуду принятого сигнала, измеряют радиальную протяженность объекта в пространственном канале, имеющем максимальную амплитуду, измеряют угловую протяженность объекта по числу пространственных каналов, в которых обнаружено превышение порога обнаружения, и по количеству пространственных каналов и по радиальной протяженности в канале с максимальной амплитудой проводят автоматическую классификацию крупноразмерной и малоразмерной цели.
Недостатком этого способа является использование для классификации оценки радиальной протяженности объекта, а не полной протяженности объекта, для чего необходима оценка курсового угла движения объекта, которая способом-прототипом не производится.
Задачей изобретения является повышение вероятности правильной классификации обнаруженных объектов.
Для решения поставленной задачи, в способ автоматической классификации объекта, обнаруженного гидролокатором, содержащий излучение зондирующего сигнала, прием эхо-сигналов статическим веером характеристик направленности, цифровую обработку принятого сигнала, определение уровня помехи, вычисление порога, определение превышения выбранного порога обнаружения последовательно по всем пространственным каналам статического веера характеристик направленности, измерение и запоминание амплитуды и номера отсчетов, превысивших порог обнаружения, измерение дистанции, введены новые признаки, а именно: выбирают соседние пространственные каналы, в которых произошло превышение порога, определяют временную протяженность эхо-сигнала в этих каналах ΔTi, где i (1…5) - номер канала, по каждому i-му каналу определяют момент прихода эхо-сигнал Ti в каждый i-й канал, определяют разность между моментами времени Ti в соседних пространственных каналах Ti+1-Ti, по известной ширине характеристики направленности одного пространственного канала α и измеренной дистанции (Дизм) определяют угловую протяженность эхо-сигнала по формуле K=Дизм sinα, по формуле β=arctg С(Ti+1-Ti)/K, где С - скорость звука, определяют курсовой угол β положения объекта, определяют временную протяженность объекта ΣΔTi последовательным суммирование оценок временной протяженности в тех последовательных пространственных каналах, в которых произошло превышение порога, определяют полную протяженность объекта по формуле Lполн.=Lрад/sinβ, где Lрад=CΣΔTi, которая сравнивается с порогом для проведении классификации.
Техническим результатом является повышение вероятности правильной классификации путем определение курсового угла движения объекта и определение полной протяженности объекта по одной посылке.
Сущность предлагаемого способа заключается в следующем.
Эхо-сигнал от объекта классификации формируется на основе отражения энергии падающего зондирующего сигнала на объект по нормали к поверхности, отражающей зондирующий сигнал. Это приводит к тому, что при отражении формируется регулярный фронт волны, характеристика которой стабильна на некотором пространственном интервале. (Е.А. Штагер, Е.