Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области геофизики, в частности к способам и устройствам определения ускорения силы тяжести (УСТ) на движущемся объекте, и может быть использовано для выполнения морской гравиметрической съемки в море, преимущественно на маломерных объектах.
Известны способы и устройства для определения УСТ на движущемся объекте, включающие измерения УСТ гравиметром, неподвижно установленным на объекте-носителе, определение широты места, пути и абсолютной скорости объекта навигационным средством, вычисление по полученным данным поправки на эффект Этвеша (патенты RU №1760875 С, 27.03.1995 [1], RU №2144686 С1, 20.01.2000 [2], RU №2128851 С1, 10.04.1999 [3], RU №2150132 С1, 27.05.2000 [4], RU №4015 U1, 16.04.1997 [5], US №3803916 А, 16.04.1974 [6], US №4550601 А, 05.11.1985 [7], ЕР №0295297 А1, 21.12.1988 [8], RU №2016383 С1, 15.07.1994 [9], Юзефович А.П., Огородова Л.В. Гравиметрия. - М., 1980, с.160-164 [10].
При этом устройства для осуществления известных способов содержат функционально соединенные и расположенные на стабилизированной в горизонте платформе чувствительную систему, блок управления, навигационное средство, вычислитель и регистратор.
Недостатки известных способов и устройств заключаются в том, что они имеют недостаточно высокую точность определения УСТ на движущемся объекте при выполнении морской гравиметрической съемки. Это объясняется тем, что при их использовании имеют место существенная погрешность определения поправки на эффект Этвеша и существенная погрешность определения УСТ на движущемся объекте, обусловленная искажением гравитационного поля, которое возникает за счет значительной (от 3 до 6 мин) постоянной времени низкочастотного фильтра гравиметра, и скоростью изменения гравитационного поля, в котором движется объект. Погрешность возникает при использовании известных способов и устройства из-за того, что поправку на эффект Этвеша вычисляют по формуле [10]:

если Земля представлена в виде шара, или по формуле:

если Земля представляется в виде эллипсоида, где в формулах (1) и (2)
φ - широта места объекта,
α - путевой угол объекта,
R - радиус Земли,
a, e - большая полуось и эксцентриситет земного эллипсоида,
ω - угловая скорость вращения Земли,
Vн - абсолютная скорость движения объекта-носителя гравиметра (абсолютная скорость движения чувствительной системы гравиметра);
VN, VE - соответственно северная и восточная составляющие Vн.
При определении УСТ в море на движущемся объекте траектория чувствительной системы гравиметра ρ, как правило (в большинстве случаев), не совпадает с поверхностью моря или земного эллипсоида, так как поверхность моря или океана изменяется как во времени, так и в пространстве под воздействием тектонических, гидрометеорологических и других факторов.
В результате этого радиус кривизны траектории движения гравиметра может принимать значения от А до ∞ и от -∞ до - А, а угол β между вектором абсолютной скорости гравиметра и плоскостью горизонта может принимать значения от 0 до β.
Погрешность поправки Этвеша МΔgβ из-за неучета угла β можно вычислить по формуле:

Например, когда β=5° и Δgэт=100 мГл, то погрешность МΔβg может достигать 8,7 мГл.
Погрешность поправки Этвеша МΔgρ, обусловленную использованием в формулах (1) и (2) вместо радиуса кривизны траектории движения объекта (радиуса Земли или большой полуоси и эксцентриситета земного эллипсоида), оценивают по формуле:

Например, когда Vн=9 м/с, ρ=106 м при R=6378155 м погрешность MΔqρ составляет 6,8 мГл. При этом необходимо учесть, что принятое для расчета погрешности значение ρ не является экстремальным для существующей динамики объекта носителя, движущегося по морской поверхности или удерживающего постоянную глубину погружения при съемке.
Так преобладающий период колебаний подводного объекта составляет 30-120 с, а амплитуда вертикальных перемещений 2…3 м (Попов Е.И. Определение силы тяжести на подвижном основании. М.: Наука, 1967, с.178).
Отсюда следует, что значение ρ может достигать 3 км, что не учитывается в настоящее время при вычислении поправки Этвеша.
Погрешность MΔgпв искажения гравиметрического поля, обусловленную наличием постоянной времени гравиметра и скорости движения носителя, можно оценить следующим образом. Известно (Аппаратура и методы экспериментальных исследований по гравиметрии. М.: Наука, 1965, с.103), что погрешность MΔgпв растет с увеличением постоянной времени гравиметра и скорости изменения гравитационного поля, в котором движется объект - носитель гравиметра, и ее можно вычислить по формуле

