Результат интеллектуальной деятельности: ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ
Вид РИД
Изобретение
Изобретение относится к промышленным и сельскохозяйственным тракторам и агрегатам на их базе, в частности к бульдозерам.
Известен гусеничный трактор с электромеханической трансмиссией, содержащей двигатель внутреннего сгорания (ДВС), планетарный механизм с двумя согласующими зубчатыми передачами, две электрические машины постоянного тока, главную передачу, двухступенчатый планетарный механизм поворота, два бортовых редуктора с ведущими колесами и механизмы поворота с бортовыми фрикционами и тормозами [1].
Его недостатками являются повышенная сложность и недостаточная надежность, обусловленные наличием главной передачи, бортовых фрикционов и тормозов, подверженных износу в процессе эксплуатации.
Наиболее близким к предложенному является гусеничный трактор с электромеханической трансмиссией, содержащий ДВС, генератор, функционально соединенный с двигателем, два электродвигателя, механически соединенные с бортовыми редукторами, гусеничный движитель с ведущими и натяжными колесами, соединенный с бортовыми редукторами и приспособленный для создания тягового усилия, систему электрооборудования трансмиссии, выполненную с возможностью преобразования выходного напряжения генератора в постоянное напряжение силовой сети трансмиссии, его последующей коммутации и передачи на электродвигатели, накопитель энергии в силовой сети, привод рабочего оборудования, а также систему низковольтного электрооборудования, содержащую контроллер, аккумуляторную батарею и средство для ее заряда, а также устройства освещения, световой и звуковой сигнализации, контрольно-измерительные приборы и другие низковольтные потребители электрического тока [2].
В этом тракторе, благодаря установке отдельных тяговых электродвигателей на каждый борт трактора, как это показано на фиг.4, обеспечивается упрощение конструкции его механической части и обеспечивается возможность реализации поворотов трактора без установки бортовых фрикционов и тормозов. Однако при этом возникает проблема реализации функции рабочего тормоза трактора.
Эта функция, ввиду отсутствия бортовых фрикционов и, соответственно, возможности механического отсоединения тяговых электродвигателей от бортовых редукторов, не может быть реализована с помощью стояночных тормозов ввиду их недостаточной мощности и износоустойчивости.
Поэтому для осуществления торможения трактора осуществляется перевод тяговых электродвигателей в генераторный режим. При этом энергия торможения трактора (кинетическая энергия при снижении скорости движения трактора) преобразуется в электрическую энергию. Это, в свою очередь, порождает проблему накопления и дальнейшего использования или утилизации этой энергии, поскольку в противном случае возникают недопустимые перенапряжения в силовой сети трансмиссии.
В известном тракторе энергия торможения, преобразованная в электрическую энергию, передается в накопитель энергии, выполненный в виде высоковольтной аккумуляторной батареи или электрохимических суперконденсаторов.
Их наличие приводит к усложнению, удорожанию и увеличению массы трактора. В то же время скорость движения гусеничного трактора невелика (скорость бульдозера, например, в рабочем режиме обычно не превышает 3…4 км/ч, а в транспортном - 10 км/ч). Поскольку кинетическая энергия пропорциональна квадрату скорости движения, ее низкие значения предопределяют относительно небольшое количество электрической энергии, полученной от тяговых электродвигателей, работающих в режиме генераторов при торможении трактора.
По этой причине применение накопителей энергии на гусеничных тракторах в отличие, например, от автомобилей, в большинстве случаев оказывается нецелесообразным. Затраты на их установку, как правило, не окупаются экономией топлива, получаемой за счет передачи энергии, полученной накопителями энергии в режиме торможения, тяговым электродвигателям в рабочем режиме трактора.
Для утилизации энергии торможения (кинетической энергии, преобразованной в электрическую), в случае отсутствия накопителей энергии в высоковольтной силовой цепи, трактор может дополнительно оснащаться блоком мощных балластных резисторов с устройством их подключения к силовой цепи. Это также приводит к усложнению конструкции трактора.
Возможна также реализация рабочего торможения трактора при помощи ДВС. В этом случае генератор переводится в режим электродвигателя и передает энергию торможения обратно в ДВС, что приводит к увеличению его скорости. Этот способ торможения обладает низкой эффективностью.
