Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ЗАКРЫЛКАМИ КРЫЛЬЕВ И ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ ГИБРИДНОГО ВЕРТОЛЕТА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к технической области механики полета летательного аппарата с вращающейся несущей поверхностью. Оно касается способа управления таким летательным аппаратом в устойчивой фазе полета на высокой скорости. Оно также касается устройства управления таким летательным аппаратом.
Этот способ и это устройство предназначены, в частности, для гибридных вертолетов, то есть для летательных аппаратов с вращающейся несущей поверхностью, оснащенных вспомогательным тяговым средством.
Классически летательный аппарат с вращающейся несущей поверхностью содержит, по меньшей мере, один несущий винт, обеспечивающий одновременно подъемную силу и движение летательного аппарата, фюзеляж и силовую установку.
Гибридный вертолет дополнительно содержит, по меньшей мере, один тяговый винт, а также несущую поверхность, как правило, состоящую из двух полукрыльев, расположенных с одной и другой стороны фюзеляжа, и из горизонтального оперения, расположенного на конце летательного аппарата.
Например, с одной и другой стороны фюзеляжа на каждом полукрыле установлены два тяговых винта изменяемого шага.
Кроме того, каждое полукрыло можно оборудовать, по меньшей мере, одним подвижным закрылком, позволяющим изменять подъемную силу каждого полукрыла. Точно так же, горизонтальное оперение содержит, по меньшей мере, одну подвижную поверхность, чтобы изменять подъемную силу горизонтального оперения. Эта подвижная поверхность может быть выполнена в виде руля высоты или может полностью представлять собой горизонтальное оперение.
Основной функцией двух полукрыльев является участие в создании подъемной силы гибридного вертолета во время полета на высокой скорости движения, при этом такую скорость обеспечивают тяговый винт или тяговые винты. При полетах на скоростях движения, меньших скорости крейсерского полета, можно говорить о полете на умеренной скорости.
Во время полета на высокой скорости движения подвижное горизонтальное оперение или руль высоты гибридного вертолета эквивалентны триммеру высоты самолета, называемому также на английском языке “trim”. Контроль гибридного вертолета по тангажу осуществляют при помощи циклического управления несущим винтом, тогда как подвижное горизонтальное оперение (или его руль высоты) позволяет регулировать балансировку по тангажу летательного аппарата в соответствии с заранее определенными критериями, такими как пространственное положение летательного аппарата или же момент изгиба стойки несущего винта. В этой конфигурации полукрылья обеспечивают участие в общей подъемной силе летательного аппарата, необходимой для поддержания летательного аппарата. Следовательно, несущий винт частично создает подъемную силу гибридного вертолета в полете на высокой скорости движения и, в случае необходимости, участвует в обеспечении его движения вперед.
Таким образом, можно отметить, что пилотирование гибридным вертолетом при полете на высокой скорости движения требует специальных средств управления, чтобы изменять значения подъемной силы полукрыльев и горизонтального оперения, а также шаг тяговых винтов.
Следовательно, во время полета на высокой скорости движения на пилота ложится большая и сложная рабочая нагрузка, чтобы управлять специальными средствами управления гибридного вертолета в дополнение к традиционным средствам управления летательного аппарата с вращающейся несущей поверхностью.
В связи с этим настоящее изобретение призвано предложить способ содействия пилоту, позволяющий, в частности, снизить его рабочую нагрузку за счет автоматического регулирования значений подъемной силы полукрыльев и горизонтального оперения, характерных для этого гибридного вертолета во время устойчивой фазы полета.
Под «устойчивой фазой полета» следует понимать полет на высокой скорости движения, то есть касающийся гибридных вертолетов, при котором полетные условия являются постоянными, то есть основные параметры полета являются постоянными. В частности, речь идет о вертикальной скорости и о траектории летательного аппарата. Постоянную вертикальную скорость можно получить, в частности, поддерживая постоянное пространственное положение и/или угол атаки летательного аппарата. В частном случае, когда вертикальная скорость является нулевой, устойчивая фаза полета происходит на постоянной высоте, и в этом случае говорят о крейсерском полете. Постоянная траектория соответствует траектории без изменения направления движения летательного аппарата. Во время этой устойчивой фазы полета предпочтительно скорость движения тоже является постоянной. Вместе с тем, она может меняться, как правило, медленно. Способ в соответствии с изобретением, характеризующийся медленным динамическим изменением, является совместимым с этим изменением скорости движения.
Уровень техники
Из документа US2008/0237392 известен гибридный вертолет, в котором используют систему контроля всех средств управления летательного аппарата. Действительно, летательный аппарат имеет базы данных, содержащие оптимизированные и заранее определенные параметры полета для различных условий полета и различных типов полета.
Пилот выбирает необходимый ему тип полета, например, с целью минимизации расхода топлива, минимизации вибраций или для обеспечения скорости движения. Система контроля определяет полетные условия при помощи различных датчиков, установленных на гибридном вертолете, и выбирает в базах данных заранее определенные регулировки различных средств управления летательного аппарата, соответствующие этим полетным условиям.
Система контроля передает эти заранее определенные регулировки в автопилот, который применяет их без вмешательства пилота для различных органов пилотирования гибридного вертолета.
В документе FR2959205 описан способ управления и регулирования угла отклонения горизонтального оперения гибридного вертолета на высокой и устойчивой скорости движения. Целью этого регулирования угла отклонения является оптимизация мощности, потребляемой летательным аппаратом.
Этот способ включает в себя три контура регулирования. Первый контур управляет пространственным положением летательного аппарата при помощи циклического продольного шага, и второй контур управляет скоростью движения летательного аппарата при помощи шага тяговых винтов. Эта два контура обеспечивают стабилизацию летательного аппарата по продольному пространственному положению и по скорости движения. Наконец, третий контур оптимизирует мощность летательного аппарата при помощи угла отклонения горизонтального оперения, поддерживая постоянные продольное пространственное положение и скорость движения.
Действительно, изменение угла отклонения горизонтального оперения изменяет его подъемную силу. Следовательно, поскольку первый контур регулирования поддерживает постоянное продольное пространственное положение, это изменение подъемной силы горизонтального оперения позволяет создавать действующий на фюзеляж пикирующий или кабрирующий момент тангажа. В этом случае необходимо воздействовать на ориентацию несущего винта, чтобы сделать его «кабрирующим», то есть с наклоном в сторону хвоста летательного аппарата, или «пикирующим», то есть с наклоном в сторону носа летательного аппарата, чтобы компенсировать, в случае необходимости, эффект момента тангажа, создаваемый оперением.
Когда несущий винт является пикирующим, он создает тяговое усилие, то есть участвует в движении летательного аппарата вперед, и его вращает силовая установка летательного аппарата. Когда, наоборот, несущий винт является кабрирующим, он находится в режиме автожира, то есть его вращает не силовая установка, а воздушный поток, создаваемый за счет движения летательного аппарата. В этом случае несущий винт создает только подъемную силу.
Следовательно, изменение угла отклонения горизонтального оперения влияет на работу несущего винта и, в частности, на его потребляемую мощность.
Кроме того, в документе FR 2916420 описан гибридный вертолет, содержащий, по меньшей мере, один руль высоты на горизонтальном оперении, углом отклонения которого можно управлять в зависимости от момента изгиба стойки несущего винта. Кроме того, управление циклическим шагом лопастей несущего винта позволяет управлять продольным пространственным положением гибридного вертолета, и подъемная сила крыльев этого гибридного вертолета может быть конкретной процентной частью его общей подъемной силы во время крейсерского полета.
Кроме того, в документе WO 2005/005250 описан гибридный вертолет, крылья которого обеспечивают примерно 70% общей подъемной силы во время крейсерского полета.
