Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ АВТОМАТИЗИРОВАННОЙ ЗАМЕНЫ И ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ
Вид РИД
Изобретение
Изобретение относится к области электротехники.
Известно легкое многоцелевое гусеничное шасси с универсальным корпусом (МТ-ЛБу), которое предназначено для монтажа объектов техники, а также для доставки людей и грузов по сильнопересеченной и труднодоступной местности. В изобретении оно принято в качестве базовой машины (См. Легкое многоцелевое гусеничное шасси МТ-Лбу. Техническое описание и инструкция по эксплуатации. - М.: Воениздат, 1978. с 3-27).
Известно устройство для заряда аккумуляторных батарей с использованием потоков жидкости или газа (патент на полезную модель №113789). Основными составляющими элементами устройства для заряда аккумуляторных батарей с использованием потоков жидкости или газа являются генераторный блок, зарядно-преобразовательный блок и блок автоматической замены аккумуляторных батарей (АКБ).
Данное техническое решение является по существенным признакам наиболее близким к заявляемому изобретению и принято за прототип.
Оно может использоваться для заряда и замены аккумуляторных батарей, но из-за отсутствия средств управления и диагностики не обеспечивается дифференциация режимов его работы.
Задачей предлагаемого изобретения является обеспечение непрерывной работы персонала за счет способа, позволяющего дифференцировать режимы работы с аккумуляторными батареями средств связи и автоматизации (далее по тексту - носителей), для выполнения персоналом работ в труднодоступных районах (местах).
Технический результат изобретения достигается путем создания системы, позволяющей производить размещение, идентификацию и следующий за ней выбор режима работы, включающий замену, выдачу и прием аккумуляторных батарей.
Техническим решением изобретения является система, размещенная в корпусе базовой машины, содержащая блок присоединения, блок привода, ленты крепления, токопроводы, микрокомпьютер, автоматы переключения лент, блок хранения неисправных АКБ, ленту замены.
Блок присоединения включает в себя механизм контракции и экстракции для присоединения и отсоединения АКБ к (от) носителю (я), модуль датчиков для определения состояния и типа АКБ, а также размещения носителя. Модуль датчиков обеспечивает диагностику подключаемого объекта (АКБ и (или) его носитель, ключ-макет аккумуляторной батареи) за счет фигурных выступов и пазов в конструкциях АКБ, носителя и блока присоединения.
Блок привода обеспечивает работу лентопротяжного механизма за счет использования двигателя постоянного тока. Механизм привода лент обеспечивает их движение.
Лента крепления обеспечивает размещение аккумуляторных батарей. Лента крепления для заряда аккумуляторных батарей оборудована токопроводами. Установка аккумуляторных батарей на ленту крепления с токопроводом и подключение к сети заряда происходит одновременно.
Токопроводы подключены к генератору базовой машины.
Микрокомпьютер обеспечивает управление работой системы.
Автоматы переключения лент обеспечивают сортировку АКБ по типам за счет выборочного кратковременного присоединения к лентопротяжному механизму лент крепления и ленты замены с размещенными на них аккумуляторными батареями и наоборот.
Блок хранения неисправных АКБ обеспечивает размещение АКБ без их заряда за счет использования лент крепления без токопровода.
Лента замены служит для транспортировки аккумуляторных батарей от лент крепления к блоку присоединения и обратно.
Количество лент крепления может варьироваться в зависимости от количества типов АКБ и соответствующего им количества автоматов переключения лент.
Ленты с аккумуляторными батареями размещены внутри корпуса вдоль его борта.
Заявляемый способ автоматизированной замены и заряда аккумуляторных батарей заключается в том, что после размещения объекта (носитель с АКБ, идентификационная сторона носителя АКБ, АКБ, ключ-макет аккумуляторной батареи) в блок присоединения происходит идентификация объекта и выбор режима работы системы автоматизированной замены и заряда аккумуляторных батарей.
Изобретение поясняется фиг. 1, фиг. 2 и фиг. 3.
