Результат интеллектуальной деятельности: ДОИЛЬНЫЙ ЗАЛ И СПОСОБ ЕГО РАБОТЫ
Вид РИД
Изобретение
Настоящее изобретение относится к доильному залу и способу его работы и, конкретно, но не исключительно, к вращающемуся доильному залу для доения таких животных, как коровы, и к способу его работы.
Существуют различные типы доильного зала, известные в молочной промышленности, и настоящее изобретение, в частности, касается так называемого вращающегося доильного зала. Этот тип доильного зала снабжен сравнительно большим количеством доильных боксов, расположенных с круговой конфигурацией на вращающейся кольцевой платформе, и особенно пригоден для обращения с большим количеством животных. Платформа вращается с относительно низкой постоянной скоростью таким образом, что корова может легко становиться на платформу из стационарной накопительной секции и тем самым получать доступ к боксу. Если оператор считает необходимым, вращательное движение платформы может быть моментально остановлено для обеспечения достаточного времени корове для входа (или выхода) на платформу. Дальнейшее вращение платформы затем перемещает бокс в положение, где оператор может выполнять определенные задачи (такие как очистка сосков и размещение доильных стаканов на сосках), чтобы начать процесс доения. Скорость вращения является такой, чтобы процесс доения завершался к моменту, когда бокс переместится от места входа коровы (где корова встает на платформу) к месту выхода коровы (где корова покидает платформу). Места входа и выхода коровы расположены рядом, чтобы максимально увеличить период времени, в течение которого корова находится в доильном боксе.
Следует понимать, что коровы могут непрерывно входить и выходить из вращающегося доильного зала без обязательной остановки вращения платформы, что позволяет обслуживать множество коров. Также следует понимать, что перемещение платформы обеспечивает последовательную подачу коров оператору. Следовательно, оператор может оставаться на месте и непрерывно выполнять операции доения.
Существуют два основных типа системы вращающегося доильного зала, называемые параллельно-вращающейся системой и вращающейся системой типа "елочка".
Во вращающейся системе типа "елочка", корова стоит в боксе, направленном по диагонали к внешней стороне кольцевой вращающейся платформы, обычно в направлении вращения. Один или более операторов стоят на внутренней стороне вращающейся платформы и имеют хороший доступ к боку каждой коровы. Доильное оборудование расположено вдоль каждой коровы на внутреннем крае платформы.
В параллельно-вращающейся системе, корова стоит в боксе вращающейся платформы так, что она обращена (головой) радиально внутрь к центру вращения платформы. Оператор, стоящий снаружи вращающейся платформы, в этом случае может работать с задней стороны каждой коровы, когда очередная корова перемещается мимо. Так как коровы располагаются параллельно, параллельно-вращающаяся система позволяет разместить больше коров в одном и том же пространстве.
В каждом из этих типов вращающегося доильного зала, каждый доильный бокс снабжен комплектом из четырех доильных стаканов. Доильные стаканы прикрепляют к соскам коровы, расположенной в боксе, так, чтобы обеспечить возможность доения указанной коровы. Как только процесс доения завершен, автоматическая система удаления одновременно снимает четыре доильных стакана с сосков. Такая система содержит трос, который прикреплен к комплекту доильных стаканов и который отводится автоматически в соответствующий момент для удаления комплекта доильных стаканов с коровы.
Проблема, связанная с вращающимися доильными залами, заключается в том, что оператор имеет только ограниченное количество времени для обслуживания каждого доильного бокса, после которого доильный бокс переместится за пределы досягаемости оператора. Оператор может обслуживать доильный бокс разными способами, например, оператор обычно обслуживает доильный бокс посредством перемещения доильных стаканов из положения хранения в положение прикрепления к соскам коровы, стоящей в доильном боксе. Хотя комплект доильных стаканов должен быть прикреплен к соскам коровы до того, как доильный бокс переместится на значительное расстояние, возникают непредсказуемые ситуации, например, как движения беспокойной коровы, которые могут значительно увеличить период прикрепления доильных стаканов. Это необязательно создает проблему, когда доильные боксы обслуживаются человеком-оператором, так как оператор может перемещаться вместе с вращающейся платформой и оставаться в конкретном боксе, в котором возникла задержка. Однако задержки при обслуживании бокса могут создавать серьезные проблемы, когда для обслуживания боксов используют роботы-манипуляторы. Поскольку робот-манипулятор имеет фиксированное положение в доильном зале, доильный бокс может переместиться слишком быстро за пределы его досягаемости. Эта проблема особенно неприятна, когда скорость вращения доильных боксов является сравнительно высокой. С этой проблемой можно столкнуться в больших вращающихся доильных залах, в которых линейная тангенциальная скорость бокса будет сравнительно высокой для обеспечения заданной угловой скорости, вследствие сравнительно большого радиуса платформы.
Первый аспект настоящего изобретения обеспечивает доильный зал, содержащий, по меньшей мере, первый и второй роботы-манипуляторы и множество доильных боксов, обеспеченных на платформе, перемещаемой относительно роботов-манипуляторов; в котором, по меньшей мере, первый и второй роботы-манипуляторы расположены так, что они способны одновременно обслуживать соседние доильные боксы на платформе; при этом доильный зал отличается тем, что каждый из, по меньшей мере, первого и второго роботов-манипуляторов выполнен с возможностью прикрепления, к одному животному в доильном боксе, подмножества из общего требуемого количества доильных стаканов, подлежащих прикреплению к соскам указанного животного в доильном боксе.
Роботы-манипуляторы тем самым прикрепляют заданное количество от общего требуемого количества доильных стаканов. Соответственно, следует понимать, что любое конкретное животное имеет доильные стаканы, прикрепленные к его соскам посредством, по меньшей мере, двух роботов-манипуляторов.
Доильные стаканы могут использоваться для очистки сосков животного или для доения животного. Соответственно, устройства могут использоваться или только для очистки, или только для доения, или для комбинации того и другого. Например, первая пара роботов-манипуляторов может быть предназначена для очистки сосков животного посредством прикрепления и снятия очищающих стаканов, а вторая пара роботов-манипуляторов может использоваться для прикрепления доильных стаканов для доения. Разные комбинации и операции также являются возможными.
Благодаря требованию для каждого робота-манипулятора прикреплять только подмножество из общего требуемого количества доильных стаканов, время, требующееся каждому роботу-манипулятору для обслуживания доильного бокса, уменьшено. Преимущество является наиболее значительным, если один робот-манипулятор обеспечен на каждую операцию для каждого соска животного, но преимущества также обеспечиваются, если, например, обеспечен один робот-манипулятор на каждую пару сосков.
Предшествующие системы стремились решить вышеприведенную проблему задержек в обслуживании бокса посредством обеспечения пары роботов-манипуляторов, каждое из которых прикрепляет все необходимые доильные стаканы к животному. При использовании, роботы-манипуляторы таких систем по предшествующему уровню техники одновременно обслуживают соседние боксы. Это приводит к пересечению роботов-манипуляторов, когда один робот-манипулятор, завершивший свою работу по обслуживанию, должен вернуться назад мимо дополнительного робота-манипулятора, который может продолжать обслуживать соседний бокс. Для предотвращения столкновения двух роботов-манипуляторов, требуются сложные выдвигаемые роботы-манипуляторы с несколькими осями движения и сложные системы управления.