где Vg - скорость изменения гравитационного поля, в котором движется объект-носитель гравиметра,
Vн - абсолютная скорость объекта-носителя гравиметра,
Т - постоянная времени низкочастотного фильтра гравиметра.
Например, когда Vg=0,8 мГл (средняя скорость изменения в средних широтах по меридиану УСТ (см. там же), Vн=9,25 м/с (допустимая скорость движения объекта-носителя аппаратуры при проведении гравиметрической съемки в океане (Единые технические требования по Мировой гравиметрической съемке. Часть IV. Инструкция по морской гравиметрической съемке (ИГ-78). Л.: изд. ГУНиО МО СССР, 1979, с.6, 7), Т=3 мин или Т=6 мин - значения постоянной времени у современных гравиметров [10], то погрешность МΔgпв составит 1,3 мГл или 2,6 мГл соответственно.
Однако допустимая погрешность определения УСТ в океане в соответствии с действующими нормативными документами по гравиметрической съемке (Единые технические требования по Мировой гравиметрической съемке. Часть IV. Инструкция по морской гравиметрической съемке (ИГ-78). Л.: изд. ГУНиОМО СССР, 1979, с.6, 7) не должна превышать 1 мГл. Кроме того, для определения абсолютного значения УСТ необходимо использование опорных гравиметрических пунктов (ОГП), что значительно уменьшает эффективность съемки в связи с необходимостью периодического перемещения объекта-носителя в район ОГП.
В известном способе определения силы тяжести на морском опорном пункте [1], включающем измерения силы тяжести морскими набортными гравиметрами на опорном пункте при прохождении его судном, движущимся последовательно по нескольким прямолинейным галсам, проложенным через опорный пункт, в котором для повышения точности определения силы тяжести измерения производят гравиметрами на прямых и обратных курсах по n - парам галсов с углом смещения 40-50 градусов в пределах опорной зоны с радиусом R+mоп/2G, где mоп - погрешность значения силы тяжести на опорном пункте, G - градиент силы тяжести в пределах опорной зоны, вычисляют опорное значение силы тяжести для гравиметров как среднеарифметическое из значений по n - парным прохождениям в точках, максимально приближенных к опорному пункту. Ввиду того что измерения производят двумя противоположными ориентированными гравиметрами, а опорное значение силы тяжести и осредненный нуль-пункт вычисляют для каждой пары приборов, можно повысить точность определения силы тяжести. Однако технический результат достигается только в пределах рабочей зоны в точках, максимально приближенных к опорному пункту.
В известном способе определения ускорения силы тяжести на движущемся объекте и устройстве для его осуществления (патент RU №2324207 С1, 10.05.2008 [11]) техническим результатом является повышение точности определения УСТ на движущемся объекте и повышение эффективности съемки за счет определения абсолютного значения УСТ без использования ОГП, в отличие от известного способа [1], что достигается тем, что в способе определения УСТ на движущемся объекте, включающем измерение ускорения  неподвижным относительно объекта гравиметром (акселерометром по вертикали), определение широты места φ, путевого угла α, абсолютной скорости Vн чувствительной системы гравиметра навигационным средством и вычисление по полученным данным искомого абсолютного значения УСТ (g0), дополнительно определяют угол β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, радиус кривизны ρ траектории движения чувствительной системы, а искомое абсолютное значение УСТ вычисляют по формуле:
неподвижным относительно объекта гравиметром (акселерометром по вертикали), определение широты места φ, путевого угла α, абсолютной скорости Vн чувствительной системы гравиметра навигационным средством и вычисление по полученным данным искомого абсолютного значения УСТ (g0), дополнительно определяют угол β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, радиус кривизны ρ траектории движения чувствительной системы, а искомое абсолютное значение УСТ вычисляют по формуле:

где ω - угловая скорость вращения Земли,
дополнительно измеряют вертикальную Vzi и горизонтальные составляющие Vxi, Vyi вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti и t(i+1) в точках траектории движения чувствительной системы, а значения β и ρ вычисляют по формулам:


а устройство, содержащее функционально соединенные и расположенные на стабилизированной в плоскости горизонта платформе чувствительную систему гравиметра, блок управления, навигационное средство, вычислитель и регистратор, дополнительно снабжено блоком для определения угла β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, а также радиуса кривизны ρ траектории движения чувствительной системы гравиметра, вход которого соединен с выходом блока управления и подключен к выходу навигационного средства, а выход подключен к входу вычислителя, реализующего формульную зависимость (6), а блок для определения β и ρ содержит трехкомпонентный измеритель абсолютной скорости чувствительной системы гравиметра, реализующей формульные зависимости:


при этом выходы трехкомпонентного измерителя абсолютной скорости чувствительной системы и измерителя времени подключены к входу вычислителя.
Недостатком известного способа и устройства для его осуществления [11] является то, что при их использовании необходимо измерять вертикальные и горизонтальные составляющие вектора абсолютной скорости в точках траектории движения чувствительной системы гравиметра, что является сложной проблемой, поскольку у существующих измерителей абсолютной скорости движения объекта чувствительная система (антенна) расположена в днище подвижного объекта и не совпадает с местом расположения чувствительной системы гравиметра. Данное обстоятельство обуславливает существенную погрешность измерения вертикальной и горизонтальной составляющих вектора абсолютной скорости движения чувствительной системы гравиметра из-за того, что траектория перемещения системы отличается от траектории перемещения антенны измерителя абсолютной скорости движения объекта, особенно при наличии волнения и рыскания объекта.
Известен также способ определения ускорения силы тяжести на движущемся объекте и устройство для его осуществления (патент RU №2479859, 20.04.2013 [12]), который включает измерение ускорения  неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности), определение широты места φ, путевого угла α, абсолютной скорости Vн движения объекта навигационным средством определения угла β между вектором абсолютной скорости Vн движения объекта и плоскостью горизонта, радиуса кривизны ρ траектории движения чувствительной системы гравиметра, а искомое абсолютное значение ускорения силы тяжести go определяют путем вычисления по формуле:
неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности), определение широты места φ, путевого угла α, абсолютной скорости Vн движения объекта навигационным средством определения угла β между вектором абсолютной скорости Vн движения объекта и плоскостью горизонта, радиуса кривизны ρ траектории движения чувствительной системы гравиметра, а искомое абсолютное значение ускорения силы тяжести go определяют путем вычисления по формуле:

где ω - угловая скорость вращения Земли,
измеряют ускорения  и
и  соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при их движении на объекте навстречу друг другу в горизонтальной плоскости по направлению пути движения объекта в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом измеряют линейную скорость Vr акселерометров относительно движущегося объекта, а значения β и ρ определяют путем вычисления по формулам:
соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при их движении на объекте навстречу друг другу в горизонтальной плоскости по направлению пути движения объекта в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом измеряют линейную скорость Vr акселерометров относительно движущегося объекта, а значения β и ρ определяют путем вычисления по формулам:


а в устройстве для осуществления способа, содержащем чувствительную систему гравиметра, расположенную на косвенно стабилизированной в плоскости горизонта платформе, блок управления, навигационное средство, вычислитель и регистратор, блок определения угла β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, а также радиуса кривизны ρ траектории движения чувствительной системы гравиметра, при этом выходы чувствительной системы гравиметра и навигационного средства подвижного объекта соединены через блок управления с выходом блока определения значений β и ρ, выход которого соединен с входом вычислителя, реализующего зависимость:

выход которого соединен с входом регистратора, блок определения значений β и ρ расположен на косвенно стабилизированной в плоскости горизонта и в направлении пути объекта платформе и снабжен первым и вторым акселерометрами с вертикальными осями чувствительности, механизмом движения чувствительных элементов данных акселерометров в плоскости горизонта навстречу друг другу по направлению пути движения объекта, измерителем линейной скорости движения чувствительных элементов первого и второго акселерометров относительно объекта, регистратором моментов встречи чувствительных элементов на траверзе с чувствительной системой гравиметра и вычислителем.
Способ определения ускорения силы тяжести на движущемся объекте и устройство для его осуществления [12] выгодно отличаются по сравнению с известным способом и устройством для его осуществления [11]. Однако существенным недостатком известных технических решений [11 и 12] является то, что навигационное средство выполнено в виде инерциальной навигационной системы, что ограничивает применение известных способов и устройств для их осуществления только крупнотоннажными объектами. В то же время имеется ряд задач, решаемых малогабаритными подвижными объектами как надводными, так и подводными объектами в обеспечение мониторинга объектов хозяйственной деятельности, размещенных на морских акваториях.
Задачей предлагаемого технического решения является расширение функциональных возможностей способа определения ускорения силы тяжести на движущемся объекте и устройства для его осуществления, а также снижение массогабаритных характеристик и материальных затрат при определении ускорения силы тяжести на движущемся объекте.
Поставленная задача решается за счет того, что в способе определения ускорения силы тяжести на движущемся объекте, включающем измерение ускорения  неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности), определение широты места φ, путевого угла α, абсолютной скорости Vн движения объекта навигационным средством определения угла β между вектором абсолютной скорости Vн движения объекта и плоскостью горизонта, радиуса кривизны ρ траектории движения чувствительной системы гравиметра, а искомое абсолютное значение ускорения силы тяжести g0 определяют путем вычисления по формуле:
неподвижным относительно объекта гравиметром (акселерометром с вертикальной осью чувствительности), определение широты места φ, путевого угла α, абсолютной скорости Vн движения объекта навигационным средством определения угла β между вектором абсолютной скорости Vн движения объекта и плоскостью горизонта, радиуса кривизны ρ траектории движения чувствительной системы гравиметра, а искомое абсолютное значение ускорения силы тяжести g0 определяют путем вычисления по формуле:

где ω - угловая скорость вращения Земли,
измеряют ускорения  и
и  соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при их движении на объекте навстречу друг другу в горизонтальной плоскости по направлению пути движения объекта в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом измеряют линейную скорость Vr акселерометров относительно движущегося объекта, а значения β и ρ определяют путем вычисления по формулам:
соответственно первым и вторым акселерометрами с вертикальной осью чувствительности при их движении на объекте навстречу друг другу в горизонтальной плоскости по направлению пути движения объекта в моменты встречи их на траверзе с чувствительной системой гравиметра, при этом измеряют линейную скорость Vr акселерометров относительно движущегося объекта, а значения β и ρ определяют путем вычисления по формулам:


в отличие от прототипа [12] абсолютную скорость движения объекта измеряют посредством гидроакустического измерителя скорости, при этом выполняют компенсацию дестабилизирующих факторов, обусловленных влиянием углов качек и вертикальной составляющей скорости подвижного объекта, определение широты места подвижного объекта выполняют посредством приемника спутниковой радионавигационной системы, антенна которого размещена на буйрепе подводного подвижного объекта, а в устройстве для осуществления способа, содержащем чувствительную систему гравиметра, расположенную на косвенно стабилизированной в плоскости горизонта платформе, блок управления, навигационное средство, вычислитель и регистратор, блок определения угла β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, а также радиуса кривизны (траектории движения чувствительной системы гравиметра, при этом выходы чувствительной системы гравиметра и навигационного средства подвижного объекта соединены через блок управления с выходом блока определения значений β и ρ, выход которого соединен с входом вычислителя, реализующего зависимость