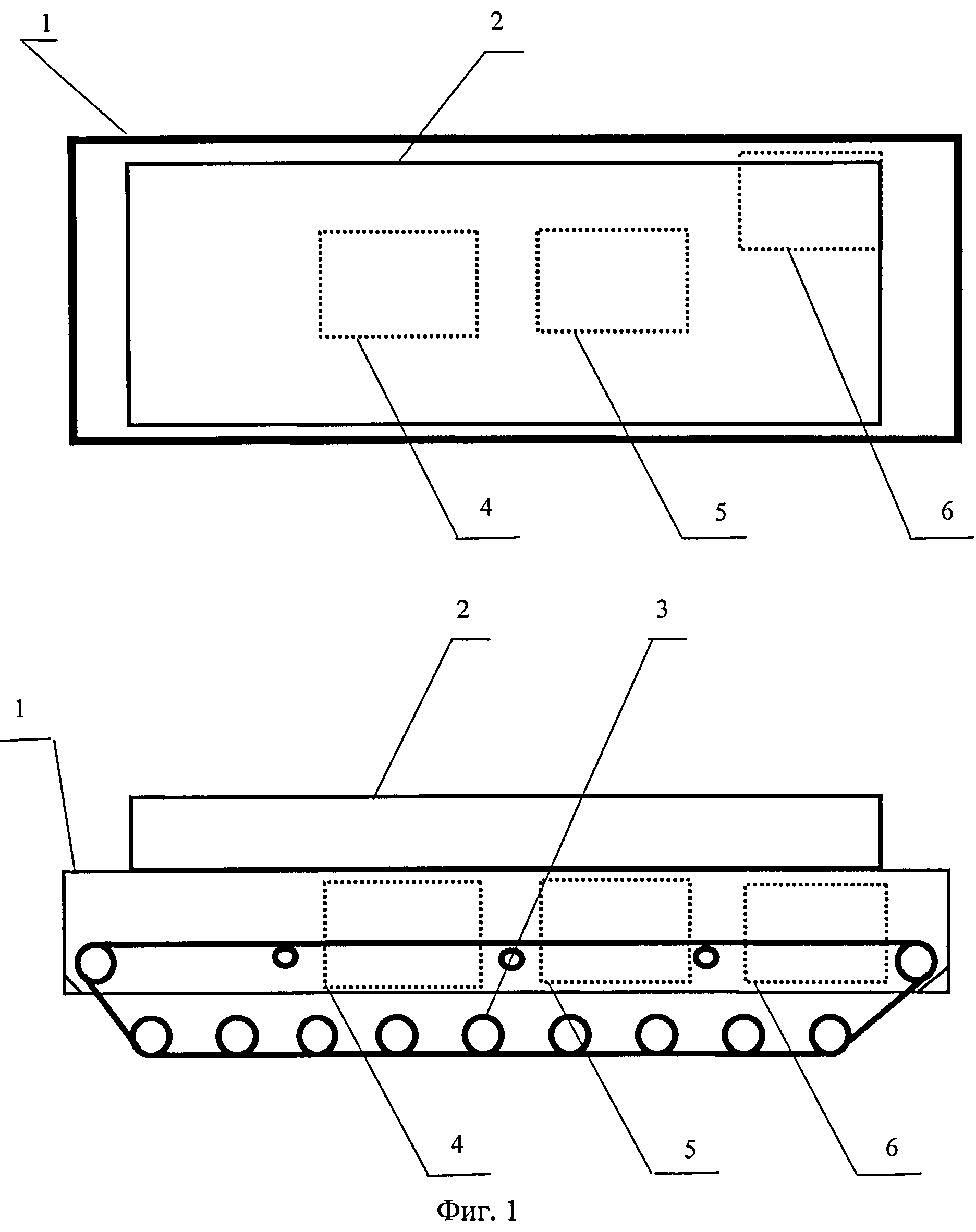
На фиг. 1 представлено:
1 - базовая машина;
2 - корпус;
3 - ходовая часть;
4 - силовое отделение;
5 - генератор;
6 - система автоматизированной замены и заряда аккумуляторных батарей.