В настоящем изобретении, первый робот-манипулятор может содержать средство поддерживания доильного стакана и средство обнаружения расположения соска относительно указанного средства переноса доильных стаканов, и второй робот-манипулятор может содержать второе средство поддерживания доильного стакана и средство обнаружения расположения соска относительно указанного второго средства переноса доильных стаканов, причем относительное положение указанного средства обнаружения первого робота-манипулятора относительно средства переноса доильных стаканов первого робота-манипулятора отличается от относительного положения указанного средства обнаружения второго робота-манипулятора относительно средства переноса доильных стаканов второго робота-манипулятора.
Средство обнаружения первого робота-манипулятора может быть предназначено для обнаружения в первом направлении относительно первого робота-манипулятора, а средство обнаружения второго робота-манипулятора может быть предназначено для обнаружения во втором направлении относительно второго робота-манипулятора, причем указанные первое и второе относительные направления являются противоположными друг другу.
В идеале, первый и второй роботы-манипуляторы расположены относительно платформы таким образом, что, при использовании, указанные устройства прикрепляют доильные стаканы к соскам животного с задней стороны указанного животного, и при этом, при использовании, средство обнаружения первого робота-манипулятора обнаруживает в направлении от указанного устройства в общем к передней стороне животного, а средство обнаружения второго робота-манипулятора обнаруживает в направлении от указанного устройства в общем к задней стороне животного.
Первый робот-манипулятор может приводиться в действие для прикрепления доильного стакана к, по меньшей мере, одному из задних сосков животного. Второй робот-манипулятор может приводиться в действие для прикрепления доильного стакана к, по меньшей мере, одному из передних сосков животного.
Также является предпочтительным, что средство обнаружения первого робота-манипулятора расположено на одной стороне средства переноса доильных стаканов первого робота-манипулятора и ориентировано таким образом, чтобы обнаруживать в общем направлении указанного средства переноса доильных стаканов, а средство обнаружения второго робота-манипулятора расположено на одной стороне средства переноса доильных стаканов второго робота-манипулятора и ориентировано таким образом, чтобы обнаруживать в общем направлении указанного средства переноса доильных стаканов второго робота-манипулятора, и причем указанная сторона первого средства переноса доильных стаканов является другой стороной относительно указанной стороны второго средства переноса доильных стаканов.
Доильный зал может содержать два указанных первых робота-манипулятора и два указанных вторых робота-манипулятора.
Более того, каждое средство обнаружения может содержать камеру.
В настоящем изобретении, один робот-манипулятор никогда не будет вынуждено возвращаться назад мимо дополнительного робота-манипулятора для обслуживания бокса. Боксы обслуживаются последовательно по мере их прохождения мимо каждого робота-манипулятора. По существу, случаи, когда два робота-манипулятора пересекаются друг с другом уменьшены до минимума. Это предпочтительно обеспечивает возможность использования значительно более простых роботов-манипуляторов, наряду с более простыми системами управления. Однако, по-прежнему является возможным использовать более сложные роботы-манипуляторы для обеспечения дополнительных преимуществ, как описано ниже.
Второй аспект настоящего изобретения обеспечивает способ работы доильного зала в соответствии с первым аспектом настоящего изобретения; при этом способ содержит этап управления множеством роботов-манипуляторов таким образом, что указанные устройства одновременно обслуживают разные соседние доильные боксы на платформе.
Доильный зал описывается ниже как содержащий четыре робота-манипулятора и множество доильных боксов; причем каждый робот-манипулятор выполнен с возможностью прикрепления одного доильного стакана к животному, подлежащему доению. Информация касательно работы робота-манипулятора посылается электронным образом от указанного устройства. Информация касательно одного из указанных роботов-манипуляторов может передаваться электронным образом на другое из указанных роботов-манипуляторов. В идеале, информация касательно работы указанных четырех роботов-манипуляторов может передаваться электронным образом между указанными устройствами. Более того, информация может содержать данные, записывающие текущее положение в реальном времени робота-манипулятора и/или количество доильных стаканов, успешно прикрепленных к корове, расположенной в доильном боксе, обслуживающемся в текущий момент роботом-манипулятором. В идеале, множество доильных боксов обеспечено на платформе, перемещаемой относительно роботов-манипуляторов.
Доильный зал описывается ниже как содержащий первый робот-манипулятор и множество доильных боксов, обеспеченных на платформе, перемещаемой относительно робота-манипулятора; и при этом доильный зал дополнительно содержит вход, предотвращающий, при использовании, вход на платформу более одного животного за один раз; и при этом доильный зал отличается наличием второго робота-манипулятора, причем первый и второй роботы-манипуляторы расположены так, что они способны одновременно обслуживать соседние доильные боксы на платформе.
Также ниже описывается способ работы доильного зала, имеющего множество роботов-манипуляторов, множество доильных боксов, обеспеченных на платформе, перемещаемой относительно роботов-манипуляторов, и вход, предотвращающий, при использовании, вход на платформу более одного животного за один раз; при этом способ содержит этап управления указанными роботами-манипуляторами таким образом, что указанные устройства одновременно обслуживают разные соседние доильные боксы на платформе.
Следует понимать, что посредством использования настоящего изобретения, робот-манипулятор будет требовать меньше времени для обслуживания доильного бокса. Также следует понимать, что настоящее изобретение тем самым обеспечивает возможность увеличения скорости вращения бокса платформы.
Дополнительные предпочтительные возможные признаки изобретения определены в прилагаемых зависимых пунктах формулы изобретения.
В одном варианте осуществления, информация касательно работы одного робота-манипулятора передается электронным образом на другой робот-манипулятор и может передаваться электронным образом между указанными двумя роботами-манипуляторами.
