Результат интеллектуальной деятельности: СПОСОБ БЕССТРОБОВОГО АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПОДВИЖНОЙ ЦЕЛИ
Вид РИД
Изобретение
Изобретение относится к гидроакустике и радиолокации и касается системы обработки информации в части автоматического сопровождения подвижной цели.
Возрастающий поток информации в условиях воздействия интенсивного нестационарного шума на входе гидроакустической или радиолокационной системы предъявляет все более высокие требования к надежности обработки информации. В этих условиях только автоматическое сопровождение целей позволяет справиться с возросшим потоком информации, однако надежность автоматического сопровождения при воздействии шумов по-прежнему остается невысокой.
Как известно, процесс автоматического сопровождения подвижной цели предполагает обнаружение сигнала в приемном тракте ГАС или РЛС и принятие решения об обнаружении отметки цели (истинной или ложной), которой соответствуют некоторые измеренные значения координат, например дальность Di и пеленг Pi [1, 2]. В некоторых системах дополнительно измеряют радиальную скорость цели, учитываемую в процессе сопровождения.
Воздействие нестационарного интенсивного шума приводит к появлению на выходе обнаружителя ложных отметок, вероятность появления которых непрерывно меняется.
Каждую обнаруженную в текущем цикле обработки отметку проверяют на принадлежность уже сопровождаемым траекториям по отклонению ее координат от предполагаемых (экстраполируемых) значений. Если эти отклонения по всем сопровождаемым траекториям превышают допустимый порог, отметку считают вновь обнаруженной («первичной»).
Вокруг каждой вновь обнаруженной отметки, например, с координатами D1 и P1 (i=l), на второй цикл обработки (i=2) формируют строб первичного захвата («автозахвата»), положение которого по дальности Dstr11…Dstr22 и пеленгу Pstr12…Pstr22 выбирают исходя из максимально возможной скорости движения цели (Vmax), длительности цикла обработки (Т) и измерительных ошибок по дальности и пеленгу (sigD и sigP):
Если на втором цикле обработки (i=2) в пределах данного строба обнаруживают отметку, то принимают решение об обнаружении траектории. Если отметка цели не была обнаружена на втором цикле обработки, принимают решение о прекращении процедуры обнаружения траектории или ее продолжении на следующий цикл (i=3) с соответствующим увеличением строба «автозахвата»:
Если в пределах строба «автозахвата» обнаруживают несколько отметок, то выбирают отметку, ближайшую к центру строба. Как правило полагают траекторию цели обнаруженной при обнаружении не менее двух отметок в пределах строба «автозахвата» в трех смежных циклах обработки.
После принятия решения об обнаружении траектории, когда имеет место обнаружение не менее двух отметок цели в смежных циклах обработки и можно уже определить направление и скорость изменения положения цели в принятой системе координат, возможно прогнозирование положения цели на последующие циклы обработки (экстраполяция).
По данным экстраполяции на каждом последующем цикле обработки строят строб «сопровождения», положение и размеры которого Xstr1i, Xstr2i по каждой из сопровождаемых координат xi (Di, Pi) определяют в соответствии с прогнозируемым положением цели по этой координате Xei (Dei, Pei), предполагаемыми ошибками экстраполяции и измерительными ошибками:
где sigXei (sigDi, sigPi) - предполагаемые ошибки экстраполяции (СКО),
sigX (sigD, sigP) - измерительные ошибки (СКО).
Для i≥3 экстраполируемые координаты определяют соответственно выбранной модели движения цели. Если положить, что цель движется с постоянными скоростью и курсом, то
где Xsi-1 и Vxsi-1 - оценка на i-1 цикл обработки (сглаженная) координата и скорость ее изменения, которые определяют соответственно выбранному алгоритму оценки траекторных данных (фильтру сглаживания).
Рассмотрим фильтр сглаживания, основанный на методе «средневзвешенных» [1], который совпадает с фильтром сглаживания, основанным на критерии минимизации среднеквадратического отклонения или наименьших квадратов [3]. В этом случае оценку координаты сопровождаемой цели Xsi вычисляют по результатам ее измерений хi, используя известные выражения:
Известно, что ошибки экстраполяции sigXei всегда превышают ошибки сглаживания sigXsi, т.е. sigXei>sigXsi [1]. Выполненные нами исследования показали, что такое превышение после 5 циклов обработки составляет 30-50%.