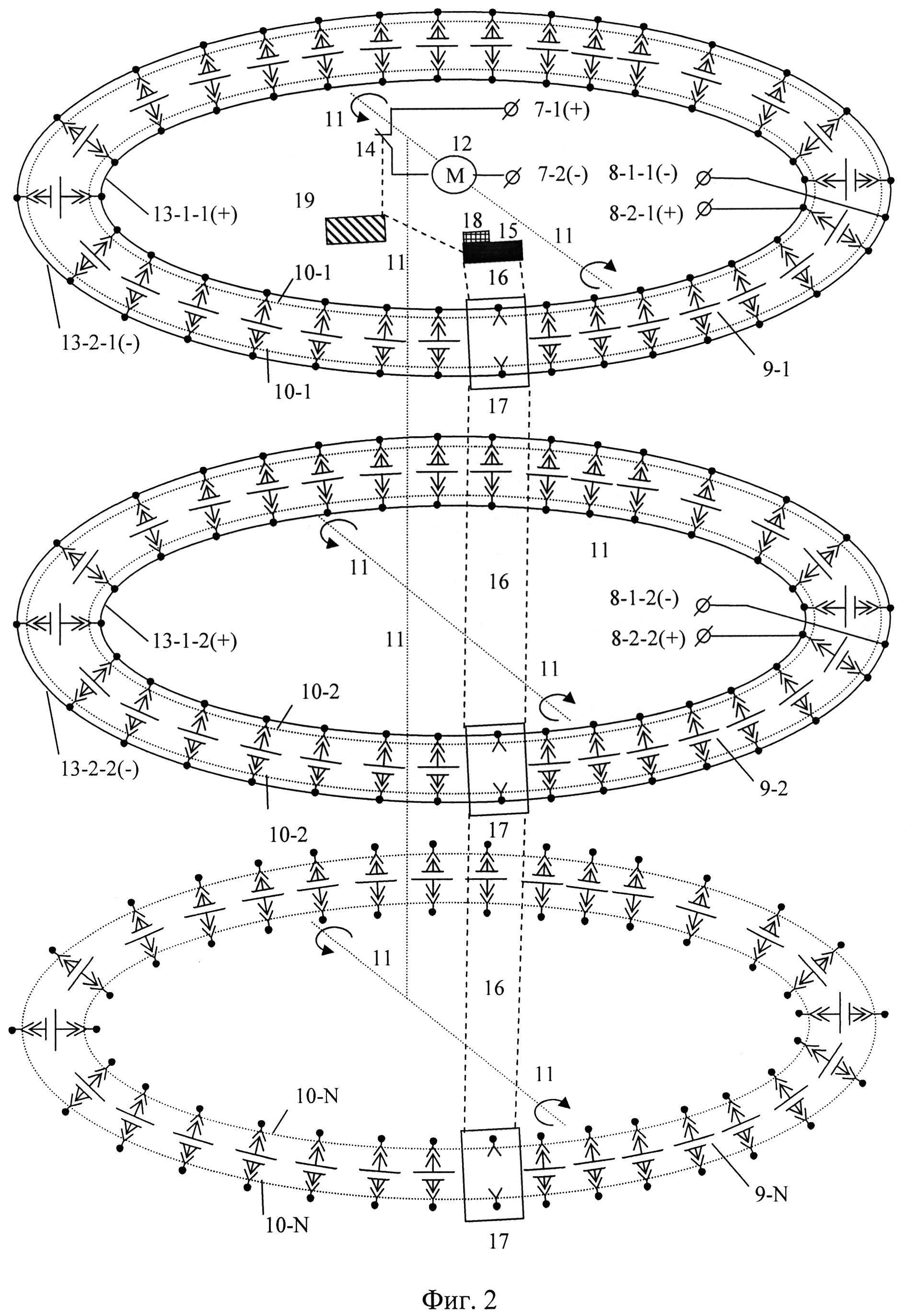
На фиг. 2 показана электрическая схема заряда аккумуляторных батарей.
