Результат интеллектуальной деятельности: УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству определения ускорения.
[0002] В традиционном устройстве определения ускорения на основе сигнала датчика ускорения транспортного средства в остановленном или неподвижном состоянии и другого сигнала датчика ускорения в переходном состоянии, в котором транспортное средство переходит от неподвижного состояния к состоянию движения, погрешность вследствие ухода параметров, обусловленная изменением температуры или износом, вычисляется для использования в корректировке нулевой точки датчика ускорения. Пример такой технологии, относящейся к этому описанию, раскрыт в патентном документе 1.
Документ предшествующего уровня техники
Патентный документ
[0003] Патентный документ 1: Выложенная публикация японской патентной заявки № 2008-145151.
Сущность изобретения
Задача, которая должна быть решена изобретением
[0004] Однако на предшествующем уровне техники, описанном выше, сигнал ускорения, определенный во время перехода от неподвижного состояния к состоянию движения, включает в себя компонент вибрации кузова транспортного средства вследствие неровной дороги или движения пассажира в транспортном средстве. Таким образом, проявляется тенденция вычисления излишней величины корректировки, что приведет к проблеме ухудшения точности корректировки. Настоящее изобретение направлено на предоставление устройства определения ускорения, которое может пресекать ухудшение точности корректировки.
Механизм решения задачи
[0005] Согласно настоящему изобретению, при корректировке нулевого положения датчика ускорения на величину корректировки на основе сигнала датчика ускорения в переходном состоянии из остановленного состояния в состояние движения величина корректировки будет ограничена или будет установлен ее предел.
Результаты изобретения
[0006] Следовательно, согласно настоящему изобретению, устанавливая предел или ограничивая величину корректировки, вычисление излишней величины корректировки вследствие неровностей поверхности дороги или движения пассажира будет пресекаться, и может быть предотвращено ухудшение точности корректировки.
Краткое описание чертежей
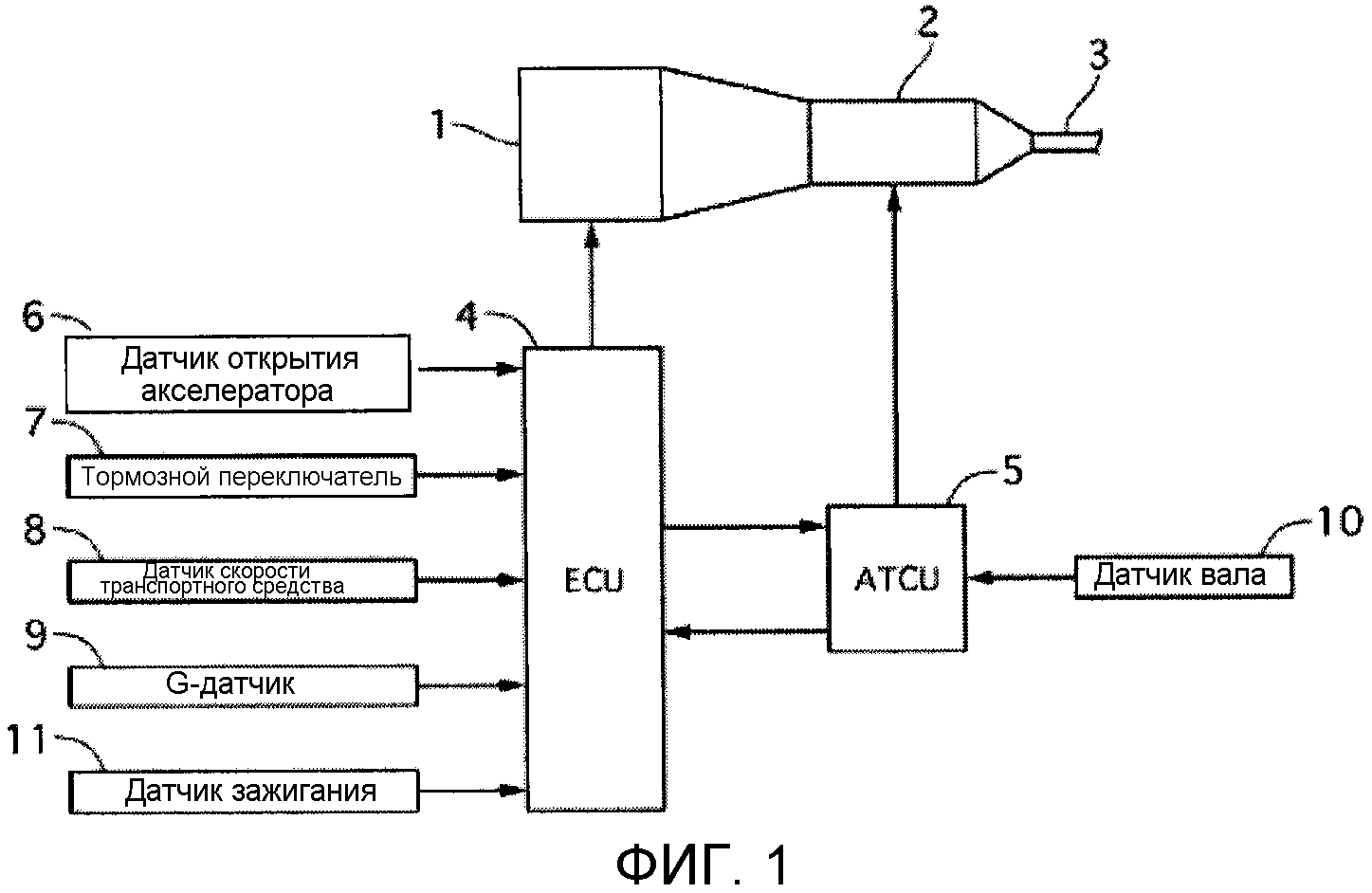
[0007] Фиг. 1 - это схематический чертеж устройства управления "нейтралью", оборудованного устройством определения ускорения в соответствии с первым вариантом осуществления.
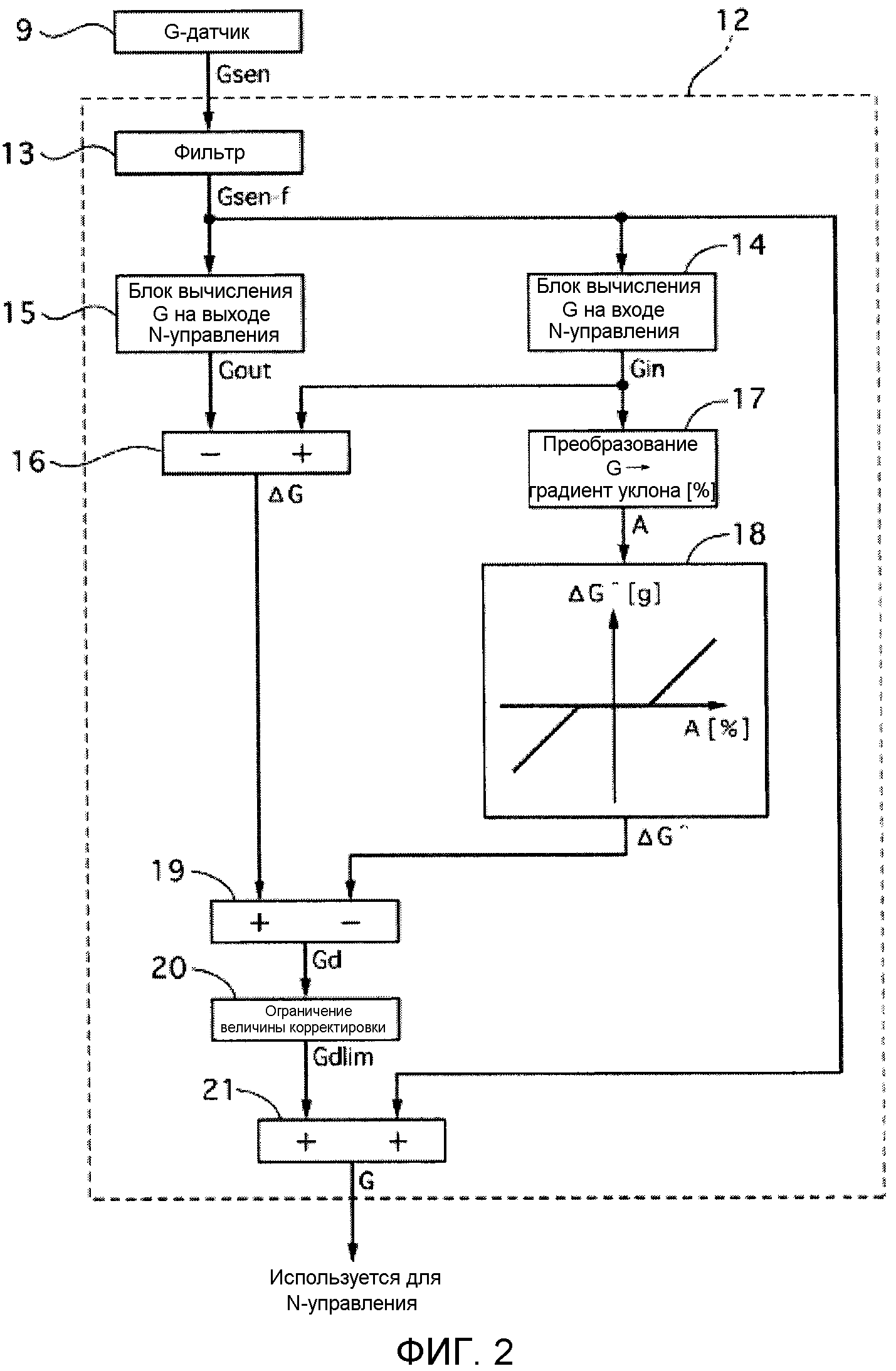
Фиг. 2 - это блок-схема управления, изображающая конфигурацию устройства 12 определения ускорения, размещенного в ECU 4 первого варианта осуществления.