Вариант выполнения настоящего изобретения далее описан со ссылкой на прилагаемые чертежи, на которых:
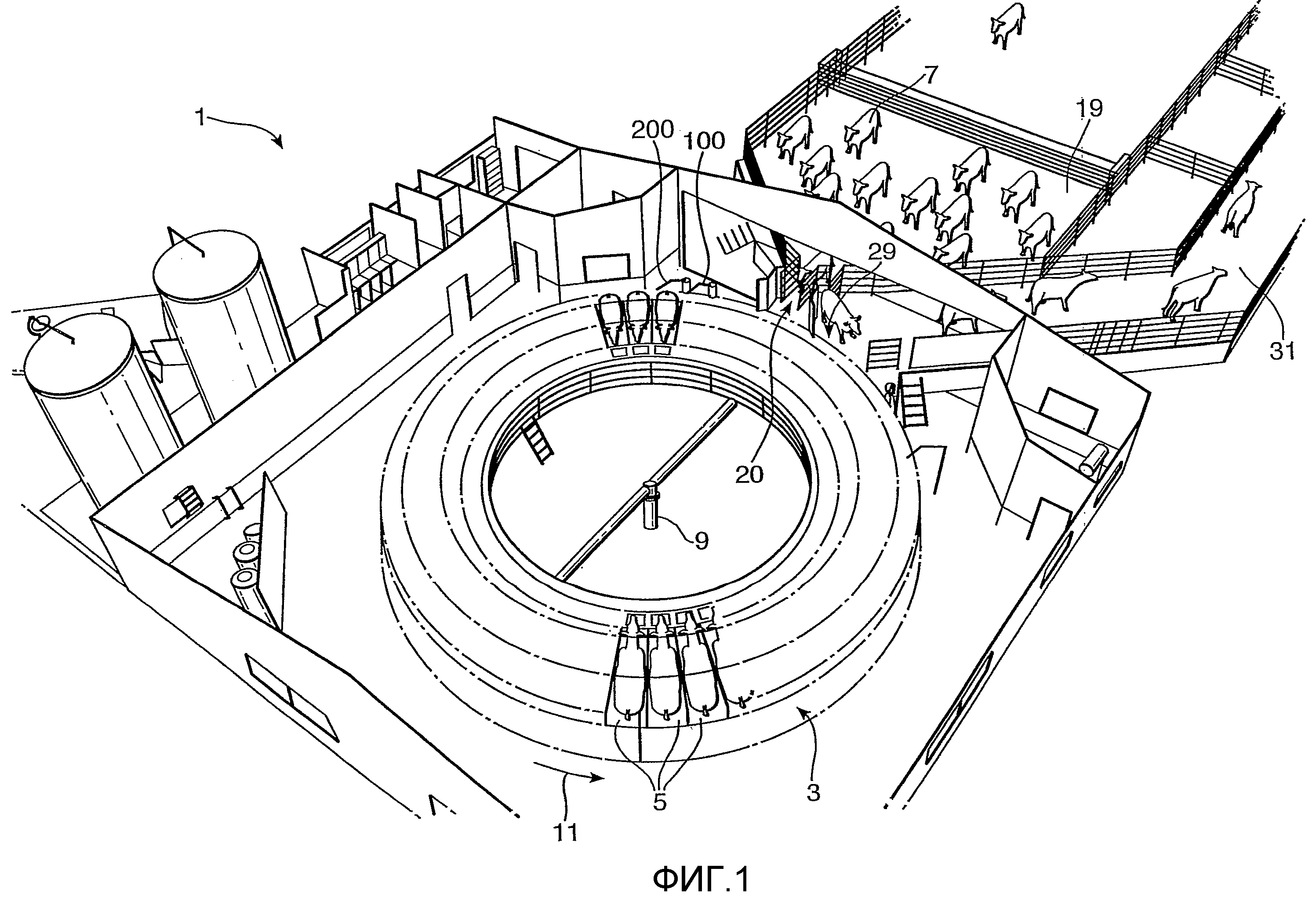
Фиг.1 - вид в перспективе параллельно-вращающегося доильного зала по изобретению;
Фиг.2 - схематичный частичный вид сверху платформы доильного зала по Фиг.1, показывающий один бокс платформы, расположенный рядом с роботом-манипулятором до прикрепления доильных стаканов к животному, и дополнительную часть платформы, где доильные стаканы уже прикреплены;
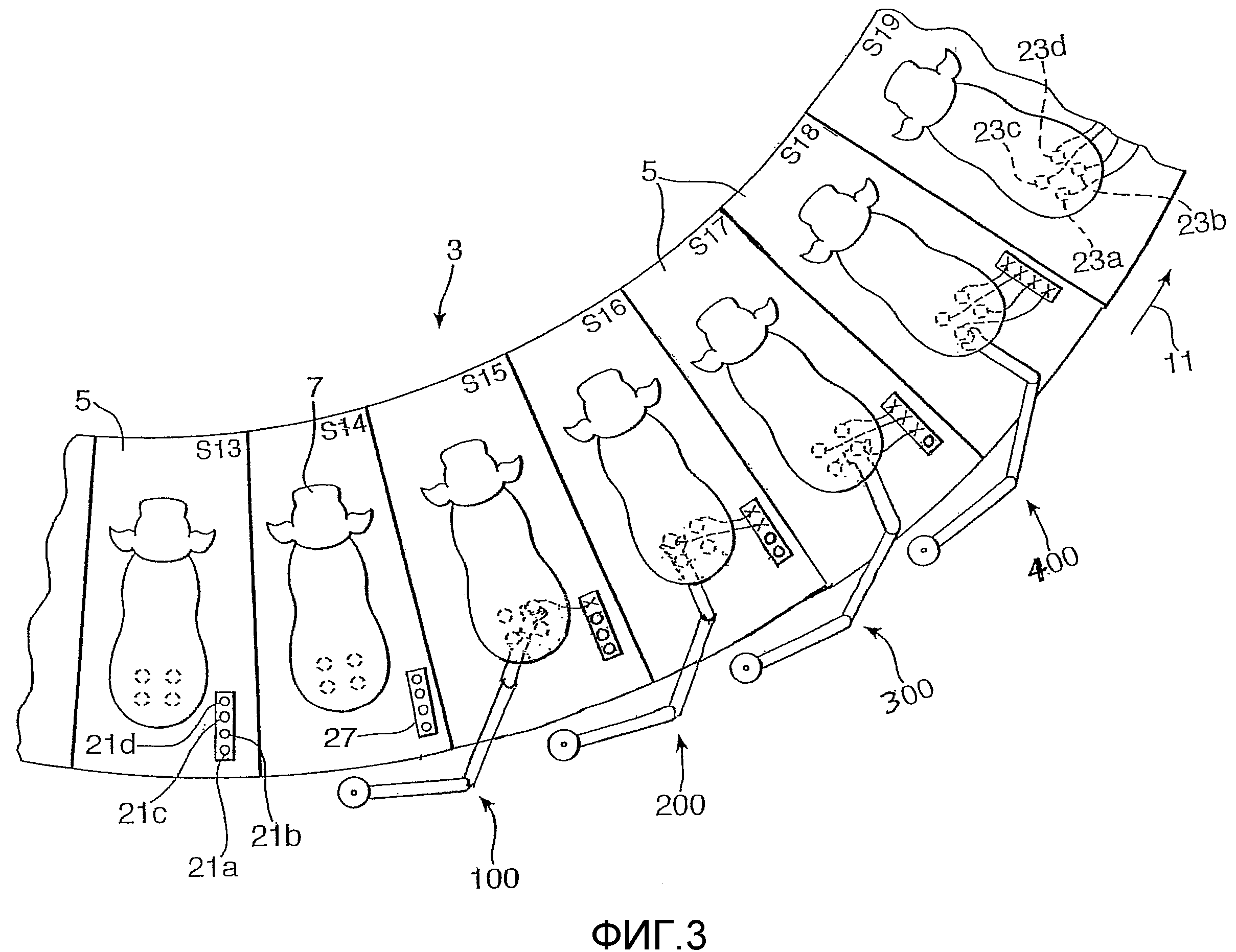
Фиг.3 - схематичный частичный вид сверху платформы доильного зала по Фиг.1 во время вращения, причем каждый из четырех роботов-манипуляторов выполняет свою собственную работу;
Фиг.4 - схематичный частичный вид сверху робота-манипулятора, снабженного направленной вперед камерой;
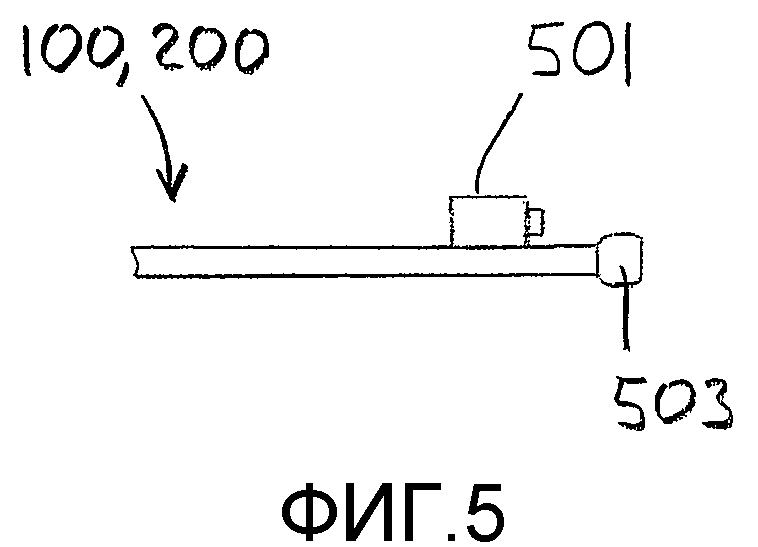
Фиг.5 - схематичный частичный вид сбоку робота-манипулятора по Фиг.4;
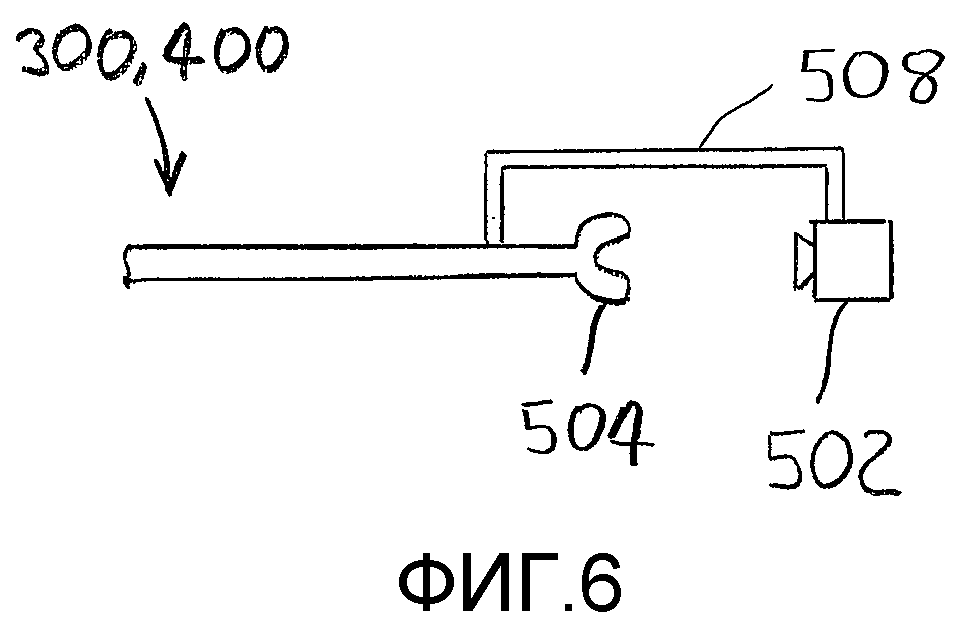
Фиг.6 - схематичный частичный вид сверху другого робота-манипулятора, снабженного направленной назад камерой; и
Фиг.7 - схематичный частичный вид сбоку робота-манипулятора по Фиг.6.
Параллельно-вращающийся доильный зал 1 по изобретению показан на Фиг.1 прилагаемых чертежей. Доильный зал 1 содержит вращающуюся платформу 3, имеющую кольцевую форму и обеспеченную пятьюдесятью доильными боксами 5, расположенными параллельно в окружном направлении вдоль платформы 3. Так как доильный зал 1 представляет собой доильный зал параллельно-вращающегося типа, боксы 5 расположены таким образом, что корова 7, подлежащая доению, стоит в боксе 5, обращенной радиально внутрь к центру 9 вращения платформы 3. При использовании, платформа 3 вращается с помощью подходящего приводного средства в направлении против часовой стрелки, как показано стрелкой 11.
Со ссылкой на Фиг.1, следует понимать, что коровы 7, подлежащие доению, собираются в накопительной секции 19 и проходят на платформу 3 друг за другом через точку 20 входа в бокс. Точка 20 входа содержит проход для животного, имеющий ширину, по существу, равную ширине доильного бокса 5. Эта ширина является достаточной для животного, такого как корова, для спокойного прохождения через проход и в бокс 5, но не является такой большой, чтобы пропустить двух животных бок о бок. Таким образом, животные предохранены от одновременного