Результат интеллектуальной деятельности: СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ГИБКОГО ТРУБЧАТОГО ЭЛЕМЕНТА, СОЕДИНЕННОГО С ЧАШЕОБРАЗНЫМ ЭЛЕМЕНТОМ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к системе позиционирования по меньшей мере одного трубчатого элемента, соединенного с чашеобразным элементом, которая содержит позиционирующий механизм, выполненный с возможностью удерживания чашеобразного элемента и трубчатого элемента в запаркованном положении в магазине, когда чашеобразный элемент не используется, и допускает вытягивающее движение чашеобразного элемента и трубчатого элемента из запаркованного положения в положение закрепления на соске животного.
Доильные стаканы обычно оснащены трубками молокопровода и вакуум-провода. В автоматической доильной системе доильные стаканы крепятся к соскам коровы рукой робота. Рука робота захватывает доильные стаканы, находящиеся в магазине доильных стаканов, и перемещает их к соответствующему соску коровы. Во время этого движения трубки молокопровода и вакуум-провода соответствующих доильных стаканов вытягиваются из магазина. Важно, чтобы трубки не вытягивались на слишком большую длину и не контактировали с поверхностью пола, на котором стоит корова. В этом случае существует риск, что того, что корова наступит на трубку молокопровода или на трубку вакуум-провода и заблокирует поток в этих трубках. Также существует риск, что зацепит трубки молокопровода и вакуум-провода, в результате чего доильный стакан отсоединится от соска. В обоих случаях сосок коровы будет выдоен не полностью. Важно, чтобы трубки молокопровода и вакуум-провода выдвигались настолько, чтобы доильный стакан, прикрепленный к соску, висел на соске по существу вертикально. Если трубки будут вытянуты на недостаточную длину, они будут прикладывать к стакану силу, направленную вбок. В этом случае процесс доения может быть нарушен, и возникает риск отсоединения доильного стакана от соска. У разных коров в стаде, когда они стоят, соски расположены на разной высоте от поверхности земли. При доении коров, соски которых расположены низко над поверхностью земли, увеличивается риск контакта доильных стаканов с поверхностью пола в доильном станке. Кроме того, коровы в процессе доения в доильном станке обычно могут становиться в немного отличающиеся друг от друга положения относительно магазина доильных стаканов. Поэтому расстояние между магазином доильных стаканов и коровой может изменяться даже во время доения одной и той же коровы. Ввиду этих фактов трудно заранее установить подходящую высвобождаемую длину трубок молокопровода и вакуум-провода, пригодную для всех стадий доения в доильном станке.
В автоматической доильной системе, в которой рука робота постоянно расположена в доильном станке, вышеописанная проблемы решена следующим образом. Когда рука робота подходит и подсоединяет доильные стаканы к соскам коровы в доильном станке, трубки молокопровода и вакуум-провода доильных стаканов вытягиваются на относительно большую длину. Тем самым исключается риск того, что трубки будут слишком коротки. Во время последующего процесса доения рука робота удерживает трубки доильных стаканов в поднятом состоянии так, чтобы не возник риск контакта трубок с поверхностью пола в доильном станке. Однако такое решение не работает в автоматической доильной системе, в которой рука робота, крепящая доильные стаканы к коровам во множестве доильных станков, например, на вращающейся доильной платформе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в создании системы позиционирования трубчатого элемента, соединенного с чашеобразным элементом, который обеспечивает то, что трубчатый элемент будет вытянут на подходящую высвобождаемую длину по существу во всех случаях, когда чашеобразный элемент подсоединяют к соску животного.
Эта задача решается настоящим изобретением за счет того, что система позиционирования содержит управляющее устройство, которое выполнено с возможностью рассчитывать индивидуально адаптированную длину трубчатого элемента в ответ на информацию от детекторного средства, выполненного с возможностью определять параметр, позволяющий рассчитывать положение соска животного, причем управляющее устройство также выполнено с возможностью управлять механизмом позиционирования так, что он регулирует высвобождаемую длину трубчатого элемента до определенной индивидуально адаптированной высвобождаемой длины. Посредством такой регулировки можно вытягивать этот трубчатый элемент на индивидуально адаптированную длину практически во всех случаях, когда чашеобразный элемент прикреплен к соску животного.
Согласно варианту настоящего изобретения механизм позиционирования выполнен с возможностью управлять движением вытягивания трубчатого элемента, когда чашеобразный элемент перемещается из запаркованного положения в положение крепления к соску так, чтобы этот трубчатый элемент не вытягивался на длину, превышающую определенную высвобождаемую длину. Когда чашеобразный элемент захватывается в магазине и переносится к соску, механизм позиционирования предотвращает вытягивание трубчатого элемента на длину, превышающую определенную высвобождаемую длину. Если трубчатый элемент был вытянут на определенную высвобождаемую длину, механизм позиционирования блокирует дальнейшее вытягивание трубчатого элемента. Альтернативно, механизм позиционирования не адаптирован для управления вытягиванием трубчатого элемента, когда чашеобразный элемент вытягивается из запаркованного положения в положение крепления на соске, но вместо этого механизм позиционирования адаптирован для регулировки высвобождаемой длины до определенной высвобождаемой длины, когда чашеобразный элемент прикреплен к соску. В этом случае трубчатый элемент вытягивается на подходящую длину во время процесса крепления элемента в форме соска. Как только элемент в форме соска будет прикреплен к соску или спустя непродолжительное время механизм позиционирования активируется так, чтобы отрегулировать фактическую длину трубчатого элемента до определенной высвобождаемой длины. В этом случае трубчатый элемент во время крепления можно вытягивать на длину, превышающую определенную высвобождаемую длину.
