Результат интеллектуальной деятельности: СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предлагаемая группа изобретений относится к области разработки систем наведения (СН) ракет и может быть использована в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет, является повышение точности их наведения.
Известен способ наведения вращающейся ракеты, заключающийся в формировании модулированного излучения, приеме аппаратурой управления ракеты этого излучения, формировании сигнала, пропорционального координатам ракеты относительно оси луча, совмещенной с линией визирования цели (ЛВЦ), формировании сигналов управления посредством преобразования сигналов, пропорциональных координатам ракеты и связанных с лучом лазера, в систему координат, связанную с вращающейся ракетой, и преобразовании сигналов управления в отклонение рулей /патент RU №2107879, МПК6 F41G 7/00, 7/24, 27.03.98/.
СН, реализующая этот способ, включает источник модулированного излучения на пусковой установке и управляемую ракету. Аппаратура управления ракеты принимает модулированное излучение, вырабатывает сигналы, пропорциональные ее отклонениям относительно центра излучения (оси луча), и формирует команды управления рулями в связанной с вращающейся ракетой системе координат. Отклонения рулей возвращают ракету к оси луча.
Аналогично лучевым СН осуществляется управление ракетой в командных СН с тем лишь различием, что формирование сигнала, пропорционального координатам ракеты относительно ЛВЦ, производится на пусковой установке (командном пункте), и затем он передается на борт ракеты по линии связи /Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, с.29/.
Недостатком этих способов является формирование сигналов управления пропорционально только отклонениям ракеты, а необходимые для наведения сигналы управления, пропорциональные скорости изменения (производной) этих отклонений, отсутствуют.
Наиболее близким к предлагаемому является способ наведения вращающейся ракеты /патент RU №2219473, МПК7 F41G 7/24, F42B 15/01, 20.12.03/, заключающийся в формировании сигнала рассогласования между ракетой и ЛВЦ, суммировании сигнала рассогласования и сигнала, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования, модуляции суммарного сигнала периодическим по углу крена сигналом и преобразовании полученного сигнала в отклонение рулей ракеты.
СН /патент RU №2219473, МПК7 F41G 7/24, F42B 15/01, 20.12.03/, реализующая этот способ, включает последовательно соединенные формирователь сигнала рассогласования (ФСР) между ракетой и ЛВЦ, звено с регулируемым временем запаздывания (ЗРЗ), суммирующий усилитель (СУ), модулятор и привод руля (ПР), причем второй вход СУ соединен с выходом ФСР, а также блок выработки периодического по углу крена сигнала (БВСК), выход которого соединен со вторым входом модулятора, и измеритель периода (ИП), вход которого соединен с выходом БВСК, а выход соединен со вторым входом ЗРЗ, по которому осуществляется регулировка времени запаздывания τ.
В известном способе обеспечивается формирование сигнала управления, пропорционального отклонению ракеты от ЛВЦ (в вертикальной и горизонтальной плоскостях декартовой системы координат), и производной этого отклонения. Результирующий суммарный сигнал управления UΣ(t) на выходе СУ имеет вид:

где t - текущее полетное время;
U(t) - сигнал рассогласования на выходе ФСР;
U(t-τ) - сдвинутый на время запаздывания τ сигнал рассогласования U(t);
k - постоянный коэффициент (значение к выбирается 2…5).
Параметры k, τ определяют степень дифференцирования отклонения. Регулировка времени запаздывания τ от периода вращения ракеты по крену, измеряемого ИП, на вход которого поступает сигнал с БВСК, обеспечивает изменение дифференцирующих свойств в зависимости от изменения характеристик ракеты (скорость, частота собственных колебаний) по полету.
Модуляция суммарного сигнала UΣ периодическим по углу крена сигналом с БВСК преобразует сигнал управления из системы координат, связанной с ЛВЦ, в сигнал во вращающейся системе координат, связанной с ракетой, который преобразуется ПР в отклонение руля ракеты.