Кроме того, при утилизации энергии торможения путем как подключения к силовой сети балластных резисторов, так и передачи этой энергии в ДВС, не представляется возможным реализовать эффективное регулирование тормозного момента и, соответственно, достижение необходимой плавности торможения трактора.
Задачей, на решение которой направленно изобретение, является создание гусеничного трактора с электромеханической трансмиссией, в котором достигается основной технический результат - обеспечивается эффективное рабочее торможение гусеничного трактора с электромеханической трансмиссией при использовании его узлов и агрегатов без применения дополнительных устройств, специально предназначенных для реализации функции рабочего торможения, а также для накопления и утилизации энергии торможения трактора.
Дополнительным техническим результатом изобретения является повышение надежности гусеничного трактора за счет ограничения напряжения в силовой сети и упрощения конструкции - исключения необходимости применения рабочих тормозов, блока балластных резисторов с соответствующим коммутирующим устройством, высоковольтного накопителя энергии и т.д.
При реализации гусеничного трактора с электромеханической трансмиссией, содержащего двигатель внутреннего сгорания (ДВС) и соединенный с ним генератор, два электродвигателя, механически соединенные с бортовыми редукторами, гусеничный движитель, систему электрооборудования трактора, выполненную с возможностью преобразования выходного напряжения генератора в постоянное напряжение силовой сети трансмиссии, его последующей коммутации и передачи на электродвигатели, привод рабочего оборудования, а также низковольтную часть указанной системы электрооборудования, содержащую аккумуляторную батарею и низковольтные потребители электрического тока, причем электродвигатели приспособлены для работы в режиме генератора и преобразования кинетической энергии движения трактора в электрическую энергию при его торможении (энергию торможения), указанные технические результаты достигаются за счет того, что в этом тракторе реализовано по меньшей мере одно из следующих технических решений:
а) применен понижающий преобразователь напряжения, подключенный к силовой сети трансмиссии и приспособленный для передачи, по меньшей мере, части энергии торможения в аккумуляторную батарею низковольтной части системы электрооборудования;
б) осуществляется передача, по меньшей мере, части энергии торможения через генератор на насос гидравлического или электрогидравлического привода рабочего оборудования или вала отбора мощности;
в) применен электромеханический привод рабочего оборудования или вала отбора мощности, при этом система электрооборудования трактора приспособлена для передачи, по меньшей мере, части энергии торможения трактора на электродвигатель этого привода;
г) коммутация обмоток статоров электрических машин системой электрооборудования трактора осуществляется из условия обеспечения необходимого тормозного момента и поглощения, по меньшей мере, части энергии торможения.
В зависимых пунктах охарактеризованы предпочтительные варианты реализации гусеничного трактора с электромеханической трансмиссией и пути его улучшения. Их содержание с анализом влияния на указанные технические результаты приведено при описании различных вариантов реализации предложенного изобретения.
В предложенном техническом решении, в соответствии с указанными отличительными признаками, реализуется передача энергии торможения, под которой подразумевается избыточная энергия в силовой сети трансмиссии, возникающая в результате преобразования кинетической энергии трактора в электрическую энергию при его торможении, в аккумуляторную батарею низковольтной части системы электрооборудования, в гидравлический, электрогидравлический или электромеханический привод рабочего оборудования или вала отбора мощности, или осуществляется изменение режимов коммутации обмоток электрических машин таким образом, чтобы, по меньшей мере, часть энергии торможения в этих электрических машинах превращалась в тепловую энергию.
Реализация одного из указанных способов утилизации энергии торможения (способов торможения), либо нескольких способов торможения поочередно или одновременно в их любом сочетании, обеспечивает эффективное рабочее торможение гусеничного трактора с электромеханической трансмиссией с использованием узлов и агрегатов, имеющихся на тракторе. При этом не требуется применения дополнительных устройств, специально предназначенных для реализации функции рабочего торможения, а также для накопления и утилизации энергии торможения, что обеспечивает достижение указанного основного технического результата.
При этом одновременно осуществляется ограничение напряжения в силовой сети и упрощается конструкция трактора, поскольку исключается необходимость применения рабочих тормозов, блока балластных резисторов с соответствующим коммутирующим устройством, высоковольтного накопителя энергии и других устройств, которые используются на известных тракторах для реализации функции рабочего торможения. Это обеспечивает достижение дополнительного технического результата - повышение надежности трактора.