Согласно варианту настоящего изобретения управляющее устройство выполнено с возможностью определения подходящей высвобождаемой длины трубчатого элемента так, чтобы самая нижняя часть трубчатого элемента находилась по меньшей мере на уровне, расположенном на минимальной высоте над поверхностью пола, на котором стоит животное. Такой самый нижний допустимый уровень может находиться, например, на высоте 10 см от поверхности пола. В этом случае управляющее устройство рассчитывает высвобождаемую длину трубчатого элемента, при которой самая нижняя часть трубчатого элемента будет находиться на этом самом низком допустимом уровне или на более высоком уровне над поверхностью пола. Тем самым, риск того, что животное наступит на трубчатый элемент или заденет его так, что чашеобразный элемент отсоединится, по существу устраняется.
Согласно варианту настоящего изобретения управляющее устройство выполнено с возможностью определения подходящей высвобождаемой длины трубчатого элемента так, чтобы самая нижняя часть трубчатого элемента находилась на уровне, расположенном на по меньшей мере минимальном расстоянии ниже уровня чашеобразного элемента. Такое минимальное расстояние может составлять, например, 10 см. В этом случае управляющее устройство рассчитывает высвобождаемую длину трубчатого элемента, при которой его самая нижняя часть будет находиться на этом минимальном расстоянии ниже уровня чашеобразного элемента. Благодаря этому трубчатый элемент свисает с чашеобразного элемента под таким углом, чтобы не прикладывать боковое усилие к чашеобразному элементу.
Согласно варианту настоящего изобретения управляющее устройство выполнено с возможностью непрерывно получать информацию от детекторного средства о положении животного во время крепления чашеобразного элемента к соску для по существу непрерывного определения подходящей высвобождаемой длины трубчатого элемента и для управления механизмом позиционирования так, чтобы он регулировал высвобождаемую длину трубчатого элемента до последней определенной высвобождаемой длины. Животное обычно может совершать по меньшей мере небольшие перемещения в доильном станке, когда к соску подсоединяется чашеобразный элемент. В этом случае, как только животное переместится в доильном станке, управляющее устройство способно определить (рассчитать) новую подходящую высвобождаемую длину трубчатого элемента. Затем механизм позиционирования регулирует длину вытянутого трубчатого элемента в соответствии с новой определенной величиной. В этом случае высвобождаемая длина трубчатого элемента будет непрерывно регулироваться до соответствующей величины на протяжении всего времени, когда чашеобразный элемент прикреплен к соску.
В соответствии с вариантом изобретения детекторные средства включают идентифицирующий датчик, выполненный с возможностью идентифицировать животное, а управляющее устройство выполнено с возможностью определения по меньшей мере одной координаты соска по хранящейся информации о конкретных животных. Когда животные находятся в стоячем положении, их соски находятся на разных уровнях над поверхностью земли. Посредством такой хранящейся информации о конкретных животных можно определить по меньшей мере вертикальную координату сосков идентифицированного животного в доильном станке. Такое детекторное средство может содержать средство позиционирования, выполненное с возможностью измерять по меньшей мере одну координату соска. Такое средство позиционирования может быть камерой или датчиком положения, выполненным с возможностью определения одной или более координат соска. Если, например, животное сдвигается, положение сосков меняется. Посредством такого средства позиционирования можно определять фактические координаты соска в течение всего времени, когда чашеобразный элемент прикреплен к соску. Если для крепления чашеобразного элемента к соску животного используется рука робота, можно также использовать координаты руки робота для определения координат соска, когда чашеобразный элемент подсоединяется к соску.
Согласно варианту настоящего изобретения механизм позиционирования может содержать расположенный стационарно направляющий элемент в магазине и подвижно расположенный направляющий элемент трубчатого элемента и приводное устройство, выполненное с возможностью смещать подвижный направляющий элемент в положения, находящиеся на разных расстояниях от стационарного направляющего элемента, когда высвобождаемую длину трубчатого элемента нужно изменить. Посредством таких направляющих элементов можно очень легко отрегулировать высвобождаемую длину трубчатого элемента. По меньшей мере подвижный направляющий элемент может содержать роликовый элемент, выполненный с возможностью поддержки верхней изогнутой части трубчатого элемента. За счет этого появляется возможность вытягивать трубчатый элемент, прилагая к нему относительно небольшое усилие.
Согласно варианту настоящего изобретения механизм позиционирования может быть выполнен с возможностью смещать подвижный направляющий элемент во множество различных заданных фиксированных положений, находящихся на разных расстояниях от стационарного поддерживающего элемента, когда нужно изменить высвобождаемую длину трубчатого элемента. В этом случае высвобождаемую длину трубчатого элемента можно менять соответствующими шагами. Альтернативно, механизм позиционирования может быть выполнен с возможностью смещать подвижный направляющий элемент бесступенчато в положения, находящиеся на разных расстояниях от стационарного направляющего элемента, когда необходимо изменить высвобождаемую длину трубчатого элемента. В этом случае высвобождаемую длину трубчатого элемента можно регулировать бесступенчато.
