Результат интеллектуальной деятельности: КРАН-МАНИПУЛЯТОР (ВАРИАНТЫ)
Вид РИД
Изобретение
Изобретение относится к строительным кранам, а именно к кранам-манипуляторам на грузовых автомобилях.
Известен бортовой кран-манипулятор на грузовом автомобиле для выполнения погрузочных и разгрузочных работ (см. книгу: Автокраны с объемным гидроприводом. Рось Я.В. Киев: Техника, 1978, С.6, 7, 20, 21) [1]. Известный кран-манипулятор [1] включает автомобильное шасси, раму крана, основание, поворотную колонну, секции стрелы, гидроцилиндры секции, крюковую обойму, механизм поворота, выносные опоры
Недостатком крана-манипулятора [1] является отсутствие противовеса, уравновешивающего силы тяжести стрелы и груза.
Известен бортовой кран-манипулятор (см. книгу: Строительные машины: Справочник: в 2 т. Т. 1: Машины для строительства промышленных, гражданских сооружений и дорог. Под общей ред. Э.Н. Кузина. - 5-е изд. перераб. - М.: Машиностроение, 1991, С.225-227) [2]. Известная конструкция крана [2] содержит автомобильное шасси, раму крана, основание, поворотную колонну, секции стрелы, гидроцилиндры секций, крюковую обойму, поворотный механизм, выносные опоры.
Недостатком крана-манипулятора [2] является отсутствие противовеса и грузовой лебедки.
Известна конструкция автомобильного крана, которая использована в качестве прототипа, т.к. содержит все признаки предлагаемого изобретения (см. книгу: Л.В. Зайцев, М.Д. Полосин. Автомобильные краны.: - 4-е изд. - М.: Высш. шк. 1987, С.8-9) [3]. Известная конструкция крана [3] содержит шасси грузового автомобиля, раму крана, основание, поворотную платформу, стрелу, гидроцилиндр стрелы, грузовую лебедку, крюковую обойму, противовес, выносные опоры, поворотный механизм.
Недостатками известной конструкции [3] является сложная конструкция крана, содержащая опорно-поворотную платформу, на которой установлены грузовая лебедка и противовес.
Рассмотренный недостаток конструкции [3] приводит к увеличению массы крана и общих габаритных размеров.
Задачей заявляемого объекта является придание крану-манипулятору свойств, повышающих уравновешенность стрелы и общую устойчивость крана. Расширяются технологические возможности крана-манипулятора.
Поставленная задача первого варианта изобретения решена тем, что кран-манипулятор содержит шасси грузового автомобиля, раму крана, поворотную колонну, секции стрелы, гидроцилиндры секции стрелы, противовес, поворотный механизм, выносные опоры, в котором согласно изобретению противовес крана шарнирно соединен с основанием колонны и подвешен на тягах шарнирно к поворотной колонне, с возможностью вращения синхронно с поворотной колонной.
Поставленная задача второго варианта изобретения решена тем, что кран-манипулятор содержит шасси грузового автомобиля, раму крана, поворотную колонну, секции стрелы, гидроцилиндры секции стрелы, грузовую лебедку, крюковую обойму, противовес, поворотный механизм, выносные опоры, в котором согласно изобретению грузовая лебедка закреплена на поворотной колонне, а оголовок первой и второй секций стрелы снабжены сдвоенными блоками; противовес крана расположен внизу, шарнирно с возможностью синхронного вращения с поворотной колонной.
Иными словами, задача решена путем использования противовеса, расположенного внизу в первом варианте изобретения, и за счет использования грузовой лебедки и противовеса во втором варианте изобретения.
Технический результат изобретения достигается максимальным приближением грузовой лебедки к секциям стрелы, при этом низкое расположение противовеса является благоприятным для рабочих и транспортных режимов работы крана-манипулятора.
Заявляемое изобретение поясняется чертежами.