входа в боксы 5 платформы 3. Следует понимать, что скорость вращения платформы 3 является достаточно низкой, чтобы корова 7 могла встать на платформу 3 и войти в проходящий мимо бокс 5. Также следует понимать, что, как только корова 7 вошла в бокс 5, дальнейшее вращение платформы 3 закрывает бокс 5 для предотвращения обратного выхода коровы 7 из бокса 5. Каждый бокс 5 снабжен четырьмя доильными стаканами, соединенными с традиционной доильной системой посредством шлангов. Как будет объясняться более подробно ниже со ссылкой на Фиг.2 и 3, эти доильные стаканы 21a, 21b, 21c, 21d автоматически прикрепляются к соскам 23a, 23b, 23c, 23d коровы посредством четырех роботов-манипуляторов 100, 200, 300, 400, которые перемещаются посредством электронной системы управления. Как только доильные стаканы 21 прикреплены к соскам 23, корова 7 доится традиционным образом, тогда как платформа 3 продолжает вращаться. Как только доение закончено, доильные стаканы 21 снимаются с сосков 23 посредством автоматической системы отвода доильных стаканов (не показана), которая натягивает шланг 20, связанный с каждым доильным стаканом 21, и стягивает доильные стаканы 21 обратно в магазин 27 доильных стаканов.
Как показано на Фиг.2, каждый бокс 5 снабжен магазином 27 доильных стаканов, который содержит четыре углубления, в которых располагаются четыре доильных стакана 21, когда не используются. Каждый магазин 27 расположен рядом со входом связанного бокса 5 таким образом, чтобы чрезмерно не затруднять доступ коровы 7 к боксу 5, и чтобы быть расположенным рядом с задней частью коровы 7, стоящей в боксе. Следовательно, магазин 27 следует понимать удерживающим доильные стаканы 21 в известном положении хранения, которое является легко доступным для каждого робота-манипулятора 100, 200, 300, 400, и которое является достаточно близким к соскам 23 коровы 7 для обеспечения возможности легкого перемещения доильных стаканов 21 к соскам 23 из магазина 27.
Как только доильные стаканы 21 были отведены в магазин 27 доильных стаканов, доильный бокс 5, в котором расположена корова 7, затем вскоре переместится к точке 29 выхода из бокса (см. Фиг.1). В точке 29 выхода, бокс 5 располагается в открытой конфигурации, таким образом корова 7, расположенная в нем, может отступать назад из бокса 5 и покидать доильный зал 1 посредством выходного прохода 31.