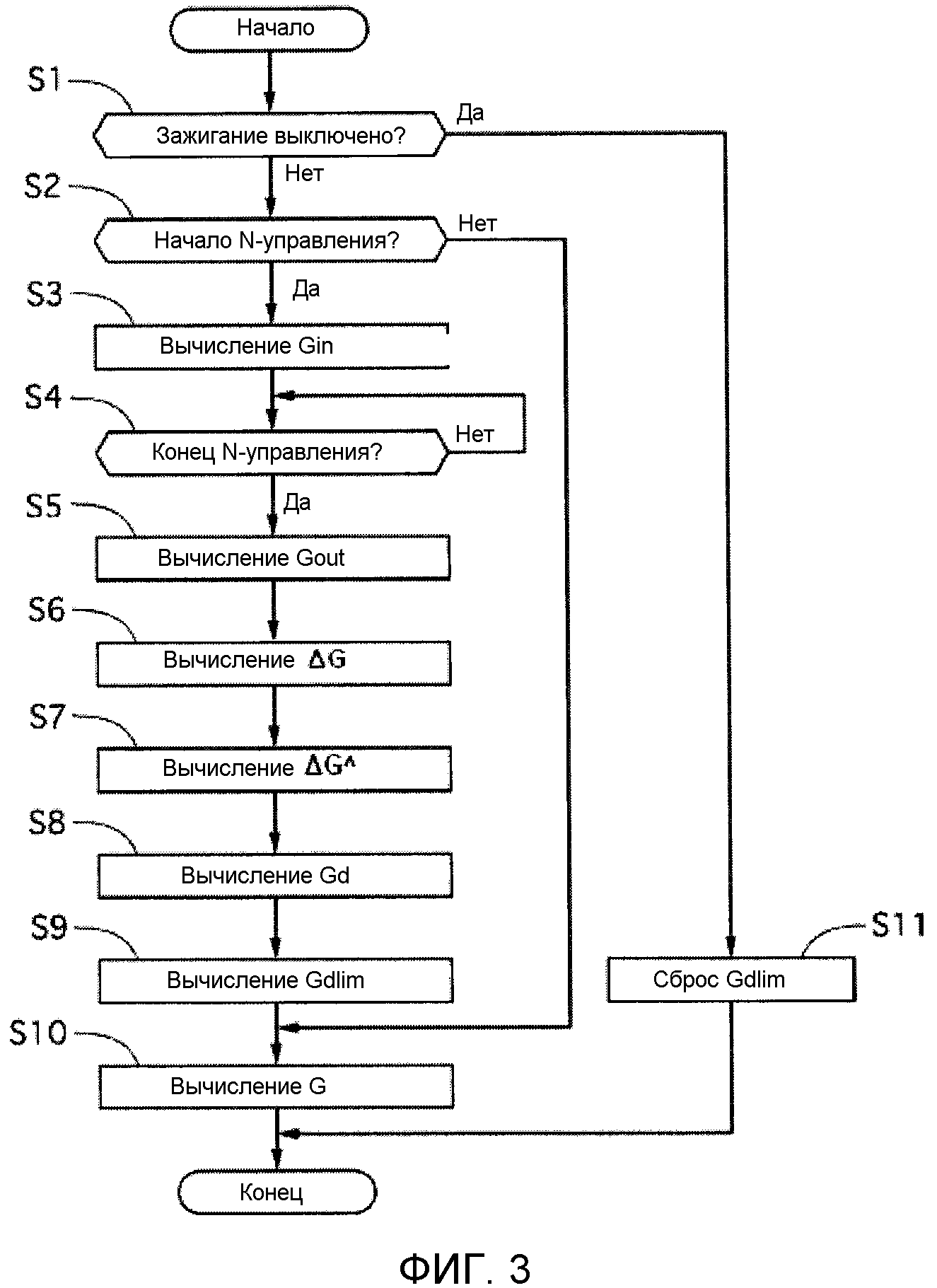
Фиг. 3 - это блок-схема, изображающая последовательность процесса определения ускорения, выполняемого устройством 12 определения ускорения первого варианта осуществления.
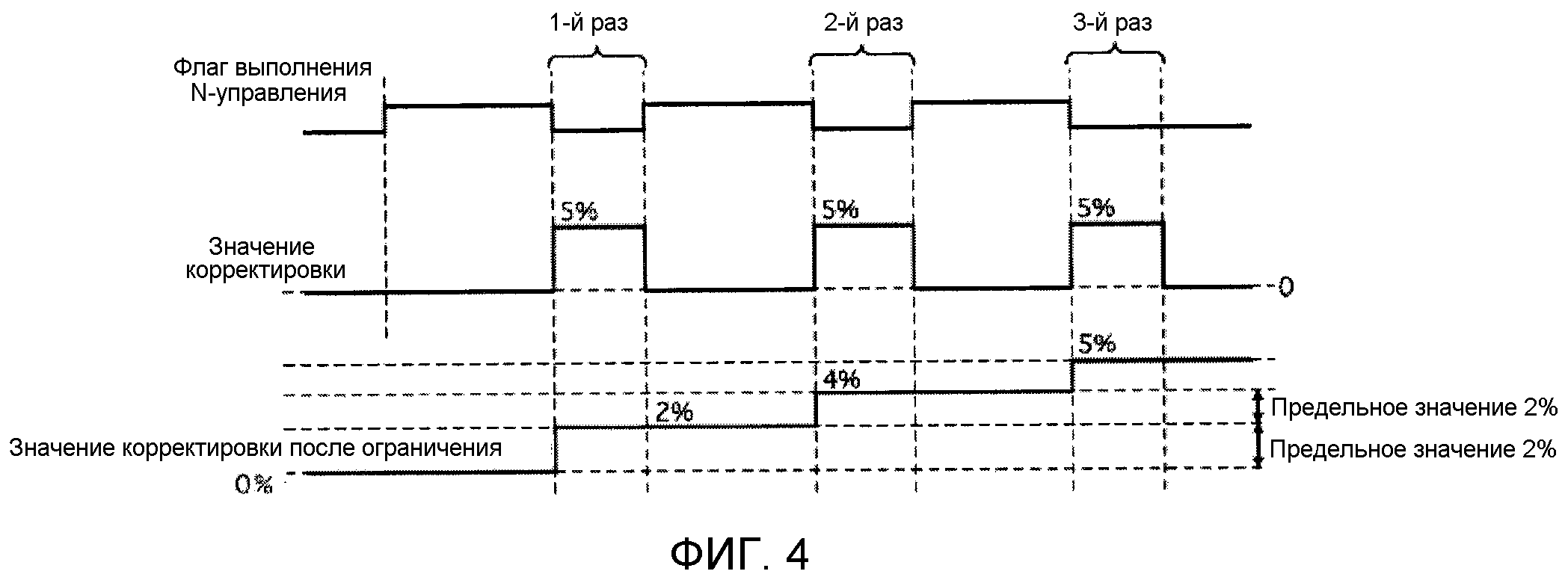
Фиг. 4 - это временная диаграмма, изображающая операцию подавления величины корректировки во время корректировки нулевой точки в первом варианте осуществления.