Данный способ обеспечивает снижение чувствительности СУ к высокочастотным помехам в целом по сравнению с применением традиционных дифференцирующих устройств и отсутствие «подчеркивания» помех на удвоенной частоте вращения ракеты по крену и частотах, кратных удвоенной частоте вращения по крену. Амплитудная частотная характеристика (АЧХ) блока, состоящего из ЗРЗ и СУ, на указанных частотах при реализации способа равна единице.
В СН рассматриваемого класса возможно наличие в сигнале рассогласования случайных помех на различных частотах, например вследствие флуктуации атмосферы. В случае появления помех на удвоенных частотах вращения по крену при определенном уровне их амплитуды возможно существенное ухудшение качества процесса наведения, в особенности для одноканальных систем с одной парой рулей.
Так, например, при наличии на выходе ФСР полезного сигнала U(t), содержащего информацию об отклонении ракеты, и сигнала помехи UП(t)=AПcos2γ на удвоенной частоте вращения ракеты по углу крена γ, команда управления рулями в связанной вращающейся системе координат UM(t), сформированная на выходе модулятора, будет иметь вид:

(с учетом того, что АЧХ блока, состоящего из ЗРЗ и СУ на частотах помехи и полезного сигнала, равна 1), а соответствующее ей отклонение рулей в одной из плоскостей земной системы координат:
 .
.
После тригонометрических преобразований имеет вид:

Все гармонические составляющие команды на удвоенной и учетверенной частоте вращения подавляются ракетой как инерционным звеном и отсутствуют в отклонениях ракеты.
Результирующее отклонение ракеты от ЛВЦ запишется в виде:
где kp [м/В] - коэффициент передачи системы по цепи, включающей ПР, ракету (планер, как динамической звено) /Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, с.104-113/ и кинематические соотношения /Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965, с.376-379/.
Отсутствие подавления помехи на удвоенной частоте вращения в данном способе определяет наличие в отклонении ракеты составляющей, зависящей от амплитуды помехи, и может приводить к существенному искажению (вплоть до срыва) процесса наведения при помехах, сопоставимых по величине с полезным сигналом.
Недостатком данного способа и реализующей его СН является неполное подавление помех на удвоенных частотах вращения по крену.
Задачей предлагаемой группы изобретений является повышение точности наведения за счет полного подавления помех на указанных частотах.
Поставленная задача решается за счет того, что по сравнению с известным способом, заключающимся в формировании сигнала рассогласования между ракетой и ЛВЦ, суммировании сигнала рассогласования и сигнала, пропорционального разности сигнала рассогласования и сдвинутого на время запаздывания сигнала рассогласования, модуляции суммарного сигнала периодическим по углу крена сигналом и преобразовании полученного сигнала в отклонение руля ракеты, новым является то, что суммарный сигнал дополнительно суммируют со сдвинутым на время запаздывания τ1 суммарным сигналом, причем время запаздывания регулируют в соответствии с частотой  вращения ракеты по углу крена согласно зависимости
вращения ракеты по углу крена согласно зависимости  , при этом для τ1 устанавливают ограничение по максимальному значению не более 0,05 с.
, при этом для τ1 устанавливают ограничение по максимальному значению не более 0,05 с.