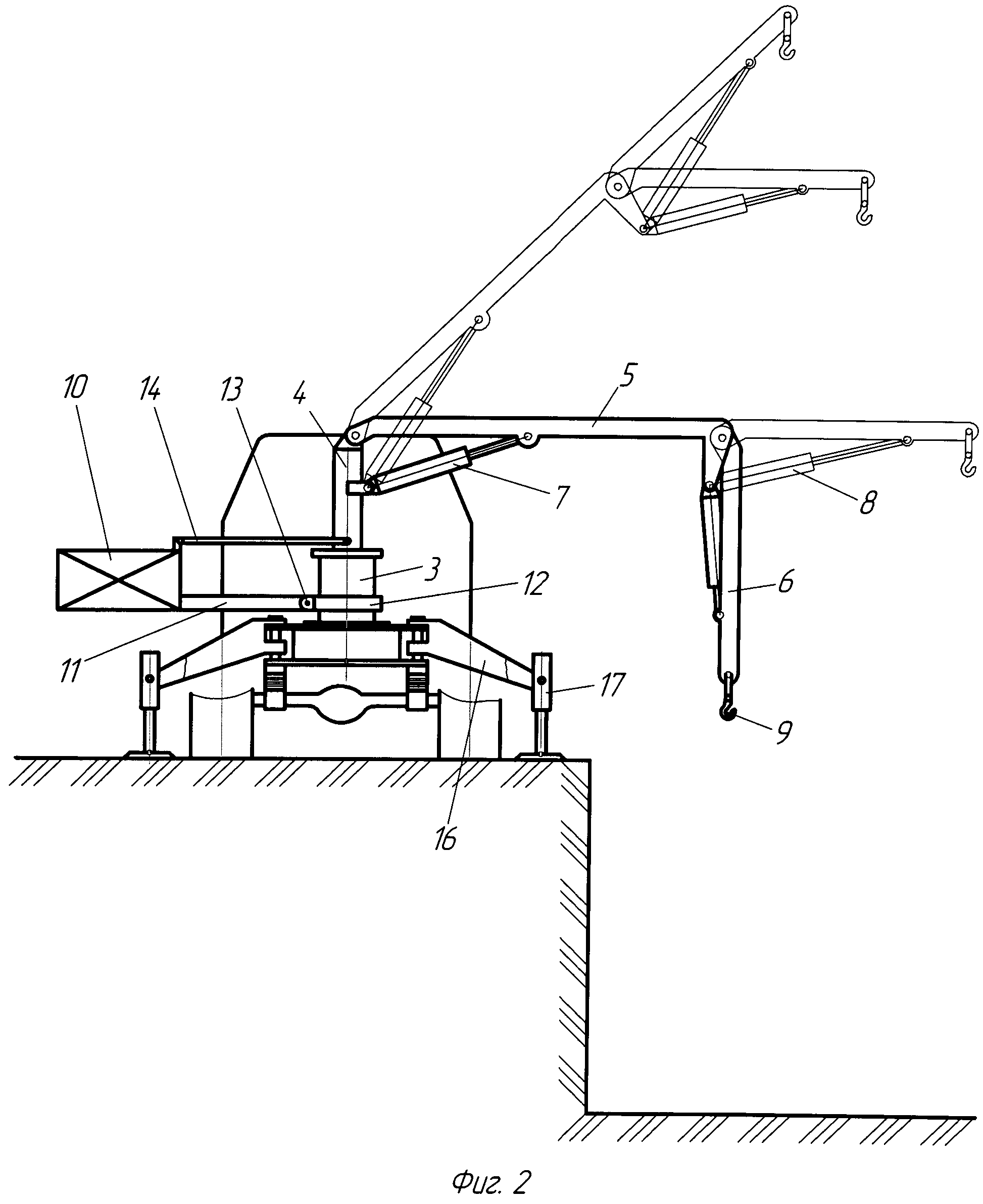
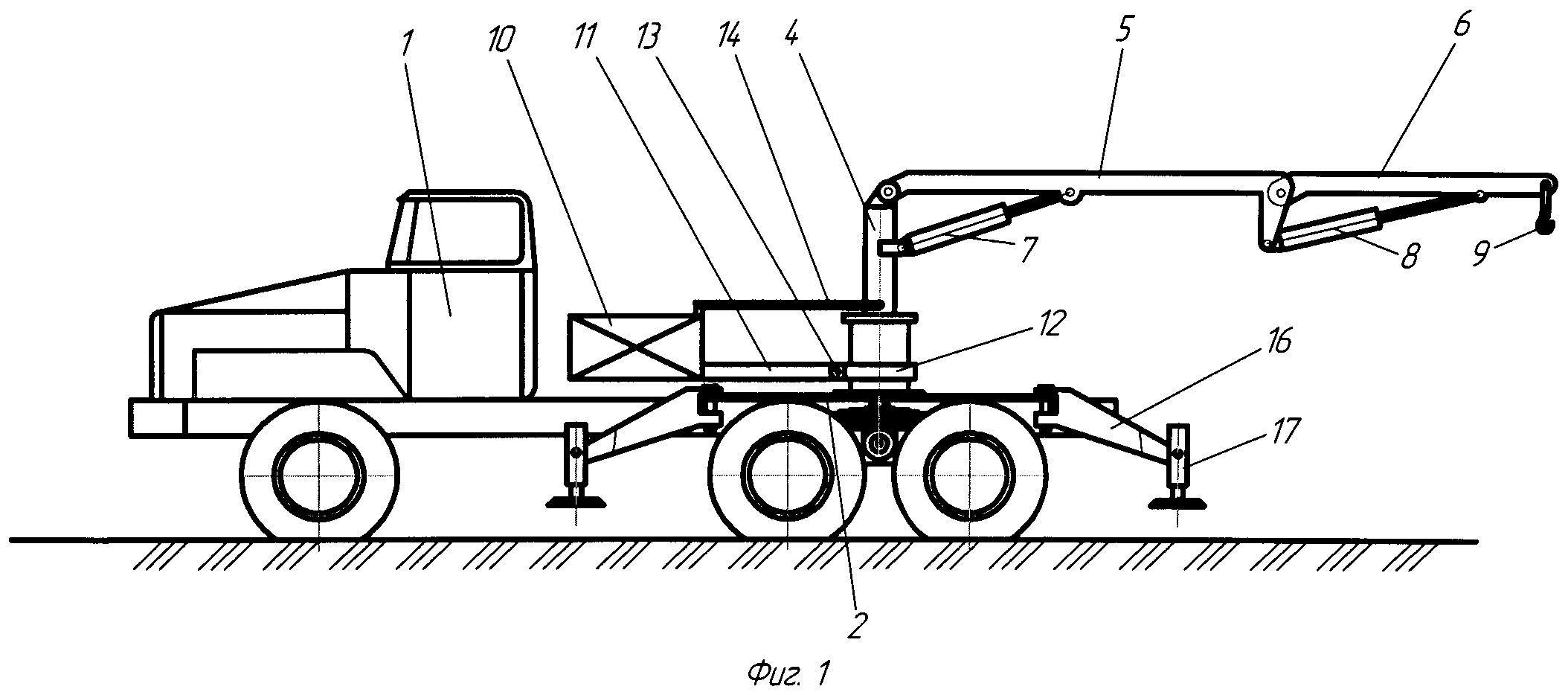
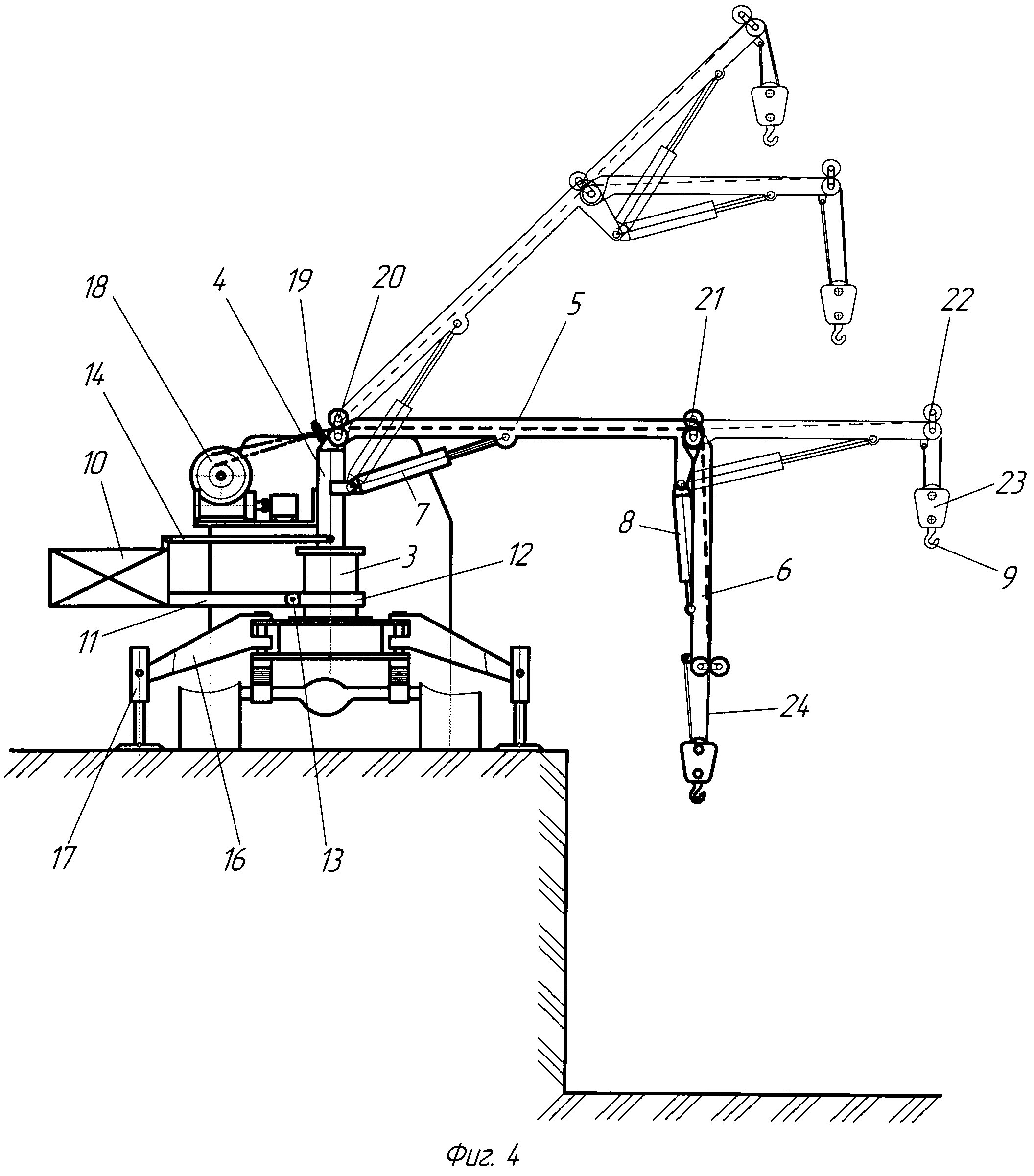
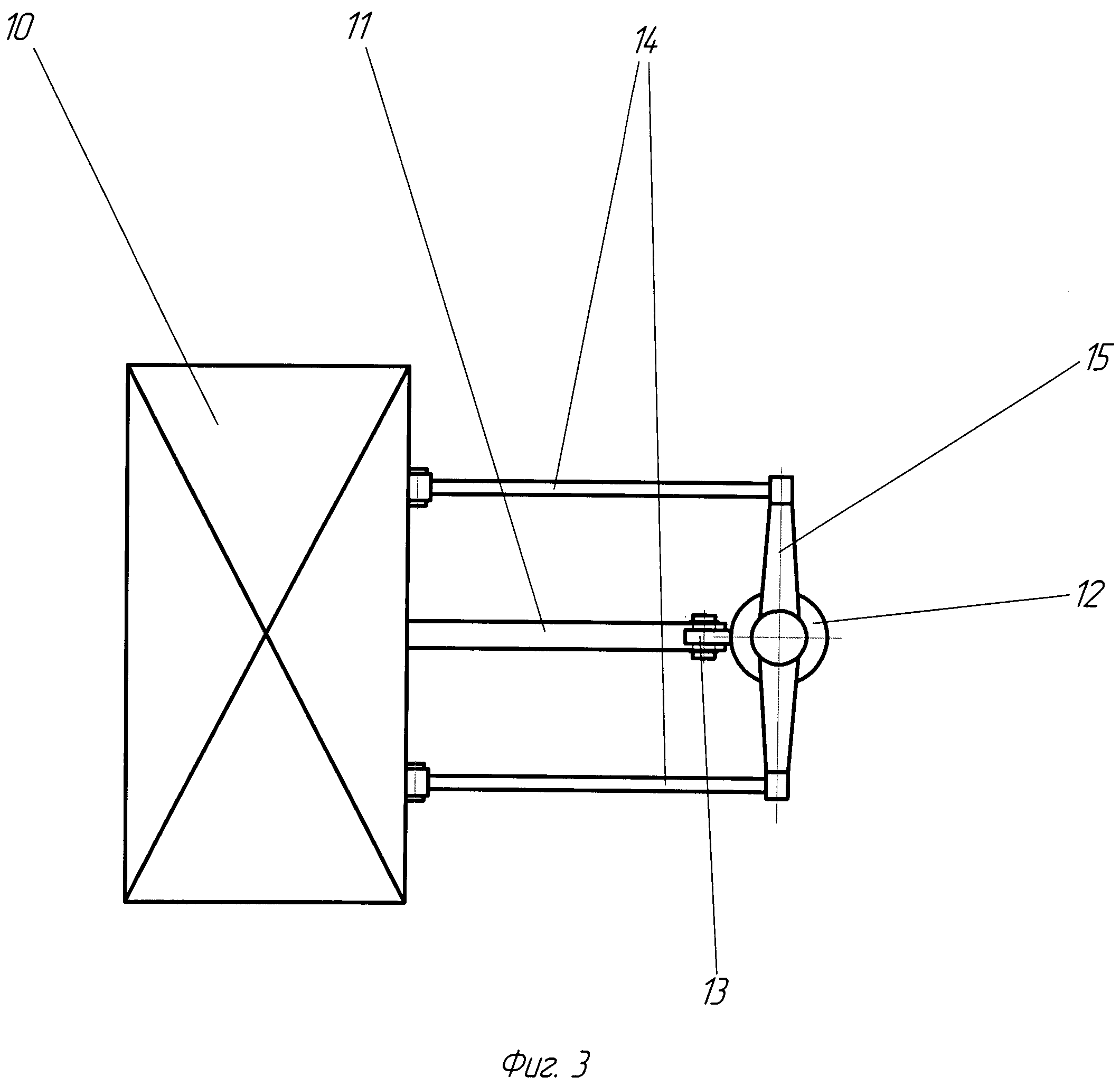
На фиг.1 показан общий вид первого варианта изобретения в транспортном положении; на фиг.2 кран-манипулятор в рабочем положении - первый вариант изобретении; на фиг.3 - вид сверху на противовес; на фиг.4 - второй вариант изобретения крана-манипулятора в рабочем положении.