выход которого соединен с входом регистратора, блок определения значений β и ρ расположен на косвенно стабилизированной в плоскости горизонта и в направлении пути объекта платформе и снабжен первым и вторым акселерометрами с вертикальными осями чувствительности, механизмом движения чувствительных элементов данных акселерометров в плоскости горизонта навстречу друг другу по направлению пути движения объекта, измерителем линейной скорости движения чувствительных элементов первого и второго акселерометров относительно объекта, регистратором моментов встречи чувствительных элементов на траверзе с чувствительной системой гравиметра и вычислителем, навигационное средство выполнено в виде гидроакустического измерителя скорости, приемника спутниковой радионавигационной системы, антенна которого размещена на буйрепе подводного подвижного объекта и датчиков линейных и угловых перемещений подвижного объекта.
Сущность заявляемого технического решения поясняется чертежами (фиг.1, 2, 3, 4).
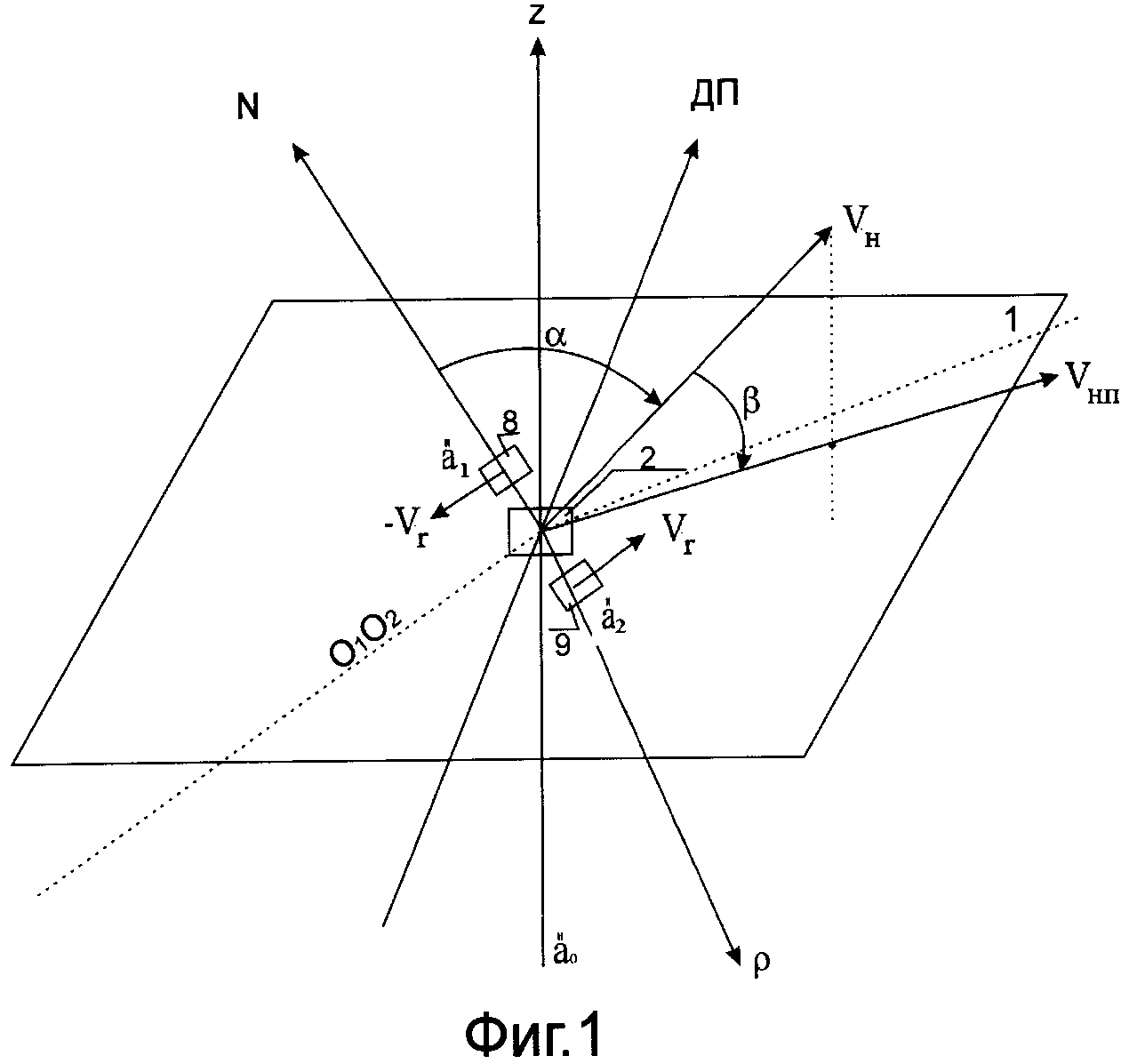
Фиг.1. Схема реализации способа. Позициями обозначены: платформа 1, гравиметр 2, N - направление на север, Z - вертикальная ось, ДП - диаметральная плоскость объекта, Vн - абсолютная скорость объекта-носителя гравиметра 2, Vнп - скорость движения объекта в моменты встречи чувствительных элементов акселерометров с чувствительной системой гравиметра 2, Vr - линейная скорость объекта, β - угол между вектором скорости Vн и плоскостью горизонта, α - путевой угол объекта, ρ - радиус кривизны,  - ускорение неподвижного гравиметра 2,
- ускорение неподвижного гравиметра 2,  - ускорение, измеряемое первым акселерометром,
- ускорение, измеряемое первым акселерометром,  - ускорение, измеряемое вторым акселерометром.