В. Чаевский. Рассеяние волн на телах сложной формы. М.: Сов. Радио, 1974 г.). При этом гидролокатор принимает отраженный эхо-сигнал веером статических характеристик направленности. Поскольку объект находится в дальнем поле и имеет ограниченные размеры, то эхо-сигнал от такого объекта представляет собой плоскую малоискаженную волну и будет приниматься несколькими характеристиками направленности одновременно. Эхо-сигналы от совокупности случайно расположенных отражателей характеризуют протяженные объекты классификации. Они представляют собой совокупность амплитуд, которые будут приниматься характеристиками направленности независимо друг от друга. Протяженный объект будет иметь несколько отражающих точек, которые могут быть приняты в различных характеристиках направленности с разной интенсивностью, поскольку облучаются и принимаются они под разными углами. Часто объекты классификации могут иметь настолько сложную конфигурацию, что в различных характеристиках направленности будут формироваться отраженные максимумы от различных сочетаний отражающих точек объекта. Достаточно подробно свойства таких объектов рассмотрены в известной книге «Физические основы подводной акустики» под редакцией В.И. Мясищева, М.: Сов. Радио, 1956 г., стр. 527…537. В зависимости от типа объекта и от его протяженности число каналов, в которых будут обнаружены эхо-сигналы от объекта, различны. Поскольку объект локации расположен в пространстве в зависимости от своего направления движения относительно излучающего гидролокатора, то эхо-сигналы от объекта будут разнесены и в пространстве и по дистанции, и они будут приниматься соседними характеристиками в различные моменты времени. Разница моментов приема эхо-сигналов соседними каналами (Ti+1-Ti) определяется положением объекта локации, а точнее курсовым углом движения объекта относительно направления излучения и относительно направления собственного движения. Таким образом, моменты начала приема эхо-сигналов в соседних пространственных каналах будут характеризовать пространственное расположение объекта облучения. Если объект облучения находится точно в бортовом аспекте к направлению собственного движения излучателя, то моменты времени приема эхо-сигнала в соседних характеристиках направленности будут совпадать. Чем больше будет разница времен приема эхо-сигналов в соседних пространственных каналах, тем больше будет курсовой угол движения объекта относительно движения излучателя. Чем меньше будет разница времен приема эхо-сигналов, тем ближе будет к бортовому положение объекта относительно гидролокатора. Для определения конкретной величины угла необходимо определить разницу моментов прихода эхо-сигнала в соседние характеристики направленности. Ширина соседних характеристик направленности отличается друг от друга незначительно и расположены центральные оси характеристик направленности стационарно и неподвижно. Поэтому фазовые центры этих характеристик разнесены на фиксированную величину, и расстояние между осями в пространстве зависит от дистанции, что определяет угловую протяженность объекта локации. Эту величину можно определить, если известна дистанция до объекта и значение ширины характеристики направленности по формуле K=Дизм sinα. Эта величина