Из уровня техники неизвестны передача энергии торможения в аккумуляторную батарею низковольтного электрооборудования, в гидравлический, электрогидравлический или электромеханический привод рабочего оборудования или вала отбора мощности, а также преднамеренное увеличение тепловых потерь в электрических машинах с целью реализации торможения гусеничного трактора с электромеханической трансмиссией.
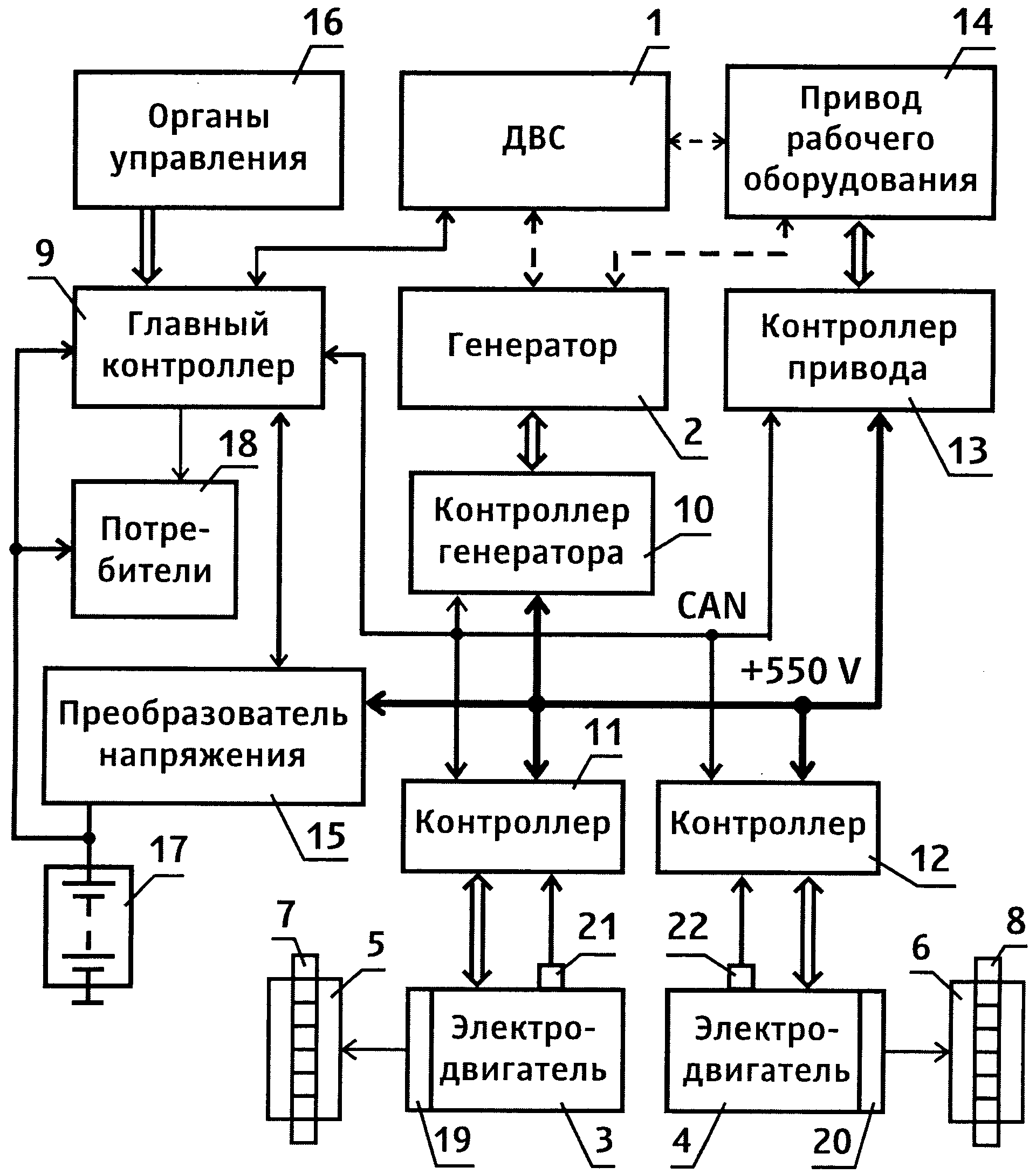
На чертеже приведена упрощенная схема предложенного гусеничного трактора с электромеханической трансмиссией, которая может именоваться также электрической трансмиссией.