- ускорение, измеряемое вторым акселерометром.
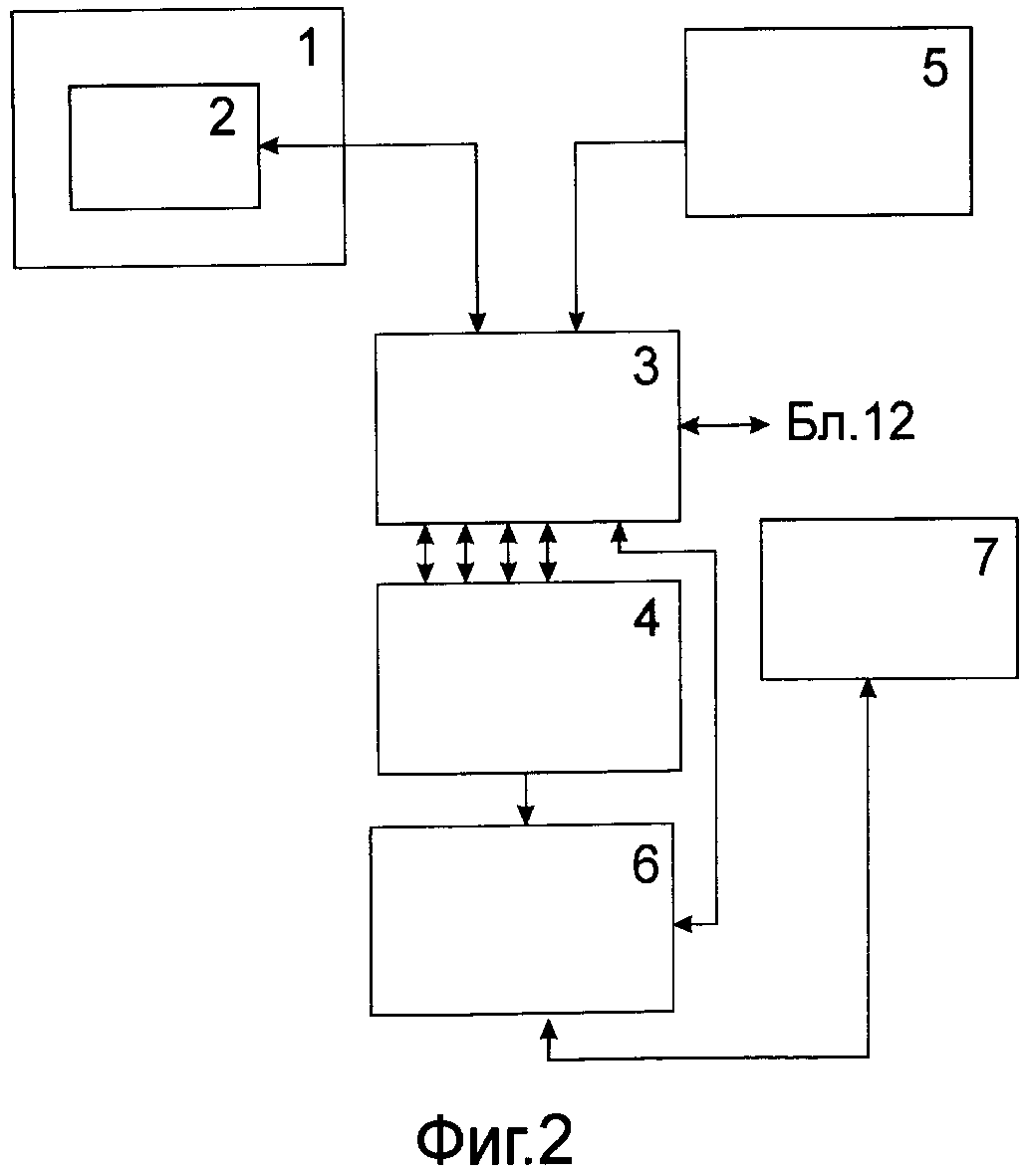
Фиг.2. Структурная схема устройства для осуществления заявляемого способа. Устройство содержит расположенную на стабилизированной в плоскости горизонта платформе 1 гравиметр 2, блок управления 3, блок 4 определения значений β и ρ, навигационное средство 5 для определения широты места, путевого угла и вычисления абсолютной скорости чувствительной системы гравиметра, что позволяет определить угол β между вектором абсолютной скорости чувствительной системы 2 и платформой 1, а также радиус кривизны ρ траектории движения чувствительной системы 2, выход которой через блок управления 3 подключен к входу вычислителя 6, выход которого, в свою очередь, подключен к регистратору 7. Вход-выход гравиметра 2 и вход-выход навигационного средства 5 соединены через блок управления 3 с входом блока 4 определения значений β и ρ, выход которого соединен с входом вычислителя 6, второй вход которого соединен с вторым выходом блока управления, а выход блока 6 соединен со входом регистратора 7.
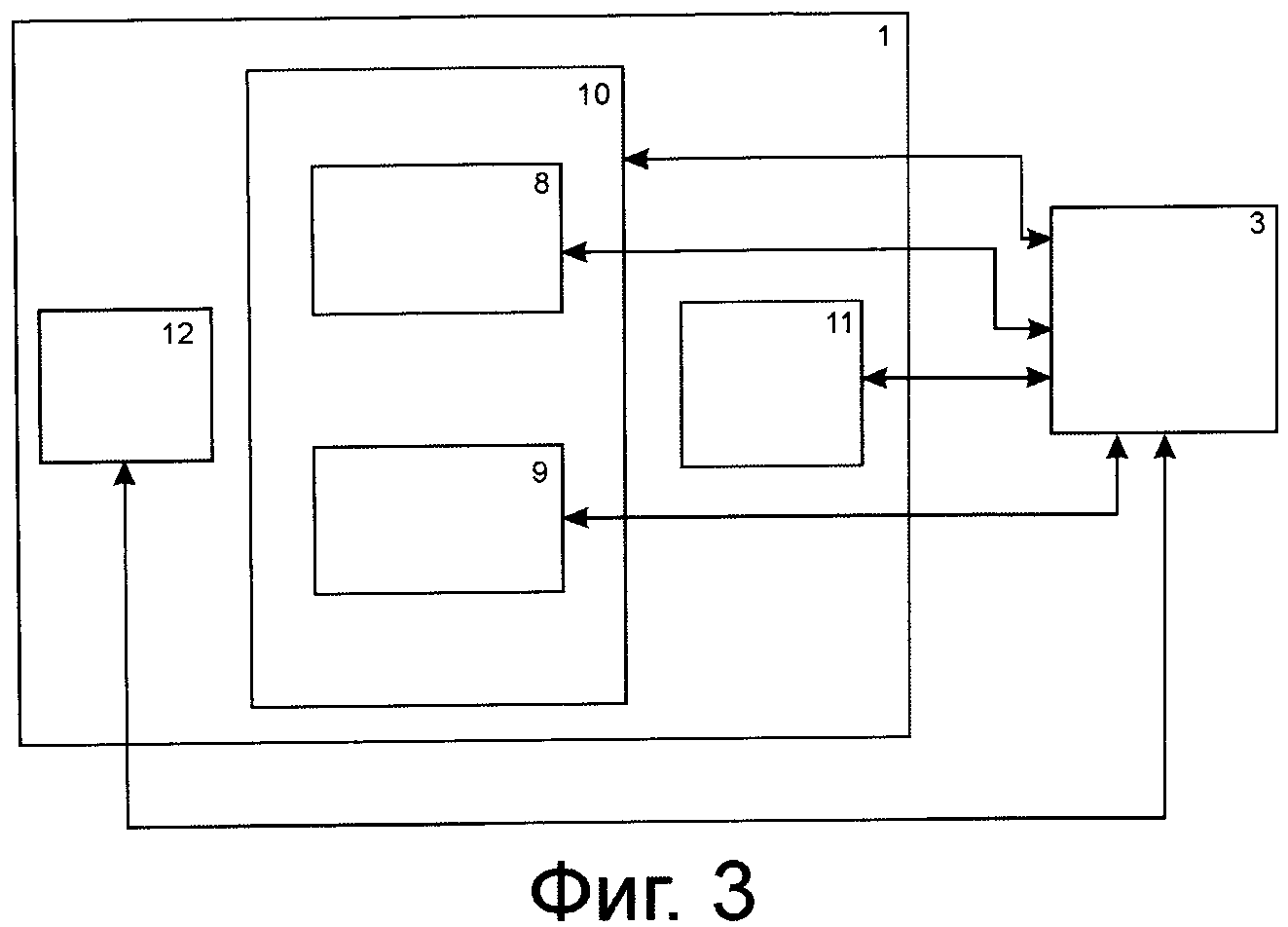
Фиг.3. Блок-схема блока 4. Блок 4 содержит первый и второй акселерометры 8 и 9 соответственно, механизм 10 перемещения акселерометров 8 и 9 навстречу друг другу, измеритель 11 линейной скорости перемещения относительно объекта чувствительных элементов акселерометров 8 и 9, регистратор 12 моментов встречи акселерометров 8 и 9 на траверзе с чувствительной системой гравиметра 2.
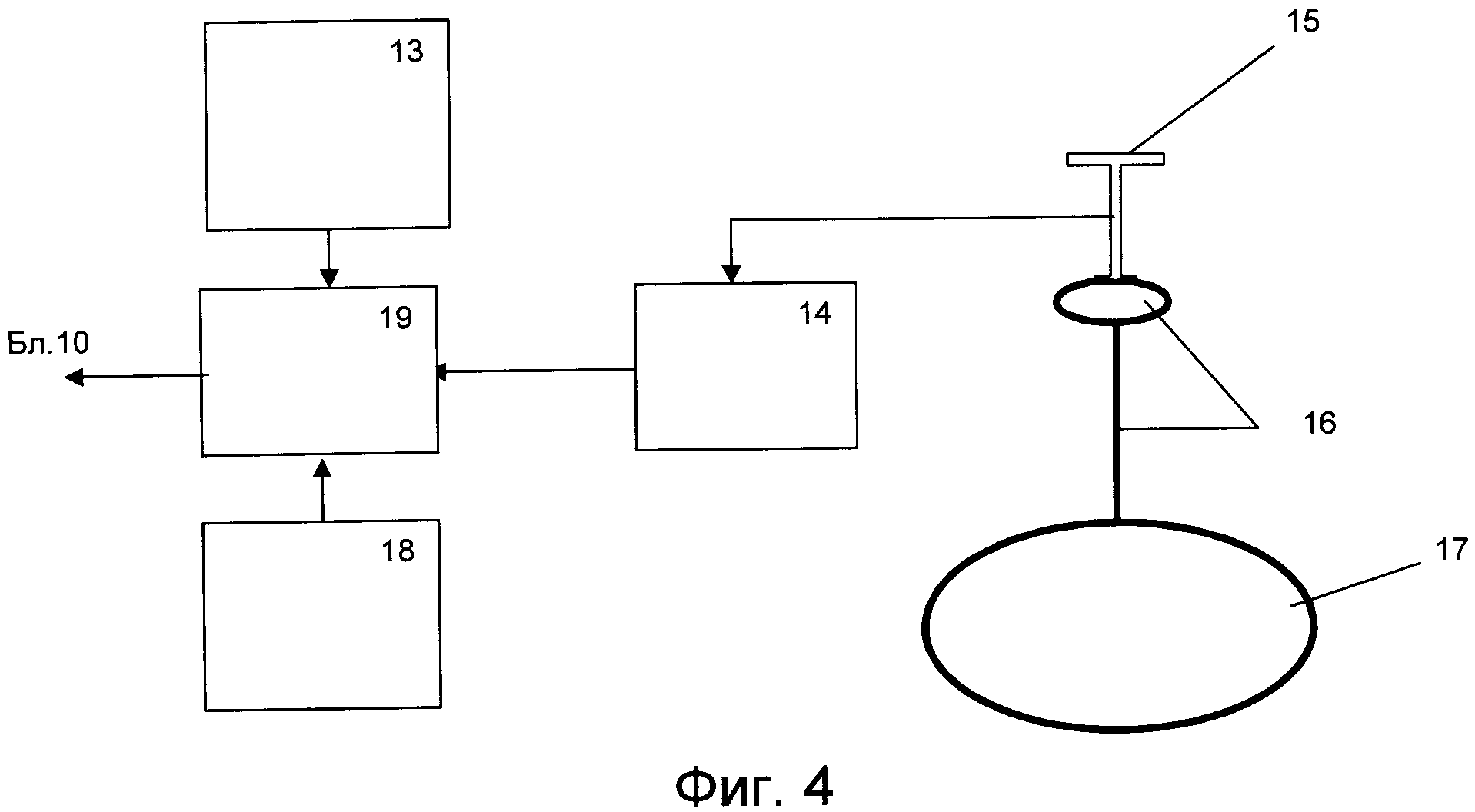
Фиг.4. Блок-схема навигационного средства 5. Навигационное средство 5 включает гидроакустический измеритель скорости 13, приемник 14 спутниковой радионавигационной системы, антенна 15 которого размещена на буйрепе 16 подводного подвижного объекта 17 и датчиков 18 линейных и угловых перемещений подвижного объекта, вычислитель 19.
