Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ НЕЛИНЕЙНОЙ ДИНАМИКОЙ НЕПОСРЕДСТВЕННОГО ПОНИЖАЮЩЕГО ПРЕОБРАЗОВАТЕЛЯ НАПРЯЖЕНИЯ
Вид РИД
Изобретение
Заявленное изобретение относится к преобразовательной технике и может быть использовано при реализации цифровых систем управления преобразователями постоянного напряжения с функцией подавления опасных колебаний выходного напряжения, возникающих при определенном наборе параметров системы.
Известен способ International Journal of Circuit Theory and Applications [1], называемый методом с запаздывающей обратной связью, где для стабилизации неустойчивых периодических траекторий предполагается использование обратной связи с задержкой, приблизительно равной периоду стабилизируемого периодического режима.
Стабилизация проектного режима происходит за счет того, что к сигналу управления после регулятора стандартной системы управления прибавляется два корректирующих сигнала: масштабированная разность между током в стробоскопические моменты времени и током в стробоскопические моменты времени, задержанным на период широтно-импульсной модуляции; масштабированная разность между напряжением на конденсаторе в стробоскопические моменты времени и напряжением на конденсаторе в стробоскопические моменты времени, задержанным на период широтно-импульсной модуляции, что позволяет откорректировать вектор вынуждающих воздействий с точки зрения системы дифференциальных уравнений, описывающих систему, и обеспечить проектный периодический режим.
К недостаткам метода относятся сложность выбора длительности задержки и параметров системы управления, что приводит к отсутствию гарантии корректной работы устройства в широком диапазоне изменения его параметров.
Задачей изобретения является управление нелинейной динамикой системы для обеспечения ее работы в проектном периодическом режиме с малой амплитудой колебаний в широком диапазоне параметров системы управления или входного напряжения с учетом возможности работы в областях мультистабильности.
Данная задача решается за счет того, что к силовой части преобразователя, выполненного на основе непосредственного понижающего преобразователя, LC-фильтра, подключена система управления, состоящая из двух подсистем: основная подсистема, состоящая из вычитателя, формирующего разность сигнала задания и сигнала обратной связи (сигнал ошибки), масштабирующего усилителя обратной связи по напряжению, пропорционального регулятора, на вход которого подается сигнал ошибки, а выходной сигнал подается на вход компаратора, на второй вход которого поступает сигнал с генератора развертывающего напряжения, работающего синхронно с задающим генератором, что позволяет сформировать сигнал управления преобразователем, обеспечивающий стабилизацию среднего значения выходного напряжения; вспомогательная подсистема управления, отличающаяся тем, что рассматриваемом способе не используется задержка по времени при стабилизации проектного режима, а введены аппроксиматоры на основе нейронных сетей, которые, используя текущие значения задающего напряжения входного напряжения и сопротивления нагрузки, формируют задающий вектор (ток дросселя и напряжение на конденсаторе) на неподвижную точку отображения 1-цикла, вычитание из которого вектора обратных связей по переменным состояния в стробоскопические моменты времени, получаемым на выходе устройств выборки-хранения с использованием масштабирующих усилителей, реализуется с помощью вычитателей, далее, результат вычитания усиливается масштабирующими усилителями и подается на вычитатель основной подсистемы управления, корректируя сигнал ошибки, тем самым обеспечивая стабилизацию проектного динамического режима (1-цикла).