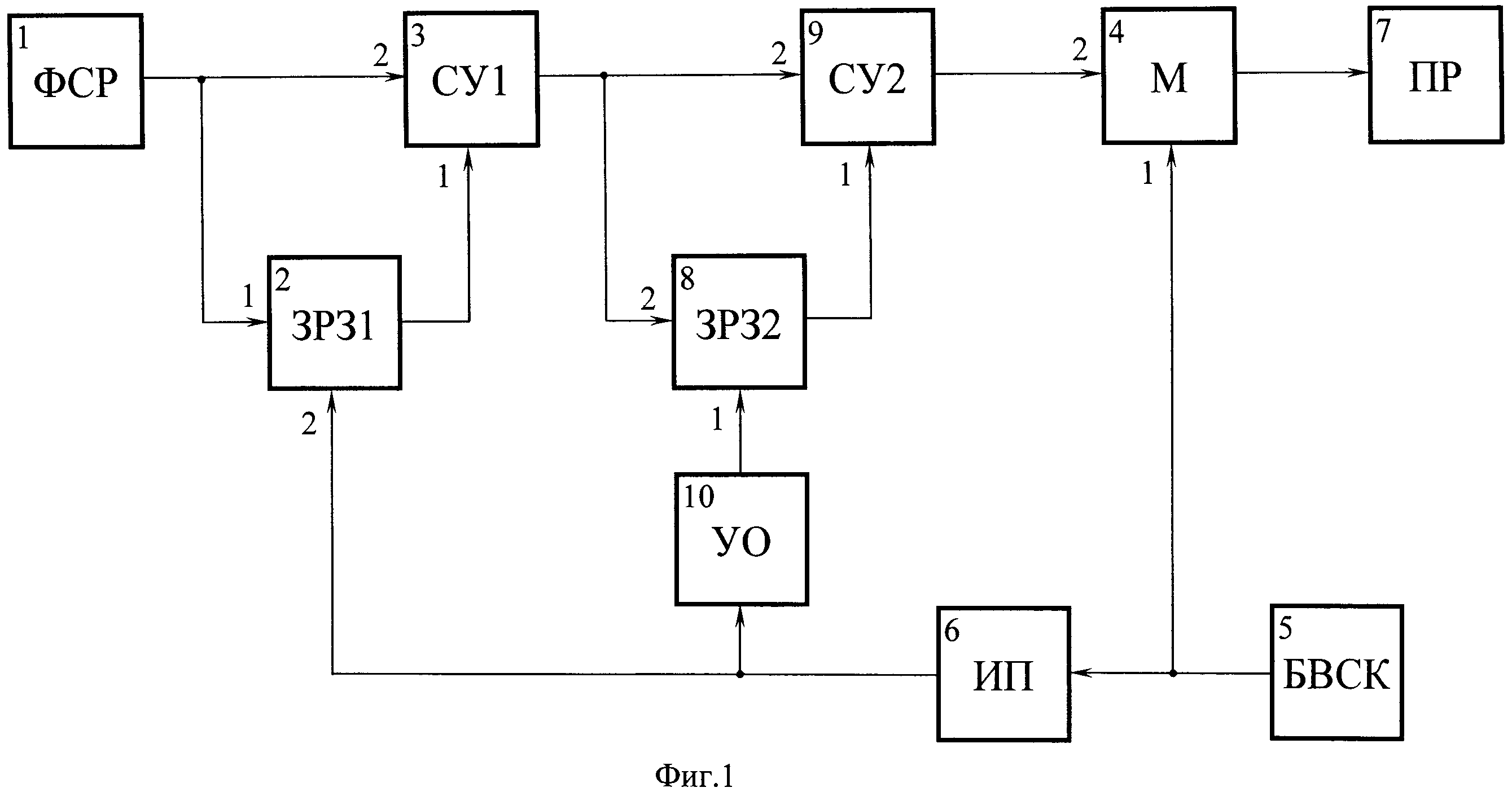
В СН вращающейся ракеты, реализующей этот способ, включающей последовательно соединенные формирователь сигнала рассогласования между ракетой и линией визирования цели, звено с регулируемым временем запаздывания и суммирующий усилитель, второй вход которого соединен с выходом формирователя сигнала рассогласования, последовательно соединенные модулятор и привод руля, а также блок выработки периодического по углу крена сигнала, выход которого соединен с первым входом модулятора и входом измерителя периода, выход которого соединен со вторым входом звена с регулируемым временем запаздывания, новым является то, что в нее введены последовательно соединенные усилитель с ограничением, второе звено с регулируемым временем запаздывания и второй суммирующий усилитель, выход которого соединен со вторым входом модулятора, а второй вход соединен с выходом первого суммирующего усилителя, выходом соединенного со вторым входом второго звена с регулируемым временем запаздывания, при этом вход усилителя с ограничением соединен с выходом измерителя периода.
Предлагаемое изобретение поясняется графическим материалом.
Структура предлагаемой СН приведена на фиг.1, где 1 - ФСР, 2 - первое ЗРЗ (ЗРЗ1), 3 - первый СУ (СУ1), 4 - модулятор (М), 5 - БВСК, 6 - ИП, 7 - ПР, 8 - второе ЗРЗ (ЗРЗ2), 9 - второй СУ (СУ2), 10 - усилитель с ограничением (УО).