Блок 4 определения значений (и (установлен на стабилизированной в плоскости горизонта платформе 1 и содержит первый и второй акселерометры 8 и 9 соответственно, с вертикальными осями чувствительности, механизм 10 перемещения акселерометров 8 и 9 навстречу друг другу, измеритель 11 линейной скорости перемещения относительно объекта чувствительных элементов акселерометров 8 и 9 навстречу друг другу по направлению пути движения объекта в плоскости горизонта с постоянной линейной относительно объекта скоростью Vr, регистратор 12 моментов встречи чувствительных элементов акселерометров 8 и 9 на траверзе с чувствительной системой гравиметра 2.
Механизм 10 перемещения акселерометров 8 и 9 навстречу друг другу состоит из двигателя, редуктора, червячных передач.
Измеритель 11 линейной скорости перемещения относительно объекта чувствительных элементов акселерометров 8 и 9 навстречу друг другу по направлению пути движения объекта в плоскости горизонта с постоянной линейной относительно объекта скоростью Vr может быть выполнен в виде интерферометра Майкеквеона или тахометра.
Регистратор 12 моментов встречи чувствительных элементов акселерометров 8 и 9 на траверзе с чувствительной системой гравиметра 2 выполнен в виде фотометрического датчика.
Гидроакустический измеритель скорости 13 представляет собой доплеровский гидроакустический лаг с измерителем скорости звука и предназначен для измерения продольной и поперечной составляющей скорости подвижного объекта. В гидроакустическом измерителе скорости предусмотрено цифровое разделение лучей. Для разделения лучей использовано восьмиканальное усиление с АРУ и с фильтрами, осуществляющими