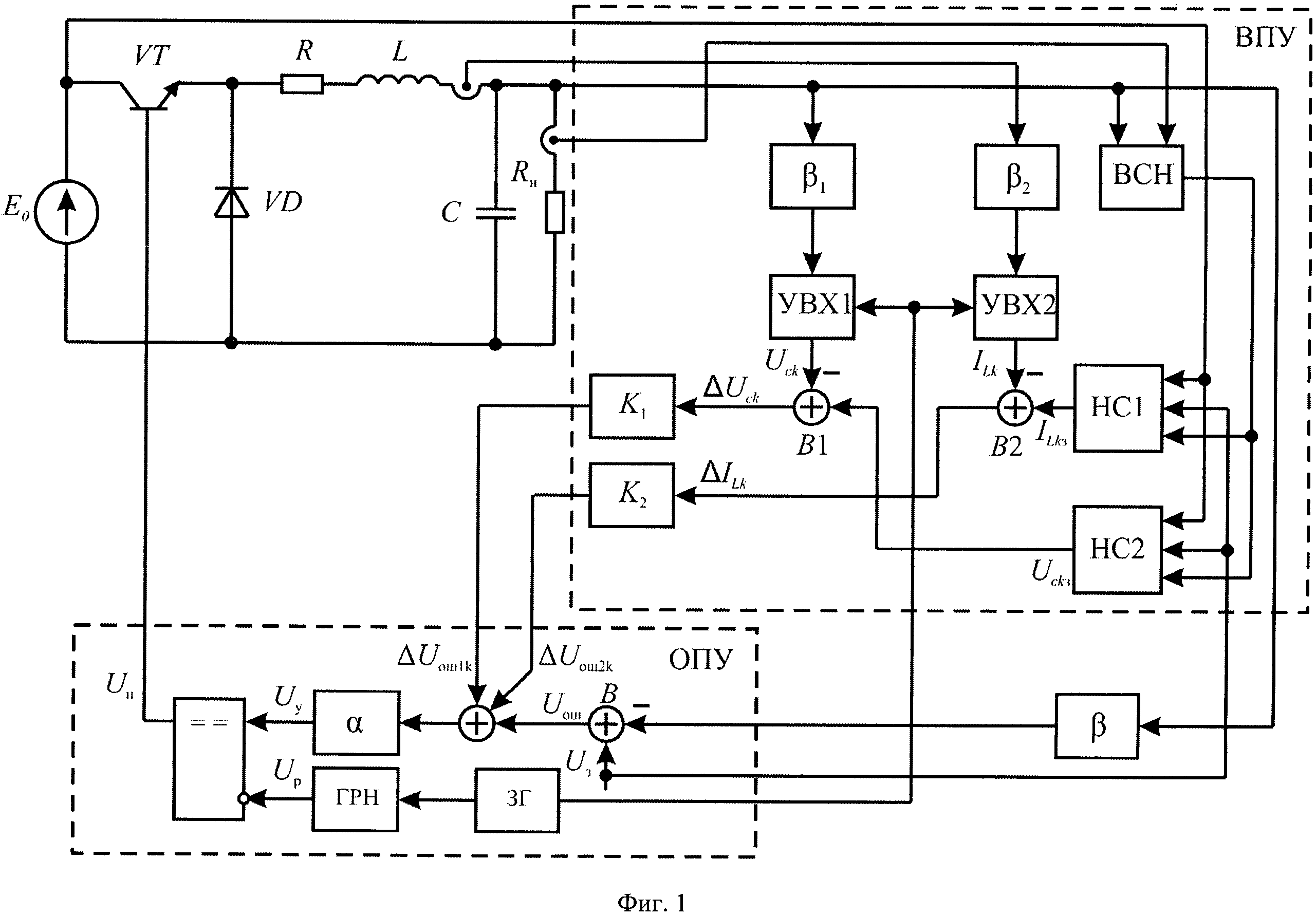
Функциональная схема системы управления (СУ) непосредственным понижающим преобразователем постоянного напряжения представлена на фиг.1.
В СУ выделяется две подсистемы:
- основная подсистема управления (ОПУ) обеспечивает стабилизацию среднего значения выходного напряжения без учета нелинейных динамических свойств;
- вспомогательная подсистема управления (ВПУ) обеспечивает стабилизацию проектного динамического режима (1-цикла).
Стандартная система автоматического управления с обратной связью по среднему значению выходного напряжения импульсного преобразователя описывается функцией стробоскопического отображения вида [2]
 ,
,
где вектор переменных состояния X=[iL, Uc,]Т, iL - ток дросселя; Uc - напряжение на конденсаторе; zk - коэффициент заполнения ШИМ на k-том тактовом интервале; Xk-1 - вектор переменных состояния системы в начале k-го тактового интервала. Матрица параметров системы A и вектор вынуждающих воздействий B представлены в [2]. Матрица A зависит от индуктивности дросселя L, емкости конденсатора C, паразитного сопротивления дросселя R и сопротивления нагрузки RH. Вектор B зависит от входного напряжения преобразователя E0 и индуктивности дросселя L.