7-1 - плюсовой вывод шины питания двигателя постоянного тока;
7-2 - минусовой вывод шины питания двигателя постоянного тока;
8-1-1, 8-1-2 - плюсовые выводы шин заряда аккумуляторных батарей;
8-2-1, 8-2-2 - минусовые выводы шин заряда аккумуляторных батарей;
9-1 - аккумуляторная батарея, тип 1;
9-2 - аккумуляторная батарея, тип 2;
9-N - аккумуляторная батарея неисправная;
10-1, 10-2, 10-N - лента крепления;
11 - механический привод;
12 - двигатель постоянного тока;
13-1-1, 13-1-2- плюсовые шины токопровода;
13-2-1, 13-2-2 - минусовые шины токопровода;
14 - выключатель двигателя постоянного тока;
15 - блок присоединения;
16 - лента замены;
17 - автомат переключения лент;
18 - модуль датчиков;
19 - микрокомпьютер;
20 - объект.
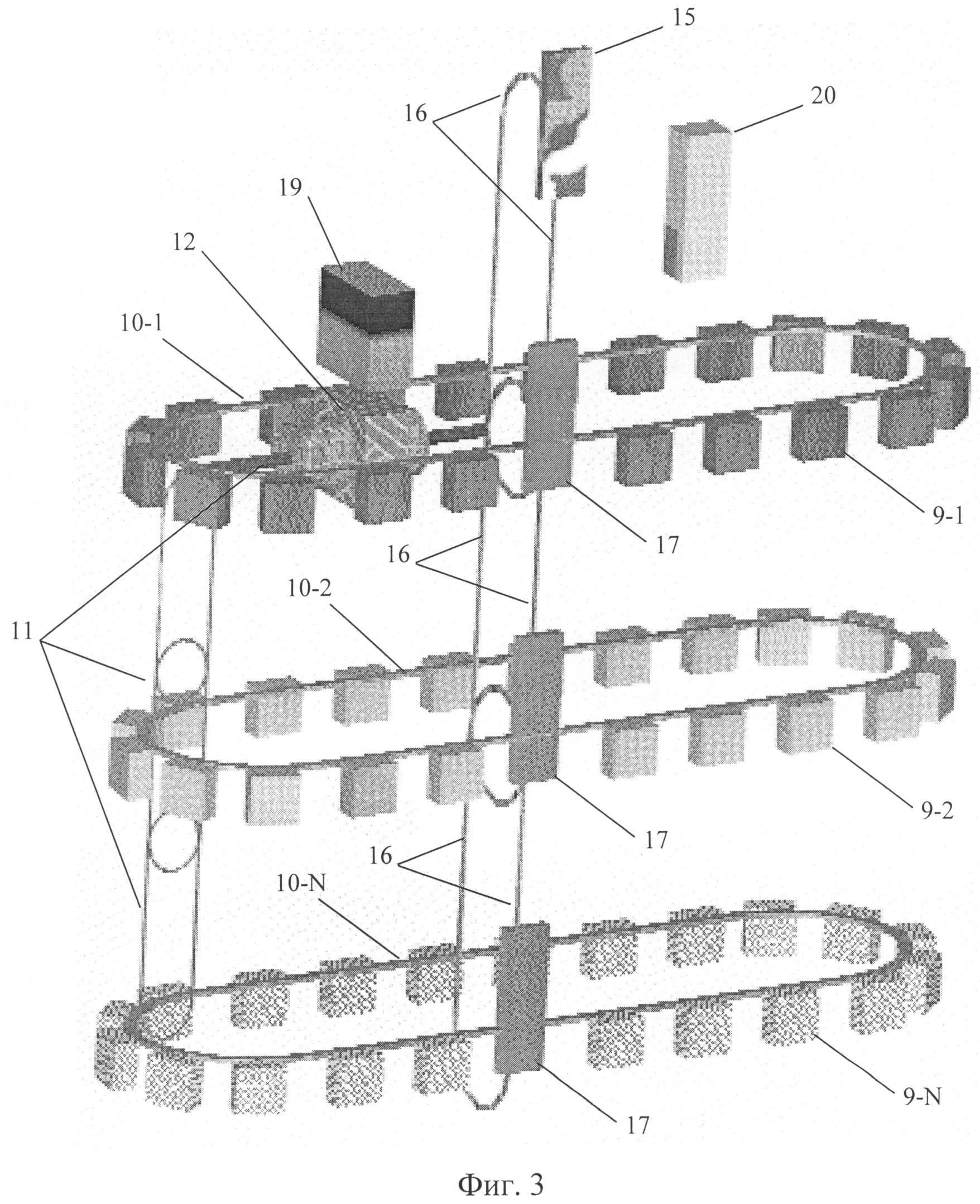
На фиг. 3 показан макет системы автоматизированной замены и заряда аккумуляторных батарей.
Базовая машина 1 содержит корпус 2, кабину управления, силовое отделение 4, системы обеспечения движения (силовая передача, ходовая часть 3 и др.), генератор 5, контрольно-измерительные приборы, средства связи и специальное оборудование, а также систему автоматизированной замены и заряда аккумуляторных батарей 6. Система автоматизированной замены и заряда аккумуляторных батарей содержит шины питания двигателя постоянного тока с плюсовым 7-1 и минусовым 7-2 выводами, шины заряда аккумуляторных батарей с плюсовой 8-1-1 (8-1-2) и минусовой 8-2-1 (8-2-2) шинами, аккумуляторную батарею 9-1 (9-2, 9-N), ленту крепления 10-1 (10-2, 10-N), механический привод 11 движения ленты крепления 10-1 (10-2, 10-N), двигатель постоянного тока 12, токопровод с плюсовой 13-1-1 (13-1-2) и минусовой 13-2-1 (13-2-2) шинами, выключатель двигателя постоянного тока 14, блок присоединения 15, ленту замены 16, автомат переключения лент 17, модуль датчиков 18, микрокомпьютер 19, причем плюсовой вывод шины питания 7-1 подключен к двигателю постоянного тока 12 через выключатель 14, имеющий механическую связь с блоком присоединения 15, а вывод 7-2 подключен непосредственно к двигателю постоянного тока 12, который посредством механической связи с приводом 11, соединен с лентой крепления 10-1 (10-2, 10-N). На ленте крепления 10-1 (10-2) закреплены плюсовой 13-1-1 (13-1-2) и минусовой 13-2-1 (13-2-2) токопроводы, к которым подключены соответственно плюсовыми и минусовыми контактами аккумуляторные батареи 9-1 (9-2), подключенные соответственно к плюсовой 8-1-1 (8-1-2) и минусовой 8-2-1 (8-2-2) шинам заряда аккумуляторных батарей. Питание шин 7-1, 7-2, 8-1-1 (8-1-2) и 8-2-1 (8-2-2) осуществляется от бортовой сети базовой машины.
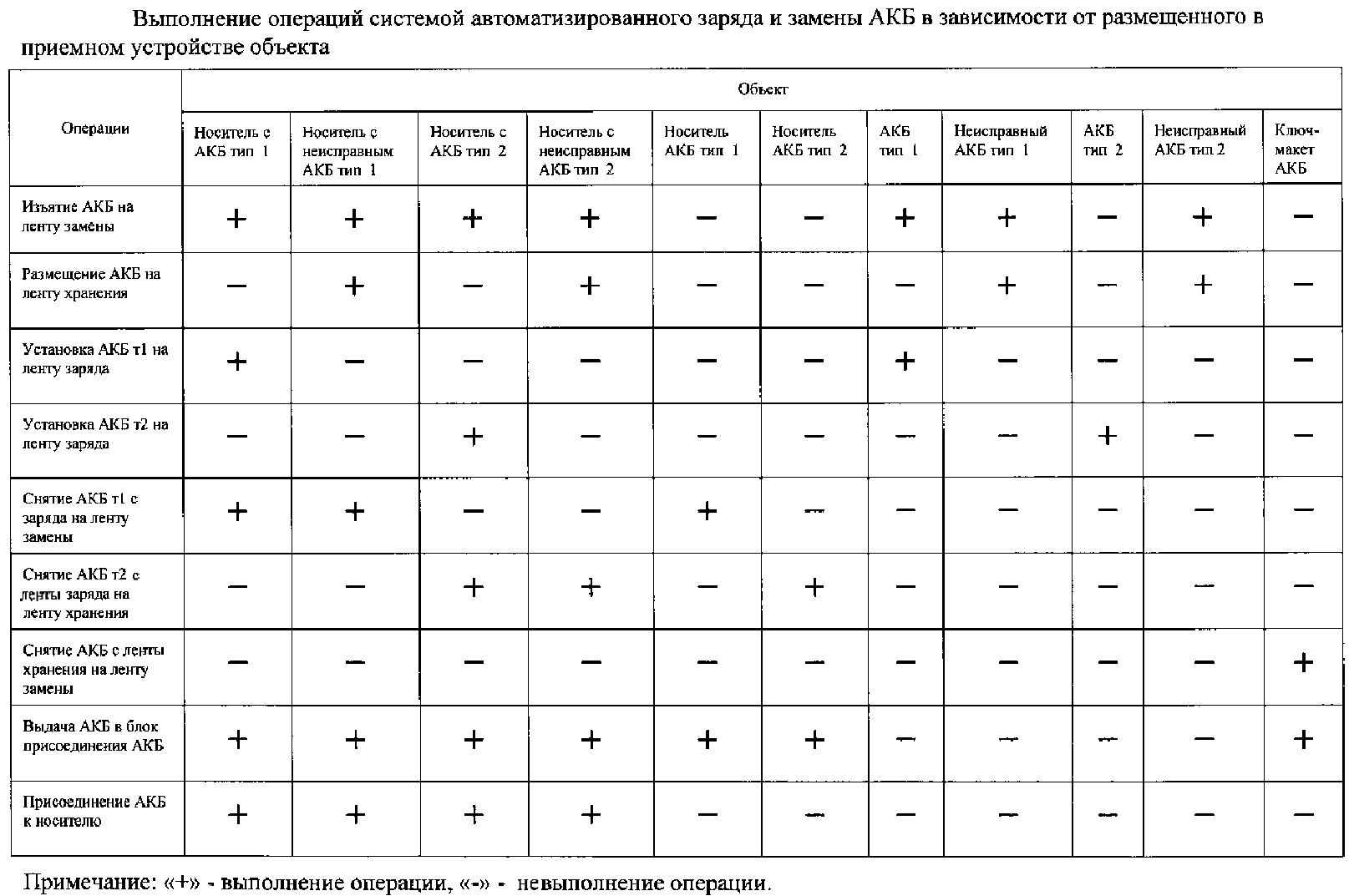
Способ реализуют следующим образом. После размещения объекта в блок присоединения микрокомпьютер через модуль датчиков идентифицирует объект и определяет режим работы системы автоматизированной замены и заряда аккумуляторных батарей, при котором выполняются или не выполняются следующие операции: изъятие аккумуляторной батареи на ленту замены, размещение аккумуляторной батареи на ленту крепления, установка аккумуляторной батареи на ленту крепления с токопроводом, снятие аккумуляторной батареи с ленты крепления с токопроводом на ленту замены, снятие аккумуляторной батареи с ленты крепления на ленту замены, выдача аккумуляторной батареи в блок присоединения, присоединение аккумуляторной батареи к носителю, обеспечивающие перемещение АКБ, за счет работы ленты крепления, ленты крепления с токопроводом, ленты замены и автоматов переключения лент. Заряд исправного изъятого из блока присоединения АКБ начинается, как только АКБ оказывается на ленте крепления с токопроводом. Оборот АКБ может обеспечиваться за счет произвольных последовательного приема и следующей за ним выдачи АКБ, но не более расчетного количества мест. Выполнение операций системой автоматизированного заряда и замены АКБ в зависимости от размещенного в приемном устройстве объекта представлено в таблице.
Работа системы замены и заряда аккумуляторных батарей
Базовая машина выдвигается в район выполнения задания персоналом, в силу специфики работы располагающегося рассредоточено и активно использующего средства связи и автоматизации, питание которых осуществляется от аккумуляторных батарей. Персонал по мере необходимости подходит к базовому шасси.
Режим 1. Объект-носитель с АКБ (тип 1)
Для замены аккумуляторных батарей носимое средство связи (автоматизации) устанавливается в блок присоединения. После размещения объекта в блок присоединения, микрокомпьютер через модуль датчиков идентифицирует объект и определяет режим работы системы автоматизированной замены и заряда аккумуляторных батарей. Далее происходит изъятие аккумуляторной батареи на ленту замены, установка аккумуляторной батареи (тип 1) на ленту крепления с токопроводом, снятие аккумуляторной батареи (тип 1) с ленты крепления с токопроводом на ленту замены, выдача аккумуляторной батареи в блок присоединения, присоединение аккумуляторной батареи к носителю.