Как упомянуто выше, вращающийся доильный зал 1 настоящего изобретения снабжен автоматизированной системой для прикрепления доильных стаканов 21 к соскам 23 коровы 7, подлежащей доению. Эта автоматизированная система содержит, по меньшей мере, две и предпочтительно четыре робота-манипулятора 100, 200, 300, 400 и электронную систему управления. Электронная система управления обеспечивает возможность координирования перемещения роботов-манипуляторов 100, 200, 300, 400 с вращательным движением платформы 3. Подходящее средство мониторинга скорости вращения и положения и направления вращения платформы 3 обеспечено (не показано), и эта информация используется системой управления для обеспечения точности в координировании перемещений между роботами-манипуляторами 100, 200, 300, 400 и связанными боксами 5.
На Фиг.2 и 3 прилагаемых чертежей, некоторое количество доильных боксов (под номерами S13-S23) показано перемещающимся мимо роботов-манипуляторов 100, 200, 300, 400. Альтернативные расположения робота-манипулятора могут быть обеспечены, и схематичный пример, показанный на Фиг.2 и 3, обеспечен только для целей иллюстрации работы настоящего изобретения.
Ссылаясь конкретно на Фиг.2, первый робот-манипулятор 100 готов к началу обслуживания в боксе S15. На Фиг.2 также показано несколько боксов (под номерами S21-S23) с части платформы 3, которая уже перемещена дальше всех четырех роботов-манипуляторов 100, 200, 300, 400, и таким образом, где доильные стаканы 21a, 21b, 21c, 21d прикреплены к соскам 23a, 23b, 23c, 23d коровы 7. Шланг 20, связанный с каждым доильным стаканом 21, также ясно показан в боксах под номерами S21, S22 и S23. Только один робот-манипулятор показан на Фиг.2 из соображений простоты. Однако следует понимать, что элементы, указанные на Фиг.2, относительно первого робота-манипулятора, также присутствуют в каждой из четырех роботов-манипуляторов 100, 200, 300, 400, показанных на Фиг.3, и, по существу, нижеследующее описание элементов будет делаться со ссылкой на все четыре робота-манипулятора 100, 200, 300, 400.
Каждый робот-манипулятор 100, 200, 300, 400 содержит первое, второе и третье звенья 50, 52, 54, соединенные с возможностью вращения друг с другом посредством локтевых суставов 56, 58, и несущее средство доильных стаканов. В настоящем варианте осуществления, несущее средство доильных стаканов представляет собой захват 60 для доильного стакана, шарнирно соединенный с третьим звеном 54 в запястном суставе 62. Однако в альтернативном варианте осуществления (не показан), робот-манипулятор 100, 200, 300, 400 снабжен средством поддерживания двух или более доильных стаканов одновременно. Это несущее средство может, например, содержать элемент, имеющий два углубления, в каждом из которых может размещаться доильный стакан. Каждый робот-манипулятор 100, 200, 300, 400 также содержит шарнирный узел 64, от которого отходит первое звено 50. Первое звено [60] является поворачиваемым вокруг центральной оси 66 посредством шарнирного узла 64.
Работа роботов-манипуляторов 100, 200, 300, 400 показана на Фиг.3. Шарнирные узлы 64 каждого робота-манипулятора 100, 200, 300, 400 разнесены в окружном направлении друг от друга на расстояние, равное ширине доильного бокса 5. Соответственно, следует понимать, что четыре робота-манипулятора 100, 200, 300, 400 работают для одновременного обслуживания соседних боксов 5 платформы 3. Как показано на 3, каждый робот-манипулятор 100, 200, 300, 400 выполнен с возможностью перемещения конкретного доильного стакана 21a, 21b, 21c, 21d из магазина 27 в соединение с соответствующим соском 23a, 23b, 23c, 23d коровы 7.
В этом отношении, как только конкретный магазин 27 доильных стаканов перемещается в пределах досягаемости захвата 60 первого робота-манипулятора 100, захват 60 захватывает первый доильный стакан 21d и перемещает указанный доильный стакан в предполагаемое положение первого соска 23d. Точное положение первого соска 23d затем определяется традиционным образом посредством использования соответствующего устройства обнаружения. Как только местонахождение соска 23d точно определено, робот-манипулятор 100 затем прикрепляет доильный стакан 21d к соску 23d. Когда бокс 5 и его магазин 27 проходят мимо каждой из оставшихся роботов-манипуляторов 200, 300, 400, каждый робот-манипулятор 200, 300, 400 по очереди прикрепляет один из оставшихся трех доильных стаканов 21c, 21b, 21a. Процесс происходит непрерывно, когда платформа 3 вращается таким образом, как показано на Фиг.3, когда первый робот-манипулятор 100 прикрепляет доильный стакан 21d к соответствующему соску 23d коровы 7 в боксе S15, второй робот-манипулятор одновременно прикрепляет доильный стакан 21с к соску 23с коровы 7 в боксе S16, и так далее. Соответственно, как только бокс 5 перемещен мимо всех четырех роботов-манипуляторов, все четыре доильных стакана 21 будут нанесены на соски 23 коровы 7 в этом конкретном боксе 5.
Следует понимать, что обеспечение четырех роботов-манипуляторов 100, 200, 300, 400, работающих как описано выше, означает, что каждому роботу-манипулятору необходимо только выполнять одну операцию для нанесения одного из четырех доильных стаканов 21a, 21b, 21c, 21d. По существу, время, требующееся каждому роботу-манипулятору 100, 200, 300, 400 для выполнения обслуживания, уменьшено в четыре раза. Это обеспечивает возможность каждому роботу-манипулятору 100, 200, 300, 400 оставаться неподвижным относительно платформы 3 без риска перемещения бокса 5 за пределы рабочего диапазона до завершения обслуживания. Скорость вращения платформы также может быть увеличена.
Вследствие уменьшенного времени обслуживания, необходимо, чтобы рабочий диапазон каждого робота-манипулятора был только достаточным, чтобы он был способен обслуживать только доильный бокс, расположенный в непосредственной близости к нему. Однако является предпочтительным для каждого робота-манипулятора 100, 200, 300, 400, чтобы он был способен выдвигаться на достаточное расстояние также для обслуживания соседнего доильного бокса, как показано на Фиг.2 и 3. Со ссылкой, в частности, на Фиг.3, показанное доение включает робота-манипулятора 100, 200, 300, 400, которые способны выдвигаться в достаточной степени, чтобы обслуживать не только доильный бокс, расположенный непосредственно перед каждым манипулятором, но также и два доильных бокса, расположенных по обеим сторонам указанного бокса. Конкретно, следует понимать, что доильный бокс S14 расположен непосредственно возле первого робота-манипулятора 100. Шарнирный узел 64 первого робота-манипулятора 100 расположен на продленной центральной линии доильного бокса S14 (т.е. воображаемой радиальной линии, расположенной посередине между радиальными боковыми стенками бокса). С первым роботом-манипулятором 100 и платформой 3 в этом относительном положении, как показано на Фиг.3, охватываемый/рабочий диапазон первого робота-манипулятора 100 является достаточным для обеспечения возможности обслуживания указанным манипулятором доильного бокса, когда он перемещается из положения доильного бокса S13 на Фиг.3 в положение доильного бокса S15. В действительности, первый робот-манипулятор 100 выдвигается таким образом, чтобы продолжать обслуживание доильного бокса, когда он перемещается за положение доильного бокса S15 в направлении стрелки 11, как показано на Фиг.3. Следует понимать, что первый робот-манипулятор 100 имеет охватываемый/рабочий диапазон, перекрывающий ширину трех доильных боксов (под номерами S13, S14 и S15 на Фиг.3).