Сброс траектории цели с сопровождения обычно выполняют при отсутствии обнаруженных отметок в трех и более смежных циклах локации.
Недостатком такого способа сопровождения является то, что присутствие ложных отметок может привести к ситуации, когда ложная отметка оказывается ближе к центру строба (экстраполируемому положению цели). Такая ложная отметка, согласно выбранному критерию, будет отобрана для оценки координаты цели в текущем цикле обработки, что приведет к искаженной оценке координаты в процессе сопровождения, а в итоге - к снижению точности и надежности автоматического сопровождения цели. Если истинная отметка цели не была обнаружена в текущем цикле обработки, ложная отметка, попавшая в строб, будет отобрана для оценки координаты цели, что также приведет к искаженной оценке координаты.
Как показали результаты статистического моделирования, увеличение вероятности обнаружения ложных отметок при таком способе сопровождения приводит к снижению средней длины сопровождаемой траектории и вероятности автоматического захвата траектории цели на сопровождение.
Если сброс траектории с сопровождения выполняют при появлении 3 пропусков отметок в смежных циклах обработки, то для рассмотренного способа сопровождения ложные траектории длинной 4-5 циклов формируются с вероятностями 0.002, если вероятность появления ложной отметки pni=0.01, и 0.09, если pni=0.1. При критерии сброса 5 пропусков в смежных циклах обработки протяженность ложных траекторий возрастает на 2-3 цикла.
Широкое применение также находит способ сопровождения (прототип), когда решение об обнаружении траектории принимают, используя последовательный критерий принятия решения [2].
Согласно такому способу сопровождения каждой предполагаемой траектории присваивают некоторый условный вес Wi (накапливаемый от цикла к циклу логарифм отношения правдоподобия), который сравнивают с двумя порогами Н1 и H2, определяемыми заданными вероятностями правильного обнаружения траектории Pobn и ложной тревоги Flt:
Решение об обнаружении траектории принимают, если выполняется условие: Wi>H2, если Wi<H1, то принимают решение об отсутствии траектории и если H1≤Wi≤H2, испытания продолжают.
При этом условный вес Wi равен:

где Xi=1 в случае обнаружения отметки цели и Xi=0 - при пропуске отметки.


где pci - вероятность обнаружения отметки цели на i-м цикле испытаний.
Обычно полагают, что вероятности pci и pni в процессе сопровождения не меняются. Постоянства pni в условиях воздействия нестационарного шума достигают регулировкой порога обнаружения.
Как следует из представленных выражений, отрицательное приращение условного веса предполагаемой траектории dwi- определяется только вероятностью обнаружения одиночной отметки цели pci, и, как показывают расчеты, оно близко к единице. При этом положительное приращение dwi+ определяется соотношением между вероятностью обнаружения одиночной отметки цели pci и вероятностью обнаружения ложной отметки pni и может превышать единицу в несколько раз. Например, с увеличением pni от 0.001 до 0.01 dwi+ уменьшается с 2.7 до 1.7, если pci=0.5. При этом увеличение pci до 0.9 ведет к увеличению приращения dwi+ всего на 10%.
Отсюда следует вывод, что обнаружение каждой отметки ведет к увеличению условного веса предполагаемой траектории Wi на несколько единиц, тогда как пропуск отметки приводит к снижению условного веса на существенно меньшую величину. Следовательно, увеличение условного веса при обнаружении отметок цели в процессе ее автоматического сопровождения идет более высокими темпами, чем снижение в отсутствие отметок цели. Последнее означает возможность существенного роста числа ложных траекторий и длительности их сопровождения. Кроме того, не имеет смысла длительное сопровождение отсутствующей цели, обусловленное большим накопленным в процессе сопровождения условным весом траектории.
При таком способе сопровождения также выполняют описанное выше стробирование траекторных данных обнаруженных отметок цели.
Результаты статистического моделирования показали, что даже при относительно слабом сигнале средняя протяженность сопровождаемой траектории в случае применения второго способа оказывается в 1.5-2 раза больше, чем в случае применения первого способа. Причем среднее число контактов с целью до принятия решения об обнаружении траектории цели с ростом уровня эхо-сигнала при последовательном способе сопровождения уменьшается и достигает 3-4 контактов, если pci>0.9.