Режим 2. Объект-носитель с неисправным АКБ (тип 1)
Для замены аккумуляторных батарей носимое средство связи (автоматизации) устанавливается в блок присоединения. После размещения объекта в блок присоединения микрокомпьютер через модуль датчиков идентифицирует объект и определяет режим работы системы автоматизированной замены и заряда аккумуляторных батарей. Далее происходят изъятие аккумуляторной батареи на ленту замены, размещение аккумуляторной батареи на ленту крепления, снятие аккумуляторной батареи (тип 1) с ленты крепления с токопроводом на ленту замены, выдача аккумуляторной батареи в блок присоединения, присоединение аккумуляторной батареи к носителю.
Режим 3. Объект-носитель с АКБ (тип 2). Аналогично режиму 1.
Режим 4. Объект-носитель с неисправным АКБ (тип 2). Аналогично режиму 2.
Режим 5. Объект-носитель, размещенный идентификационной стороной, использующий АКБ (тип 1).
После размещения объекта в блок присоединения микрокомпьютер через модуль датчиков идентифицирует объект и определяет режим работы системы автоматизированной замены и заряда аккумуляторных батарей. Далее происходит снятие аккумуляторной батареи (тип 1) с ленты крепления с токопроводом на ленту замены, выдача аккумуляторной батареи в блок присоединения.
Режим 6. Объект-носитель, размещенный идентификационной стороной, использующий АКБ (тип 2). Аналогично режиму 5.
Режим 7. Объект - АКБ (тип 1)
После размещения объекта в блок присоединения микрокомпьютер через модуль датчиков идентифицирует объект и определяет режим работы системы автоматизированной замены и заряда аккумуляторных батарей. Далее происходит изъятие аккумуляторной батареи на ленту замены и установка аккумуляторной батареи (тип 1) на ленту крепления с токопроводом.
Режим 8. Объект - неисправный АКБ (тип 1)
После размещения объекта в блок присоединения микрокомпьютер через модуль датчиков идентифицирует объект и определяет режим работы системы автоматизированной замены и заряда аккумуляторных батарей. Далее происходит изъятие аккумуляторной батареи на ленту замены и размещение аккумуляторной батареи на ленту крепления.
Режим 9. Объект - АКБ (тип 2). Аналогично режиму 7.
Режим 10. Объект - неисправный АКБ (тип 2). Аналогично режиму 8.
Режим 11. Объект - ключ (макет АКБ)
После размещения объекта в блок присоединения микрокомпьютер через модуль датчиков идентифицирует объект и определяет режим работы системы автоматизированной замены и заряда аккумуляторных батарей. Далее происходит снятие аккумуляторной батареи с ленты крепления на ленту замены и выдача аккумуляторной батареи в блок присоединения АКБ. При работе в режиме 1.
При установке в блок присоединения 15 объекта 20 (носитель с АКБ тип 1) происходит его идентификация и формируется управляющий воздействующий сигнал посредством модуля датчиков 18 и микрокомпьютера 19, замыкается выключатель 14, который замыкает цепь питания 7-1 и 7-2 с двигателем постоянного тока 12. После экстракции аккумуляторной батареи 9-1 из носителя с помощью приемного устройства 15 и автомата переключения лент 17 она устанавливается на ленту замены 16. Затем посредством автомата переключения лент 17 аккумуляторная батарея 9-1 подключается к ленте крепления 10-1 с токопроводом 13. Шины 13-1-1 и 13-2-1 получают питание от шин 8-1-1 и 8-2-1. Далее заряженная батарея 9-1 устанавливается на ленту замены 16 посредством автомата переключения лент 17 и подается в блок присоединения 15, который присоединяет аккумуляторную батарею 9-1 к носителю, после чего выключатель 14 размыкает цепь привода двигателя постоянного тока 12.
При работе в режиме 2.