Роль первичного источника энергии выполняет приводной двигатель 1, выполненный, как правило, в виде двигателя внутреннего сгорания (ДВС), преимущественно дизеля.
В приведенном примере используется последовательная кинематическая схема моторно-трансмиссионной установки трактора, которая исключает механическую связь ДВС с гусеничным движителем. ДВС непосредственно, через жесткую (глухую), компенсирующую или упругую муфту, либо через согласующий (раздаточный) редуктор и муфту, соединен с генератором 2, который является источником электрической энергии для двух тяговых электродвигателей 3 и 4, которые непосредственно или через дополнительные передаточные устройства (муфты, валы, дополнительные зубчатые передачи и т.д.) механически соединены с бортовыми редукторами 5, 6.
На бортовых редукторах закреплены ведущие колеса (звездочки) 7, 8 гусеничного движителя, создающего тяговое усилие трактора за счет перематывания гусеничных лент.
Система электрооборудования (система контроля, защиты и управления) трактора включает в себя высоковольтную и низковольтную части и представлена в виде главного (ведущего) контроллера 9, контроллера 10 генератора 2, двух контроллеров 11, 12 электродвигателей 3, 4, контроллера 13 привода рабочего оборудования или вала отбора мощности 14, преобразователя напряжения 15 и органов управления движением и торможением трактора 16 и других устройств.
Контроллер 10 генератора 2 преобразует выходное напряжение генератора 2, например, переменное трехфазное напряжения 3×380 В, в постоянное напряжение силовой сети трансмиссии, например, 550 В. В частном случае этот контроллер может быть выполнен в виде синхронного трехфазного мостового выпрямителя.
Контроллеры 11 и 12 осуществляют коммутацию (преобразование) этого напряжения в переменное напряжение, либо в однополярные импульсы перед подачей на электродвигатели 3, 4. Они могут быть выполнены в виде силовых частотных преобразователей, инверторов или коммутаторов и имеют встроенные системы управления, реализованные на основе микроконтроллеров.
На тракторе возможно объединение контроллеров 9-13 в единый блок (модуль), либо их раздельное исполнение в зависимости от выполняемых функций и требований к компоновке трактора. Возможно также конструктивное объединение контроллера 10 с генератором 1, а контроллеров 11, 12 с электродвигателями 3, 4.
Параметры выходных сигналов контроллеров определяются типами использованных электродвигателей и сигналами управления этими контроллерами, поступающими от главного (ведущего) контроллера 9.
Линии передачи информационных сигналов между контроллерами выполнены с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров), ориентированной на объединение в единую сеть различных устройств с использованием последовательного, широковещательного и пакетного режимов передачи. Возможно также применение интерфейсов LIN (Local Interconnection Network), RS-485 (стандарт EIA/TIA) и т.д., а также беспроводных интерфейсов типа ZigBee (стандарт IEEE 802.15.4), Wi-Fi (стандарт IEEE 802.11), Bluetooth (стандарт IEEE 802.15.1) и т.п.
Главный контроллер 9 осуществляет координацию работы всех контроллеров системы электрооборудования, а также реализует функции управления двигателем 1 непосредственно, либо через дополнительный контроллер двигателя, встроенный в него.
Электродвигатели 3, 4 могут быть асинхронными частотно-управляемыми. Однако более предпочтительным является применение вентильных реактивных (индукторных, индукционных) электродвигателей (ВРД, ВИД, ВИРД) - трех или более фазных электродвигателей без магнитов и электромагнитов в роторе и статоре, управляемых электронными ключами контроллеров 11, 12. В англоязычной литературе они называются электродвигателями с переменным магнитным сопротивлением: «Switched Reluctance Motor (SRM)».
Перспективно также применение синхронных электродвигателей с постоянными магнитами в роторе, которые на английском языке называются «Permanent Magnet Synchronous Motor (PMSM)». Реже используется название «BrushLess Direct Current motor (BLDC)», что переводится, как «Бесщеточный мотор постоянного тока».
Генератор 2 может иметь конструкцию, аналогичную электродвигателям 3, 4 или отличающуюся от них.
Контроллер 10 обеспечивает также коммутацию обмоток генератора 2 при его работе в режиме электродвигателя (выполняет функции синхронного выпрямителя), а контроллеры 11, 12 - коммутацию обмоток электродвигателей 3, 4 при их работе в режиме генератора.
Трактор может быть оснащен рабочим (навесным) оборудованием и/или валом отбора мощности (ВОМ). Они имеют механический, гидромеханический, гидравлический, электрогидравлический или электромеханический привод 14 их вращения или перемещения с использованием, соответственно, механического соединения с двигателем 1, дополнительного электродвигателя, электрически соединенного с генератором 2, либо гидравлического насоса, механически соединенного с двигателем 1 или генератором 2. Этот насос может быть установлен на одном валу с генератором 2 по тандемной схеме, либо присоединен к двигателю через раздаточный (согласующий редуктор). В последнем случае гидравлический насос привода 14, двигатель 1 и генератор 2 механически связаны между собой через этот редуктор, что обеспечивает возможность передачи энергии между ними.
Привод рабочего оборудования или ВОМ 14 имеет также по меньшей мере один гидроцилиндр, гидромотор, либо электродвигатель. Управление ими осуществляется трактористом с помощью органов управления 16 через главный контроллер 9 и контроллер 13 привода, либо этими контроллерами в автоматическом режиме.
В случае применения гидравлического (гидромеханического, электрогидравлического) привода 14, на тракторе дополнительно устанавливается управляемое распределительное устройство, связывающее гидролиниями гидравлический насос, по меньшей мере, с одним гидравлическим цилиндром или гидравлическим мотором. Распределительное устройство, гидравлический насос и/или гидравлический мотор могут быть выполнены с пропорциональным или дискретным управлением от контроллера 13.
Низковольтная часть системы электрооборудования трактора содержит аккумуляторную батарею 17, устройства освещения, световой и звуковой сигнализации, контрольно-измерительные приборы и другие низковольтные потребители электрического тока 18.
В электродвигатели 3, 4 или в бортовые редукторы 7, 8 могут быть встроены нормально замкнутые стояночные тормоза 19, 20, управление которыми осуществляется непосредственно главным контроллером 9 или контроллерами 11, 12 электродвигателей. Контроллеры обеспечивают включение тормозов 19, 20 для предотвращения скатывания трактора под уклон, а также для его торможения и остановки, если по каким-либо причинам интенсивность электрического торможения оказывается недостаточной.
Контроллеры 11 и 12 осуществляют управление электродвигателями 3, 4 с возможностью изменения как скорости, так и направления движения трактора. Благодаря этому установки главной передачи, устройства дифференциального управления, бортовых фрикционов и рабочих тормозов не требуется, что обеспечивает упрощение конструкции трактора.
Для управления движением и приводом рабочего оборудования 14 трактор оснащен органами управления 16, в том числе, по меньшей мере, одним аппаратом управления движением машины (джойстиком), соединенным с главным контроллером 9, выполняющим функции центрального контроллера системы электрооборудования трактора. Сигналы торможения трактора могут формироваться аппаратом, например путем установки его рукоятки в нейтральное положение, либо с помощью отдельного органа управления, например, педали тормоза.
Контроллер 9 соединен также с панелью контрольно-измерительных приборов, выполненных электромеханическими или в виде графической панели и обеспечивающих отображение параметров работы трактора и формирование аварийных и предупредительных сигналов для тракториста.
Для контроля этих параметров на тракторе установлены соответствующие датчики, в том числе датчики 21, 22 угловых скоростей электродвигателей и/или положений их роторов.
Трактор содержит также различные дополнительные устройства, условно не показанные на чертеже, в том числе насос охлаждающей жидкости и соответствующий радиатор системы охлаждения двигателя 1, устройства рабочего освещения, кондиционер, стеклоочистители и т.д.
Гусеничный трактор с электромеханической трансмиссией работает следующим образом.
При вращении выходного вала дизельного двигателя 1 контроллер 10, в соответствии с информационными сигналами, поступающими от генератора 2, формирует необходимые сигналы на его обмотки (в случае применения вентильного индукторно-реактивного генератора).
Контроллер 10 выполняет функции выпрямителя. Напряжение постоянного тока силовой сети трансмиссии с его выхода поступает на контроллеры 11, 12, выполняющие функции силовых электронных коммутаторов или инверторов - преобразователей постоянного напряжения в переменное регулируемой частоты.
Тяговые электродвигатели 3, 4, получающие электрическую энергию от контроллеров 11, 12, преобразуют ее в механическую энергию и передают вращающий момент на бортовые редукторы 5, 6 и далее на ведущие звездочки 7, 8 гусеничного движителя, обеспечивая движение трактора.
Режимы работы двигателя 1, генератора 2 и электродвигателей 3, 4 задаются главным контроллером 9, связанным с органами управления трактором 16 и панелью приборов (контрольно-измерительными приборами). Он реализован на основе микроконтроллера и выполняет функции координатора системы электрооборудования трактора.
Во время работы трактора скорость его движения устанавливается контроллерами 9, 11, 12 в зависимости от положения рукоятки органа управления 16. Если мощности двигателя 1 достаточно для поддержания этой скорости при текущем значении тяговой нагрузки трактора, то он движется с заданной скоростью.
При увеличении тяговой нагрузки трактора возрастает необходимый крутящий момент электродвигателей 3, 4. Если этот момент не может быть реализован при заданной скорости вращения роторов электродвигателей (скорости движения трактора), то контроллеры 9, 11, 12 осуществляют снижение скорости вращения роторов электродвигателей при одновременном повышении крутящего момента.
При уменьшении тягового усилия трактора эти контроллеры автоматически увеличивают скорость вращения роторов электродвигателей 3, 4 и, соответственно, скорость движения трактора увеличивается до величины, заданной трактористом с помощью органов управления 16.
Контроллер генератора 10 при этом поддерживает заданное значение напряжения в силовой сети трансмиссии, например, 550 В постоянного тока.
Благодаря этому электромеханическая трансмиссия обеспечивает автоматическое регулирования тягового усилия и скорости движения трактора при полном использовании мощности двигателя 1.
Повороты трактора осуществляются путем задания разных угловых скоростей электродвигателей 3, 4. Датчики угловой скорости 21, 22 при этом используются для контроля этих скоростей и синхронизации работы бортов трактора с целью обеспечения его прямолинейного движения при отсутствии поворотов.
При поступлении на главный контроллер 9 сигнала остановки (торможения) трактора путем перевода органа управления его движением в нулевое положение или путем воздействия на орган управления тормозом (например, педаль), контроллеры 11, 12 по сигналам с главного контроллера 9 переводят электродвигатели 3, 4 в режим генераторов. Интенсивность торможения определяется положением (перемещением), углом наклона органа управления 16, или силой, с которой на него воздействует тракторист.
При этом электродвигатели 3, 4, работающие в режиме генератора, преобразуют кинетическую энергию движения трактора в электрическую энергию, именуемую энергией торможения, и подают ее в силовую сеть трансмиссии. В силовой сети трансмиссии образуется избыточная энергия, требующая утилизации. Далее преобразователь напряжения 15 низковольтной части системы электрооборудования трактора, работающий под управлением главного контроллера 9, осуществляет понижение напряжения в силовой сети трансмиссии и передачу избыточной энергии в силовой сети трансмиссии (энергии торможения) в аккумуляторную батарею 17 низковольтной части системы электрооборудования.
Путем регулирования тормозного момента, создаваемого электродвигателями 3, 4, и тока заряда аккумуляторной батареи 17 обеспечивается необходимая интенсивность торможения, заданная органом управления 16.
Сигнал торможения может быть также сформирован самой системой электрооборудования трактора в автоматическом режиме без участия тракториста. Это происходит, например, при выявлении главным контроллером 9 неисправности трактора, при которой требуется его незамедлительная остановка.
При передаче энергии торможения в аккумуляторную батарею (АКБ) 17 необходим контроль уровня ее заряда и поддержание этого уровня в пределах, установленных из условия обеспечения функционирования низковольтного электрооборудования и запуска двигателя внутреннего сгорания, а также возможности поглощения энергии торможения.
Если аккумуляторная батарея полностью заряжена, то она не может поглощать энергию торможения (избыточную энергию в силовой сети трансмиссии). С другой стороны, при малом уровне ее заряда происходит недопустимое падение напряжения в низковольтной сети электрооборудования.
Для поддержания этого уровня главный контроллер 9 и преобразователь напряжения 15 отключают заряд АКБ от силовой сети трансмиссии в рабочем режиме работы трактора (вне интервалов времени, в которых осуществляется торможение), если уровень ее заряда превышает нижний установленный уровень и отсутствует сигнал торможения трактора с органа управления 16.
Если же уровень заряда АКБ 17 оказывается избыточным, т.е. если периодическое поступление в АКБ энергии торможения приводит к тому, что уровень заряда АКБ превышает верхний уровень, главный контроллер 9 осуществляет автоматическое включение устройств освещения и/или других низковольтных потребителей электрического тока 18. Благодаря этому АКБ не имеет 100% уровня заряда, что обеспечивает возможность поглощения энергии торможения в этой АКБ.
Нижний и верхний уровни заряда АКБ зависят от количества энергии торможения (избыточной энергии в силовой сети трансмиссии), подлежащей поглощению в этой АКБ, температуры окружающей среды и других факторов. Эти уровни предварительно определяются расчетным или экспериментальным путем и записываются в память главного контроллера 9.
Преобразователь напряжения 15 и АКБ 17 реализованы с возможностью работы в импульсном режиме. Если возможности такой реализации ограничены, параллельно АКБ может быть подключен суперконденсатор.
Передача энергии торможения из силовой сети трансмиссии в АКБ приводит к снижению напряжения в этой сети, что обеспечивает защиту высоковольтной части системы электрооборудования от перенапряжений и повышает ее надежность.
Преобразователь напряжения 15 может быть выполнен обратимым. В этом случае энергия АКБ под управлением главного контроллера 9 может передаваться в силовую сеть трансмиссии. Такой вариант реализации системы обеспечивает более гибкое управление зарядом/разрядом АКБ, а также возможность запуска двигателя 1 генератором 2, переведенным в режим электродвигателя, без применения стартера.
В другом варианте гусеничного трактора, на котором реализован другой альтернативный признак формулы изобретения, осуществляется передача энергии торможения в привод рабочего оборудования или вала отбора мощности. В этот случае при поступлении от органа управления 16 сигнала торможения трактора на главный контроллер 9, контроллеры 9-12 осуществляют переключение электродвигателей 3, 4 в режим генератора, а генератора 2 в режим электродвигателя. При этом кинетическая энергия торможения трактора через бортовые редукторы 5, 6, после преобразования в электрическую энергию и обратно, передается на вал генератора 2, работающего в двигательном режиме, и далее на механически связанные с ним гидравлический насос привода рабочего оборудования или ВОМ 14 и двигатель 1.
Главный контроллер 9 и/или контроллер 13 привода рабочего оборудования или ВОМ 14, анализируя выходные сигналы датчиков параметров работы трактора, его рабочего оборудования и ВОМ, проводит проверку допустимости передачи энергии торможения в этот привод из условий обеспечения безопасности работы трактора и требований к технологии работ, выполняемых агрегатом на базе этого трактора. Если такая передача возможна, контроллер 13 осуществляет перевод привода 14 в режим поглощения энергии торможения (избыточной энергии в силовой сети трансмиссии, образующейся при торможении), а именно - передачи крутящего момента генератора 1, работающего в режиме электродвигателя, на вал гидравлического привода насоса. Одновременно главный контроллер 9 снижает подачу топлива в двигатель 1, который создает дополнительный тормозной момент для генератора 2 и, соответственно, принимает участие в торможении трактора.
При переводе привода 14 в режим поглощения энергии торможения контроллер привода 13, в частности, устанавливает гидравлический распределитель этого привода в нейтральное положение. При этом поток рабочей жидкости проходит через переливной или предохранительный клапан. В результате этого энергия торможения преобразуется в тепловую энергию, выделяемую на этом клапане. Дополнительно контроллер 13 привода 14 регулирует давление на клапане и/или производительность (объем) гидравлического насоса привода 14 в зависимости от величины сигнала торможения, формируемого с помощью органа управления торможением 16 или в автоматическом режиме. Алгоритм работы контроллера 13 при работе в режиме торможения, реализованный программно его микроконтроллером, устанавливается из условия минимального изменения скорости и/или положения рабочего оборудования, либо минимального изменения скорости ВОМ.
Если на тракторе установлен электрический привод рабочего оборудования или ВОМ 16, то его приводной электродвигатель подключается к силовой сети трансмиссии через контроллер 13, реализующий аналогичную логику передачи энергии торможения в этот электродвигатель.
Управление приводом рабочего оборудования и ВОМ в рабочем режиме осуществляется трактористом с помощью органов управления, входящих в состав органов управления 16.