В стандартной системе управления для заведения обратной связи по напряжению используется масштабирующий усилитель с коэффициентом β. Вычитатель B рассчитывает ошибку по напряжению Uош, которая подается на пропорциональный регулятор с коэффициентом α. В качестве задания на среднее значение выходного напряжения используется сигнал Uз. Сигнал управления после регулятора Uy подается на неинвертирующий вход компаратора. На инвертирующий вход компаратора подается развертывающее напряжение Up от генератора развертывающего напряжения ГРН. Выходные импульсы компаратора Uи управляют силовым транзистором VT в составе непосредственного понижающего преобразователя.
В рассматриваемом случае в стандартную СУ введены два дополнительных управляющих воздействия ΔUош1k и ΔUош2k (фиг.1), которые определяются по выражениям
ΔUош1k=K1(Uckз-Uck)
ΔUош2k=K2(ULkз-ILk),
где Uckз, ULkз - сигналы задания на напряжение на конденсаторе и ток дросселя соответственно в стробоскопические моменты времени (неподвижная точка отображения); Uck - масштабированное напряжение на конденсаторе в стробоскопические моменты времени; ILk - масштабированный ток дросселя в стробоскопические моменты времени.
Выражение для функции стробоскопического отображения СУ имеет вид
 ,
,
где Δzk - приращение коэффициента заполнения на k-том тактовом интервале.
Указанное приращение рассчитывается на основе выражения
 ,
,
где Upm - амплитуда развертывающего напряжения на выходе ГРН.
При реализации рассматриваемого алгоритма управления наиболее важной задачей является расчет неподвижной точки стробоскопического отображения, которая находится с использованием метода уравнений периодов [2]. Однако при использовании указанного метода микроконтроллеру СУ приходится реализовывать один из численных методов решения систем нелинейных трансцендентных уравнений, что требует достаточно серьезных вычислительных ресурсов. Для упрощения указанной задачи использовались две нейронные сети (HC1 и HC2), каждая из которых рассчитывает свою компоненту вектора неподвижной точки 1-цикла отображения X*=[Uckз, iLkз]T.
В качестве входных переменных нейронных сетей (факторов регрессии) выступают параметры, которые при работе системы могут варьировать в широких пределах. К факторам, используемым в рассматриваемых регрессионных моделях, относятся задающее напряжение Uз, входное напряжение E0 и сопротивление нагрузки Rн, которое рассчитывается с использованием сигналов датчика тока нагрузки и датчика выходного напряжения. Указанный подход позволяет существенно сократить время расчета неподвижной точки, а достигаемая точность аппроксимации является приемлемой с точки зрения практики. В рассматриваемой системе управления нейронные сети реализовывали регрессионную модель вида X*=F(P)=[f1(U3, E0, Rн), f2(Uз, E0, Rн)], где f1 и f2 - нелинейные трехпараметрические функции - компоненты векторной функции F, реализуемые HC1 и HC2 соответственно, P=[Uз, E0, Rн]T - вектор факторов регрессии. Вычисление текущего сопротивления нагрузки осуществляется блоком вычислителя сопротивления нагрузки ВСН.
Обратная связь по переменным состояния в стробоскопические моменты времени в предлагаемой системе (фиг.1) осуществляется с использованием устройств выборки-хранения (УВХ1 и УВХ2 на фиг.1). Как видно из фиг.1, запоминание напряжения на выходном конденсаторе C и тока дросселя L, масштабированных с коэффициентами β1 и β2 соответственно, происходит в начале каждого тактового интервала при подаче на УВХ стробирующего импульса с задающего генератора ЗГ, который работает синхронно с генератором развертывающего напряжения ГРН. С помощью двух вычитателей (B1 и B2 на фиг.1) рассчитывается отклонение текущего положения точки отображения от заданного с последующим масштабированием с коэффициентами K1 и K2 соответствующих компонент вектора рассогласования ΔX=[ΔUck, ΔiLk]T. Вычисленные приращения ΔUош1k и ΔUош2k суммируются с напряжением ошибки ОПУ Uош, вызывая на каждом тактовом интервале стабилизирующее проектный режим приращение коэффициента заполнения Δzk. При установлении в системе проектного 1-цикла ΔUош1k=ΔUош2k=0, а также Δzk=0.