При установке в блок присоединения 15 объекта (носитель с неисправным АКБ, тип 1) происходит его идентификация и формируется управляющий воздействующий сигнал посредством модуля датчиков 18 и микрокомпьютера 19, замыкается выключатель 14, который замыкает цепь питания 7-1 и 7-2 с двигателем постоянного тока 12. После экстракции аккумуляторной батареи 9-1 из носителя с помощью блока присоединения 15 и автомата переключения лент 17 она устанавливается на ленту замены 16. Затем посредством автомата переключения лент 17 аккумуляторная батарея 9-N закрепляется на ленте крепления 10-N. Далее заряженная батарея 9-1 с ленты крепления 10-1 с токопроводом 13, питающимся от шин 8-1-1 и 8-2-1, устанавливается на ленту замены 16 посредством автомата переключения лент 17 и подается в блок присоединения 15, который присоединяет аккумуляторную батарею 9-1 к носителю, после чего выключатель 14 размыкает цепь привода двигателя постоянного тока 12.
Работа в режиме 3 аналогична работе в режиме 1.
Работа в режиме 4 аналогична работе в режиме 2.
Работа в режиме 5
При установке в блок присоединения 15 объекта (носитель АКБ, тип 1) происходит его идентификация и формируется управляющий воздействующий сигнал посредством модуля датчиков 18 и микрокомпьютера 19, замыкается выключатель 14, который замыкает цепь питания 7-1 и 7-2 с двигателем постоянного тока 12. Заряженная батарея 9-1 устанавливается на ленту замены 16 посредством автомата переключения лент 17 и подается в блок присоединения 15, после чего выключатель 14 размыкает цепь привода двигателя постоянного тока 12.
Работа в режиме 6 аналогична работе в режиме 5.
Работа в режиме 7
При установке в блок присоединения 15 объекта (АКБ, тип 1) происходит его идентификация и формируется управляющий воздействующий сигнал посредством модуля датчиков 18 и микрокомпьютера 19, замыкается выключатель 14, который замыкает цепь питания 7-1 и 7-2 с двигателем постоянного тока 12. После экстракции аккумуляторной батареи 9-1 из носителя с помощью блока присоединения 15 и автомата переключения лент 17 она устанавливается на ленту замены 16. Затем посредством автомата переключения лент 17 аккумуляторная батарея 9-1 подключается к ленте крепления 10-1 с токопроводом 13. Шины 13-1-1 и 13-2-1 получают питание от шин 8-1-1 и 8-2-1. Выключатель 14 размыкает цепь привода двигателя постоянного тока 12.
Работа в режиме 8
При установке в блок присоединения АКБ 15 объекта (неисправный АКБ, тип 1), происходит его идентификация и формируется управляющий воздействующий сигнал посредством модуля датчиков 18 и микрокомпьютера 19, замыкается выключатель 14, который замыкает цепь питания 7-1 и 7-2 с двигателем постоянного тока 12. После экстракции аккумуляторной батареи 9-N из носителя с помощью блока присоединения 15 и автомата переключения лент 17 она устанавливается на ленту замены 16. Затем посредством автомата переключения лент 17 аккумуляторная батарея 9-N размещается на ленте крепления 10-N. После чего выключатель 14 размыкает цепь привода двигателя постоянного тока 12.
Работа в режиме 9 аналогична работе в режиме 7.
Работа в режиме 10 аналогична работе в режиме 8.
Работа в режиме 11
При установке в блок присоединения 15 объекта (ключ-макет аккумуляторной батареи) происходит его идентификация и формируется управляющий воздействующий сигнал посредством модуля датчиков 18 и микрокомпьютера 19, замыкается выключатель 14, который замыкает цепь питания 7-1 и 7-2 с двигателем постоянного тока 12. Аккумуляторная батарея 9-N с помощью автомата переключения лент 17 устанавливается на ленту замены 16 и подается в блок присоединения 15, после чего выключатель 14 размыкает цепь привода двигателя постоянного тока 12.
Разработанные способ и система замены и заряда АКБ обеспечивают необходимый уровень и время заряда аккумуляторных батарей в условиях отсутствия стационарной системы электроснабжения.
Колейное пролетное строение со складными щитами перекрытия межколейного промежутка