Результаты статистического моделирования также показали, что при малом значении вероятности появления ложных отметок (pni=0.001) формирование ложных траекторий при втором способе сопровождения происходит с существенно меньшей вероятностью, чем в случае применения первого способа. Однако реальный, превышающий расчетный, уровень шума может приводить к формированию ложных траекторий с достаточно высокой вероятностью. Например, ложные траектории до 5 циклов формируются с вероятностью 0.07 при заданной вероятности появления ложных отметок pno=0.001, если фактическая вероятность появления ложных отметок pni=0.01. Если же pni=0.1, то с вероятностью 0.07 возможно формирование ложных траекторий протяженностью до 18 циклов локации.
Следует отметить, что последовательный способ сопровождения накладывает достаточно жесткие ограничения на поддержание порога обнаружения по сравнению с первым способом.
Целью настоящего изобретения является снижение вероятности формирования ложных траекторий.
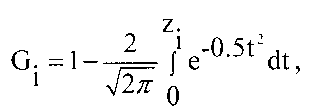
Поставленная цель в предлагаемом способе бесстробового автоматического сопровождения подвижной цели, основанном на последовательном критерии принятия решения о сопровождении (обнаружении траектории) и отказе от сопровождения, достигается благодаря дополнительной оценке разности между измеренным значением координаты обнаруженной отметки цели хi и ее экстраполируемым на текущий цикл обработки для данной траектории значением Xei-ΔΧi=xi-Xei и соответствующему изменению положительного приращения dwi+, путем его увеличения в Gi раз согласно выражению:

где коэффициент Gi определяется в предположении о нормальном распределении измеренных и экстраполируемых значений координаты выражением:

где 

Согласно предлагаемому способу на каждом цикле обработки (локации) после обнаружения любой отметки и измерения ее координат определяют разность ΔΧi и, используя выражение (13), положительное приращение dwi+ для всех хранимых в памяти вычислительной системы траекторий. Значения приращения dwi+ менее некоторого наперед заданного числа, например 0.01, приравнивают 0, и соответствующие им траектории по отношению к этой отметке на текущем цикле обработки не рассматривают, что позволяет сократить время обработки информации. Отметку присоединяют к той траектории, для которой положительное приращение имеет наибольшее значение.
Если к одной и той же траектории могут быть присоединены несколько отметок, отбирают ту отметку, для которой положительное приращение имеет наибольшее значение. Поэтому в памяти системы обработки следует хранить не только измеренные координаты обнаруженных отметок, номер отобранной траектории, но и величину положительного приращения. Такой отбор также позволяет снизить вероятность перепутывания траекторий при сопровождении в случае их близкого взаимного расположения.
Если отобранная траектория считалась необнаруженной и ее условный вес на данный цикл обработки был ниже значения верхнего порога Н2, то его увеличивают на величину положительного приращения dwi+, сравнивают с верхним порогом, и, если порог превышен, то траектория далее считается обнаруженной. Если верхний порог не превышен, траектория считается необнаруженной, но ее данные хранят в памяти системы.
Для снижения времени принятия решения о сбросе траектории с сопровождения после принятия решения об обнаружении траектории цели предлагаем:
- ограничить максимальную величину условного веса сопровождаемой траектории, например, значением Н2′=Н2+dwi+;
- повысить абсолютное значение отрицательного приращения dwi-, например, до величины dw1, определяемой выбранным критерием сброса траектории с сопровождения:

где m=3-5 пропусков отметок в смежных циклах обработки.
Если отобранная траектория ранее считалась обнаруженной, условный вес траектории не изменяют и траектория остается на сопровождении.
Для всех траекторий, находящихся на этапах обнаружения или сопровождения, данные которых хранят в памяти системы и к которым на текущем цикле обработки не были присоединены обнаруженные отметки, условный вес уменьшают на величину отрицательного приращения dw1, вычисляемого согласно выражению (17). Полученные таким образом значения условных весов сравнивают с нижним порогом H1. Если условный вес какой-то траектории оказывается ниже значения нижнего порога, она сбрасывается с сопровождения, и ее данные могут быть стерты из памяти системы обработки.