характеризует исходную угловую протяженность объекта при облучении в бортовом аспекте при одновременном приеме эхо-сигнала двумя соседними характеристиками направленности. Чем больше отличается время приема эхо-сигналов в соседних характеристиках направленности, тем больше курсовой угол положения объекта локации. Значение курсового угла будет определяться из выражения β=arctg С(T2-T1)/Дизм sinα, где С - скорость звука. Если времена равны, то и тангенс угла равен 0 и угол равен 0. По мере увеличения разности времен приема увеличивается и угловое положение объекта локации. Имея измеренное значение радиальной протяженности объекта и курсовой угол положения объекта, можно получить оценку полной протяженности объекта, по которой и проводят дальнейшую классификацию.
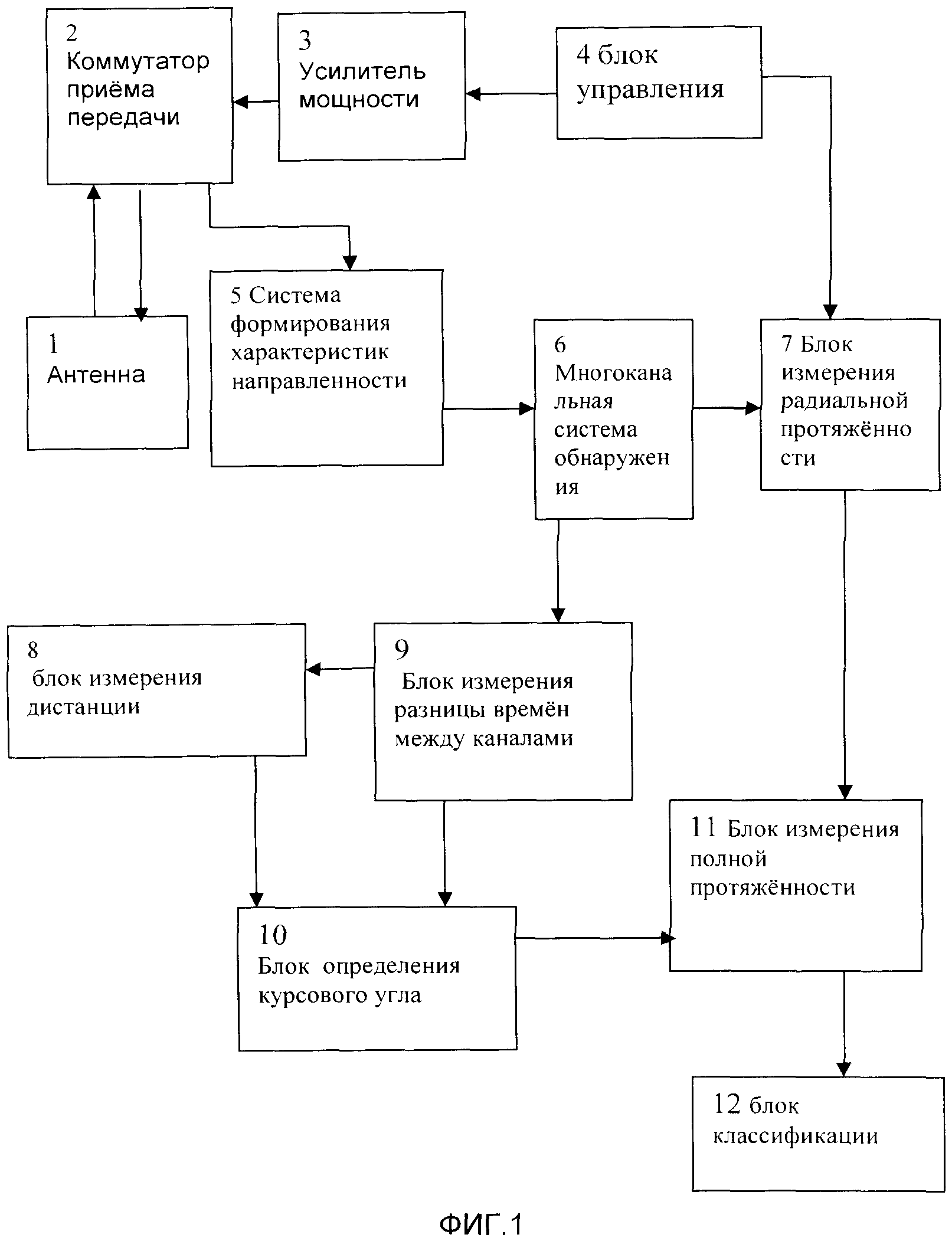
Сущность изобретения поясняется фиг.1, где приведена блок-схема устройства, реализующая рассматриваемый способ.
Устройство содержит последовательно соединенные антенну 1, коммутатор 2 приема передач, систему 5 формирования характеристик направленности, многоканальную систему 6 обработки, первый выход которой соединен со вторым входом блока 7 измерения радиальной протяженности и через первый вход блока 11 измерения полной протяженности с блоком классификации 12. Второй выход блока 6 многоканальной обработки через первый выход блока 9 измерения разницы времен прихода между каналами, через блок 8 измерения дистанции, первый вход блока 10 определения курсового угла соединен с вторым входом блока 11 измерения полной протяженности, а второй выход блока 9 измерения разницы времен прихода между каналами соединен со вторым входом блока 10 определения курсового угла. Первый выход блока 4 управления соединен через усилитель мощности 3 со вторым входом коммутатора 2, а второй выход блока 4 управления соединен со вторым входом блока 7 измерения радиальной протяженности.
Задающий генератор, усилитель мощности и коммутатор приема передачи могут быть выполнены, например, по схеме (Колчеданцев А.С. Гидроакустические станции, Л., Судостроение, 1982 г., стр.39-41). Антенна и система формирования характеристик направленности являются известными устройствами, рассмотренными, например, в Л.В. Орлов, А.А. Шабров Гидроакустическая аппаратура рыбопромыслового флота. Л., Судостроение, 1987 г., стр 116 или Смарышев М.Д. Добровольский Ю.Ю. Гидроакустические антенны, Л., Судостроение, 1984 г. Многоканальная система обнаружение является известным устройством, приведенным, например, в B.C. Бурдик Анализ гидроакустических систем Л., Судостроение, 1988 г., стр.365. В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение протяженности, оценку курсового угла и классификацию обнаруженных целей по сравнению измеренной оценки с эталоном Эти вопросы достаточно подробно рассмотрены в научной литературе «Применение цифровой обработки сигналов» п/р Оппенгейма, М.: Мир, 1980 г., а также Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. СПб: Наука, 2004 г., стр. 278-297.
Операции предложенного способа целесообразно рассмотреть на примере работы реализующего его устройства.