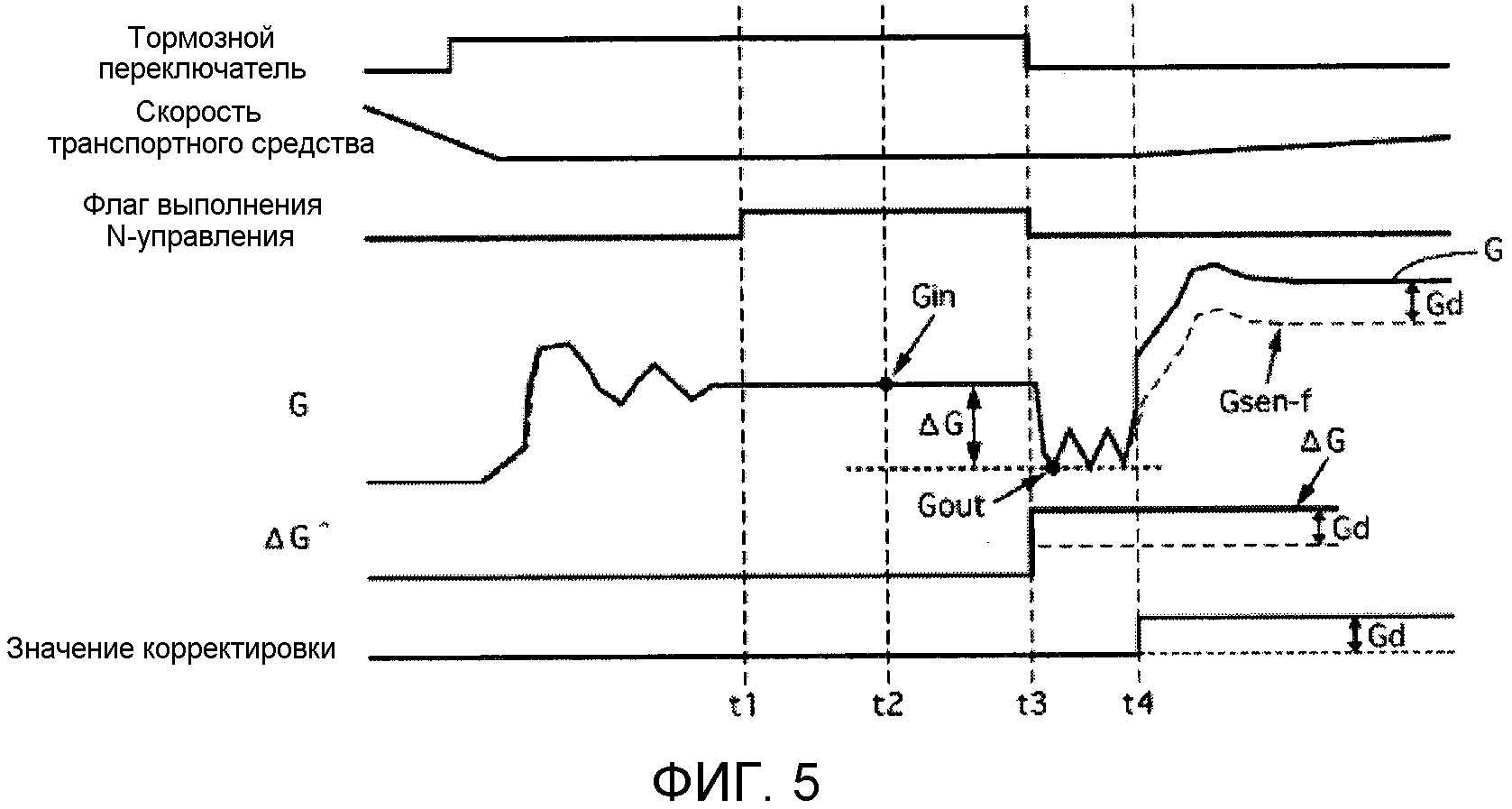
Фиг. 5 - это временная диаграмма, изображающая логику возникновения ошибочной корректировки во время корректировки нулевой точки в традиционной технологии.
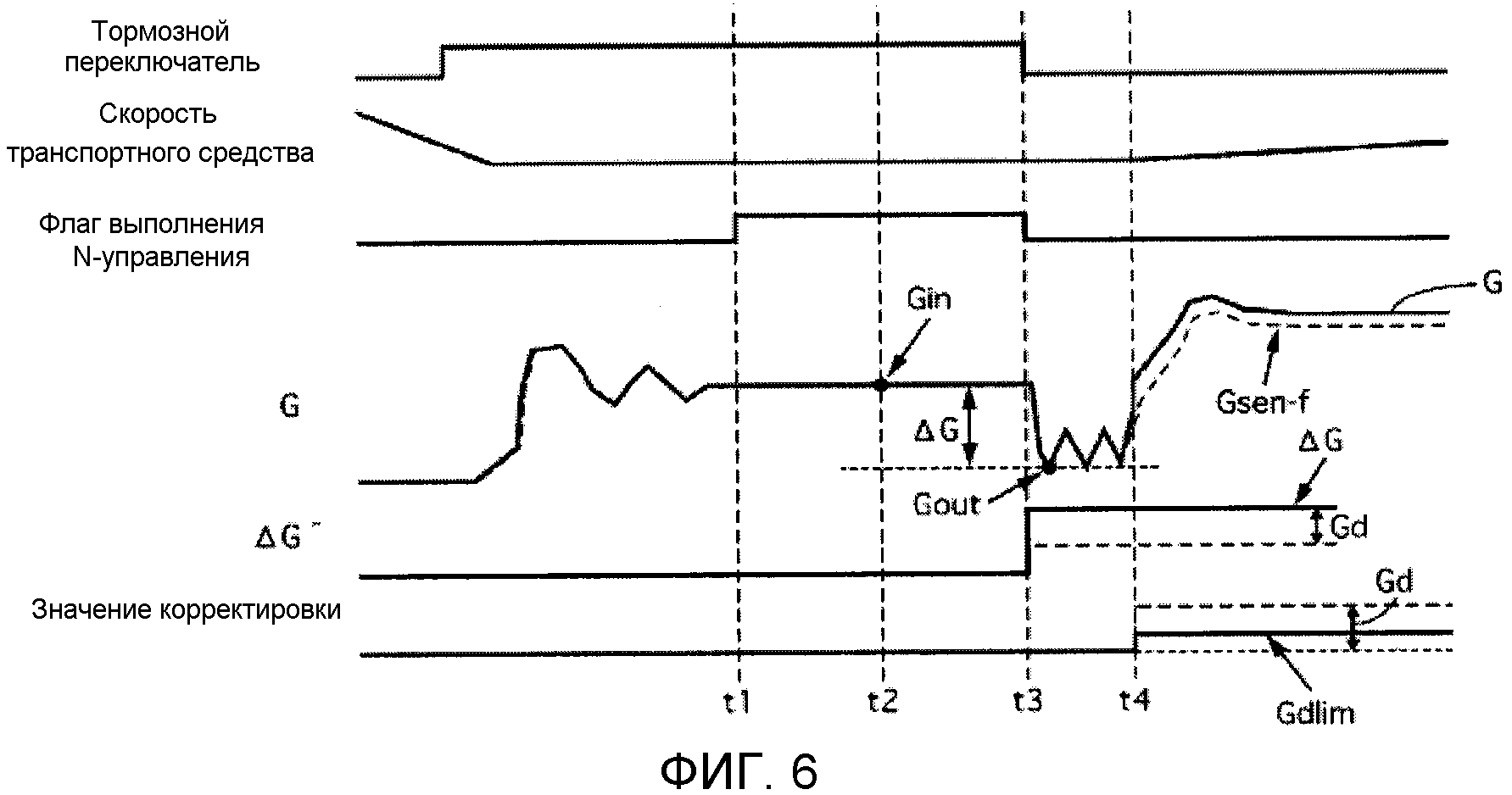
Фиг. 6 - это временная диаграмма, изображающая операцию подавления ошибочной корректировки в первом варианте осуществления.
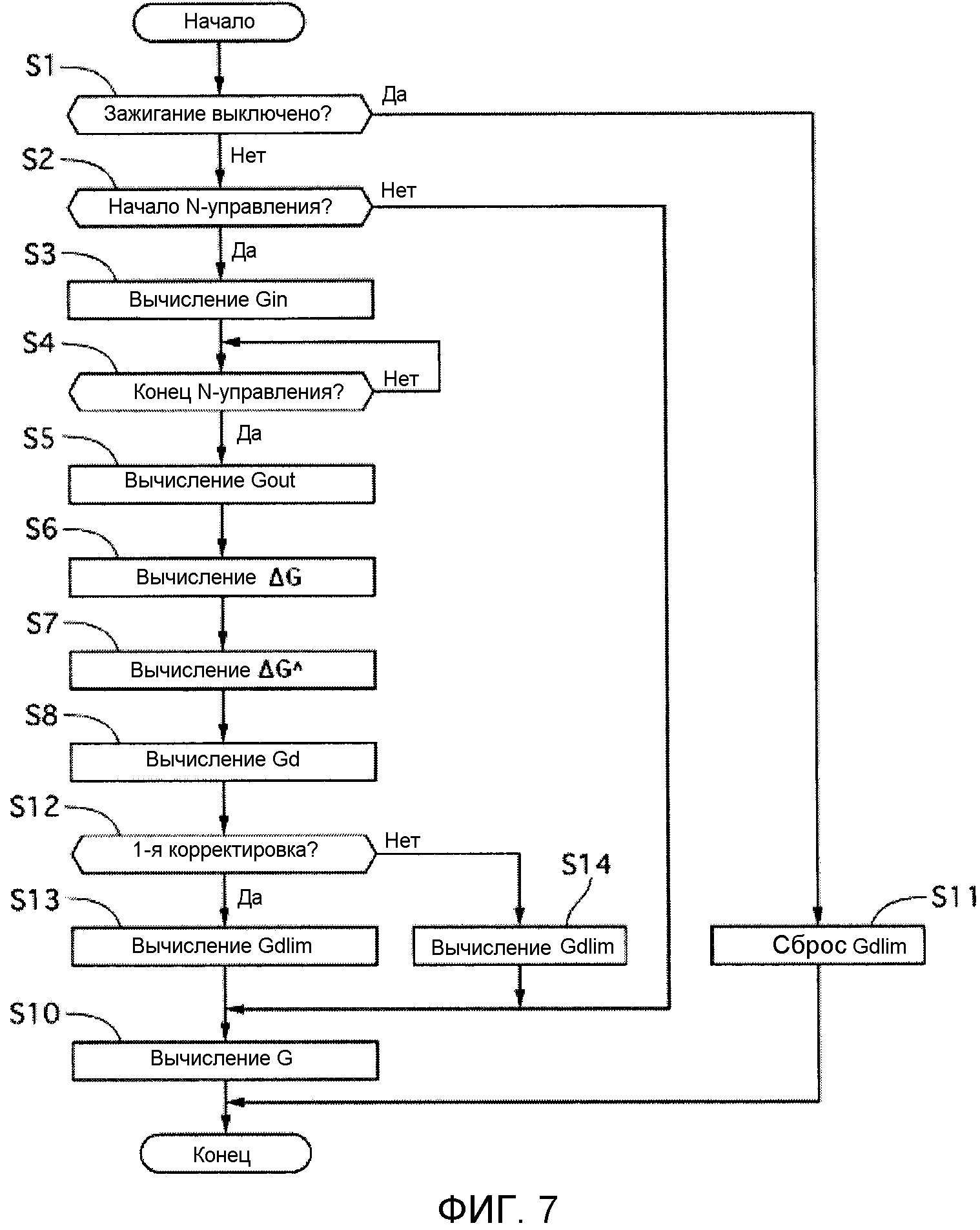
Фиг. 7 - это блок-схема последовательности операций способа, изображающая последовательность процесса определения ускорения, выполняемого устройством 12 определения ускорения второго варианта осуществления.