Согласно варианту настоящего изобретения приводное устройство содержит двигатель и трансмиссию, выполненные с возможностью смещать подвижный направляющий элемент по пути относительно стационарного направляющего элемента. Предпочтительно, двигатель является электродвигателем. Электродвигатель легко активировать и им легко управлять. Однако можно использовать и другие типы двигателей. Трансмиссия может содержать зубчатые колеса, выполненные с возможностью смещать подвижный направляющий элемент по пути, сформированному зубчатыми рейками. Посредством такой трансмиссии можно смещать подвижный направляющий элемент в разные положения относительно стационарного направляющего элемента быстро и с очень высокой точностью.
Согласно варианту настоящего изобретения управляющее устройство выполнено с возможностью принимать информацию от датчика, когда чашеобразный элемент нужно снять с соска, и с возможностью активировать механизм позиционирования так, чтобы он стянул чашеобразный элемент с соска, к которому он прикреплен, и перевел его в запаркованное положение в магазине. В этом случае механизм позиционирования также используется для отсоединения элемента в форме от соска. Поэтому нет необходимости использовать отдельное снимающее устройство, которое обычно содержит вакуумный цилиндр.
Согласно варианту настоящего изобретения чашеобразный элемент является доильным стаканом, применяемым в процессе доения. Трубчатые элементы в форме трубки молокопровода и трубки вакуум-провода соединены с доильным стаканом. Альтернативно, чашеобразный элемент может быть стаканом для мойки сосков («моющим» стаканом), который подсоединяют к соску во время процесса мойки соска. Стакан используется многократно, прежде чем начнется процесс дойки. Подсоединенный трубчатый элемент в этом случае может быть адаптирован к подаче моющей жидкости к соску и к отводу моющей жидкости от стакана для мойки сосков.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее следует более подробное описание примера предпочтительного варианта настоящего изобретения со ссылками на приложенные чертежи, где:
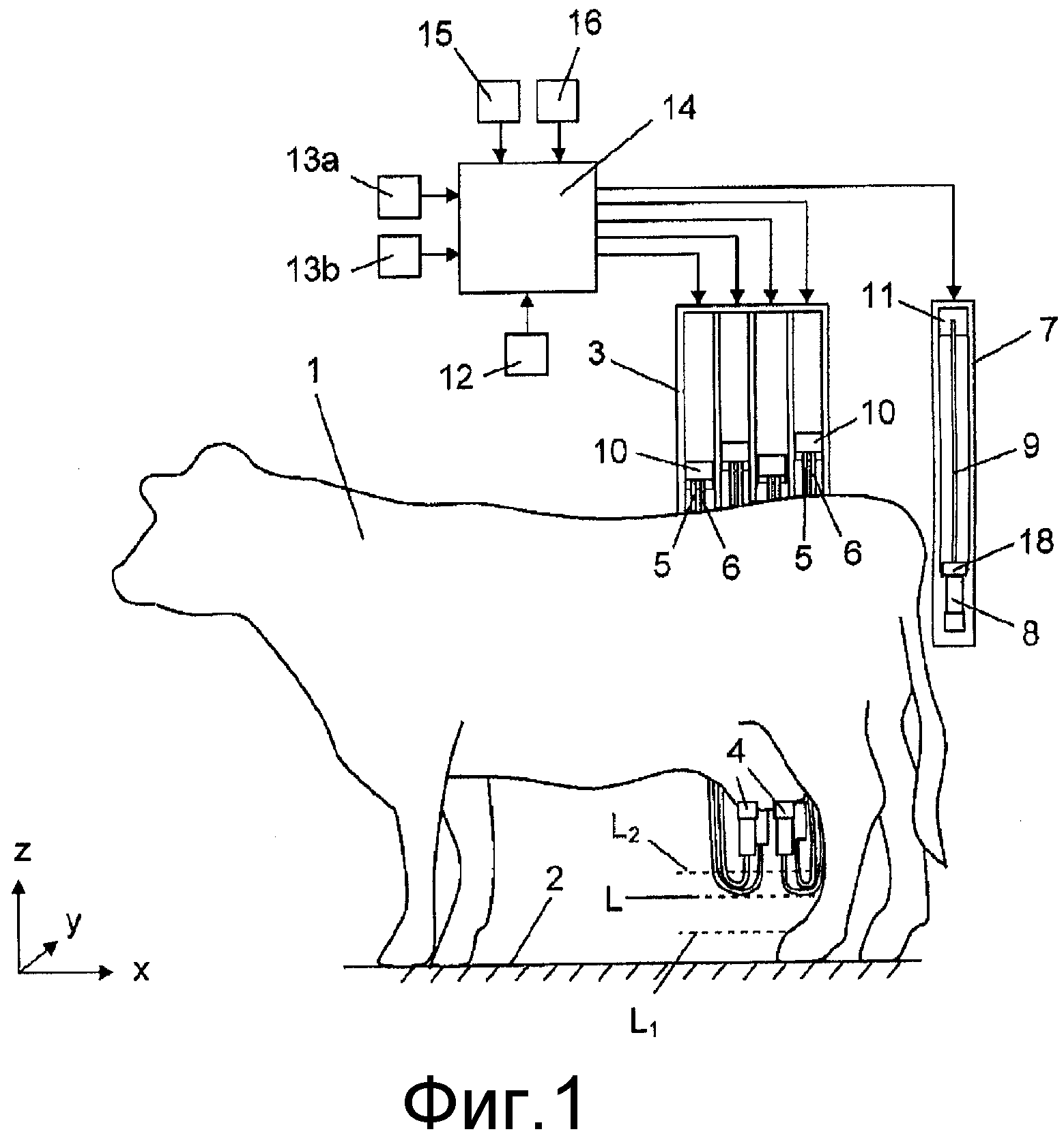
Фиг.1 - корова в процессе дойки и позиционирующая система по настоящему изобретению.