Предлагаемая структура системы управления реализуется достаточно большим спектром современных цифровых сигнальных микроконтроллеров или недорогих программируемых логических интегральных схем. При использовании последних существенно упрощается расчет задания на неподвижную точку 1-цикла с использованием нейронных сетей.
Чтобы проанализировать предложенный способ, выполнено компьютерное моделирование, результаты которого представлены на фиг.2, 3 в виде карт динамических режимов, показывающих особенности разбиения пространства параметров системы на области устойчивости различных режимов. Моделирование осуществлялось при следующих параметрах системы: L=0,1 Гн; C=1 мкФ; R=10 Ом; Rн=100 Ом; α=60; β=0,01; Uз=5 B; Upm=10 B; a=0,0001 c; K1=-0,9; K2=-0,9; β1=0,01; β2=0,1.
При построении карт динамических режимов (фиг.2, 3) выбран достаточно большой коэффициент усиления регулятора α=60, что позволило оценить возможности метода при работе системы в достаточно сложных условиях. Как видно из фиг.2, область 1-цикла системы без управления нелинейной динамикой является неодносвязной и ее площадь относительно мала.
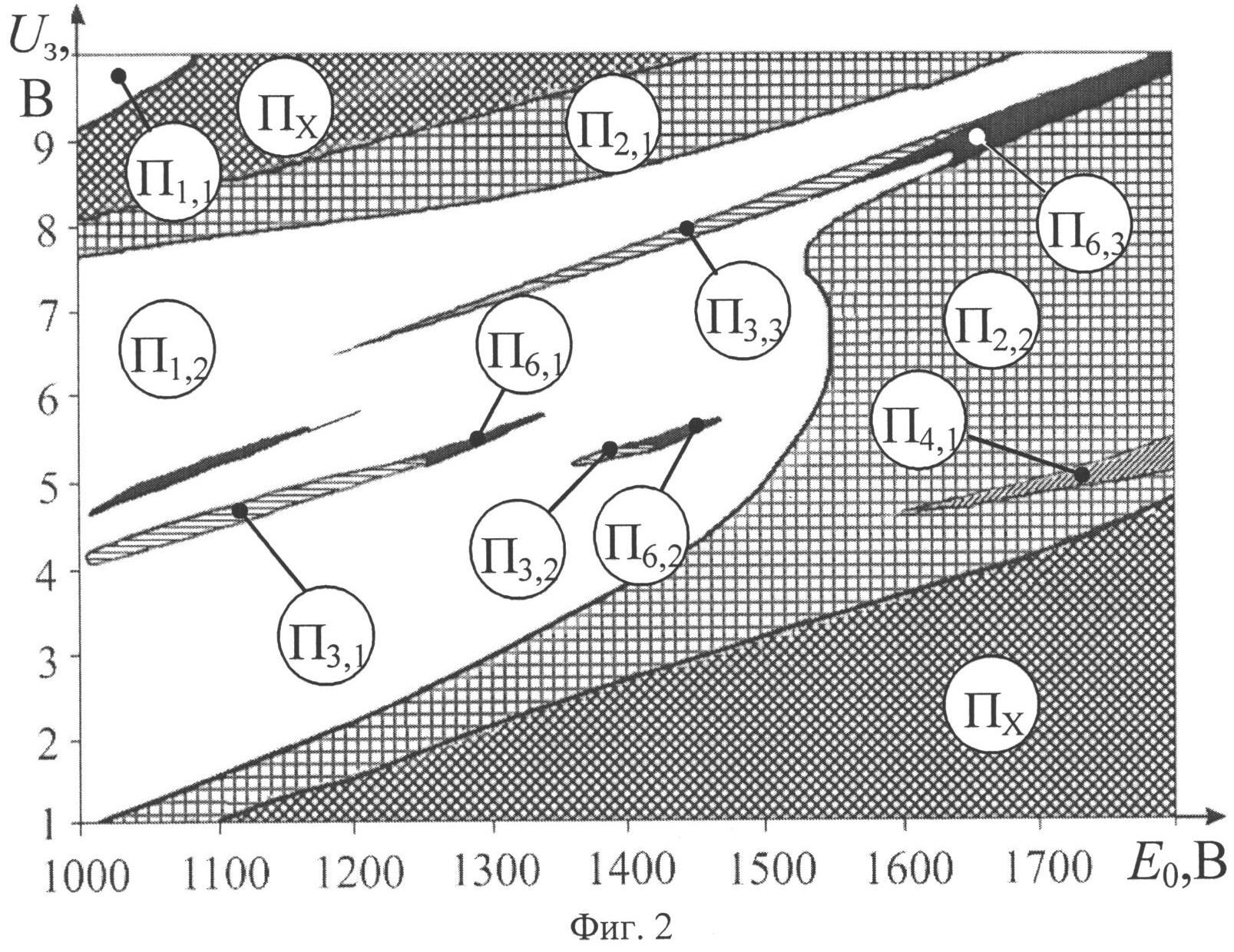
На фиг.3 представлена карта динамических режимов, анализ которой показывает, что область 1-цикла (П1) существенно увеличилась по сравнению с областью 1-цикла на фиг.2. В частности, при входном напряжении E0<1500 B во всем диапазоне изменения напряжения задания в системе присутствует устойчивый 1-цикл. При E0>500 B и при UЗ>8 B на карте появляются области хаотических колебаний, площадь которых относительно невелика. Использование данного метода управления позволило существенно улучшить нелинейные динамические свойства системы, при этом коэффициент усиления пропорционального регулятора остался неизменным, что позволило сохранить заданную статическую ошибку Uош.