Для дополнительной ясности, что касается Фиг.2, будет видно, что первый робот-манипулятор 100 готов начать обслуживание доильного бокса S15 до того как этот бокс достигнет шарнирного узла 64 первого робота-манипулятора 100. Следует понимать, что бокс S16 (не показан), и, в частности, его магазин 27 на этом этапе будет находиться в пределах рабочего диапазона второго робота-манипулятора 200 (не показана). Каждый робот-манипулятор 100, 200, 300, 400, следовательно, имеет продленный период времени, во время которого обслуживается бокс 5, в результате увеличения рабочего диапазона каждого робота-манипулятора 100, 200, 300, 400. Комбинация этого увеличенного рабочего диапазона с уменьшенным временем, требующимся каждому манипулятору для выполнения собственной обслуживающей работы, дополнительно уменьшает задержки в обслуживании бокса, даже при сложных обстоятельствах.
Следует понимать, что в одновременном обслуживании боксов, робота-манипулятора 100, 200 теоретически могут совершать одни и те же действия одновременно. Другими словами, каждый робот-манипулятор 100, 200, 300, 400 может, например, прикреплять свои соответствующие доильные стаканы 21d, 21c, 21b, 21a к соску 23 в один и тот же момент. Однако на практике робота-манипулятора, вероятно, отстают на разные величины (обычно вследствие перемещения животного), таким образом, хотя разные боксы одновременно обслуживаются, робота-манипулятора 100, 200, 300, 400 не являются синхронизированными в их перемещении. В действительности, следует подчеркнуть, что второй робот-манипулятор 200 может отставать на такую величину, что первый робот-манипулятор 100 начинает обслуживание следующего бокса до того, как второй робот-манипулятор 200 завершит свое задания на обслуживание и также способен перемещаться к следующему боксу. Например, роботы-манипуляторы 100, 200, 300, 400 на Фиг.3 показаны как прикрепляющие их соответствующие доильные стаканы к соску одновременно, однако следует понимать, что на практике первый робот-манипулятор 100 вполне может столкнуться с меньшим количеством задержек в прикреплении доильного стакана, чем, например, второй робот-манипулятор 200, и, следовательно, уже начал бы обслуживание следующего доильного бокса S14. Соответственно, две робота-манипулятора 100, 200 в таком случае одновременно обслуживали бы доильные боксы под номерами S14 и S16.
Следовательно, следует понимать, что роботы-манипуляторы 100, 200, 300, 400 работают полностью независимо друг от друга в том смысле, что один робот-манипулятор не снижает свою скорость прикрепления доильного стакана для того, чтобы сохранить темп с отстающим роботом-манипулятором. Тем не менее система управления координирует перемещение роботов-манипуляторов 100, 200, 300, 400 таким образом, чтобы гарантировать то, что роботы-манипуляторы 100, 200, 300, 400 не сталкиваются друг с другом. Следует понимать, что риск столкновения является сравнительно большим, когда обслуживающиеся боксы требуют, чтобы роботы-манипуляторы 100, 200, 300, 400 пересекались друг с другом. Как рассмотрено выше, настоящее изобретение не требует, чтобы один манипулятор протягивался за другую для обслуживания дополнительного бокса, таким образом нежелательное пересечение манипуляторов вследствие такого действия не происходит. Однако второй робот-манипулятор 200 на Фиг.3 вполне может, на практике, испытывать меньшее количество задержек в прикреплении доильного стакана, чем первый робот-манипулятор 100, и, следовательно, способен начать обслуживание следующего бокса (доильного бокса S15) до того, как первый робот-манипулятор 100 завершит обслуживание того же доильного бокса. При этих обстоятельствах, две робота-манипулятора 100, 200 будут работать в одной и той же области и могут быть вынуждены пересекаться друг с другом при одновременном обслуживании доильного бокса S15. Это пересечение может быть уменьшено до минимума посредством соответствующего выбора того, какой робот-манипулятор связан с каким соском. Например, на Фиг.3, пересечение манипуляторов 100, 200 является менее вероятным, если первый манипулятор 100 связан с соском 23с, а второй манипулятор 200 связан с соском 23d. Однако другие факторы, такие как доступ к соответствующей части магазина 27 и возможное запутывание трубок 20, означают, что идеальное взаимное расположение не всегда будет возможным, таким образом некоторое пересечение по-прежнему может происходить. Электронная система управления и способ, использующийся для исключения столкновения двух роботов 100, 200, описываются более подробно ниже.
В дополнительном варианте осуществления, электронная система управления может быть приспособлена для обеспечения возможности выполнения одним роботом-манипулятором 100, 200, 300, 400 операции обслуживания, обычно осуществляемой дополнительным роботом-манипулятором 100, 200, 300, 400. Робот-манипулятор может работать таким образом временно, в течение короткого периода времени, в обстоятельствах, при которых указанный дополнительный робот-манипулятор так отстал в прикреплении доильного стакана, что бокс переместился за пределы своего диапазона до завершения своей обслуживания. Например, если первый робот-манипулятор 100 не выполняет прикрепление своего доильного стакана 21d вовремя, это может быть определено, и операция взамен может быть выполнена вторым роботом-манипулятором 200 либо до, либо после того, как он прикрепит свой доильный стакан 21с. Такое скоординированное обслуживание одного и того же доильного бокса может исключить необходимость уменьшения скорости вращения платформы. Принимая во внимание преимущества изобретения, описанные выше, этот вариант является менее вероятным, чем с системами по предшествующему уровню техники, но по-прежнему может происходить в крайних случаях, или когда отказывает один робот-манипулятор. Аналогичная работа также будет полезной в случае, когда корове 7 удается сбросить доильный стакан 21 после его прикрепления. Отсоединение может быть обнаружено, и дополнительный робот-манипулятор в таком случае может повторно нанести данный доильный стакан. Как только содействие было обеспечено конкретным роботом-манипулятором, этот робот-манипулятор затем возвращается к своей нормальной работе. В качестве альтернативы, в случае, когда первый робот-манипулятор ломается или требует технического обслуживания, дополнительный манипулятор может быть выполнен с возможностью прикрепления двух доильных стаканов в течение более длительного времени, возможно, для обеспечения возможности технического обслуживания одного робота-манипулятора не прерывая процесс доения.
Роботы-манипуляторы 100, 200, 300, 400 могут быть обеспечены с один или более бесконтактными датчиками, которые определяют, когда робот-манипулятор находится в непосредственной близости, например, от ноги коровы 7 или предмета доильного оборудования.
Роботы-манипуляторы 100, 200, 300, 400 имеют относительно простую конструкцию, так как каждый требует только ограниченного рабочего диапазона и свободы перемещения. Как показано и описано, каждый манипулятор 100, 200, 300, 400 является выдвигаемым, но, как упомянуто выше, это не является важной особенностью. Роботы уровня техники, использовавшиеся для доения, с осями движения до шести или семи не требуются в доильных залах, описанных здесь, благодаря преимуществам, обеспеченным настоящим изобретением.
Однако робот-манипулятор, имеющий шесть или семь осей движения, может использоваться вместо, по меньшей мере, одного из роботов-манипуляторов 100, 200, 300, 400, описанных выше. Дополнительные оси движения обеспечивают особенное содействие для избегания ног коровы и/или доильного оборудования, такого как дополнительный робот-манипулятор (как определено бесконтактным датчиком на роботе-манипуляторе). Дополнительная гибкость обеспеченного движения дает возможность двум роботам-манипуляторам более легко избегать друг друга и обычно перемещаться скоординированным образом. Как описано выше, имеет место меньшая потребность в этой свободе движения в результате конструкции настоящего изобретения. Однако может быть предпочтительным, чтобы один или более из последних роботов-манипуляторов, например четвертый робот-манипулятор 400 и/или третий робот-манипулятор 300, имел бόльшую гибкость/свободу движения, так как эти манипуляторы более вероятно должны взаимодействовать с другими манипуляторами и/или повторно прикреплять отсоединенные доильные стаканы, как описано выше. В качестве примера, первые три манипулятора 100, 200, 300 могут иметь очень простую конструкцию, тогда как четвертый манипулятор 400 может представлять собой манипулятор с шестью или семью степенями подвижности с увеличенной свободой движения, чтобы позволить ей более легко компенсировать какие-либо проблемы, испытываемые другими манипуляторами 100, 200, 300.
Также следует понимать, что хотя несущественно, какой-либо из роботов-манипуляторов 100, 200, 300, 400, показанных на Фиг.3, может поддерживаться на основании, подвижном в направлении стрелки 11, например на рельсе или на телескопически выдвигаемом элементе. Таким образом, роботы-манипуляторы 100, 200, 300, 400 Фиг.3 могут перемещаться в общем направлении вращения платформы 3 для того, чтобы обеспечить дополнительное время, если требуется, для завершения обслуживания.
Относительно последнего, шарнирный узел 64 каждого робота-манипулятора 100, 200, 300, 400 может быть смонтирован на телескопически выдвигаемом элементе, который сам смонтирован на полу доильного зала посредством узла основания. Следует понимать, что платформа 3 вращается мимо каждого узла основания, который остается в неизменном месте в доильном зале 1. Каждый выдвигаемый элемент является телескопически выдвигаемым в общем в тангенциальном направлении относительно платформы 3. Каждый робот-манипулятор 100, 200, 300, 400 тем самым может перемещаться вдоль части круговой траектории с платформой 3, таким образом положение робота-манипулятора 100, 200, 300, 400 относительно конкретного доильного бокса 5 может сохраняться в пределах заданного угла вращения платформы. Следует понимать, что этот угол, частично, определяется величиной, на которую может выдвигаться телескопический элемент. Более того, для способствования сохранению неизменного относительного положения между каждым роботом-манипулятором 100, 200, 300, 400 (конкретно, шарнирным узлом 64) и связанным боксом 5, соответствующий узел основания может быть вращаемым для обеспечения возможности вращения выдвигаемого элемента 34 в плоскости, параллельной полу доильного зала.
В вариантах осуществления, описанных выше, в которых роботы-манипуляторы расположены таким образом, чтобы работать в непосредственной близости друг от друга, следует понимать, что будет иметь место общий объем, который находится в охватываемом/рабочем диапазоне каждого робота-манипулятора, таким образом столкновение между манипуляторами является возможным. Этот общий объем рассматривается электронной системой управления в виде множества подобъемов (например, матрицы подобъемов). Если робот-манипулятор перемещается для расположения в одном или более из этих подобъемов, то система управления обеспечит, чтобы другой робот-манипулятор перемещался таким образом, чтобы не располагаться в этих подобъемах. Таким образом, предотвращено расположение более одного робота-манипулятора в заданном подобъеме одновременно. Для обеспечения достаточного пространства между роботами-манипуляторами, электронная система управления может предохранять робот-манипулятор от перемещения в подобъем, расположенный рядом с подобъемом, занятым другим роботом-манипулятором.
Следует понимать, что каждый робот-манипулятор может посылать электронные сигналы, сообщающие информацию касательно его работы. Эта информация обычно относится к ходу выполнения задачи по обслуживанию. Передача этой информации может осуществляться роботом-манипулятором на центральную электронную систему управления, которая управляет перемещением нескольких роботов-манипуляторов, как описано выше. В качестве альтернативы, эта информация может посылаться от робота-манипулятора непосредственно на одну или более других роботов-манипуляторов, таким образом каждый из этих других роботов-манипуляторов может отдельно изменять свою собственную работу, как считается необходимым с точки зрения полученной информации. Например, информация, переданная роботом-манипулятором, может относится к текущему положению этого манипулятора. При получении такой информации от соседнего робота-манипулятора, дополнительный робот-манипулятор может определять, что его собственное перемещение должно быть изменено для предотвращения столкновения с соседним роботом-манипулятором.
Настоящее изобретение не ограничивается на конкретных вариантах осуществления, описанных выше. Альтернативные конструкции будут очевидными для специалиста в данной области техники. Например, изобретение может использоваться не только с параллельно-вращающимися доильными залами, как описано выше, но также с вращающимися доильными залами типа "елочка". В любом случае, доильный зал может использовать старт/стопную систему или систему непрерывного движения платформы. Также, хотя предпочтительный вариант осуществления выше описывает использование четырех роботов, один для каждого соска, является возможным использовать только два робота. Когда предусмотрены только два робота, один может использоваться для прикрепления доильных стаканов 21d и 21с к передним соскам коровы, а другой может использоваться для прикрепления доильных стаканов 21b и 21а к задним соскам коровы. Однако в альтернативном варианте осуществления, имеющем только два робота, один из роботов используется для прикрепления доильных стаканов 21d и 21b к левым соскам коровы, а другой из роботов используется для прикрепления доильных стаканов 21с и 21а к правым соскам коровы.
Дополнительно или в качестве альтернативы, несущее средство доильных стаканов может быть способным поддерживать больше, чем один доильный стакан (например, два доильных стакана) одновременно, причем будучи способным захватывать и/или прикреплять/снимать доильные стаканы по отдельности (т.е. один за раз). Таким образом, где используются два робота, количество перемещений, совершаемых роботом-манипулятором от магазина доильных стаканов до животного, уменьшено с двух (когда доильные стаканы захватываются и перемещаются по отдельности) до одного (когда доильные стаканы перемещаются парами от магазина до животного). Несущее средство доильных стаканов может быть обеспечено множеством (например, двумя) приемников для доильных стаканов для размещения доильного стакана. Каждый приемник может представлять собой захват или может содержать электромагнит, приводимый в действие независимо от электромагнитов, связанных с другими приемниками.
В дополнительной альтернативной конструкции, каждый робот-манипулятор снабжен средством для обнаружения расположения соска животного, подлежащего доению. Это средство обнаружения может представлять собой традиционную видеокамеру 501, 502 и/или некоторый другой оптический датчик, такой как система позиционирования сканирующим лазером. В идеале, средство обнаружения представляет собой 3D (трехмерную) камеру, такую как времяпролетная камера. Этот тип камеры обеспечивает восприятие глубины, т.е. обеспечивает возможность определения расстояния до объектов в пределах кадра. Следовательно, следует понимать, что центральная система управления будет обеспечена информацией от средства обнаружения касательно области вблизи робота-манипулятора и, в частности, средства переноса доильных стаканов. Так как относительные положения средства обнаружения соска и средства переноса доильных стаканов являются известными центральной системе управления, центральная система управления может легко приспосабливаться к перемещению средства переноса доильных стаканов к соску, обнаруженному средством обнаружения соска, и тем самым обеспечивать возможность легкого прикрепления доильного стакана к обнаруженному соску.