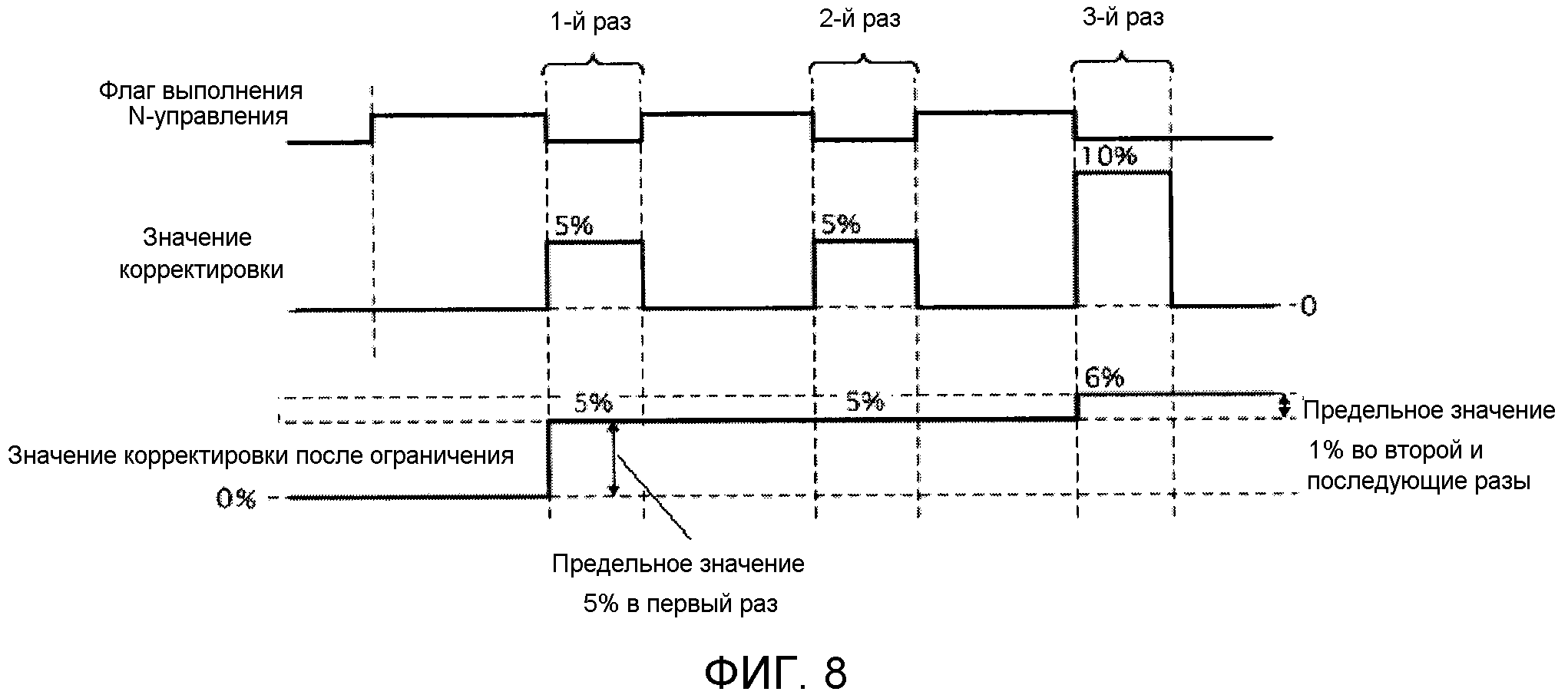
Фиг. 8 - это временная диаграмма, изображающая операцию подавления величины корректировки во время корректировки нулевой точки во втором варианте осуществления.
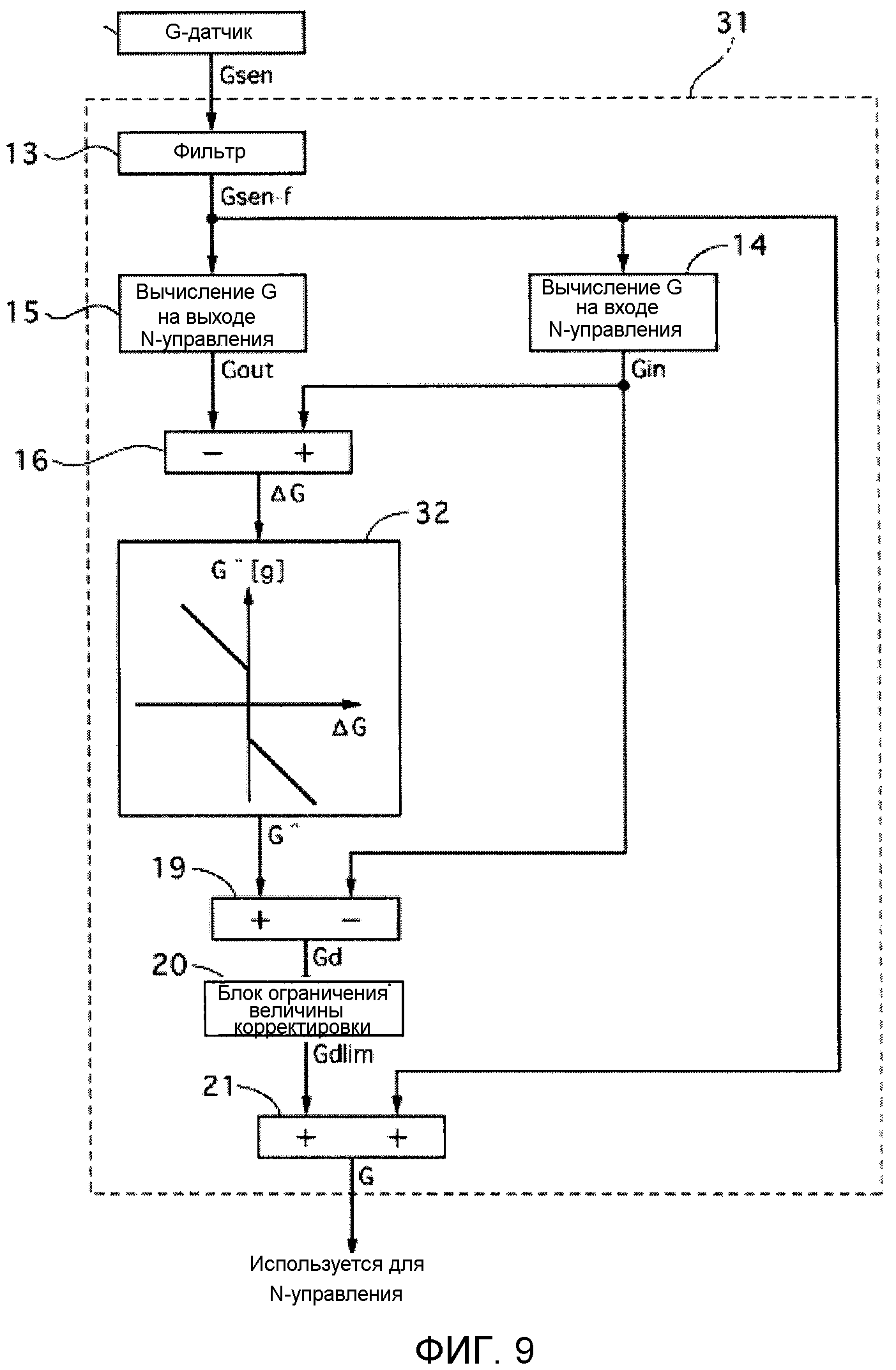
Фиг. 9 - это блок-схема управления, изображающая конфигурацию устройства 31 определения ускорения, размещенного в ECU 4 третьего варианта осуществления.