Известен также документ FR 2916419, описывающий гибридный вертолет, в котором скорость вращения несущего винта можно снижать во время крейсерского полета. При этом контроль циклического продольного шага лопастей несущего винта позволяет уменьшить лобовое сопротивление фюзеляжа гибридного вертолета. Кроме того, этот вертолет содержит, по меньшей мере, один руль высоты на горизонтальном оперении, углом отклонения которого можно управлять для устранения момента изгиба стойки несущего винта.
Известно также устройство автоматического пилотирования гибридного вертолета, обеспечивающее поддержание аэродинамического угла атаки летательного аппарата постоянным и равным контрольному углу атаки в случае устойчивого крейсерского полета. Для поддержания этого постоянного угла атаки автопилот воздействует на общий шаг лопастей несущего винта.
Точно так же, это устройство позволяет поддерживать продольное пространственное положение летательного аппарата вокруг его оси тангажа постоянным и равным контрольному пространственному положению в случае устойчивого крейсерского полета. В этом случае автопилот воздействует на продольный циклический шаг лопастей несущего винта.
Кроме того, устройство содержит отображение, на котором можно представлять контрольный угол атаки и контрольное пространственное положение. При этом пилот может визуально отслеживать на этом отображении текущие пространственное положение и угол атаки летательного аппарата и, в случае необходимости, их контрольные значения.
Раскрытие изобретения
Объектом настоящего изобретения является способ управления летательным аппаратом с вращающейся несущей поверхностью с высокой скоростью движения, позволяющий управлять одновременно подъемной силой его полукрыльев и его горизонтального оперения во время устойчивой фазы полета. Согласно изобретению, такой летательный аппарат содержит фюзеляж, по меньшей мере, один несущий винт, оборудованный множеством лопастей, по меньшей мере, один тяговый винт изменяемого шага, по меньшей мере, одну несущую поверхность и, по меньшей мере, одну силовую установку, приводящую во вращение несущий винт и каждый тяговый винт. Несущая поверхность может содержать два полукрыла, расположенные с одной и другой стороны фюзеляжа, а также, по меньшей мере, одно горизонтальное оперение, расположенное на конце летательного аппарата и оборудованное, по меньшей мере, одной подвижной поверхностью.
Этот способ позволяет определять заданный общий шаг и заданный продольный циклический шаг, затем регулировать подъемную силу двух полукрыльев таким образом, чтобы общий шаг лопастей несущего винта был равен этому заданному общему шагу во время устойчивой фазы полета. Подъемную силу двух полукрыльев, которая равна сумме подъемной силы каждого полукрыла, регулируют, воздействуя на аэродинамическое средство летательного аппарата.
Действительно, устойчивая фаза полета соответствует полету на постоянных траектории и горизонтальной скорости летательного аппарата, при этом вертикальная скорость является постоянной и даже нулевой в частном случае горизонтального полета. Такой полет можно осуществлять, в частности, при помощи автопилота, имеющегося на летательном аппарате, регулирующего средства управления продольного циклического шага и общего шага лопастей несущего винта летательного аппарата. Автопилот может также регулировать шаг каждого тягового винта.
Таким образом, устойчивую фазу полета можно получить при помощи первого контура регулирования средств управления летательного аппарата, и заявленный способ в этом случае представляет собой второй контур регулирования некоторых из этих средств управления.
Однако полная стабилизация летательного аппарата во время устойчивой фазы полета обеспечивается не оптимально.
Прежде всего, во время полета общая подъемная сила летательного аппарата меняется, в частности, в зависимости от массы летательного аппарата.
Кроме того, объемная масса воздуха, окружающего летательный аппарат, меняется в зависимости от температуры и от высоты, влияя на регулирование подъемной силы летательного аппарата.
Далее, расход топлива облегчает летательный аппарат во время полета. Кроме того, во время выполнения полетного задания производят погрузку и выгрузку грузов или пассажиров, что тоже сказывается на его массе.
Кроме того, общая подъемная сила летательного аппарата действует противоположно его весу, чтобы поддерживать летательный аппарат под действием подъемной силы, при этом вес летательного аппарата определяют путем умножения его массы на ускорение силы тяжести. При этом под «общей подъемной силой» следует понимать подъемную силу, необходимую для уравновешивания веса летательного аппарата.
Когда общая подъемная сила летательного аппарата точно противодействует его весу, летательный аппарат движется с нулевым вертикальным ускорением, то есть с постоянной вертикальной скоростью. Когда эта общая подъемная сила превышает этот вес, летательный аппарат движется с положительным вертикальным ускорением, то есть его скорость набора высоты повышается. И, наоборот, если эта общая подъемная сила меньше этого веса, летательный аппарат движется с отрицательным вертикальным ускорением, то есть повышается скорость его снижения.
Поэтому, чтобы поддерживать устойчивую фазу полета, общую подъемную силу летательного аппарата необходимо постоянно регулировать для адаптации к изменениям массы летательного аппарата и объемной массы воздуха.
Во время полета на умеренной скорости эта общая подъемная сила летательного аппарата в основном представляет собой подъемную силу несущего винта. Что же касается полета на высокой скорости движения, то она в основном представляет собой сумму подъемной силы несущего винта и подъемной силы полукрыльев. Фюзеляж летательного аппарата и его горизонтальное оперение тоже могут оказывать влияние на эту общую подъемную силу летательного аппарата. Однако в дальнейшем это влияние не будет учитываться, так как для большинства летательных аппаратов оно является ничтожным.
По сути дела, во время полета на высокой скорости движения присутствие этих полукрыльев позволяет уменьшить участие несущего винта в общей подъемной силе летательного аппарата. Кроме того, использование, по меньшей мере, одного тягового винта позволяет также уменьшить участие несущего винта в создании тяги летательного аппарата. Следовательно, подъемную силу и тягу несущего винта можно уменьшить, а, значит, можно также уменьшить аэродинамическое лобовое сопротивление несущего винта.
Способ в соответствии с изобретением отличается тем, что позволяет регулировать подъемную силу полукрыльев летательного аппарата таким образом, чтобы привести летательный аппарат к точке оптимизированной работы его несущего винта во время устойчивой фазы полета, сохраняя при этом задачу постоянного вертикального состояния, такого как постоянная вертикальная скорость или постоянный угол атаки, позволяющего ему оставаться в устойчивой фазе полета.
Действительно, несущий винт летательного аппарата имеет, по меньшей мере, одну точку оптимальной работы, которой соответствует пара значений общего шага и продольного циклического шага лопастей несущего винта. Эту точку оптимальной работы несущего винта обычно определяют во время летно-доводочных испытаний летательного аппарата. Кроме всего прочего, она зависит от несущего винта и от полукрыльев летательного аппарата.
Эта пара значений общего шага и продольного циклического шага, соответствующая этой точке оптимальной работы несущего винта, представляет собой заданный общий шаг и заданный продольный циклический шаг. Эти значения могут зависеть, в частности, от скорости движения летательного аппарата и от объемной массы воздуха.
Эта точка оптимальной работы несущего винта может соответствовать аэродинамическому качеству несущего винта, позволяющему, например, минимизировать расход топлива летательного аппарата.
Таким образом, если масса аппарата уменьшается в результате расхода топлива, винт остается зафиксированным на этом заданном общем шаге, тогда как подъемная сила полукрыльев уменьшается, чтобы сохранить задачу вертикального состояния, соответствующего устойчивой фазе полета.
Значения заданного общего шага и заданного циклического шага зависят, в частности, от полукрыльев или от несущего винта, аэродинамическое качество которого ухудшается быстрее при увеличении на него нагрузки.
Например, испытания позволили определить, что точка оптимальной работы несущего винта летательного аппарата в устойчивой фазе полета соответствует мощности, потребляемой несущим винтом и составляющей от 20 до 40% мощности, потребляемой этим несущим винтом в режиме висения.
Согласно другому примеру, для летательного аппарата массой в 7 тонн эта точка оптимальной работы несущего винта может соответствовать подъемной силе несущего винта, необходимой для удержания массы в 3,5 тонны.
Способ в соответствии с изобретением позволяет привести несущий винт к этой точке оптимальной работы в равновесии посредством регулирования подъемной силы двух полукрыльев. Действительно, значение общей подъемной силы летательного аппарата, которое является суммой подъемной силы несущего винта и подъемной силы полукрыльев, отвечает этой задаче вертикального состояния летательного аппарата. Таким образом, подъемную силу несущего винта изменяют, когда регулируют подъемную силу двух полукрыльев, чтобы получить это значение общей подъемной силы. Кроме того, изменение подъемной силы несущего винта получают посредством изменения общего шага лопастей этого несущего винта.
Фактически заявленный способ позволяет регулировать подъемную силу двух полукрыльев, пока общий шаг лопастей несущего винта не уравняется с заданным общим шагом, соответствующим точке оптимальной работы этого несущего винта.
Как уже было указано, общая подъемная сила летательного аппарата противодействует весу летательного аппарата, чтобы поддерживать летательный аппарат под действием подъемной силы, при этом этот вес определяют как массу летательного аппарата, умноженную на ускорение силы тяжести. Кроме того, во время полета эта масса уменьшается, в частности, за счет расхода топлива силовой установкой, следовательно, общая подъемная сила летательного аппарата тоже должна уменьшаться.
Следовательно, чтобы сохранить точку работы несущего винта и соответствующее значение общего шага, при помощи способа регулируют подъемную силу полукрыльев во время устойчивой фазы полета, чтобы компенсировать изменения массы летательного аппарата.
Таким образом, способ позволяет уменьшить рабочую нагрузку пилота за счет автоматического управления подъемной силой полукрыльев для оптимизации равновесия летательного аппарата в устойчивой фазе полета.
Если фазу полета осуществляет вручную пилот, способ в соответствии с изобретением имеет медленное динамическое изменение, чтобы не нарушать пилотирование летательного аппарата.
Точно так же, когда устойчивую фазу полета осуществляет первый контур регулирования средств управления летательного аппарата, второй контур регулирования, которым является заявленный способ, имеет более медленное изменение, чем этот первый контур регулирования, чтобы не нарушать его работы.
Кроме того, заявленный способ позволяет регулировать подъемную силу горизонтального оперения посредством воздействия на средство управления подвижной поверхностью горизонтального оперения таким образом, чтобы продольный циклический шаг лопастей несущего винта был равен заданному продольному циклическому шагу.
Как было указано выше, известно, что изменение подъемной силы горизонтального оперения позволяет сделать несущий винт пикирующим или кабрирующим во время устойчивой фазы полета, при этом пространственное положение (или угол атаки) летательного аппарата является постоянным. В этом случае изменяют продольный циклический шаг, чтобы противодействовать этому влиянию горизонтального оперения, при этом характеристики фазы полета, такие как скорость движения летательного аппарата или его пространственное положение, остаются постоянными.
Следовательно, согласно способу, регулируют подъемную силу горизонтального оперения, пока продольный циклический шаг не станет соответствовать этому заданному значению продольного циклического шага. Подъемную силу горизонтального оперения регулируют посредством воздействия на средство привода каждой подвижной поверхностью горизонтального оперения. Таким образом, способ позволяет, в частности, компенсировать изменения центровки массы летательного аппарата.
Таким образом, способ позволяет уменьшить рабочую нагрузку пилота за счет автоматического управления подъемной силой горизонтального оперения для оптимизации равновесия летательного аппарата в устойчивой фазе полета.
Каждая подвижная поверхность оперения может представлять собой подвижный руль высоты горизонтального оперения. Предпочтительно горизонтальное оперение содержит два руля.
Регулирование подъемной силы полукрыльев и подъемной силы горизонтального оперения получают, таким образом, с низкой частотой, чтобы общее равновесие летательного аппарата приводило к оптимизированной работе его несущего винта во время устойчивой фазы полета, сохраняя при этом задачу постоянного вертикального состояния, такого как постоянной вертикальной скорости или угла атаки, и задачу постоянного продольного пространственного положения, соответствующего этой устойчивой фазе полета.
Кроме того, способ в соответствии с изобретением применяют только в устойчивых фазах полета. Фактически, скорость движения летательного аппарата должна превышать 50 узлов. Кроме того, этот способ следует деактивировать во время изменения маневрирования летательного аппарата, в частности, на виражах. Например, он будет активным только, когда угол крена летательного аппарата меньше 10°. Наконец, чтобы не мешать маневру пилота летательного аппарата, способ деактивируют, как только обнаруживается действие на средства управления летательного аппарата со стороны пилота.
Этот способ позволяет регулировать подъемную силу двух полукрыльев путем воздействия на аэродинамическое средство летательного аппарата.
Это регулирование подъемной силы можно, например, осуществлять за счет изменения аэродинамического угла атаки или просто «угла атаки» полукрыльев летательного аппарата. Если полукрылья являются полностью неподвижными, это изменение угла атаки можно осуществить посредством изменения пространственного положения летательного аппарата. Действительно, поскольку траектория летательного аппарата является неизменной, изменение пространственного положения летательного аппарата и, следовательно, его угла атаки приводит к изменению угла атаки двух полукрыльев. В этом случае аэродинамическое средство летательного аппарата позволяет изменять пространственное положение летательного аппарата.
Полукрылья могут быть также подвижными, например, поворотными, полностью. В этом случае аэродинамическое средство летательного аппарата позволяет приводить в движение полукрылья, например, поворотом без изменения пространственного положения летательного аппарата и, следовательно, изменять угол атаки упомянутых полукрыльев.
Предпочтительно аэродинамическое средство летательного аппарата содержит на каждом полукрыле, по меньшей мере, один подвижный закрылок сзади неподвижной поверхности и, по меньшей мере, одну систему привода каждого закрылка. Это приведение в движение может соответствовать перемещению этих закрылков, например, с изменением площади каждого закрылка, что позволяет, таким образом, изменять подъемную силу полукрыльев, при этом угол атаки полукрыльев остается постоянным. Изменение подъемной силы можно также осуществлять поворотом каждого закрылка с его перемещением или без перемещения.
Кроме того, закрылок каждого полукрыла можно приводить в движение по-разному, чтобы получить разность подъемной силы между двумя полукрыльями. Эта разность подъемной силы между двумя полукрыльями позволяет, например, компенсировать влияние несущего винта, например, во время движения с креном.
Действительно, воздушные потоки, создаваемые при вращении несущего винта, действуют по-разному на два полукрыла, установленные с одной и другой стороны от фюзеляжа летательного аппарата. Эти потоки являются вихревыми и проходят спереди назад на одном полукрыле и сзади вперед на другом полукрыле. Таким образом, они создают асимметрию угла атаки между двумя полукрыльями. По этой причине возникает расхождение подъемной силы между двумя полукрыльями, что приводит к кренению летательного аппарата.
Чтобы компенсировать это расхождение подъемной силы и избежать, таким образом, кренения летательного аппарата, пилот должен постоянно воздействовать на боковой циклический шаг лопастей несущего винта. Предпочтительно способ в соответствии с изобретением позволяет определить разность подъемной силы между каждым полукрылом. Затем способ позволяет приводить в движение каждый закрылок при помощи системы привода, чтобы регулировать подъемную силу двух полукрыльев и получать эту разность.
Таким образом, пилот может больше не заниматься компенсацией асимметрии угла атаки между двумя полукрыльями, создаваемой несущим винтом.
Точно так же, способ позволяет регулировать подъемную силу каждого полукрыла, по-разному приводя в движение каждый закрылок при помощи средства привода закрылков, таким образом, чтобы боковой циклический шаг лопастей несущего винта был равен заданному боковому циклическому шагу. В этом случае получаемая разность подъемной силы между двумя полукрыльями, соответствующая моменту крена винта, позволяет выполнить задачу соблюдения необходимого бокового пространственного положения летательного аппарата. Закрылки полукрыльев приводят в движение с низкой частотой, чтобы привести летательный аппарат к этому боковому шагу. Этот заданный боковой циклический шаг может зависеть от скорости движения летательного аппарата и от объемной массы воздуха.
В другом варианте этого способа при помощи соответствующего датчика измеряют непосредственно момент изгиба стойки несущего винта. Этот момент позволяет определить момент продольного изгиба и момент бокового изгиба стойки несущего винта.
Подъемная сила горизонтального оперения, которая позволяет несущему винту быть пикирующим или кабрирующим, непосредственно влияет на значение этого момента продольного изгиба. Фактически способ позволяет регулировать подъемную силу горизонтального оперения, пока этот момент продольного изгиба не станет равным заданному моменту продольного изгиба. В этом случае горизонтальное оперение позволяет осуществлять устойчивую фазу полета с моментом изгиба стойки несущего винта, соответствующим этому заданному моменту продольного изгиба, например, чтобы уменьшить продольные напряжения стойки несущего винта. В данном случае также регулируют продольный циклический шаг и общий шаг для поддержания неизменными условий полета.
Точно так же можно регулировать момент бокового изгиба стойки несущего винта, по-разному управляя закрылками двух полукрыльев, чтобы получить разность подъемной силы между двумя полукрыльями. Действительно, разные значения подъемной силы на каждом полукрыле позволяют создать момент крена, который может противостоять этому моменту бокового изгиба. Фактически, способ регулирует подъемную силу каждого полукрыла, пока момент бокового изгиба стойки несущего винта не станет равным заданному моменту бокового изгиба, например, чтобы уменьшить боковые напряжения стойки несущего винта.
Регулирование подъемной силы двух полукрыльев осуществляют посредством воздействия на систему привода каждого закрылка. Заданные моменты продольного изгиба и бокового изгиба зависят от условий полета.
В варианте выполнения изобретения на средстве визуализации летательного аппарата отображают информацию, касающуюся текущих значений общего и циклического шага лопастей несущего винта, а также заданного общего шага и заданных продольного и бокового циклических шагов, по меньшей мере, одну информацию, касающуюся закрылков двух полукрыльев, и, по меньшей мере, одну информацию, касающуюся горизонтального оперения.
Действительно, чтобы помочь пилоту оптимизировать работу летательного аппарата, на это средство визуализации индицируют информацию, которая позволяет ему оптимально регулировать общий и циклические шаги лопастей несущего винта, а также положения закрылков полукрыльев и горизонтального оперения.
Для этого на первом графике выводят первую точку, соответствующую паре текущих значений общего шага и продольного циклического шага лопастей несущего винта. Продольный циклический шаг находится на оси абсцисс, а общий шаг - на оси ординат этого первого графика. На первом графике показывают также вторую точку, соответствующую паре из заданного общего шага и заданного продольного циклического шага.
Кроме того, на второй график, содержащий только одну ось, показывающую боковой циклический шаг, отображают третью точку, соответствующую текущему значению бокового циклического шага лопастей несущего винта, а также четвертую точку, соответствующую заданному боковому циклическому шагу.
Затем, чтобы информировать пилота об уровне подъемной силы полукрыльев, на средстве визуализации отображают среднее положение закрылков двух полукрыльев, а также разность положений между этими закрылками. Среднее положение закрылков соответствует положению закрылков, идентичному для каждого полукрыла, позволяющему получить подъемную силу полукрыльев. Разность положений между закрылками соответствует разности подъемной силы двух полукрыльев, позволяющей компенсировать асимметрию угла атаки, создаваемую несущим винтом между двумя полукрыльями.
На средстве визуализации отображают также положение подвижной поверхности (руля высоты) горизонтального оперения, соответствующее подъемной силе оперения.
Наконец, на этом средстве визуализации отображают заданные значения углов отклонения рулей, например, в виде стрелок, предназначенных для пилота. Эта заданные значения углов поворота указывают пилоту, когда он берет на себя ручное управление полетом, в каком направлении приводить в движение закрылок каждого полукрыла и подвижную поверхность горизонтального оперения, чтобы несущий винт пришел к своей точке оптимальной работы.
Объектом изобретения является также летательный аппарат с вращающейся несущей поверхностью с высокой скоростью движения в устойчивой фазе полета, выполненный с возможностью применения вышеупомянутого способа управления.
Такой летательный аппарат содержит фюзеляж, по меньшей мере, один несущий винт, оборудованный множеством лопастей, по меньшей мере, один тяговый винт изменяемого шага, по меньшей мере, одну несущую поверхность и, по меньшей мере, одну силовую установку, приводящую во вращение несущий винт и каждый тяговый винт.
Эта несущая поверхность содержит, по меньшей мере, два полукрыла, расположенные с одной и другой стороны фюзеляжа, и, по меньшей мере, одно аэродинамическое средство, предназначенное для изменения подъемной силы полукрыльев. Кроме того, эта несущая поверхность содержит, по меньшей мере, одно горизонтальное оперение, расположенное на конце летательного аппарата и содержащее, по меньшей мере, одну подвижную поверхность, а также, по меньшей мере, одно средство привода этой подвижной поверхности.
Аэродинамическое средство летательного аппарата позволяет регулировать подъемную силу двух полукрыльев таким образом, чтобы общий шаг лопастей несущего винта был равен заданному общему шагу во время устойчивой фазы полета. Этот заданный общий шаг соответствует точке оптимальной работы несущего винта.
В варианте выполнения изобретения средство привода подвижной поверхности оперения позволяет приводить в движение эту подвижную поверхность, регулируя таким образом подъемную силу горизонтального оперения так, чтобы продольный циклический шаг лопастей несущего винта был равен заданному продольному циклическому шагу во время устойчивой фазы полета. Этот заданный продольный циклический шаг соответствует такой же точке оптимальной работы несущего винта.
Согласно варианту выполнения изобретения, аэродинамическое средство летательного аппарата содержит, по меньшей мере, один подвижный закрылок на каждом полукрыле и, по меньшей мере, одну систему привода каждого закрылка. Каждая система привода позволяет приводить в движение закрылки, чтобы регулировать подъемную силу каждого полукрыла.
В варианте выполнения изобретения летательный аппарат содержит средство визуализации, отображающее информацию, позволяющую пилоту оптимизировать работу летательного аппарата.
Действительно, это средство визуализации содержит два графика, показывающие информацию, касающуюся общего и циклического шага лопастей несущего винта. На первом графике это средство визуализации отображает первую точку, соответствующую паре текущих значений общего шага и продольного циклического шага лопастей несущего винта, а также вторую точку, соответствующую паре из заданного общего шага и заданного продольного циклического шага. Продольный циклический шаг находится на оси абсцисс, а общий шаг - на оси ординат этого первого графика.
На втором графике, содержащим только одну ось, показывающую боковой циклический шаг, отображают третью точку, соответствующую текущему значению бокового циклического шага лопастей несущего винта, и четвертую точку, соответствующую заданному боковому циклическому шагу.
Кроме того, чтобы информировать пилота об уровне подъемной силы полукрыльев, это средство визуализации показывает среднее положение закрылков двух полукрыльев, а также разность положений между этими закрылками, соответствующую разности подъемной силы двух полукрыльев, позволяющей компенсировать асимметрию угла атаки, создаваемую несущим винтом между двумя полукрыльями.
Наконец, это средство визуализации отображает также положение подвижной поверхности горизонтального оперения, соответствующее подъемной силе оперения.
Это средство визуализации отображает также активированный режим работы на уровне закрылков и горизонтального оперения. Действительно, система привода, обеспечивающая приведение в движение закрылков каждого полукрыла, может управляться автопилотом, присутствующим на летательном аппарате, или самим пилотом. Эта система привода может выйти из строя и, следовательно, не работать. Таким образом, это средство визуализации позволяет, таким образом, индицировать, какой режим пилотирования активирован, или на то, что эта система привода не работает. Это же относится и к средству привода горизонтального оперения.
Наконец, это средство визуализации отображает заданные значения отклонения, например, в виде стрелок, предназначенных для пилота. Эти заданные значения отклонения указывают пилоту, в каком направлении приводить в движение закрылки каждого полукрыла и подвижную поверхность горизонтального оперения, чтобы привести несущий винт к его точке оптимальной работы.
Краткое описание чертежей
Изобретение и его преимущества будут более очевидны из нижеследующего описания иллюстративных примеров выполнения со ссылками на прилагаемые чертежи, на которых:
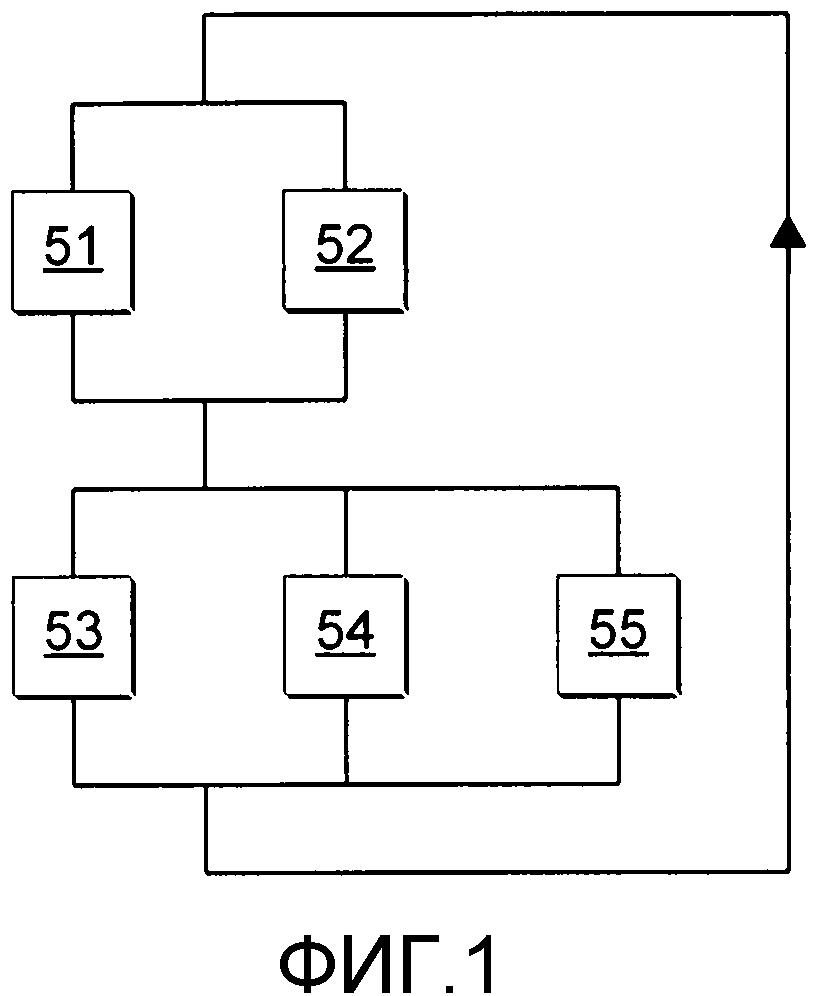
Фиг. 1 - блок-схема осуществления заявленного способа.
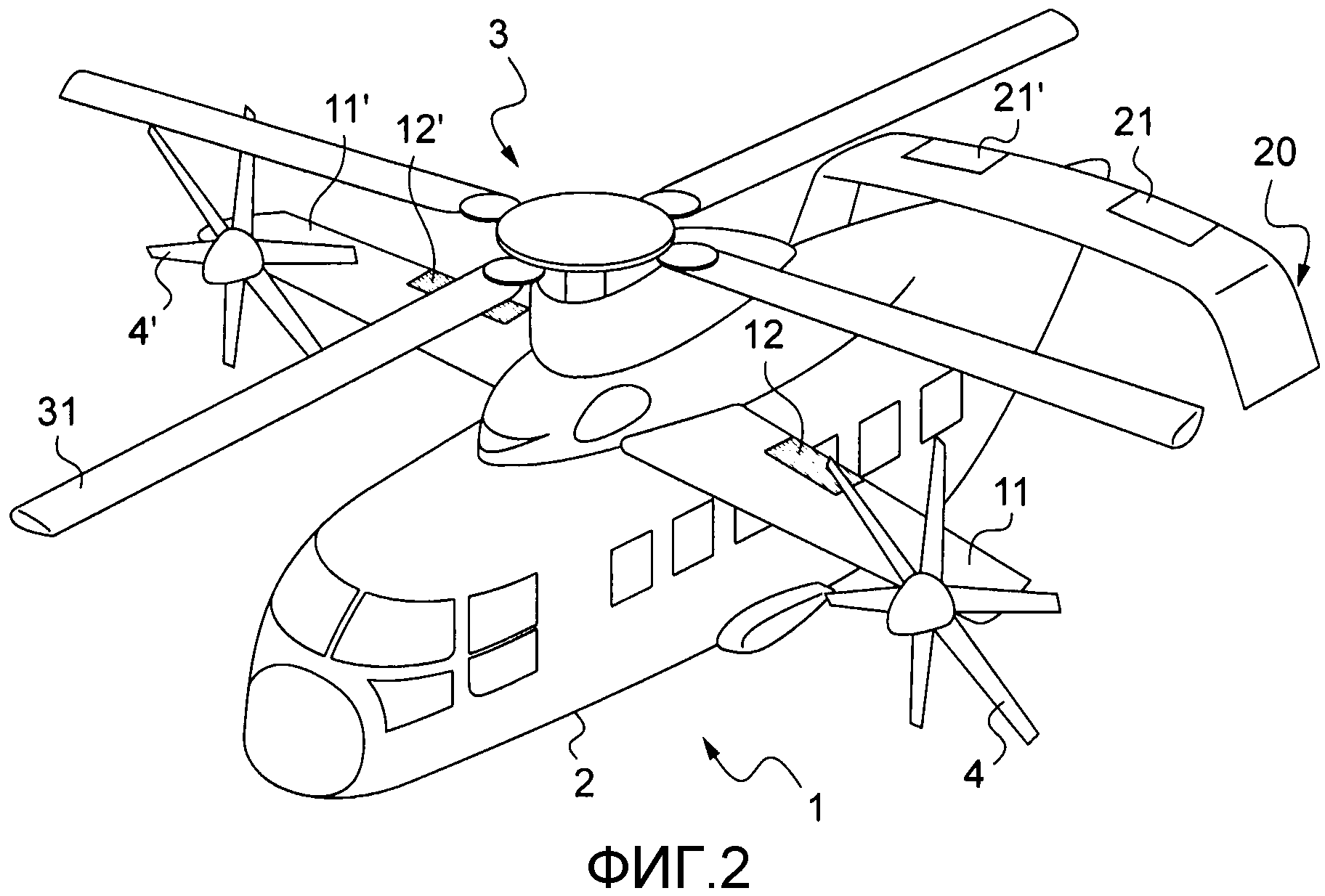
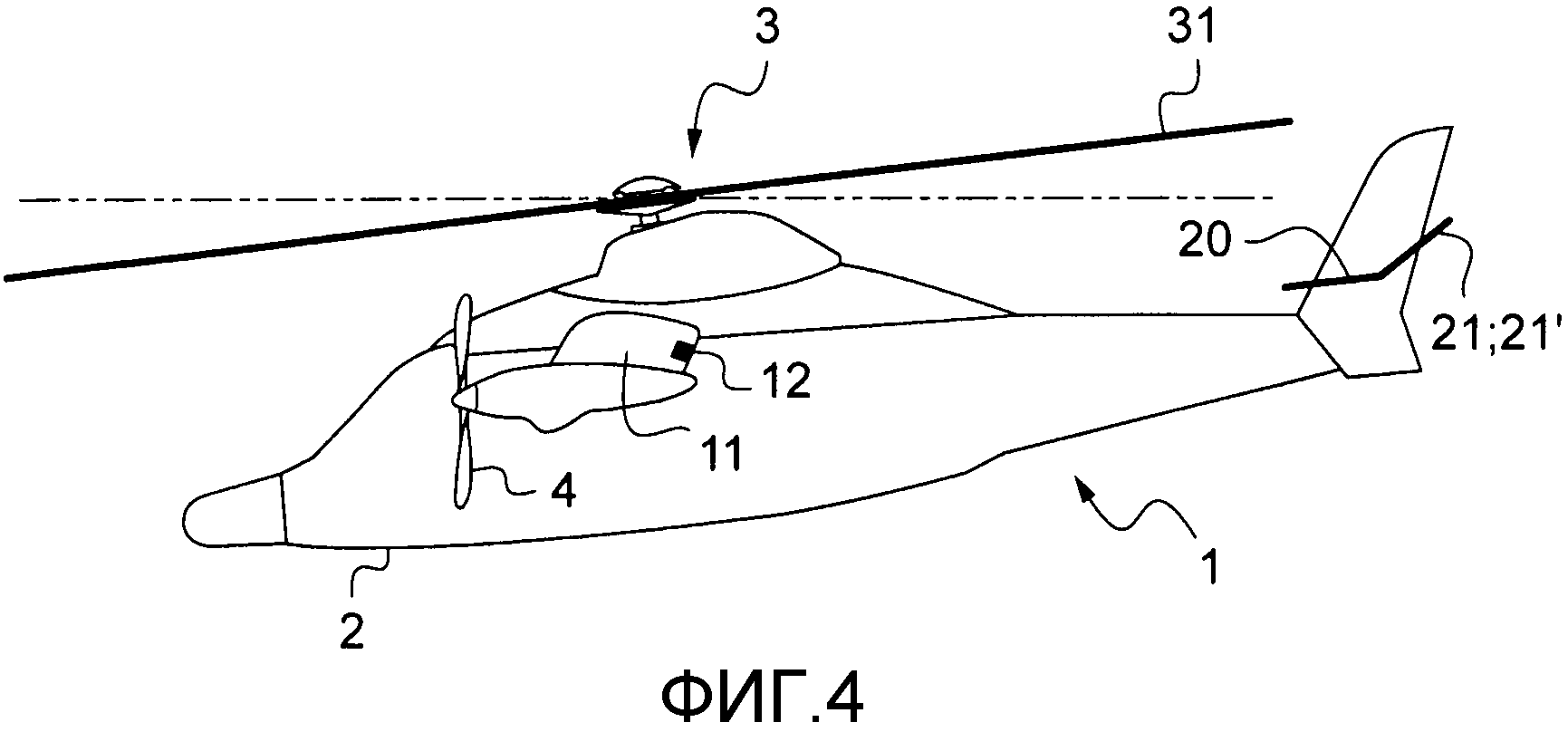
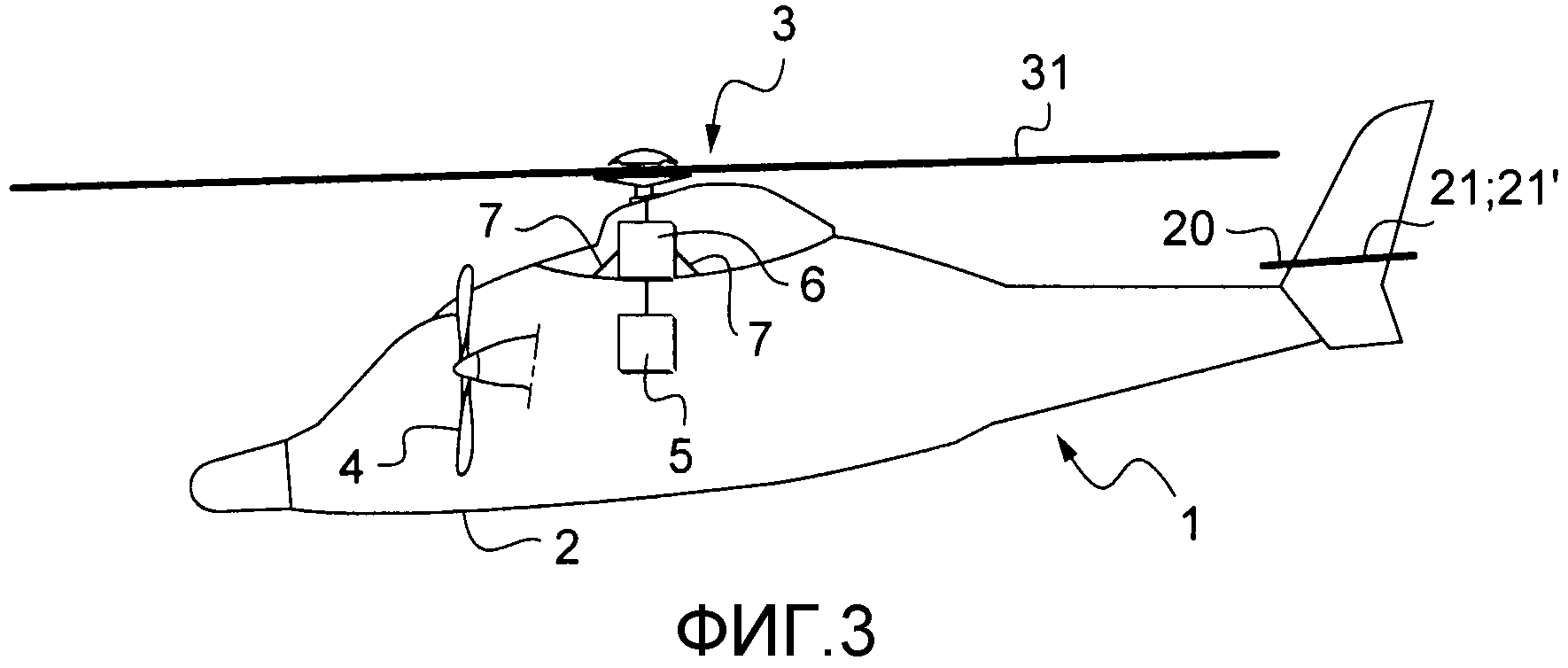
Фиг. 2-4 - летательный аппарат, выполненный с возможностью применения заявленного способа.