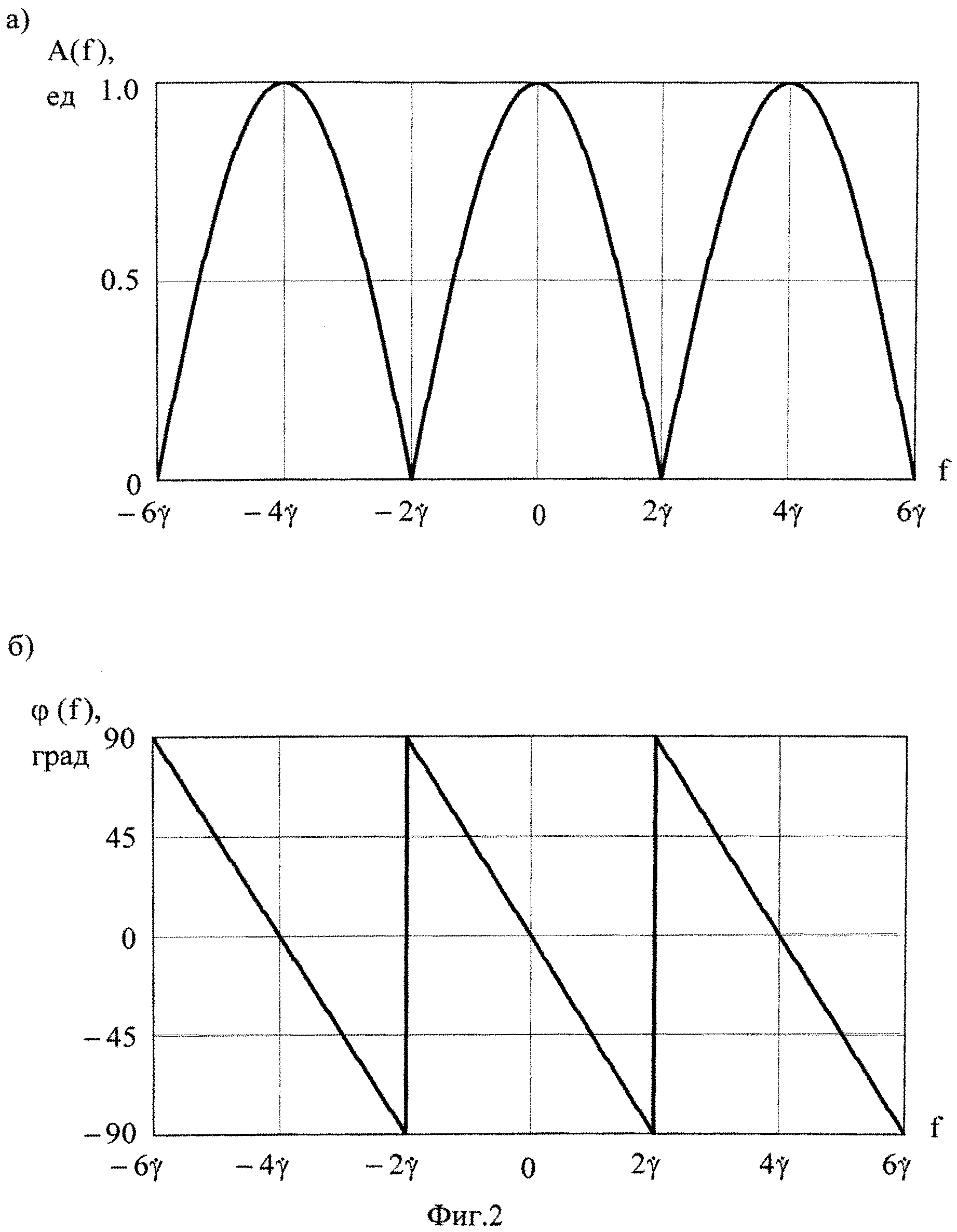
На фиг.2 представлены АЧХ A(f) и фазовая частотная характеристика (ФЧХ) φ(f) блока введенных элементов, состоящего из ЗРЗ2 8 и СУ2 9.