Моделирование наглядно показывает эффективность способа управления нелинейной динамикой непосредственного понижающего преобразователя напряжения. Использование данного способа управления позволит отказаться от параметрического синтеза при обеспечении заданных нелинейных динамических свойств системы и при этом обеспечить заданные показатели быстродействия и точности стабилизации выходного напряжения.
Литература
1. Batlle C. Stabilization of periodic orbits of the buck converter by time-delayed feedback / C. Batlle, E. Fossas, G. Olivar // International Journal of Circuit Theory and Applications. - 1999. - Vol.27, №3. - P.617-631.
2. Кобзев, A.B. Нелинейная динамика полупроводниковых преобразователей / A.B. Кобзев, Г.Я. Михальченко, А.И. Андриянов, С.Г. Михальченко - Томск: Томск, гос. ун-т систем управления и радиоэлектроники, 2007. - 224 с.
Система управления, реализуемая за счет того, что к силовой части преобразователя, выполненного на основе непосредственного понижающего преобразователя, ZC-фильтра, подключена система управления, состоящая из двух подсистем: основная подсистема, состоящая из вычитателя, формирующего разность сигнала задания и сигнала обратной связи (сигнал ошибки), масштабирующего усилителя обратной связи по напряжению, пропорционального регулятора, на вход которого подается сигнал ошибки, а выходной сигнал подается на вход компаратора, на второй вход которого поступает сигнал с генератора развертывающего напряжения, работающего синхронно с задающим генератором, что позволяет сформировать сигнал управления преобразователем, обеспечивающий стабилизацию среднего значения выходного напряжения; вспомогательная подсистема управления, отличающаяся тем, что введены аппроксиматоры на основе нейронных