Далее измеренные координаты каждой обнаруженной отметки подвергают процедуре сглаживания (оценке) согласно выбранному фильтру сглаживания и экстраполяции соответственно выбранной модели движения цели, как и в прототипе.
Как показали результаты статистического моделирования, при таком способе сопровождения вероятность формирования ложных траекторий существенно снижается по сравнению с прототипом, несколько проигрывая ему по протяженности сопровождаемой траектории. Так, даже при относительно высокой вероятности появления ложных отметок (pni=0.01-0.1) вероятность формирования ложных траекторий оказывается не более 0.001. Если же расчетный уровень шума ориентирован на pno=0.001, а фактическая вероятность появления ложных отметок pni=0.1 или 0.01, то для предлагаемого способа сопровождения возможно формирование ложных траекторий протяженностью до 5-9 циклов обработки с вероятностью, не превышающей 0.001 и 0.0001 соответственно, что на порядок ниже, чем для прототипа.
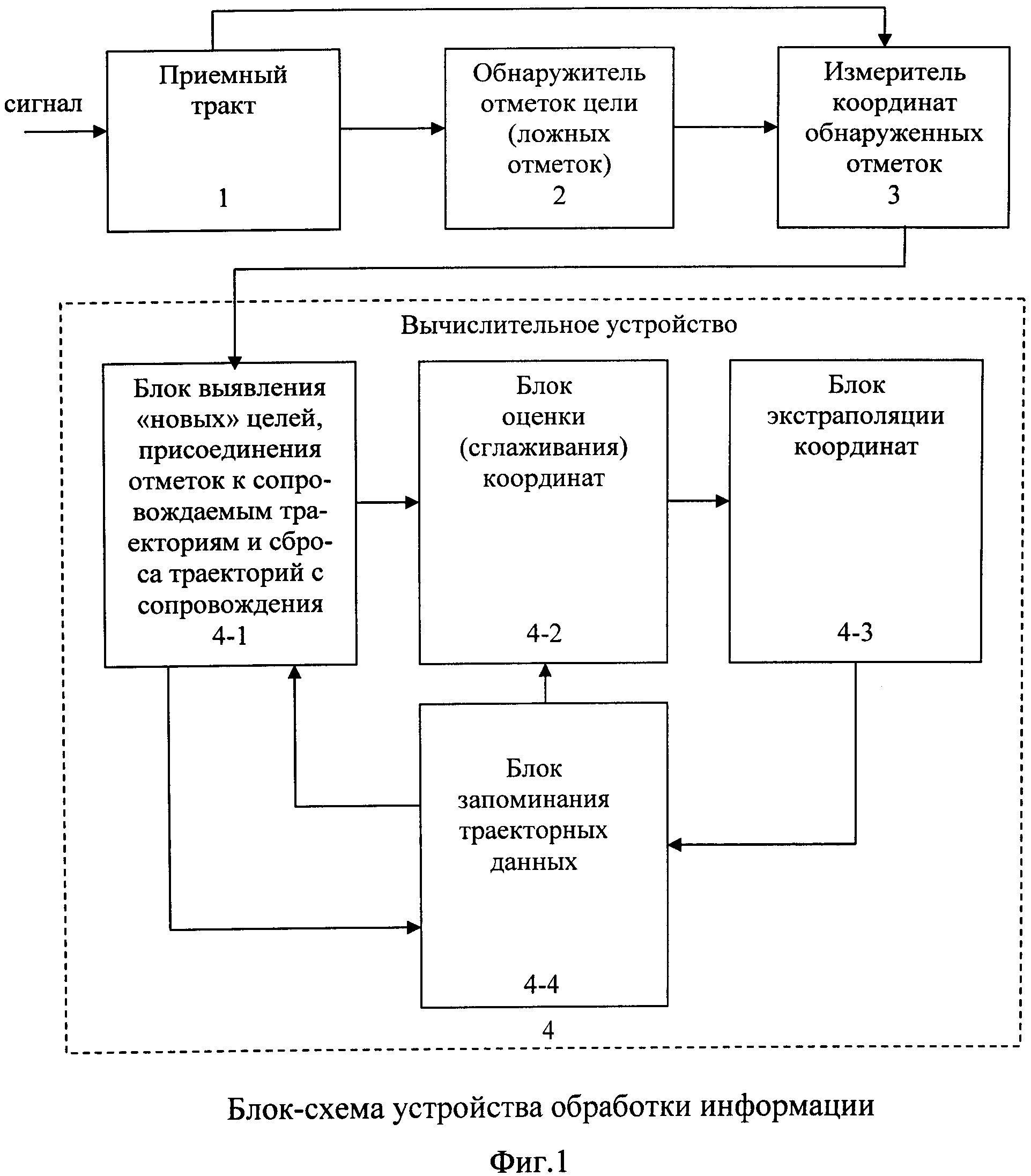
Предлагаемый способ может быть реализован в устройстве обработки информации, блок-схема которого представлена на фиг. 1, состоящем из последовательно соединенных приемного тракта 1, обнаружителя отметок цели (ложных отметок) 2, измерителя координат обнаруженных отметок 3 и вычислительного устройства 4. Приемный тракт 1 вторым выходом соединен со вторым входом измерителя координат 3.