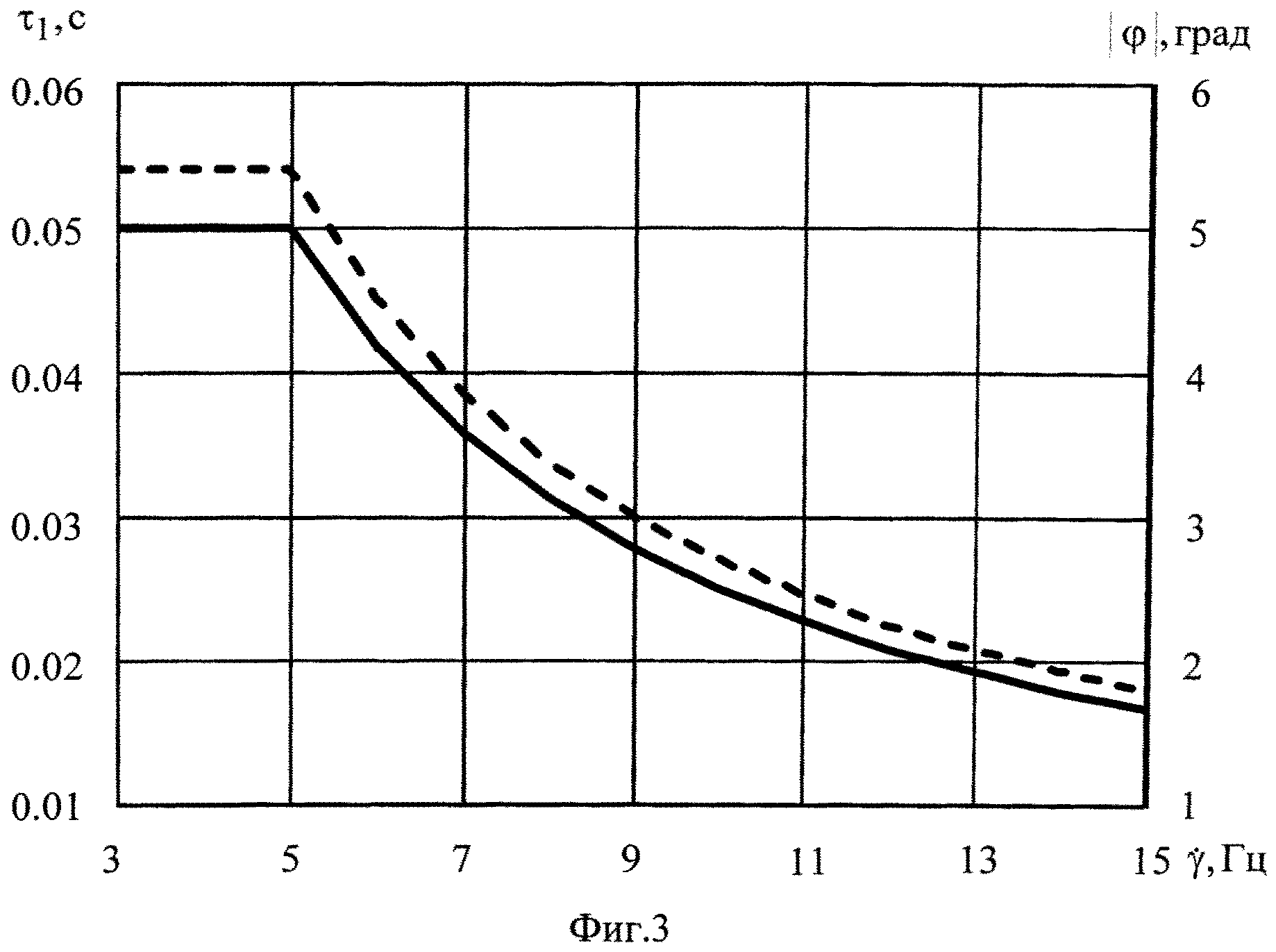
График изменения времени запаздывания τ1 и модуля фазового запаздывания φ введенного блока в зависимости от частоты вращения ракеты
по углу крена приведен на фиг.3 (сплошной и штриховой линиями соответственно).
СН работает следующим образом.
Сигнал с выхода ФСР 1 (фиг.1) поступает на ЗРЗ1 2 и СУ1 3. Выходной сигнал СУ1 3 (с различными коэффициентами усиления по его входам, соответствующими прототипу) пропорционален текущим и предшествующим отклонениям ракеты от оси луча, создавая тем самым дифференцирующий эффект. Изменение времени запаздывания ЗРЗ1 2 осуществляется по его второму входу, соединенному с ИП 6, обеспечивая тем самым пропорциональность времени запаздывания периоду вращения ракеты по крену. Сигнал, пропорциональный текущему значению угла крена ракеты, поступает на ИП 6 с выхода БВСК 5.
Далее сигнал с выхода СУ1 3 поступает по двум цепям на СУ2 9, имеющий одинаковые коэффициенты усиления по двум своим входам, причем по одной из цепей сигнал проходит через ЗРЗ2 8 с переменным временем запаздывания  , регулируемым при помощи сигнала с ИП 6, поступающего на второй вход ЗРЗ2 8 через УО 10. В УО 10 реализуется коэффициент передачи
, регулируемым при помощи сигнала с ИП 6, поступающего на второй вход ЗРЗ2 8 через УО 10. В УО 10 реализуется коэффициент передачи  согласно зависимости
согласно зависимости  , где
, где  - период вращения ракеты по углу крена, и вводится ограничение τ1max=0,05 с.
- период вращения ракеты по углу крена, и вводится ограничение τ1max=0,05 с.
Поскольку время запаздывания  устанавливается равным половине периода
устанавливается равным половине периода  сигнала помехи, на выходе ЗРЗ2 8 периодический сигнал помехи сдвинут в сторону запаздывания относительно исходного сигнала помехи с выхода ФСР 1 на половину своего периода по времени (на 180° по фазе). В результате на первый и второй входы СУ2 9 поступают два сигнала помехи, находящиеся в противофазе, и на выходе СУ2 9 при одинаковых коэффициентах по входам их сумма равна нулю. В результате работы введенных новых элементов в выходном сигнале СУ2 9 содержится информация только о текущих координатах ракеты.
сигнала помехи, на выходе ЗРЗ2 8 периодический сигнал помехи сдвинут в сторону запаздывания относительно исходного сигнала помехи с выхода ФСР 1 на половину своего периода по времени (на 180° по фазе). В результате на первый и второй входы СУ2 9 поступают два сигнала помехи, находящиеся в противофазе, и на выходе СУ2 9 при одинаковых коэффициентах по входам их сумма равна нулю. В результате работы введенных новых элементов в выходном сигнале СУ2 9 содержится информация только о текущих координатах ракеты.
Регулировка времени запаздывания τ1 сигналом с ИП 6 позволяет осуществлять подавление в сигналах координат помехи на удвоенной частоте вращения по крену в соответствии с ее текущим значением в процессе полета ракеты.
Результирующий сигнал управления с выхода СУ2 9 преобразуется на модуляторе M 4 с помощью опорного сигнала с выхода БВСК 5 из системы координат, связанной с ЛВЦ, во вращающуюся систему координат, связанную с ракетой, и поступает на ПР 7. Отклонения рулей возвращают ракету к ЛВЦ.
Поскольку ЗРЗ2 9 описывается передаточной функцией (ПФ)  , введенный блок элементов имеет ПФ общего вида:
, введенный блок элементов имеет ПФ общего вида:
 ,
,
где k1, k2 - коэффициенты соответственно по первому и второму входам СУ2 9;  - оператор дифференцирования по времени.
- оператор дифференцирования по времени.
При реализации k1=k2=0,5 ПФ блока  соответствует ПФ фильтра полного подавления в сигнале рассогласования помех на частотах
соответствует ПФ фильтра полного подавления в сигнале рассогласования помех на частотах  , где m=0,±1,±2,…. АЧХ блока A(f), представленная на фиг.2а, на этих частотах равна нулю. При этом постоянный сигнал (на частоте f=0) передается блоком без изменения (на нулевой частоте АЧХ равна единице, а ФЧХ на фиг.2б равна нулю).
, где m=0,±1,±2,…. АЧХ блока A(f), представленная на фиг.2а, на этих частотах равна нулю. При этом постоянный сигнал (на частоте f=0) передается блоком без изменения (на нулевой частоте АЧХ равна единице, а ФЧХ на фиг.2б равна нулю).
Ограничение максимального времени регулируемого запаздывания связано с необходимостью минимизации инерционности блока введенных элементов (определяющей быстроту формирования команды управления) и соответственно вносимого блоком на частоте среза СН по амплитуде fc (в Гц) фазового запаздывания (в градусах), которое согласно ПФ составляет:
Откуда следует, что
где φmax(fc) - значение φ(fc), предельно допустимое с точки зрения влияния на величину запаса устойчивости СН по фазе φз, определяемого, как известно, на частоте среза СН по амплитуде fc /Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, с.57-58/.
Фазовое запаздывание, вносимое блоком на этой частоте, не должно превышать 15-20% величины запаса по фазе, т.е.

Следовательно, время регулируемого запаздывания не должно превышать:
Например, для СН рассматриваемого класса ракет с частотами среза fc=0,6 Гц и запасом устойчивости по фазе φз=30° значение τ1max составляет приблизительно 0,05 с. На фиг.3 сплошной линией представлен график изменения времени запаздывания τ1 в зависимости от частоты вращения ракеты по углу крена с учетом вводимого ограничения. При этом модуль фазового запаздывания (введенного блока (штриховая линия на фиг.3) на частоте среза СН по амплитуде fc=0,6 Гц не превышает 5,4°, что существенно не уменьшает запас устойчивости СН по фазе.
Следует отметить, что при введении указанных новых операций непосредственно после формирования сигнала рассогласования (при соответствующем изменении связей в СН) технический результат не меняется.
Однако, например, в СН комплексов безгироскопных ПТУР семейства «Метис» /Ангельский Р.Д. Отечественные противотанковые комплексы. Иллюстрированный справочник. - М.: ACT, Астрель, 2002, с.103-108/ существует своя специфика: БВСК представляет собой не традиционный гироскопический датчик угла крена, а совокупность устройств в наземной аппаратуре управления, где информацию об угловом положении ракеты получают благодаря установке трассера на конце одной из консолей крыльев. Особенности формирования сигналов в такой СН требуют введения указанных новых операций перед модуляцией согласно предлагаемой формуле изобретения.
Предложенная совокупность технических решений позволяет осуществлять подавление в СН помех на удвоенных частотах вращения ракеты по крену, обеспечивая уменьшение отклонений ракеты, вызываемых этими помехами.
В качестве элементов, входящих в состав СН, могут быть использованы устройства, представленные в ближайшем аналоге /патент RU №2219473, МПК7 F41G 7/24, F42B 15/01, 20.12.03/.
В качестве УО может быть использована схема /Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для ABM. - М.: Энергия, 1978, с.61/.
Применение предлагаемого способа и СН вращающихся по углу крена ракет позволяет повысить точность их наведения.

Двигательная установка реактивной системы управления летательного аппарата
Жидкостный ракетный двигатель
Способ наведения вращающейся ракеты и система наведения для его осуществления
Способ формирования сигналов управления снарядом
Способ вывода ракеты в зону захвата цели головкой самонаведения и система для его осуществления (варианты)
Управляемый снаряд
Стенд для испытания прицела на вибрацию
Объединенная двигательная установка ракетного блока
Турбокомпрессор (варианты)
Способ наведения ракет, управляемых по лучу лазера, и ракетный комплекс для его осуществления
Двигательная установка реактивной системы управления летательного аппарата
Жидкостный ракетный двигатель
Способ наведения вращающейся ракеты и система наведения для его осуществления
Способ формирования сигналов управления снарядом
Способ вывода ракеты в зону захвата цели головкой самонаведения и система для его осуществления (варианты)
Управляемый снаряд
Стенд для испытания прицела на вибрацию
Объединенная двигательная установка ракетного блока
Турбокомпрессор (варианты)
Способ наведения ракет, управляемых по лучу лазера, и ракетный комплекс для его осуществления