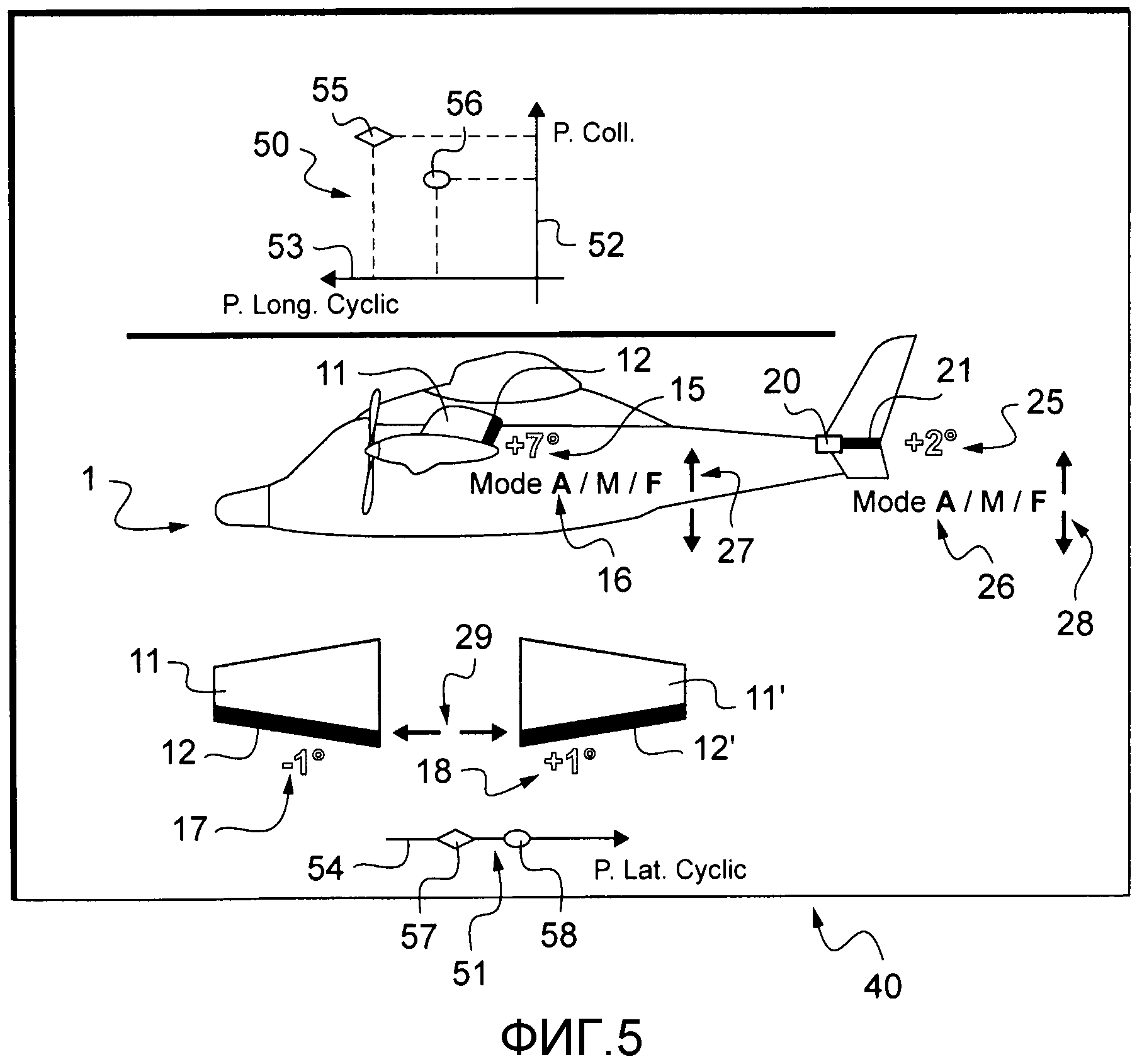
Фиг. 5 - средство визуализации этого летательного аппарата.
Одни и те же элементы на разных фигурах обозначены одинаковыми позициями.
Варианты осуществления изобретения
На фиг. 1 представлен способ управления летательным аппаратом 1 с вращающейся несущей поверхностью с высокой скоростью движения, который включает в себя несколько этапов. На фиг. 2-4 представлен летательный аппарат 1 с вращающейся несущей поверхностью с высокой скоростью движения, выполненный с возможностью применения способа управления в соответствии с изобретением.
Этот способ позволяет регулировать подъемную силу полукрыльев 11, 11' и горизонтального оперения 20 во время устойчивой фазы полета летательного аппарата 1. Во время такой устойчивой фазы полета основные параметры полета летательного аппарата 1 являются постоянными, в частности, его траектория и его угол атаки, а также скорость его движения. Кроме того, этот способ активируют на летательном аппарате 1, только когда угол крена летательного аппарата 1 меньше 10° и скорость движения летательного аппарата 1 превышает 50 узлов, при этом пилот не оказывает никакого действия на средства управления летательного аппарата 1.
Такой летательный аппарат 1, показанный на фиг. 2 и 3, содержит фюзеляж 2, несущий винт 3, оборудованный множеством лопастей 31, два тяговых винта 4, 4' изменяемого шага, два полукрыла 11, 11', расположенные с одной и другой стороны фюзеляжа 2, горизонтальное оперение 20, расположенное на заднем конце летательного аппарата 1, и силовую установку 5, приводящую во вращение несущий винт 3 и тяговые винты 4, 4'. Силовая установка 5 соединена, в частности, с несущим винтом 3 через главный редуктор 6, который закреплен на фюзеляже 2 летательного аппарата 1 при помощи множества крепежных штанг 7.
Полукрылья 11, 11' содержат аэродинамическое средство, предназначенное для регулирования подъемной силы каждого полукрыла. Это аэродинамическое средство содержит закрылок 12, 12' на каждом полукрыле 11, 11', а также систему привода каждого закрылка 12, 12'. Горизонтальное оперение 20 содержит две подвижные поверхности 21, 21', которые можно приводить в движение при помощи средства привода подвижных поверхностей 21, 21'. Привод каждого закрылка 12, 12' и подвижных поверхностей 21, 21' соответственно приводит к регулированию подъемной силы каждого полукрыла 11, 11' и горизонтального оперения 20.
Описанный со ссылками на фиг. 1 способ включает в себя четыре этапа.
На этапе 51 определяют заданный общий шаг и заданный продольный циклический шаг, соответствующие точке оптимальной работы несущего винта 1. Как правило, эту точку оптимальной работы определяют во время летно-доводочных испытаний летательного аппарата 1. Кроме всего прочего, она зависит от несущего винта 3 и от полукрыльев 11, 11' летательного аппарата 1. Эта точка оптимальной работы несущего винта 3 может соответствовать аэродинамическому качеству несущего винта 3, позволяющему, например, минимизировать расход топлива летательного аппарата.
Одновременно с этапом 51 на этапе 52 определяют разность подъемной силы между каждым полукрылом 11, 11', чтобы компенсировать влияние несущего винта 3 на каждое полукрыло 11, 11'. Действительно, воздушные потоки, создаваемые вращением несущего винта 3, по-разному действуют на два полукрыла 11, 11', расположенные с одной и другой стороны фюзеляжа 2 летательного аппарата 1, и создают, таким образом, асимметрию угла атаки между двумя полукрыльями 11, 11'. Фактически это расхождение подъемной силы появляется между каждым полукрылом 11, 11' и приводит к крену летательного аппарата 1.