Излучаемый зондирующий сигнал из блока управления 4, через усилитель мощности 3, поступает на коммутатор приема-передачи 2, передается на антенну 1 и излучается в водную среду.
Эхо-сигнал, принятый антенной 1, через коммутатор приема-передачи 2 поступает на систему формирования характеристики направленности 5 и далее на вход 6 многоканальной системы обнаружения. Количество каналов определяется возможностями системы 5. С выхода каждого канала обработки сигнал поступает на вход многоканальной системы обнаружения 6, где определяются моменты обнаружения и интервалы времени превышения сигнала над порогом.
Обнаруженные эхо-сигналы поступают в блок 7, где измеряется радиальная протяженность объекта в каждом канале и происходит суммирование протяженностей в соседних каналах, затем полученная оценка передается в блок 11. Со второго выхода блока 6 обнаруженные эхо-сигналы поступают в блок 9, где определяется разность времен прихода эхо-сигналов в соседние каналы, и далее в блок 8 для измерения дистанции и блок 10 для определения курсового угла положения объекта. По этим сигналам в блоке 8 происходит измерение дистанции, которая поступает в блок 10, где происходит определение курсового угла положения объекта. Полученная оценка угла передается в блок 11 измерение полной протяженности, на второй вход которого поступает измеренная оценка суммарной радиальной протяженности из блока 7. По полученной в блоке 11 полной протяженности в блоке 12 производится классификация по имеющимся эталонам объектов.
Таким образом, используя оценку курсового угла положения объекта, можно получить полную протяженность объекта локации по одной посылке и повысить вероятность правильной классификации обнаруженных объектов.
Способ автоматической классификации объекта, обнаруженного гидролокатором, содержащий излучение зондирующего сигнала, прием эхо-сигналов статическим веером характеристик направленности, цифровую обработку принятого сигнала, определение уровня помехи, вычисление порога, определение превышения выбранного порога обнаружения последовательно по всем пространственным каналам статического веера характеристик направленности, измерение и запоминание амплитуды и номера отсчетов, превысивших порог обнаружения, измерение дистанции Дизм, отличающийся тем, что выбирают соседние пространственные каналы, в которых произошло превышение порога, определяют временную протяженность эхо-сигнала в этих каналах ΔT, где i - номер канала, по каждому каналу i определяют временное положение момента начала огибающей эхо-сигнала T, определяют разность времен между моментами начала измеренных эхо-сигналов в соседних пространственных каналах T-T, по известной ширине характеристики направленности одного пространственного канала α и измеренной дистанции Дизм определяют угловую протяженность эхо-сигнала по формуле K=Дизм sinα, определяют по формуле β=arctg С(T-T)/K, где С - скорость звука, курсовой угол β положения объекта, определяют радиальную протяженность объекта суммированием оценок радиальной протяженности в тех последовательных пространственных каналах, в которых произошло превышение порога, определяют по формуле L=L/sin β, где , полную протяженность объекта, которая сравнивается с порогом для проведения классификации.

Способ определения глубины погружения нижней точки айсберга
Способ автоматического обнаружения и классификации объекта в водной среде
Способ автоматического определения гидролокатором курсового угла обнаруженного объекта
Способ определения дистанции гидролокатором
Способ автоматического определения параметров айсберга гидролокационным методом
Способ классификации целей, адаптированный к гидроакустическим условиям
Способ определения глубины погружения объекта
Способ измерения скорости звука по трассе
Система автоматического обнаружения и классификации гидролокатора ближнего действия
Способ обнаружения объекта и измерения его параметров
Способ определения глубины погружения нижней точки айсберга
Способ автоматического обнаружения и классификации объекта в водной среде
Способ автоматического определения гидролокатором курсового угла обнаруженного объекта
Способ определения дистанции гидролокатором
Способ автоматического определения параметров айсберга гидролокационным методом
Способ классификации целей, адаптированный к гидроакустическим условиям
Способ определения глубины погружения объекта
Способ измерения скорости звука по трассе
Система автоматического обнаружения и классификации гидролокатора ближнего действия
Способ обнаружения объекта и измерения его параметров