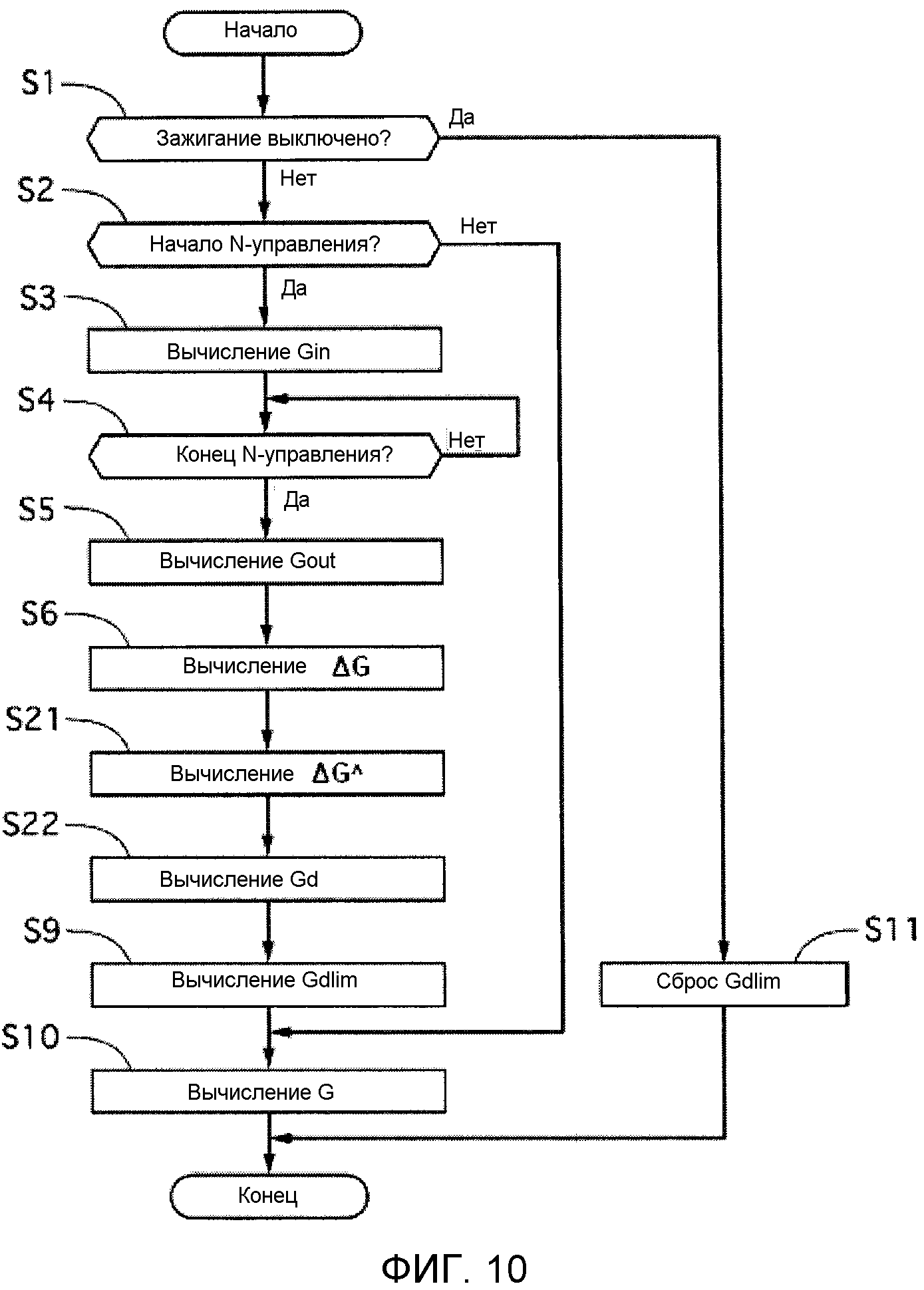
Фиг. 10 - это блок-схема последовательности операций способа, изображающая последовательность процесса определения ускорения, выполняемого устройством 31 определения ускорения третьего варианта осуществления.
Описание условных обозначений
[0008] 9 датчик ускорения
12, 31 устройство определения ускорения
20 блок установления предела или ограничения величины корректировки (средство ограничения величины корректировки)
21 блок корректировки нулевой точки (средство корректировки нулевой точки)
Подробное описание вариантов осуществления изобретения
[0009] Далее будет сделано описание конфигурации для реализации устройства определения ускорения согласно настоящему изобретению на основе вариантов осуществления.
[Первый вариант осуществления]
[Устройство управления "нейтралью"]
Обращаясь к фиг. 1, иллюстрируется схема системы, к которой применено устройство определения ускорения первого варианта осуществления Выходная мощность двигателя 1, после предписанного изменения посредством автоматической трансмиссии 2, соединенной с двигателем 1, выводится от выходного вала 3 к непоказанным ведущим колесам. Транспортное средство оборудовано контроллером 4 двигателя (ECU) и контроллером 5 автоматической трансмиссии (ATCU) для управления двигателем 1 и автоматической трансмиссией 2, соответственно, на основе выходных сигналов различных датчиков и т.п., описанных ниже. Оба контроллера 4, 5 могут обмениваться данными друг с другом.
[0010] Транспортное средство оснащено различными датчиками, такими как датчик 6 открытия акселератора, тормозной переключатель 7, датчик 8 скорости транспортного средств, датчик 9 ускорения (G-датчик), датчик 10 вала и датчик 11 зажигания.
Датчик 6 открытия акселератора обнаруживает открытие акселератора и выводит сигнал открытия акселератора в ECU 4. Тормозной переключатель 7 выводит сигнал тормозного переключателя в ECU 4, указывающий включенное состояние, когда педаль тормоза нажата, и выключенное состояние, когда педаль тормоза не нажата. Датчик 8 скорости транспортного средства обнаруживает скорость движения (скорость транспортного средства) транспортного средства на основе угла поворота каждого колеса, определенного датчиком скорости колеса, установленным на каждом колесе, и выводит сигнал скорости транспортного средства в ECU 4. G-датчик 9 обнаруживает продольное ускорение, действующее на транспортное средство, и выводит сигнал G-датчика в ECU 4. Датчик 10 вала обнаруживает положение вала автоматической трансмиссии 2 и выводит сигнал положения вала в ATCU 5. Датчик 11 зажигания выводит в ECU 4 сигнал зажигания, который указывает включенное состояние, когда переключатель зажигания включается, или выключенное состояние, когда зажигание выключается.
[0011] ECU 4 выводит запрос в ATCU 5 для расцепления муфты (главной муфты) автоматической трансмиссии 2, которая включена во время запуска транспортного средства, тем самым, выполняя управление "нейтралью" в нейтральном состоянии, в котором передача движущей силы к ведущим колесам разъединена, когда положение вала автоматической трансмиссии 2 находится в положении переднего хода или привода, транспортное средство удерживается в остановленном состоянии или неподвижном состоянии посредством тормоза без нажатия педали акселератора, и уклон наклонной дороги меньше предварительно определенного угла (5 [%] или меньше как для поднимающихся, так и спускающихся дорог).
Другими словами, ECU 4 будет выполнять управление "нейтралью", предусматривающее, что сигнал положения вала от датчика 10 вала указывает положение привода переднего хода, что сигнал открытия акселератора датчика 6 открытия акселератора равен нулю, что сигнал тормозного переключателя от тормозного переключателя 7 имеет включенное состояние, что сигнал скорости транспортного средства от датчика 8 скорости транспортного средства равен предписанному значению (≈0), и что сигнал ускорения от G-датчика 9 указывает ускорение, которое соответствует наклонной дороге с предписанным углом в 5[%] или менее. В момент времени, в который любое из вышеописанных условий для выполнения управления "нейтралью" больше не удовлетворяется, например, тормозной переключатель становится выключенным, ECU 4 закончит управление "нейтралью" и отправит запрос в ATCU 5, чтобы сцеплять главную муфту автоматической трансмиссии 2.
[0012] [Устройство определения ускорения]
Фиг. 2 - это блок-схема управления, изображающая конфигурацию устройства 12 определения ускорения, размещенного в ECU 4, и устройство 12 определения ускорения первого варианта 1 осуществления снабжено фильтром 13, блоком 14 вычисления G на входе N-управления, блоком 15 вычисления G на выходе N-управления, блоком 16 вычисления ΔG, блоком 17 преобразования G→градиент или уклон, блоком 18 оценки ΔG, блоком 19 вычисления величины корректировки, блоком 20 установления предела или ограничения величины корректировки (средством ограничения величины корректировки) и блоком 21 корректировки нулевой точки (средством корректировки нулевой точки).
Фильтр 13 удаляет компонент шума, включенный в сигнал Gsen [g] G-датчика (приблизительно в диапазоне между 20 и 30 Гц).
Блок 14 вычисления G на входе N-управления вычисляет ускорение Gin [g] на входе N-управления на основе сигнала Gsen-f G-датчика после прохождения через фильтр 13, после того как предварительно определенное время прошло после начала управления "нейтралью". Отметим, что предварительно определенное время - это время, в течение которого вибрация транспортного средства, формирующаяся во время операции остановки, по существу, сводится в одну точку, и сигнал Gsen G-датчика, таким образом, оценивается как не включающий в себя компонент вибрации кузова транспортного средства, ассоциированный с остановкой транспортного средства.