Образ, которым средство обнаружения соска ориентировано относительно робота-манипулятора и связанного средства переноса доильных стаканов, зависит от конкретного соска животного, который, при использовании, подлежит обслуживанию роботом-манипулятором. Обычно, задние два соска молочной коровы расположены слегка ниже, чем два передних соска. Следовательно, следует понимать, что передние два соска, в частности, имеют склонность загораживаться другими двумя сосками, если смотреть с задней стороны животного. Это может представлять трудности для средства обнаружения соска в обнаружении передних сосков с места позади животного. Соответственно, средство обнаружения соска может быть ориентировано относительно робота-манипулятора таким образом, чтобы учитывать эту потенциальную проблему.
Более конкретно, такой или каждый робот-манипулятор 100, 200 для прикрепления доильного стакана к заднему соску, (первый тип робота-манипулятора) может быть снабжен средством 501 обнаружения соска, которое направлено вперед, когда доильный стакан перемещается на место и прикрепляется к соску с задней стороны связанного животного (см. Фиг.4 и 5). Также, такой или каждый робот-манипулятор 300, 400, для прикрепления доильного стакана к переднему соску, (второй тип робота-манипулятора) может быть снабжен средством 502 обнаружения соска, которое направлено назад, когда доильный стакан перемещается на место и прикрепляется к соску с задней стороны связанного животного (см. Фиг.6 и 7).
Как показано на Фиг.4-7 прилагаемых чертежей, средство обнаружения робота-манипулятора первого типа 100, 200 расположено в положении относительно средства 503 переноса доильных стаканов (захвата для одного доильного стакана) робота-манипулятора первого типа 100, 200, которое является отличным от положения средства 502 обнаружения робота-манипулятора второго типа 300, 400 относительно средства 504 переноса доильных стаканов (захвата для одного доильного стакана) робота-манипулятора второго типа 300, 400. Разные относительные положения средств 501, 502 обнаружения двух типов роботов-манипуляторов обеспечивают возможность размещения средств 501, 502 обнаружения в наилучшем положении для обнаружения конкретного соска до и во время прикрепления доильного стакана к этому соску. Например, положение средств 501, 502 обнаружения может быть оптимизировано таким образом, чтобы уменьшить до минимума степень, на которую сосок, подлежащий обслуживанию, загораживается от средств 501, 502 обнаружения (например, другим соском животного, подлежащего доению).
Средство 501 обнаружения робота-манипулятора первого типа 100 предназначено для обнаружения в первом направлении (обозначенном стрелкой 505 на Фиг.4) относительно робота-манипулятора первого типа 100, 200, а средство 502 обнаружения робота-манипулятора второго типа 300 предназначено для обнаружения во втором направлении (обозначенном стрелкой 506 на Фиг.7) относительно второго робота-манипулирования 100, причем указанные первый и второй относительные направления являются противоположными друг другу. Следует понимать со ссылкой на прилагаемые чертежи, что, в первом типе устройства манипулирования, камера первого средства обнаружения смотрит в одном направлении вниз по манипулятору указанного первого типа, тогда как у манипулятора второго типа камера второго средства обнаружения смотрит в противоположном направлении вверх по манипулятору второго типа.
Как показано на Фиг.3, роботы-манипуляторы 100, 200, 300, 400 расположены относительно платформы 3 таким образом, что, при использовании, указанные роботы-манипуляторы 100, 200, 300, 400 прикрепляют доильные стаканы к соскам животного посредством выдвигания с задней стороны указанного животного. Во время использования, положение и ориентация средства обнаружения относительно связанного средства переноса доильных стаканов являются такими, что средство 501 обнаружения робота-манипулятора первого типа 100, 200 обнаруживает в направлении от положения с задней стороны сосков животного к передней стороне животного, а средство 502 обнаружения робота-манипулятора второго типа 300 обнаруживает в направлении от положения спереди сосков животного к задней стороне животного. Хотя роботы-манипуляторы будут четко маневрировать из одного положения в другое в ходе выдвигания между ногами животного и принятия подходящего положения для прикрепления доильного стакана, средство обнаружения будет продолжать обнаружение в обычных направлениях, упомянутых выше, так как перемещение роботов-манипуляторов из положений, обеспечивающих такое обнаружение, не имеет тенденции происходить во время прикрепления.
Как будет видно из Фиг.4 и 5, средство обнаружения робота-манипулятора первого типа 100, 200 расположено на одной стороне (в настоящем варианте осуществления, сзади) средства 503 переноса доильных стаканов первого типа робота-манипулятора и ориентировано таким образом, чтобы видеть указанное несущее средство 503 доильных стаканов. Как будет видно из Фиг.6 и 7, средство 502 обнаружения робота-манипулятора второго типа 300, 400 расположено на стороне (в настоящем варианте осуществления, спереди) средства 504 переноса доильных стаканов робота-манипулятора второго типа 300, 400 и ориентировано таким образом, чтобы видеть указанное несущее средство доильных стаканов робота-манипулятора второго типа 300, 400. Следовательно, следует понимать, что указанная сторона первого средства переноса доильных стаканов является другой стороной относительно указанной стороны второго средства переноса доильных стаканов. Первое средство 501 обнаружения смонтировано непосредственно на манипуляторе робота первого типа 100, 200 и, разумеется, сзади средства 503 переноса доильных стаканов. Однако для расположения второго средства 502 обнаружения спереди средства 504 переноса доильных стаканов, второе средство 502 обнаружения смонтировано на кронштейне или вспомогательном звене 508, которое само смонтировано на манипуляторе робота 300, 400 и продолжается вперед за средство 504 переноса доильных стаканов.
С целью ясности, доильный зал может содержать два указанных робота-манипулятора первого типа и два указанных робота-манипулятора второго типа. Также, термин направление обнаружения используется для ссылки на направление от средства обнаружения к области, которая зондируется средством обнаружения.
Стойло, устройство в стойле и способ монтажа указанного устройства
Щетка для домашнего скота, устройство, содержащее щетку данного типа, и способ обработки щеткой домашнего скота
Устройство для ухода
Вращающийся зал для доения животных
Схема и способ обнаружения
Установка для автоматической мойки доильных стаканов роторной доильной платформы
Промывочная система для устройства очистки сосков
Хлорированное щелочное моющее средство трубопровода с метансульфокислотой
Способ сборки эластичных паркетных досок, которые снабжены механической блокирующей системой
Устройство и способ определения количественного показателя состояния тела животного
Стойло, устройство в стойле и способ монтажа указанного устройства
Щетка для домашнего скота, устройство, содержащее щетку данного типа, и способ обработки щеткой домашнего скота
Устройство для ухода
Вращающийся зал для доения животных
Схема и способ обнаружения
Установка для автоматической мойки доильных стаканов роторной доильной платформы
Промывочная система для устройства очистки сосков
Хлорированное щелочное моющее средство трубопровода с метансульфокислотой
Способ сборки эластичных паркетных досок, которые снабжены механической блокирующей системой
Устройство и способ определения количественного показателя состояния тела животного