На этапе 52 определяют разность подъемной силы между каждым полукрылом 11, 11', чтобы компенсировать это расхождение подъемной силы и избежать, таким образом, кренения летательного аппарата 1.
Во время этапа 53 подъемную силу полукрыльев 11, 11' регулируют таким образом, чтобы общий шаг лопастей несущего винта 3 был равен заданному общему шагу, определенному на этапе 51. Подъемную силу двух полукрыльев 11, 11', которая равна сумме подъемной силы каждого полукрыла 11, 11', регулируют посредством воздействия на аэродинамическое средство летательного аппарата 1.
Одновременно с этапом 53 на этапе 54 регулируют подъемную силу горизонтального оперения 20, чтобы продольный циклический шаг лопастей несущего винта 3 был равен заданному продольному циклическому шагу, определенному на этапе 51.
Действительно, как показано на фиг. 4, изменение подъемной силы оперения 20, полученное в результате перемещения подвижных поверхностей 21, 21', изменяет наклон несущего винта 3, поскольку летательный аппарат 1 находится в устойчивой фазе полета. В зависимости от этого наклона несущий винт 3 может быть пикирующим, как показано на фиг. 4, или кабрирующим с точки зрения момента тангажа, при этом общий и циклический шаги лопастей несущего винта 3 изменяют таким образом, чтобы сохранять постоянные параметры устойчивой фазы полета. При этом регулирование подъемной силы оперения 20 приводит к изменению продольного пространственного положения летательного аппарата 1. Следовательно, подъемную силу оперения 20 можно регулировать таким образом, чтобы продольный циклический шаг лопастей несущего винта 3 был равен заданному продольному циклическому шагу.
Согласно варианту этого этапа 54, подъемную силу горизонтального оперения 20 регулируют таким образом, чтобы момент продольного изгиба стойки несущего винта 3 был равен заданному моменту продольного изгиба. Действительно, можно измерять момент изгиба стойки несущего винта 3, в частности, в случае летательного аппарата с жесткой втулкой. Затем изменение подъемной силы оперения 20 меняет наклон несущего винта 3 и, следовательно, влияет на изгиб стойки этого несущего винта 3. Фактически, регулируя подъемную силу оперения 20, можно привести момент продольного изгиба стойки несущего винта к заданному моменту продольного изгиба, чтобы этот момент изгиба был слабым и даже, например, нулевым, и ограничить, таким образом, напряжения этой стойки.
Наконец, одновременно с этапами 53 и 54 на этапе 55 на средстве 40 визуализации, показанном на фиг. 5, отображают информацию 50 и 51, касающуюся общего и циклического шагов лопастей 31 несущего винта 3, по меньшей мере, одну информацию 15, 16, 17 и 18, касающуюся закрылков 12, 12' двух полукрыльев 11, 11', и, по меньшей мере, одну информацию 25 и 26, касающуюся горизонтального оперения 20. Эта информация 50 состоит из первого графика, на котором показаны первая точка 56, соответствующая паре текущих значений общего шага и продольного циклического шага лопастей несущего винта, и вторая точка 55, соответствующая паре из заданного общего шага и заданного продольного циклического шага. Продольный циклический шаг находится на оси абсцисс 53, а общий шаг - на оси ординат 52 первого графика.
Кроме того, информация 51 состоит из второго графика, содержащего только одну ось 54, показывающую боковой циклический шаг лопастей 31 несущего винта 3. На этом втором графике отображают третью точку 58, соответствующую текущему значению бокового циклического шага лопастей 31 несущего винта 3, и четвертую точку 57, соответствующую заданному боковому циклическому шагу.
Это средство 40 визуализации показывает также активированный режим работы 16 на уровне закрылков 12, 12' и горизонтального оперения 20. Действительно, система привода, которая обеспечивает приведение в движение закрылков 12, 12', может управляться автопилотом, имеющимся на летательном аппарате, или вручную пилотом. Эта система привода может выйти из строя и, следовательно, не работает. При этом средство 40 визуализации отображает для закрылков 12, 12' информацию 16 или появляется «Режим А», когда включен автопилот, «Режим М», когда закрылками 12, 12' управляет вручную пилот, и «Режим F», когда система привода вышла из строя. Это же касается и средства привода горизонтального оперения 20.
Наконец, это средство 40 визуализации показывает заданные значения отклонения 27, 28, 29, например, в виде стрелок, предназначенных для пилота. Таким образом, эти заданные значения отклонения 27, 28, 29 показывают пилоту, когда он производит пилотирование вручную, в каком направлении приводить в движение закрылки 12, 12' каждого полукрыла 11, 11' и подвижные поверхности 21, 21' горизонтального оперения 20, чтобы привести несущий винт 3 к точке его оптимальной работы.
Эта информация позволяет пилоту оптимизировать работу летательного аппарата 1.
Естественно, в настоящее изобретение можно вносить различные изменения с точки зрения его осуществления. Выше были описаны несколько вариантов выполнения, но понятно, что все возможные варианты невозможно идентифицировать исчерпывающе. Разумеется, можно предусмотреть замену одного описанного средства эквивалентным средством, не выходя за рамки настоящего изобретения.
Например, регулирование подъемной силы двух полукрыльев 11, 11', которую в описанном варианте выполнения осуществляют при помощи аэродинамического средства, которое содержит закрылки 12, 12' и приводные системы, можно производить полностью путем поворота этих полукрыльев 11, 11', которые не содержат закрылков. Это регулирование можно также осуществлять при помощи полукрыльев 11, 11' без закрылков, неподвижных относительно фюзеляжа 2 летательного аппарата 1, и посредством изменения пространственного положения летательного аппарата 1.
Точно так же, регулирование подъемной силы горизонтального оперения 20, осуществляемое в описанном варианте выполнения при помощи двух подвижных поверхностей 21, 21' и средства привода, можно производить за счет подвижности всего горизонтального оперения 20.
Способ автоматического пилотирования летательного аппарата с несущим винтом, содержащего, по меньшей мере, один толкающий винт, устройство автоматического пилотирования и летательный аппарат
Способ содействия пилотированию, устройство содействия пилотированию и летательный аппарат
Высокоскоростной летательный аппарат с большой дальностью полета
Гибридный летательный аппарат с вращающейся несущей поверхностью
Лопасть винта, винт, летательный аппарат и способ
Способ регулирования скорости движения гибридного вертолета
Устройство для защиты человека, сидящего на сиденье, сиденье и транспортное средство
Способ управления закрылками крыльев и горизонтальным оперением гибридного вертолета
Способ помощи пилоту однодвигательного винтокрылого летательного аппарата в режиме авторотации
Способ и летательный аппарат с вращающейся несущей поверхностью, оборудованный двумя основными газотурбинными двигателями и менее мощным вспомогательным газотурбинным двигателем
Способ автоматического пилотирования летательного аппарата с несущим винтом, содержащего, по меньшей мере, один толкающий винт, устройство автоматического пилотирования и летательный аппарат
Способ содействия пилотированию, устройство содействия пилотированию и летательный аппарат
Высокоскоростной летательный аппарат с большой дальностью полета
Гибридный летательный аппарат с вращающейся несущей поверхностью
Лопасть винта, винт, летательный аппарат и способ
Способ регулирования скорости движения гибридного вертолета
Устройство для защиты человека, сидящего на сиденье, сиденье и транспортное средство
Способ управления закрылками крыльев и горизонтальным оперением гибридного вертолета
Способ помощи пилоту однодвигательного винтокрылого летательного аппарата в режиме авторотации
Способ и летательный аппарат с вращающейся несущей поверхностью, оборудованный двумя основными газотурбинными двигателями и менее мощным вспомогательным газотурбинным двигателем