[0013] Блок 15 вычисления выходного или отклоняющегося G для N-управления вычисляет, на основе сигнала Gsen-f G-датчика, проходящего через фильтр 13 с момента времени в конце управления "нейтралью" вплоть до начала передачи движущей силы к ведущим колесам в ответ на сцепление главной муфты в автоматической трансмиссии 2, ускорение Gout [g] на выходе N-управления, который представляет самый дальний интервал от ускорения Gin на входе N-управления.
Более конкретно, ускорение Gout на выходе N-управления представляет максимальное абсолютное значение ускорения, возникающего вследствие отката транспортного средства непосредственно после завершения управления "нейтралью", которое имеет место на наклонной дороге с предварительно определенным градиентом уклона или более.
Блок 16 вычисления ΔG вычисляет определение ΔG [g] величины изменения ускорения, вычитая ускорение Gout на выходе N-управления, вычисленное блоком 15 вычисления G на выходе N-управления, из ускорения Gin на входе N-управления, вычисленного блоком 14 вычисления G на входе N-управления.
Блок 17 преобразования G→градиент преобразует ускорение Gin на входе N-управления, вычисленное блоком 14 вычисления G на входе N-управления, в градиент A [%] поверхности дороги. В первом варианте осуществления градиент для идущей в гору или поднимающейся дороги указан положительным (+), в то время как градиент для спуска или спускающегося уклона - отрицательным (-).
[0014] Блок 18 оценки ΔG вычисляет, на основе градиента поверхности дороги A [%], полученного в блоке 17 преобразования G→градиент, и ссылаясь на соответствие вычисления "градиент - величина изменения ускорения", оценку ΔG^[g] изменения ускорения. Соотношение между градиентом дороги и изменением ускорения транспортного средства, которое возникает вследствие отката транспортного средства при завершении N-управления, остается одним и тем же для одного и того же транспортного средства. Следовательно, соответствие вычисления "градиент - изменение ускорения" может быть получено заранее посредством экспериментов и т.п.
Блок 19 вычисления величины корректировки вычисляет значение Gd [g] корректировки, вычитая оценку ΔG^ величины изменения ускорения, вычисленную в блоке 18 оценки ΔG, из определения ΔG величины изменения ускорения, вычисленного в блоке 16 вычисления ΔG.
Блок 20 установления предела или ограничения величины корректировки вычисляет значение Gdlim корректировки после ограничения, которое ограничивает значение Gd корректировки, вычисленное в блоке 19 вычисления значения корректировки. Специальный способ вычисления значения Gdlim корректировки после ограничения описывается ниже.
Блок 21 корректировки нулевой точки вычисляет значение G определения ускорения, которое корректирует погрешность вследствие ухода параметров для сигнала Gsen G-датчика, складывая значение Gdlim корректировки после ограничения, вычисленное в блоке 20 ограничения величины корректировки, с сигналом Gsen-f G-датчика, проходящим через фильтр 13 (корректировка нулевой точки). Блок 21 корректировки нулевой точки обновляет и сохраняет значение Gdlim корректировки после ограничения каждый раз, когда значение Gdlim корректировки после ограничения вычисляется, после того как переключатель зажигания выключается, и когда зажигание выключено, тогда сохраненное значение Gdlim корректировки после ограничения будет сброшено (=0).
Как обсуждалось выше, значение G определения ускорения, вычисленное таким образом, используется, чтобы решать, осуществлять или нет управление "нейтралью".
[0015] [Процесс определения ускорения]
Фиг. 3 - это блок-схема последовательности операций, показывающая последовательность процесса, который должен выполняться устройством 12 определения ускорения первого варианта осуществления. Сейчас будет выполнено описание каждого этапа. Это управление выполняется повторяющимся образом с предварительно определенным периодом вычисления, пока зажигание включено.
На этапе S1 выполняется определение того, был ли выключен переключатель зажигания или нет, и, если да, управление переходит к этапу S11, а если нет, управление переходит к этапу S2.
На этапе S2 выполняется определение того, было ли начато управление "нейтралью" или нет, и, если да, управление переходит к этапу S3, в то время как при отрицательном определении, к этапу S10.
На этапе S3, в блоке 14 вычисления G на входе N-управления вычисляется ускорение Gin [g] на входе N-управления.
На этапе S4 выполняется определение того, было ли завершено управление "нейтралью" или нет, если да, управление переходит к этапу S5, тогда как если нет, этап S4 повторяется.
[0016] На этапе S5, в блоке 15 вычисления G на выходе N-управления вычисляется ускорение Gout[g] на выходе N-управления (ускорение на выходе управления "нейтралью").
На этапе S6 блок 16 вычисления ΔG вычисляет определение ΔG [g] величины изменения ускорения, вычитая ускорение Gout на выходе N-управления, вычисленное на этапе S5, из ускорения Gin, вычисленного на входе N-управления на этапе S3.
На этапе S7 блок 18 оценки ΔG вычисляет оценку ΔG^ [g] величины изменения ускорения на основе градиента A [%] поверхности дороги, который преобразован блоком 17 преобразования G→градиент, и ссылаясь на соответствие вычисления "градиент - величина изменения ускорения".
На этапе S8 блок 19 вычисления значения корректировки вычисляет значение Gd [g] корректировки, вычитая оценку ΔG^ величины изменения ускорения, которая вычислена на этапе S7, из определения ΔG величины изменения ускорения, которое вычислено на этапе S6. Следовательно, значение Gd корректировки должно принимать положительное значение в случае ΔG>ΔG^, тогда как в случае ΔG<ΔG^ получается отрицательное значение.
[0017] На этапе S9 блок 20 установления предела или ограничения величины корректировки вычисляет значение корректировки после ограничения Gdlim (значение корректировки после ограничения), чтобы ограничивать величину значения Gd корректировки, вычисленного на этапе S8. Вычисление значения Gdlim корректировки после ограничения использует уравнение (1), когда значение Gd корректировки положительное, и использует уравнение (2), когда значение Gd корректировки отрицательное
Gdlim = min (Gd-Gdlimn-1, Gdlv)+Gdlimn-1... (1)
Gdlim = max (Gd-Gdlimn-1,-Gdlv)+Gdlimn-1... (2)
Здесь, Gdlimn-1 является предыдущим значением для значения Gdlim [g] корректировки после ограничения (значением Gdlim корректировки после ограничения, вычисленным при завершении предыдущего управления "нейтралью"), Gdlv является предельным значением, установленным заранее (ускорением [g], соответствующим градиенту поверхности дороги, равному 2 [%]).
[0018] На этапе S10, в блоке 21 корректировки нулевой точки, значение G определения ускорения вычисляется посредством сложения значения Gdlim корректировки после ограничения с сигналом Gsen-f G-датчика после прохождения через фильтр 13, тем самым корректируя погрешность вследствие ухода параметров для сигнала Gsen G-датчика. Отметим, что если управление переходит к этому этапу от этапа S9, значение G определения ускорения вычисляется с помощью сохраненного значения Gdlim корректировки после ограничения, вычисленного на этапе S9, и обновляет сохраненное значение Gdlim корректировки после ограничения. С другой стороны, если управление переходит к этому этапу с этапа S2, определение ускорения G вычисляется с помощью сохраненного значения Gdlim корректировки после ограничения.
На этапе S11, в блоке 21 корректировки нулевой точки, значение Gdlim корректировки после ограничения сбрасывается (в ноль), и управление возвращается.
[0019] Теперь описывается операция.
[Операция корректировки нулевой точки вследствие величины изменения ускорения при откате транспортного средства]
Когда водитель снимает ногу с педали тормоза во время выполнения управления "нейтралью" на наклонной дороге, транспортное средство откатывается назад до тех пор, пока главная муфта автоматической трансмиссии 2 не начнет зацепляться. В устройстве 12 определения ускорения в первом варианте осуществления, осуществляя использование этого изменения ускорения, происходящего вследствие этого отката, погрешность вследствие ухода параметров для сигнала Gsen G-датчика корректируется. Более конкретно, вычисляя как определение ΔG величины изменения ускорения на основе изменения в сигнале Gsen G-датчика (ускорение Gin на входе N-управления - ускорение Gout на выходе N-управления), так и оценку ΔG^ изменения величины ускорения, оцененную посредством сигнала Gsen G-датчика в неподвижном транспортном средстве, на основе разности обеих вычисляется значение Gd корректировки, чтобы корректировать погрешность вследствие ухода параметров для сигнала Gsen G-датчика, чтобы, таким образом, выполнять корректировку нулевой точки по сигналу Gsen G-датчика.
Если существует погрешность вследствие ухода параметров в сигнале G-датчика с изменениями во времени и температуре, ускорение Gin на входе N-управления, которое вычисляется на основе сигнала Gsen G-датчика, отклоняется от истинного значения (фактического ускорения) на погрешность вследствие ухода параметров. С другой стороны, на определение ΔG величины изменения ускорения, представляющее разность между ускорением Gin на входе N-управления и ускорением Gout на выходе N-управления, не влияет погрешность вследствие ухода параметров (т.е. оно не включает в себя погрешность вследствие ухода параметров). Таким образом, беря разницу между определением ΔG величины определения изменения ускорения и оценкой ΔG^ величины изменения ускорения, значение Gd корректировки для исключения погрешности вследствие ухода параметров для сигнала Gsen G-датчика может быть получено с высокой точностью, и может быть реализована более точная корректировка нулевой точки.
[0020] [Операция подавления величины корректировки при корректировке нулевой точки]
Фиг. 4 - это временная диаграмма, изображающая операцию подавления величины корректировки во время корректировки нулевой точки в первом варианте осуществления. Флаг выполнения управления "нейтралью" - это флаг, который устанавливается в состоянии, в котором условие выполнения управления "нейтралью" удовлетворяется.
Блок 20 ограничения величины корректировки устанавливает предел или ограничивает величину увеличения от предыдущего значения Gdlimn-1 во время корректировки нулевой точки предельным значением Gdlv (ускорение, соответствующее градиенту 2%) или ниже, когда значение Gdlim корректировки после ограничения является положительным. Когда значение Gdlim после ограничения является отрицательным, величина уменьшения по сравнению с предыдущим значением Gdlimn-1 будет ограничена предельным значением -Gdlv или более.
Следовательно, как показано на фиг. 4, когда управление "нейтралью" выполняется три раза непосредственно после того, как переключатель зажигания включается, и каждое значение Gd корректировки соответствует ускорению, эквивалентному градиенту 5%, тогда значения Gdlim корректировки после ограничения для первого и второго раза корректировки нулевой точки ограничиваются градиентом 2% и 4%, соответственно, а значение Gdlim после ограничения в третий раз корректировки нулевой точки становится таким же ускорением, что и значение Gd корректировки, соответствующее градиенту 5%.
[0021] [Действие подавления ошибочной корректировки вследствие вибрации транспортного средства]
Фиг. 5 - это временная диаграмма, изображающая логику возникновения ошибочной корректировки во время корректировки нулевой точки в традиционной технологии. Предполагается, что транспортное средство останавливается на дороге с подъемом.
В момент времени t1 условие выполнения управления "нейтралью" удовлетворяется, и управление "нейтралью" начинается.
В момент времени t2, на основе сигнала Gsen-f G-датчика после прохождения через фильтр 13, после того как предварительно определенное время прошло от начала управления "нейтралью", вычисляется ускорение Gin на входе N-управления.
В момент времени t3, поскольку водитель снимает ногу с педали тормоза, чтобы выйти из управления "нейтралью", и в течение периода между временем t3 и вплоть до времени t4, происходит откат транспортного средства.
В момент времени t4 из сигнала Gsen-f G-датчика после прохождения через фильтр 13, такой сигнал Gsen-f G-датчика идентифицируется как ускорение Gout на выходе N-управления, которое позиционируется наиболее отдаленным от ускорения на входе N-управления, чтобы получать определение ΔG величины изменения ускорения и оценку ΔG^ величины изменения ускорения. Значение Gd корректировки затем вычисляется из разности между обеими величинами, и после этого и в течение периода времени до тех пор, пока следующее управление "нейтралью" не закончится, определение градиента будет выполняться для управления "нейтралью" с помощью значения G определения ускорения, которое было скорректировано в отношении погрешности вследствие ухода параметров посредством этого значения Gd корректировки.
[0022] Здесь, в течение периода от момента времени t3 до момента времени t4, когда транспортное средство откатывается назад, и кузов транспортного средства вибрирует, компоненты вибрации в продольном направлении транспортного средства включаются в сигнал Gsen-f G-датчика, который проходит через фильтр 13. Отметим, что в качестве фактора вибрации транспортного средства могут быть рассмотрены такие ситуации, в которых колесо транспортного средства проезжает по неровной поверхности дороги, такой как колея, когда поверхность дороги вибрирует, как, например, на эстакадном мосту и т.п., или пассажир двигается в транспортном средстве. Если амплитуда колебаний равна амплитуде компонента вибрации кузова транспортного средства, сигнал Gsen-f G-датчика после прохождения через фильтр 13 может колебаться, как показано на фиг. 5, и при выборке пиковых точек, пиковая точка с самым удаленным расстоянием от ускорения Gin на входе N-управления выбирается в качестве ускорения Gout на выходе N-управления. Тогда определение ΔG (=Gin-Gout) величины изменения ускорения становится меньшим, чем значение, определенное посредством отката транспортного средства, приводя в результате к тому, что вычисляется избыточное значение Gd (=ΔG-ΔG^) корректировки. Следовательно, для периода времени после времени t4, поскольку значение G определения ускорения будет скорректировано меньше, чем ускорение, соответствующее фактическому градиенту поверхности дороги, даже горизонтальная дорога может быть ошибочно определена как наклонная дорога с более чем 5% градиентом, и управление "нейтралью" может быть не разрешено с ассоциированным ухудшением в потреблении топлива.
[0023] В отличие от этого, в первом варианте осуществления, как показано на фиг. 6, поскольку значение Gd корректировки ограничено значением Gdlim корректировки после ограничения, и, таким образом, величина корректировки (абсолютное значение для значения Gd корректировки) для каждого раза ограничена предельным значением Gdlv (ускорением, соответствующим 2% градиенту уклона) или меньшим, даже если вышеописанное пиковое значение, возникающее из компонента вибрации кузова транспортного средства, выбирается в качестве ускорения Gout на выходе N-управления, вычисление избыточной величины корректировки пресекается, и избегается такая ситуация, в которой значение G определения ускорения корректируется неоправданно меньше, чем ускорение, соответствующее фактическому уклону поверхности дороги.
Дополнительно, поскольку величина изменения величины корректировки за один раз ограничена, реализуя несколько корректировок нулевой точки, в то же время пресекая вычисление избыточного значения корректировки, величина корректировки может постепенно приближаться к фактической погрешности вследствие ухода параметров, так что отклонение значения G определения ускорения от истинного значения может быть подавлено. Например, на фиг. 4 предположим, что погрешность ускорения вследствие ухода параметров соответствует фактическому градиенту в 5%, после операций корректировки нулевой точки первого и второго раза, во время корректировки нулевой точки в третий раз, корректировка может быть задана такой, чтобы соответствовать 5% градиенту уклона.
[0024] В первом варианте осуществления, когда переключатель зажигания выключен, значение Gdlim корректировки после ограничения сбрасывается (в ноль). Как правило, в течение периода времени от момента времени, в который переключатель зажигания был выключен, до момента времени включения, поскольку окружающая температура G-датчика 9 изменяется, погрешность сигнала Gsen G-датчика вследствие ухода параметров также изменяется. Предположим, что значение Gdlim корректировки после ограничения не было бы сброшено, в течение периода вплоть до выполнения управления "нейтралью", существует вероятность того, что сигнал Gsen G-датчика корректировался бы посредством сигнала после ограничения, отделенного от фактической погрешности вследствие ухода параметров. Таким образом, сбрасывая значение Gdlim корректировки после ограничения каждый раз, когда переключатель зажигания выключается, ошибочная корректировка сигнала Gsen G-датчика будет пресекаться во время следующей поездки.
[0025] Теперь выполняется описание технических результатов.
Устройство 12 определения ускорения первого варианта осуществления имеет результаты, перечисленные ниже.
(1) Устройство 12 определения ускорения снабжено блоком 21 корректировки нулевой точки, который корректирует положение нулевой точки сигнала Gsen датчика посредством величины корректировки (абсолютного значения для значения Gd корректировки) на основе ускорения Gout на выходе N-ускорения при переходе от неподвижного состояния транспортного средства к состоянию движения, и блок 20 ограничения величины корректировки, который ограничивает величину корректировки.
Следовательно, вычисление избыточной величины корректировки вследствие вибраций кузова транспортного средства, свойственных неровностям поверхности дороги, вибрациям от поверхности дороги, движению пассажира и т.п., и значение G определения ускорения предохраняется от слишком малой корректировки по сравнению с фактическим уклоном поверхности дороги.
[0026] (2) Блок 20 установления предела или ограничения величины корректировки ограничивает величину изменения от предыдущего значения корректировки, и величина изменения каждый раз также ограничивается. Следовательно, осуществляя корректировку нулевой точки несколько раз, величина корректировки может быть приведена близко к фактической погрешности вследствие ухода параметров постепенно, в то же время пресекая вычисление избыточной величины корректировки, так что отклонение значения G определения ускорения от истинного значения может быть предотвращено.
[0027] [Второй вариант осуществления]
Второй вариант осуществления отличается от первого варианта осуществления в способе вычисления значения Gdlim корректировки после ограничения.
[Процесс определения ускорения]
Фиг. 7 - это блок-схема последовательности операций способа, изображающая последовательность процесса определения ускорения, выполняемого устройством 12 определения ускорения второго варианта осуществления. Далее выполняется описание каждого этапа. Отметим, что, присоединяя тот же номер этапа к этапам, выполняющим тот же процесс, что и в первом варианте осуществления, дублирующее описание опускается. На этапе S12 блок 20 ограничения величины корректировки определяет, происходит или нет корректировка нулевой точки непосредственно после того, как переключатель зажигания включается, и если да, процесс переходит к этапу S13, тогда как, если нет, процесс переходит к этапу S14.
На этапе S13 блок 20 установления предела или ограничения величины корректировки вычисляет значение Gdlim корректировки после ограничения, чтобы ограничивать величину значения Gd корректировки, вычисленного на этапе S8. Используя уравнение (3) ниже, вычисление значения Gdlim корректировки может быть выполнено, когда значение Gd корректировки положительное, в то время как выполняется использование уравнения (4), если значение Gd корректировки отрицательное
Gdlim = min (Gd-Gdlimn-1, Gdlv-1)+Gdlimn-1... (3)
Gdlim = max (Gd-Gdlimn-1,-Gdlv-1)+Gdlimn-1... (4)
Здесь, Gdlv-1 обозначает предварительно заданное предельное значение и соответствует ускорению [g], соответствующему градиенту поверхности дороги, равному 5 [%].
[0028] На этапе S14 блок 20 установления предела или ограничения величины корректировки вычисляет значение корректировки после ограничения, которое устанавливает предел или ограничивает значение Gd корректировки, вычисленное на этапе S8. Используя уравнение (5) ниже, вычисление значения Gdlim корректировки может быть выполнено, когда значение Gd корректировки положительное, в то время как выполняется использование уравнения (6), когда значение Gd корректировки отрицательное
Gdlim = min (Gd-Gdlimn-1, Gdlv-2)+Gdlimn-1... (5)
Gdlim = max (Gd-Gdlimn-1,-Gdlv-2)+Gdlimn-1... (6)
Здесь, Gdlv-2 обозначает предварительно заданное предельное значение, меньшее, чем Gdlv-1, и соответствует ускорению для градиента поверхности дороги в 1 [%].
[0029] Теперь выполняется описание результатов.
[Результат изменения в величине корректировки]
Фиг. 8 - это временная диаграмма, изображающая операцию подавления величины корректировки во время корректировки нулевой точки во втором варианте осуществления.
Блок 20 установления предела или ограничения корректировки устанавливает предел или ограничивает, когда значение Gdlim корректировки после ограничения положительное, величину увеличения от предыдущего значения Gdlimn-1 при корректировке нулевой точки непосредственно после включения переключателя зажигания. Более конкретно, блок 20 ограничения корректировки ограничивает величину увеличения до Gdliv-1 (ускорения, соответствующего 5% градиенту) в первый раз корректировки и ограничивает предельным значением Gdlv-2 (ускорением, соответствующим 1% градиенту) во второй и последующий разы.
Следовательно, как показано на фиг. 8, когда возникает погрешность вследствие ухода параметров, соответствующая ускорению для 5% градиента, непосредственно следом за включением переключателя зажигания, величина корректировки в первый раз корректировки нулевой точки может быть сделана такой же, что и погрешность вследствие ухода параметров. Следовательно, погрешность вследствие ухода параметров может быть скорректирована незамедлительно.
Во второй и последующие разы корректировок нулевой точки, когда выбирается такой сигнал Gsen G-датчика, как ускорение Gout на выходе N-управления, который включает в себя компонент вибрации кузова транспортного средства от неровностей поверхности дороги или перемещения пассажира, величина увеличения значения корректировки от предыдущего значения Gdlim n-1 будет ограничена ускорением, которое соответствует 1% градиенту или менее. Таким образом, вычисление избыточной величины корректировки будет пресечено, и будет предотвращена такая ситуация, в которой определение ускорения G будет чрезмерно малым по сравнению с ускорением, соответствующим фактическому градиенту поверхности дороги.
[0030] Далее, будут описаны технические результаты.
В устройстве 12 определения ускорения второго варианта осуществления, в дополнение к результатам (1) и (2), может быть достигнут следующий результат.
(3) Блок 21 корректировки нулевой точки выполняет корректировку нулевой точки в течение периода между моментом времени, в который переключатель зажигания включается, и временем выключения, каждый раз, когда транспортное средство останавливается с разъединением передачи движущей силы к ведущим колесам, и блок 20 установления предела или ограничения корректировки ограничивает величину корректировки при первоначальной корректировке меньше или менее ограничивает по сравнению с ограничением во время последующих корректировок. Таким образом, более раннее решение погрешности вследствие изменений температуры выполняется совместно с пресечением вычисления чрезмерной величины корректировки вследствие вибраций кузова транспортного средства в конце управления "нейтралью".
[0031] [Третий вариант осуществления]
Третий вариант осуществления отличается от первого варианта осуществления в способе вычисления значения Gd корректировки.
[Устройство определения ускорения]
Фиг. 9 - это блок-схема управления, изображающая конфигурацию устройства 21 определения ускорения, размещенного в ECU 4 третьего варианта осуществления. Устройство определения ускорения третьего варианта 3 осуществления снабжено фильтром 13, блоком 14 вычисления G на входе N-управления, блоком 15 вычисления G на выходе N-управления, блоком 16 вычисления ΔG, блоком 32 оценки ускорения, блоком 19 вычисления значения корректировки, блоком 20 ограничения корректировки и блоком 21 корректировки нулевой точки.
Блок 32 оценки ускорения вычисляет значение G^ [g] оценки ускорения на основе определения ΔG величины изменения ускорения, вычисленного в блоке 16 вычисления ΔG и со ссылкой на соответствие для градиента, эквивалентного вычислению ускорения относительно величины изменения ускорения (соответствие вычисления "величина изменения ускорения - градиент, эквивалентный ускорению"). Соотношение между величиной изменения ускорения транспортного средства вследствие отката транспортного средства в конце N-управления и градиентом поверхности дороги является одним и тем же для одного и того же транспортного средства, и градиент поверхности дороги может быть преобразован в ускорение, соответствие вычисления "величина изменения ускорения - градиент, эквивалентный ускорению" может быть получено заранее посредством экспериментов и т.п.
[0032] [Процесс определения ускорения]
Фиг. 10 - это блок-схема последовательности операций способа, изображающая последовательность обработки, которая должна быть выполнена процессом определения ускорения, выполняемым устройством 31 определения ускорения третьего варианта осуществления. Далее выполняется описание каждого этапа. Тем этапам, которые выполняют тот же процесс, что и в первом варианте осуществления, показанном на фиг. 1, присвоены те же номера этапов, и дублирующее описание их, таким образом, опускается.
На этапе S21 блок 32 оценки ускорения вычисляет значение G^ [g] оценки ускорения на основе определения ΔG величины изменения ускорения, вычисленного на этапе S6, и ссылаясь на соответствие вычисления "величина изменения ускорения - градиент, эквивалентный ускорению".
На этапе S22 блок 19 вычисления значения корректировки вычисляет значение Gd [g] корректировки, вычитая ускорение Gin на входе N-управления, вычисленное на этапе S3, из оценки G^ ускорения, вычисленной на этапе S21.
[0033] Далее выполняется описание операции.
[Операция корректировки нулевой точки на основе величины изменения ускорения во время отката транспортного средства]
Устройство 31 определения ускорения третьего варианта осуществления вычисляет значение Gd корректировки для корректировки погрешности сигнала Gsen G-датчика вследствие ухода параметров на основе разности между оценкой G^ ускорения, получаемой из изменения в сигнале Gsen G-датчика (т.е. ускорение Gin на входе N-управления - ускорение Gout на выходе N-управления), и ускорением Gin на входе N-управления для того, чтобы выполнять корректировку нулевой точки сигнала G-датчика.
Когда погрешность вследствие ухода параметров в сигнале G-датчика возникает вследствие изменения температуры или износа, ускорение Gin на входе N-управления, вычисленное на основе сигнала G-датчика, отклоняется от истинного значения на погрешность вследствие ухода параметров. С другой стороны, оценка G^ ускорения, которая вычисляется из разности между ускорением Gin на входе N-управления и ускорением Gout на выходе N-управления, свободна от влияния погрешности вследствие ухода параметров (т.е. не включает в себя погрешность вследствие ухода параметров). Таким образом, получая разницу между оценкой G^ ускорения и ускорением Gin на входе N-управления, значение корректировки, которое исключает погрешность вследствие ухода параметров в сигнале Gsen G-датчика, может быть получено с такой точностью, что будет достигнута даже более точная корректировка нулевой точки.
Следовательно, в устройстве 31 определения ускорения третьего варианта осуществления проявляются те же результаты, которые достигаются в первом варианте осуществления.
[0034] (Другие примеры)
Хотя конфигурация для реализации настоящего изобретения была описана выше со ссылкой на варианты осуществления, конкретные конфигурации настоящего изобретения не ограничиваются этими вариантами осуществления, конструктивные изменения и т.п. без отступления от сути настоящего изобретения могут быть включены в настоящее изобретение.
Например, способ вычисления значения Gdlim корректировки после ограничения во втором варианте осуществления может быть применен к третьему варианту осуществления.
Способ корректировки значения G определения ускорения согласно настоящему изобретению может не ограничиваться применением при завершении управления "нейтралью", но равно применим во время управления системой "стоп-старт" с аналогичными результатами, что и в вариантах осуществления.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