В различных вариантах реализации трактора может быть реализован как любой из указанных способов - передача энергии торможения в АКБ или привод рабочего оборудования или ВОМ, так и оба эти способа одновременно. При одновременном использовании обоих способов происходит перераспределение энергии торможения между АКБ и приводом. При этом достигается один и тот же технический результат.
Еще одним примером реализации трактора с использованием другого альтернативного признака является поглощение энергии торможения трактора непосредственно электродвигателями 3, 4 и/или генератором 2. В этом случае, при наличии сигнала торможения от органа управления 16, электродвигатели 3, 4 контроллерами 11, 12 также переводятся в генераторный режим, а генератор 2 контроллером 10 - в режим электродвигателя. При этом эти контроллеры реализуют режимы коммутации обмоток генератора 2 и электродвигателей 3, 4 таким образом, чтобы получить как нужный тормозной момент трактора, заданный органом управления 16, так и достаточно низкий коэффициент полезного действия генератора и электродвигателей, чтобы обеспечить поглощение в них энергии торможения. В данном случае энергия торможения выделяется в виде тепла в электродвигателях 3, 4 и в генераторе 2, которые на тракторах обычно имеют жидкостное охлаждение.
При осуществлении такого способа торможения контроллеры 9-13 дополнительно корректируют режимы коммутации обмоток электродвигателя и генератора таким образом, чтобы напряжение в силовой сети трансмиссии не превышало максимально допустимую величину. Благодаря этому достигается повышение надежности трансмиссии и трактора в целом.
С целью дальнейшего повышения этой надежности параллельно силовой сети трансмиссии может быть подключен варистор или конденсатор, предназначенный для подавления импульсных перенапряжений в этой сети.
Возможны также варианты реализации трактора, в котором реализованы не только отдельные альтернативные признаки независимого пункта формулы изобретения, но и любое количество альтернативных признаков а), б), в) и г) в их любом сочетании.
При этом система электрооборудования обеспечивает торможение трактора либо путем поочередной, либо путем одновременной или поочередной реализации нескольких альтернативных признаков изобретения. В этом случае выбор наилучшего сочетания различных способов торможения и приоритетов в их реализации осуществляет главный контролер 9 в зависимости от скорости движения трактора, его нагрузки и положений органов управления 16. Алгоритм этого выбора предварительно определен расчетным или экспериментальным путем и записан в памяти главного контроллера 9.
Трактор может быть оснащен нормально замкнутыми стояночными тормозами 19, 20, которые предназначены для удержания трактора на уклоне и не принимают участия при его нормальной работе (не являются рабочими тормозами трактора). Однако контроллеры 11, 12 могут осуществлять включение этих тормозов, если главным контроллером 9 будет установлено, что тормозного момента, создаваемого при реализации альтернативных способов торможения, недостаточно для торможения трактора с интенсивностью, заданной органом управления торможением 16.
Контроль действительного значения интенсивности торможения, например, величины отрицательного ускорения, осуществляется главным контроллером 9 с использованием выходных сигналов датчиков теоретической скорости движения трактора (датчиков 21, 22), действительной скорости или ускорения трактора. Далее главный контроллер, используя шину CAN или другой интерфейс передачи данных, передает в другие контроллеры информацию о требуемых параметрах и режимах работы связанных с ними узлов и агрегатов трактора, обеспечивая приведение в соответствие заданной и действительной интенсивности торможения трактора.
Для специалистов в данной области техники понятно, что кроме описанного гусеничного трактора с электромеханической трансмиссией возможны также иные варианты его реализации на основе признаков, изложенных в формуле изобретения.
Источники информации
1. RU 64144 U1, B60K 17/12, 05.03.2007.
2. RU 2394701 С2, B60L 11/12, B60K 6/00, 10.11.2009.
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины
Ограничитель нагрузки грузоподъемного крана
Многофункциональное устройство грузоподъемной машины
Устройство горизонтирования люльки автоподъемника
Ограничитель нагрузки грузоподъемной машины
Система управления землеройно-транспортной машины
Гидравлическая система машины с гидростатической трансмиссией
Землеройно-транспортная машина с гидростатической трансмиссией
Самоходная рабочая машина с электромеханической трансмиссией
Трактор с регистратором параметров
Система контроля гидростатической трансмиссии машины