необходимую частотную селекцию принимаемых сигналов и режекцию на частоте излучения в непрерывном режиме излучения. Разделение четырех лучей осуществляется программно на процессоре типа ADSP-21990, который по интерфейсу RS-232 соединен с приемником 14 спутниковой радионавигационной системы и датчиками 18 линейных и угловых перемещений подвижного объекта.
Приемник 14 спутниковой радионавигационной системы представляет собой приемоиндикатор типа «Бриз-К» с приемником корректирующей информации на частоте 313,5 Гц со скоростью приема 200 Бод.
Антенна 15 приемника 14 спутниковой радионавигационной системы размещена на буйрепе 16 подводного подвижного объекта 17, что позволяет принимать радиосигналы в подводном положении. На надводном подвижном объекте антенна 15 приемника 14 спутниковой радионавигационной системы размещена на мачте.
Датчики 18 линейных и угловых перемещений подвижного объекта представляют собой прецизионные микродатчики.
Определение УСТ на движущемся объекте заявленным способом и устройством производится следующим образом.
При движении объекта-носителя заданным курсом по управляющим электрическим сигналам, формирующимся в блоке управления 3, чувствительная система гравиметра 2 вырабатывает электрические сигналы, пропорциональные УСТ  без учета поправки Этвеша, которые поступают в вычислитель 6. От навигационного средства 5 сигналы, пропорциональные абсолютной скорости Vн, путевому углу α и широте места φ объекта-носителя, поступают в вычислитель 6.
без учета поправки Этвеша, которые поступают в вычислитель 6. От навигационного средства 5 сигналы, пропорциональные абсолютной скорости Vн, путевому углу α и широте места φ объекта-носителя, поступают в вычислитель 6.
Абсолютная скорость объекта Vн определяется по формуле:

где Vx, Vy - горизонтальные составляющие вектора скорости;


где Vхл, Vул - измеренные гидроакустическим измерителем скорости 13 составляющие вектора скорости;
ψ, θ - углы качек;
Vz - вертикальная составляющая вектора скорости.
Вычислитель 6 по управляющим сигналам, формируемым в блоке управления 3, вырабатывает электрические сигналы, пропорциональные ускорениям  и
и  и производит вычисления искомых УСТ ускорения силы тяжести g0, угла β между вектором абсолютной скорости Vн движения объекта и плоскостью горизонта, радиуса кривизны ρ траектории движения чувствительной системы гравиметра.
и производит вычисления искомых УСТ ускорения силы тяжести g0, угла β между вектором абсолютной скорости Vн движения объекта и плоскостью горизонта, радиуса кривизны ρ траектории движения чувствительной системы гравиметра.
Оценка точности определения ускорения силы тяжести предлагаемым техническим решением, например, для случая, когда cos φ=1, sin α=1, Vн=9,25 м/с, ρ=106 м, погрешность определения абсолютной скорости объекта mVн=0,01 уз показала, что величина mg не превышает 1 мГл.
При использовании заявленных изобретений обеспечивается по сравнению с известными способами и устройствами расширение функциональных возможностей при определении ускорения силы тяжести на движущемся объекте, а также снижение массогабаритных характеристик и материальных затрат при определении ускорения силы тяжести на движущемся объекте, что позволяет их использовать на маломерных подвижных объектах.
Помимо повышения точности при использовании заявленных изобретений обеспечивается автономность определения УСТ и упрощается процесс определения УСТ.
Источники информации.
1. Патент RU №1760875 С, 27.03.1995.
2. Патент RU №2144686 С1, 20.01.2000.
3. Патент RU №2128851 С1, 10.04.1999.
4. Патент RU №2150132 С1, 27.05.2000.
5. Патент RU №4015 U1, 16.04.1997.
6. Патент US №3803916 А, 16.04.1974.
7. Патент US №4550601 А, 05.11.1985.
8. Патент ЕР №0295297 А1, 21.12.1988.
9. Патент RU №2016383 С1, 15.07.1994.
10. Юзефович А.П., Огородова Л.В. Гравиметрия. - М., 1980, с.160-164.
11. Патент RU №2324207 С1, 10.05.2008.
12. Патент RU №2479859, 20.04.2013.








Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях
Система экстренной эвакуации персонала морских платформ в ледовых условиях
Комплекс аварийной эвакуации на лёд персонала и экипажа морских платформ
Индивидуальное теплозащитное средство
Устройство герметизации дефектов оболочек космических аппаратов
Система эвакуации на лёд персонала аварийных нефтегазовых платформ
Способ определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, и устройство для определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории
Измеритель скорости локомотива
Способ геохимической разведки
Плавучее устройство для сбора разлитой по воде нефти
Способ обнаружения терпящих бедствие и устройство для его осуществления
Способ определения места утечки жидкости или газа из трубопровода, находящегося в грунте, и устройство для его реализации
Способ обнаружения дефектов в трубопроводах
Устройство поиска мест утечек магистральных трубопроводов
Гидрохимическая донная обсерватория
Система для обнаружения человека, терпящего бедствие на воде
Способ диагностики магистральных трубопроводов и устройство для его осуществления
Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории