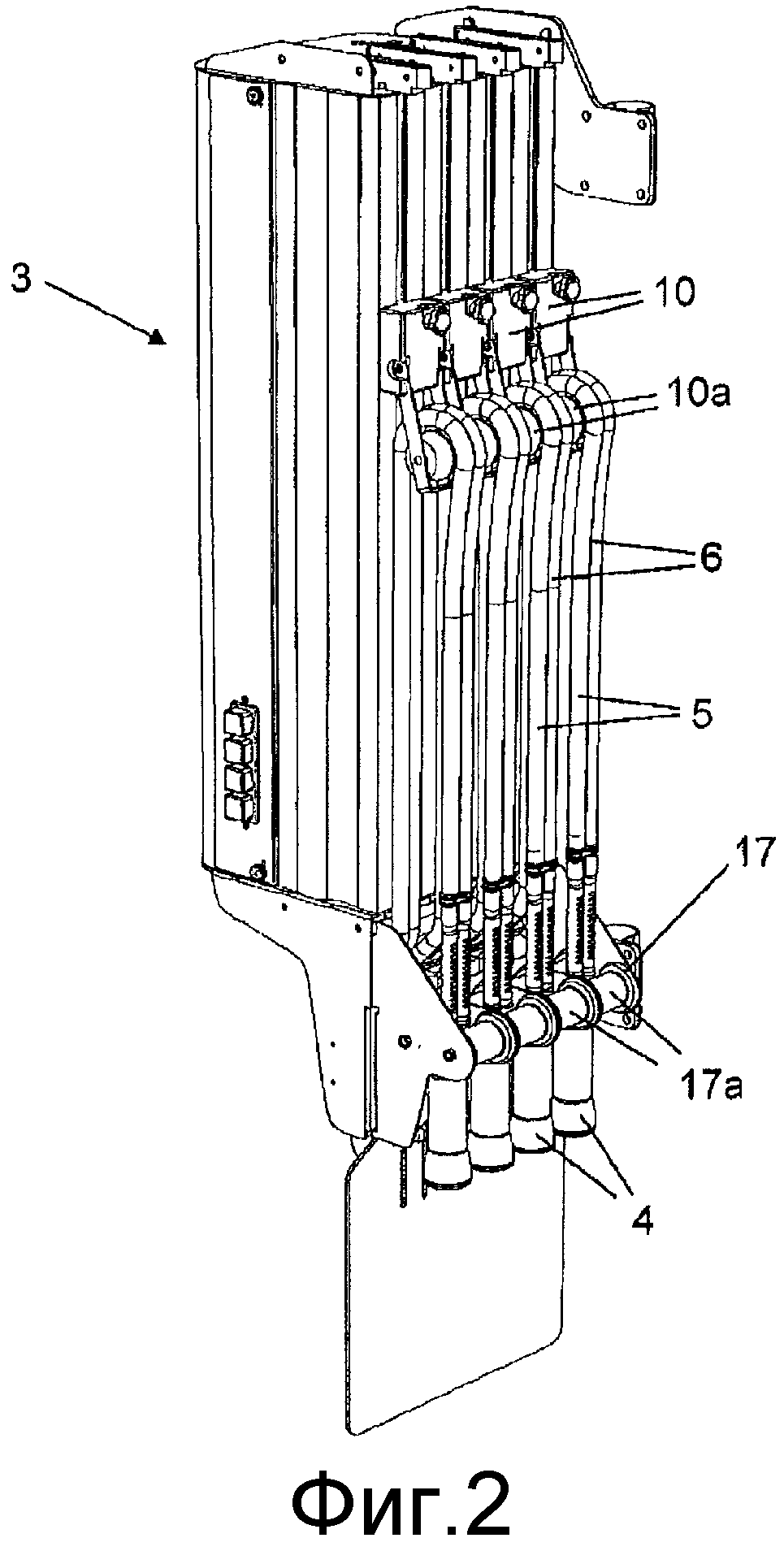
Фиг.2 - более детальный вид магазина доильных стаканов по фиг.1 и
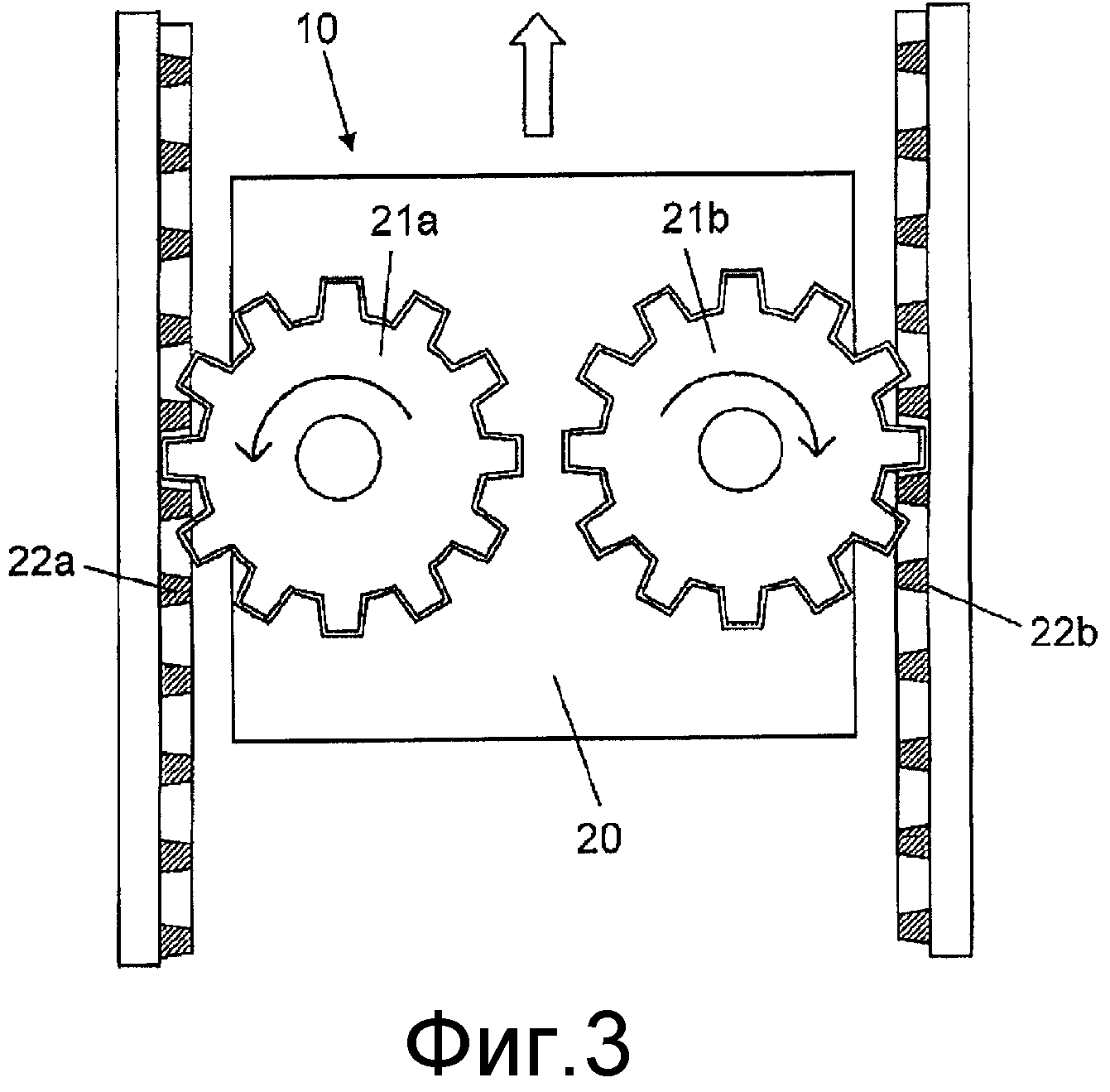
Фиг.3 - механизм трансмиссии подвижно установленного направляющего элемента трубок в магазине.
Подробное описание предпочтительного варианта осуществления изобретения
На фиг.1 показана корова 1, стоящая на поверхности 2 пола в доильном станке. Доильный станок содержит магазин 3 доильных стаканов с четырьмя доильными стаканами 4. Доильный станок также содержит магазин 7 со стаканом 8 для мойки сосков. Стакан 8 для мойки сосков соединен с трубчатым элементом 9. Предпочтительно, доильные стаканы 4 и стакан 8 для мойки сосков прикрепляются к соскам коровы 1 непоказанной рукой робота. До начала процесса доения в доильном станке соски коровы 1 необходимо обмыть. Рука робота извлекает стакан 8 для мойки сосков из запаркованного положения в магазине 7 и перемещает его к соответствующим соскам коровы 1 в заданном порядке. Когда процесс мойки сосков завершен, стакан 8 втягивается в запаркованное положение в магазине 7. Затем рука робота вытягивает доильные стаканы 4 из их соответствующих запаркованных положений в магазине 3 доильных стаканов и подсоединяет их к соскам коровы 1. Процесс доения начинается, когда все четыре доильных стакана 4 будут прикреплены к соскам коровы 1. Когда процесс доения заканчивается, доильные стаканы 4 индивидуально втягиваются в запаркованное положение в магазине 3 доильных стаканов соответствующим механизмом позиционирования.
Таким образом, магазин 3 доильных стаканов содержит механизм позиционирования для каждого доильного стакана 4. Каждый механизм позиционирования содержит подвижно установленный направляющий элемент 10, выполненный с возможностью направлять верхнюю изогнутую концевую часть трубки 5 молокопровода и трубки 6 вакуум-провода в магазине 3. Направляющий элемент 10 выполнен с возможностью перемещения в вертикальном направлении в магазине 3 доильных стаканов. Высвобождаемая длина трубки 5 молокопровода и трубки 6 вакуум-провода определяется вертикальным положением направляющего элемента 10. Механизмы позиционирования имеют конструкцию, позволяющую вытягивать доильный стакан 4 и соединенные с ним трубку 5 молокопровода и трубку 6 вакуум-провода из запаркованного положения в магазине 3 в положение крепления к соску коровы 1 с помощью руки робота.
Магазин 7 содержит соответствующий механизм позиционирования стакана 8 для мойки сосков. Этот механизм позиционирования содержит подвижно расположенный направляющий элемент 11, выполненный с возможностью определять верхний изогнутый концевой участок трубчатого элемента 9 в магазине 7. Направляющий элемент 11 выполнен с возможностью перемещения в вертикальном направлении в магазине 7. Стационарно расположенный направляющий элемент 18 определяет запаркованное положение стакана 8 в магазине 7. На фиг.1 показан стакан 8 для мойки сосков и соединенный с ним трубчатый элемент 9 в запаркованном положении в магазине 7. Высвобождаемая длина трубчатого элемента 9 определяется вертикальным положением направляющего элемента 11.
Важно, чтобы трубки 5, 6 не вытягивались на слишком большую длину так, чтобы части трубок 5, 6 не лежали на поверхности пола доильного станка, когда доильные стаканы 4 прикреплены к соскам коровы 1. Иначе возникнет риск того, что корова 1 наступит на трубку 5 молокопровода или трубку 6 вакуум-провода и заблокирует поток в этих трубках 5, 6 во время процесса доения. Также может возникнуть риск того, что корова 1 зацепит трубки 5, 6 так, что доильный стакан 4 отсоединится от соска. В обоих случаях корова будет выдоена не полностью. С другой стороны, важно, чтобы трубка 5 молокопровода и трубка 6 вакуум-провода не были вытянуты на слишком короткую длину. В этом случае трубка 5 молокопровода и трубка 6 вакуум-провода будут прикладывать к доильному стакану силу, направленную вбок, что вызывает риск нарушения процесса доения и возможность того, что доильный стакан 4 отсоединится от соска. Поэтому важно, чтобы трубка 5 молокопровода и трубка 6 вакуум-провода вытягивались на подходящую длину, когда доильные стаканы 4 прикреплены к соскам коровы 1.
Доильный станок содержит систему позиционирования для управления высвобождаемой длиной трубок 5, 6, когда доильные стаканы 4 прикреплены к соскам коровы 1 в доильном станке. Система позиционирования содержит управляющее устройство 14, которое выполнено для определения индивидуально адаптированной высвобождаемой длины трубок 5, 6 в ответ на информацию от средств 12, 13а, 13b датчиков, выполненных с возможностью определять параметр, позволяющий рассчитывать положение соска животного 1. Управляющее устройство 14 также выполнено с возможностью управлять механизмом позиционирования так, чтобы он регулировал высвобождаемую длину трубок 5, 6 до определенной индивидуально адаптированной высвобождаемой длины.
В этом случае детекторное средство содержит датчик 12 идентификации, выполненный с возможностью идентифицировать корову 1, которую нужно выдоить в доильном станке. Детекторное средство далее содержит датчик 13а положения соска, выполненный с возможностью определять координаты x, y, z сосков коровы 1 в доильном станке. Датчиком 13а положения соска может быть камера, расположенная на руке робота, который подсоединяет доильные стаканы к соскам коровы 1. С помощью такого датчика положения соска можно определять координаты x, y, z сосков коровы до и во время крепления доильных стаканов к соскам коровы 1. Кроме того, детекторное средство содержит датчик 13b положения коровы. Датчик 13b положения коровы определяет положение коровы 1 в доильном станке. Такой датчик 13b положения коровы определяет положение коровы 1 в доильном станке и, таким образом, координаты x, y сосков в горизонтальной плоскости.
Перед началом процесса доения датчик 12 идентификации идентифицирует корову в доильном станке. Управляющее устройство 14 получает информацию от датчика 12 идентификации о "личности" коровы 1. Управляющее устройство 14 имеет доступ к информации, хранящейся в базе данных, о координатах x0, y0, z0 сосков индивидуальных коров 1, когда они находятся в заданном положении в доильном станке. Вертикальная координата z сосков постоянна, но горизонтальные координаты x, y сосков изменяются вместе с положением коровы в доильном станке. Датчик 13b положения коровы определяет положение коровы 1 в доильном станке. С помощью этих хранящихся в памяти координат x0, y0, z0 сосков и положения коровы 1 в доильном станке управляющее устройство 14 может выполнить определение координат x, y, z сосков в доильном станке. Такое определение координат является довольно грубым.
Управляющее устройство 14 определяет подходящую высвобождаемую длину соответствующих трубок 5, 6 с помощью определенных координат x, y, z. Управляющее устройство 14 управляет рукой робота так, что она захватывает и перемещает доильный стакан 4 в заданное положение относительно соска коровы 1, используя определенные координаты x, y, z. Когда доильный стакан 4 находится в этом положении, управляющее устройство 14 принимает более точную информацию о координатах x, y, z от камеры 13а на руке робота. С помощью этой информации управляющее устройство рассчитывает отрегулированную высвобождаемую длину трубок 5, 6, соединенных с доильным стаканом 4. Когда рука робота подсоединит все четыре доильных стакана к соответствующим соскам коровы 1, начинается процесс доения. Во время всего процесса доения управляющее устройство 14 по существу непрерывно получает информацию от датчика 13b положения коровы о положении коровы 1 в доильном станке. Когда корова 1 совершает движение в доильном станке, оно обнаруживается датчиком 13b положения коровы. Управляющее устройство 14 получает информацию от датчика 13b положения коровы о новом положении коровы в доильном станке. Управляющее устройство 14 рассчитывает новые величины высвобождаемой длины трубок 5, 6 и управляет механизмом позиционирования так, что он регулирует высвобождаемую длину трубок 5, 6 в соответствии с последними определенными величинами этой высвобождаемой длины.
Согласно альтернативному варианту настоящего изобретения, идентифицирующий датчик 12 отсутствует. В этом случае управляющее устройство 14 активирует руку робота так, чтобы она переместилась в положение, находящееся рядом с сосками коровы 1. Камера 13а на руке робота определяет координаты сосков. Одновременно датчик 13b положения коровы определяет положение коровы 1 в доильном станке. Управляющее устройство 14 вводит в память информацию о координатах x, y, z сосков, когда корова 1 находится в обнаруженном положении в доильном станке. Управляющее устройство с помощью координат x, y, z сосков рассчитывает подходящую высвобождаемую длину трубок 5, 6, и рука робота подсоединяет доильные стаканы 4 к соскам коровы 1. Управляющее устройство 14 по существу непрерывно получает информацию от датчика 13b положения коровы о положении коровы 1 в доильном станке. Как только корова совершает движение в доильном станке, управляющее устройство 14 рассчитывает новые величины высвобождаемой длины трубок 5, 6 и управляет механизмом позиционирования так, что он регулирует длины трубок 5, 6 в соответствии с последними определенными высвобождаемыми длинами.
Зная координаты x, y, z сосков коровы 1 и координаты запаркованного положения доильного стакана в магазине 3, можно определить концевые положения вытянутых трубок 5, 6, когда доильный стакан прикреплен к соску коровы 1. Когда доильный стакан прикреплен к соску, гибкие трубки 5, 6 проходят по изогнутому вниз пути между концевыми положениями. Положение самой нижней части трубок 5, 6 определено высвобождаемой длиной трубок 5, 6. При определенной высвобождаемой длине трубок 5, 6 самая нижняя часть трубок 5, 6 находится на самом низком допустимом уровне L1 или выше над поверхностью 2 пола в доильном станке. Механизм позиционирования выполнен с возможностью управлять движением вытягивания трубок 5, 6 так, чтобы они на вытягивались на длину, большую, чем определенная высвобождаемая длина трубок 5, 6. Самый низкий допустимый уровень L1 над поверхностью 2 пола является величиной, при которой риск того, что корова наступит или зацепит трубки 5, 6, по существу отсутствует. Самый низкий допустимый уровень L1 над поверхностью 2 пола может быть равен, например, 10 см над поверхностью 2 пола. Кроме того, эта определенная высвобождаемая длина трубки 5 молокопровода и трубки 6 вакуум-провода не должна быть слишком мала, когда доильный стакан прикреплен к соску. При определенной высвобождаемой длине трубок 5, 6 самая нижняя часть трубок 5, 6 расположена по меньшей мере на уровне L2, находящемся на минимальном расстоянии под доильным стаканом 4 так, что трубки 5, 6 не прилагают направленную вбок силу к доильному стакану 4, когда он прикреплен к соску. Уровень L2 может, например, находиться на 10 см ниже доильного стакана 4.
Предпочтительно, управляющее устройство 14 выполнено с возможностью определения подходящей высвобождаемой длины трубок 5, 6, при которой нижняя часть трубок 5, 6 расположена на уровне L, находящемся на расстоянии над уровнем L1 и на расстоянии ниже уровня L2. Определенная высвобождаемая длина трубок 5, 6 может иметь такую величину, чтобы самая нижняя часть трубок 5, 6 была расположена на уровне L, по существу посередине между уровнями L1 и L2. Если соски коровы расположены очень низко, требуемый уровень L1 для этой коровы может находиться выше, чем требуемый уровень L2. В таком случае система позиционирования находит оптимальный уровень L, который обеспечивает, что трубки 5, 6 не будут прикладывать слишком большую направленную вбок силу к доильному стакану 4, в то же время удерживая риск того, что корова наступит или зацепит трубки 5, 6, на достаточно низком уровне. Система позиционирования может выполнить эту задачу, используя второй набор уровней для L1 и L2, если первый набор не работает.
Управляющее устройство 14 по существу непрерывно получает информацию от, например, датчика 13b положения коровы о фактическом положении коровы 1 в течение всего времени, когда доильный стакан прикреплен к соску.1 Управляющее устройство по существу непрерывно определяет фактическую подходящую величину высвобождаемой длины трубок 5, 6 так, чтобы самая нижняя часть трубок 5, 6 находилась на уровне L между уровнями L1 и L2. В этом случае высвобождаемая длина трубок 5, 6 регулируется, как только корова 1 сдвинется в доильном станке в процессе доения. Трубки 5, 6 четырех доильных стаканов 4 могут регулироваться индивидуально так, чтобы самая нижняя часть всех трубок 5, 6 во время доения располагалась по существу на одном уровне L.
В процессе прикрепления доильного стакана к соску механизм позиционирования может быть выполнен с возможностью управлять вытягиванием трубки 5 молокопровода и трубки 6 вакуум-провода, когда доильный стакан 4 перемещается из запаркованного положения к положению крепления на соске так, чтобы трубка 5 молокопровода и трубка 6 вакуум-провода не вытягивались на длину, большую, чем определенная высвобождаемая длина. В этом случае, если трубка 5 молокопровода и трубка 6 вакуум-провода были вытянуты на определенную длину до того, как доильный стакан был прикреплен к соску, механизм позиционирования выполнен с возможностью блокировать дальнейшее вытягивание трубки 5 молокопровода и трубки 6 вакуум-провода.
Во время альтернативного процесса крепления доильного стакана к соску механизм позиционирования не выполнен с возможностью управлять вытягиванием трубки 5 молокопровода и трубки 6 вакуум-провода, когда доильный стакан перемещается из запаркованного положения в положение крепления к соску, но вместо этого механизм позиционирования выполнен с возможностью регулирования высвобождаемой длины трубки 5 молокопровода и трубки 6 вакуум-провода до определенной высвобождаемой длины, сразу или через короткое время после того, как доильный стакан будет прикреплен к соску. В этом случае механизм позиционирования начинает регулировать высвобождаемую длину трубки 5 молокопровода и трубки 6 вакуум-провода, когда доильный стакан прикреплен к соску. В этом случае трубку 5 молокопровода и трубку 6 вакуум-провода во время процесса крепления можно вытягивать на длину, большую, чем определенная высвобождаемая длина.
Во время доения расходомер 15 молока измеряет расход молока в каждой трубке 5 молокопровода доильных стаканов 4. Когда расход молока в трубке 5 молокопровода падает ниже заданного уровня, управляющее устройство 14 принимает решение об окончании процесса доения. Управляющее устройство 14 активирует механизм позиционирования так, что он смещает соответствующий направляющий элемент 11 в верхнее конечное положение в магазине 3 доильных стаканов. Тем самым доильный стакан 4 удаляется из положения крепления на соске и перемещается в запаркованное положение в магазине 3.
Механизм позиционирования магазина 7 выполнен с возможностью управлять высвобождаемой длиной трубчатого элемента 9, когда стакан 8 моет соски коровы 1 таким же способом, что и магазин 3 доильных стаканов. Тем самым самая нижняя часть трубчатого элемента 9 будет расположена на соответствующем уровне L над поверхностью 2 пола, во время процесса обмывания сосков, как и трубки 5, 6 во время процесса доения. В этом случае управляющее устройство 14 получает информацию от датчика 16 об окончании процесса обмывания сосков. Датчик 16 может получать информацию от руки робота, когда все соски коровы 1 будут промыты. После того как все соски коровы 1 помыты, управляющее устройство 14 активирует механизм позиционирования так, что он перемещает стакан 8 в запаркованное положение в магазине 7.
На фиг.2 более детально показан магазин 3 доильных стаканов. Каждый механизм позиционирования в магазине 3 доильных стаканов содержит стационарно расположенный направляющий элемент 17, определяющий запаркованное положение доильного стакана 4. Стационарный направляющий элемент 17 содержит роликовый элемент 17а. Запаркованные положения доильных стаканов 4 расположены в ряд в нижнем конечном участке магазина 3. Расположенный подвижно направляющий элемент 10 трубки 5 молокопровода и трубки 6 вакуум-провода также содержит роликовый элемент 10а. Трубка 5 молокопровода и трубка 6 вакуум-провода проходят вверх от нижней части магазина 3 до роликового элемента 10а подвижно установленного направляющего элемента 10. Роликовый элемент 10а определяет наивысшее положение трубки 5 молокопровода и трубки 6 вакуум-провода в магазине 3 доильных стаканов. Трубка 5 молокопровода и трубка 6 вакуум-провода проходят вниз от роликового элемента 10а до роликового элемента 17а стационарного направляющего элемента в магазине 3. Когда подвижный направляющий элемент 10 находится в верхнем конечном положении в магазине 3, соответствующий доильный стакан 4 находится в запаркованном положении. Когда подвижный направляющий элемент 10 смещается в более низкое положение в магазине 3, трубка 5 молокопровода и трубка 6 вакуум-провода вытягиваются на длину, соответствующую вертикальному положению подвижного направляющего элемента 10.
На фиг.3 показано сечение одного из подвижно установленных направляющих элементов 10 в магазине 3 доильных стаканов. Подвижно расположенный направляющий элемент 10 содержит электродвигатель 20 и трансмиссию, содержащую два зубчатых колеса 21а и 21b. Трансмиссия имеет конструкцию, преобразующую вращение вала электродвигателя во вращение двух зубчатых колес 21а, 21b. Зубчатые колеса 21а, 21b вращаются с одинаковой частотой, но в разных направлениях. Зубчатые колеса 21а, 21b заходят в зацеплении с соответствующими зубчатыми рейками 22а, 22b, каждая из которых проходит в магазине 3 вертикально. Электродвигатель 20 управляется управляющим устройством 14. В этом случае электродвигатель 20 перемещает зубчатые колеса 21а, 21b так, что подвижно расположенный элемент 10 смещается вверх или вниз в магазине 3. В этом случае можно изменять расстояние между подвижным направляющим элементом 10 и стационарным направляющим элементом 17 бесступенчато. Поэтому имеется возможность регулировать высвобождаемую длину трубок 5 и 6 бесступенчато.
Настоящее изобретение не ограничивается описанными вариантами и может быть изменено и модифицировано в объеме прилагаемой формулы изобретения.
Стойло, устройство в стойле и способ монтажа указанного устройства
Щетка для домашнего скота, устройство, содержащее щетку данного типа, и способ обработки щеткой домашнего скота
Устройство для ухода
Вращающийся зал для доения животных
Схема и способ обнаружения
Доильный зал и способ его работы
Установка для автоматической мойки доильных стаканов роторной доильной платформы
Промывочная система для устройства очистки сосков
Хлорированное щелочное моющее средство трубопровода с метансульфокислотой
Устройство и способ определения количественного показателя состояния тела животного
Стойло, устройство в стойле и способ монтажа указанного устройства
Щетка для домашнего скота, устройство, содержащее щетку данного типа, и способ обработки щеткой домашнего скота
Устройство для ухода
Вращающийся зал для доения животных
Схема и способ обнаружения
Доильный зал и способ его работы
Установка для автоматической мойки доильных стаканов роторной доильной платформы
Промывочная система для устройства очистки сосков
Хлорированное щелочное моющее средство трубопровода с метансульфокислотой
Устройство и способ определения количественного показателя состояния тела животного