сетей, которые, используя текущие значения задающего напряжения, входного напряжения и сопротивление нагрузки (рассчитывает вычислитель сопротивления нагрузки), формируют задающий вектор (ток дросселя и напряжение на конденсаторе) на неподвижную точку отображения 1-цикла, вычитание из которого вектора обратных связей по переменным состояния в стробоскопические моменты времени, получаемым на выходе устройств выборки-хранения с использованием масштабирующих усилителей, реализуется с помощью вычитателей, далее результат вычитания усиливается масштабирующими усилителями и подается на вычитатель основной подсистемы управления, корректируя сигнал ошибки, тем самым обеспечивая стабилизацию проектного динамического режима (1-цикла).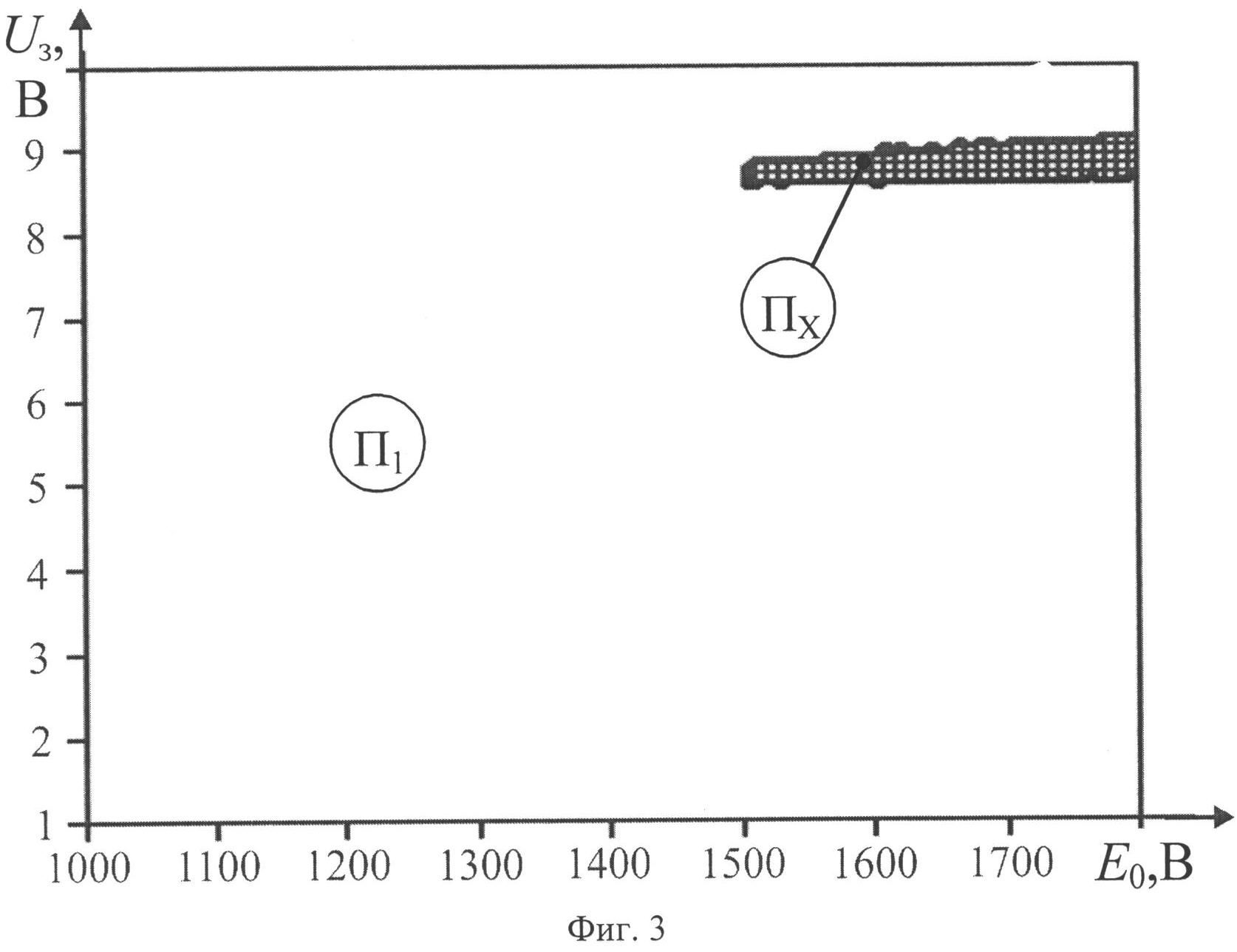
Фрикционно-полимерный амортизатор удара
Двигатель внутреннего сгорания
Металлокерамический фрикционный сплав
Способ изготовления многослойной ленты
Электрический генератор переменного тока с двигателем внутреннего сгорания
Генератор возвратно-поступательного движения с самовозбуждением
Грузозахватное устройство
Электрический генератор переменного тока со свободнопоршневым мотокомпрессором
Фрикционный гаситель колебаний
Способ энергоэффективного двухзонного регулирования скорости асинхронного двигателя в системе прямого управления моментом
Головка цилиндров двс
Двигатель внутреннего сгорания
Переносная электрическая установка
Толкатель клапана двигателя внутреннего сгорания
Рубашка гильзы цилиндра двигателя внутреннего сгорания жидкостного охлаждения
Преобразователь вибраций в элетрическое напряжение
Привод конвейера
Способ управления нелинейной динамикой преобразователей постоянного напряжения
Фрикционно-полимерный амортизатор удара
Узел подвешивания тягового электродвигателя