Вычислительное устройство 4 состоит из последовательно соединенных блока выявления «новых» целей, присоединения отметок к сопровождаемым траекториям и сброса траекторий с сопровождения 4-1, блока оценки (сглаживания) координат 4-2, блока экстраполяции координат 4-3 и блока запоминания траекторных данных 4-4. Входом вычислительной системы 4 является первый вход блока выявления 4-1. Блок запоминания 4-4 также соединен вторым входом со вторым выходом блока 4-1, а его первый и второй выходы соединены со вторыми входами блоков 4-1 и 4-2. В качестве вычислительной системы может быть использован типовой персональный компьютер.
Принимаемый антенной сигнал поступает на вход приемного тракта 1 и далее на обнаружитель 2, где его сравнивают с порогом обнаружения. В случае превышения сигналом порога поступает команда на измеритель 3, в котором определяют соответствующие обнаруженному сигналу значения координат. Так получают отметку цели либо ложную отметку и измеренные значения ее координат, которые поступают в вычислительную систему 4.
В вычислительной системе 4 в блоке 4-1 согласно предлагаемому способу вычисляют положительные приращения для всех хранимых в блоке запоминания 4-4 траекторий и присоединяют обнаруженную отметку к траектории, для которой это приращение имеет наибольшее значение. Если отметку не присоединяют ни к одной из запоминаемых траекторий, она считается «новой» и ее данные поступают в блок запоминания 4-4. В этом же блоке снижается условный вес траекторий, и принимается решение о прекращении сопровождения траекторий, отметки которых не были обнаружены в текущем цикле обработки.
В блоке 4-2 выполняют сглаживание координат обнаруженной отметки с учетом данных отобранной траектории.
В блоке 4-3 определяют экстраполируемые на следующий цикл обработки значения координат, которые запоминают в блоке 4-4.
Источники информации
1. С.З. Кузьмин. Цифровая обработка радиолокационной информации. М.: Сов. радио, 1967.
2. С.З. Кузьмин. Основы теории цифровой обработки радиолокационной информации. М: Сов. радио, 1974.
3. Least squares algorithms for constant-acceleration target tracking. Dagancay Kutluyil, Proceedinos of the International Conference on Radar, Adelaide, 3-5 Sept., 2003. Piscataway (N.J.); IEEE. 2003. p.566-571.


Генератор паров щелочного металла
Сверхзвуковой летательный аппарат и способ реализации его полета
Акустооптический приемник
Способ регистрации подводных объектов
Пироклапан
Мобильная пусковая установка
Устройство для снятия с мели
Способ наведения самоходной плавающей десантной техники на десантно-доступные районы побережья
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания летательных аппаратов
Установка для исследования электроёмкости проводников на модели из электропроводящей бумаги
Датчик для исследования потоков метеороидных и техногенных частиц в космическом пространстве
Генератор паров щелочного металла
Сверхзвуковой летательный аппарат и способ реализации его полета
Акустооптический приемник
Способ регистрации подводных объектов
Пироклапан
Мобильная пусковая установка
Устройство для снятия с мели
Способ наведения самоходной плавающей десантной техники на десантно-доступные районы побережья
Способ эксплуатации никель-водородных аккумуляторных батарей системы электропитания летательных аппаратов