Кран-манипулятор первого варианта изобретения содержит: шасси грузового автомобиля 1, раму крана 2, основание крана 3, поворотную колонну 4, первую и вторую секции стрелы 5, 6; гидроцилиндры секций 7, 8; крюк 9; противовес 10; кронштейн противовеса 11; кольцо кронштейна 12; шарнир противовеса 13; тягу противовеса 14; кронштейн тяг 15 (фиг.3); кронштейн выносной опоры 16; гидроцилиндр выносной опоры 17.
Кран-манипулятор второго варианта исполнения (фиг.4) дополнительно содержит грузовую лебедку 18, направляющие ролики для каната 19, направляющие сдвоенные канатные блоки 20, 21, 22, грузовой полиспаст 23 с крюком 9 и канатами 24.
Кран-манипулятор первого варианта выполнения работает следующим образом.
На фиг.2 показана работа крана-манипулятора в глубоком котловане. Выносные опоры 17 крана опущены на опорную поверхность, секции стрелы 5, 6 крана и противовес 10 расположены перпендикулярно продольной оси автомобиля.
Секция 6 стрелы установлена в вертикальное положение при помощи гидроцилиндра 8. Для опускания крюка 9 включают гидроцилиндр 7 на втягивание штока. Нижнее положение крюка 9 достигается работой обоих гидроцилиндров 7, 8.
Подъем груза выполняют путем поочередного включения гидроцилиндров 7 и 8 на выдвижение штоков.
При подъеме груза на крюке 9 во всех случаях работает противовес. Сила тяжести груза противовеса 10 создает удерживающий момент, который при помощи тяг 14 передается поворотной колонне 4 и обеспечивает уравновешивание сил тяжести секций стрелы и груза.
Одновременно предложенная конструкция обеспечивает разгрузку подшипников поворотного механизма, расположенных в основании 3 поворотной колонны.
Вращение поворотной колонны 4 происходит синхронно при помощи тяг 14 и рычагов 15, при этом кольцо 12 свободно поворачивается относительно основания 3.
Тяги 14 противовеса обеспечивают передачу части уравновешивающего момента поворотной колонне. Следовательно, противовес выполняет функцию обеспечения общей устойчивости крана и уравновешивание поворотной колонны с целью разгрузки подшипников поворотного механизма крана.
Второй вариант выполнения изобретения работает следующим образом. На фиг.4 первая секция стрелы устанавливается в горизонтальное положение гидроцилиндром 7, а секция 6 - в вертикальное положение гидроцилиндром 8. Для опускания крюка 9 в нижнее положение включают барабан грузовой лебедки 18 на сматывание каната.
Под действием силы тяжести грузового полиспаста 23 происходит опускание крюка 9 и последующий захват груза. Для подъема груза крюком 9 включают грузовой барабан лебедки для наматывания каната. Окончательный подъем и доставку груза на укладку производят последовательными включениями гидроцилиндров 7, 8. Работа противовеса во втором варианте выполнения осуществляется аналогично первому варианту.
Предложенное устройство решает задачу усовершенствования конструкции крана-манипулятора, повышения его эффективности и производительности.
Динамическая бронезащита танка (варианты)
Устройство гидроцилиндра стрелы погрузчика
Способ черпания материалов и грунтов ковшом фронтального погрузчика
Способ уравновешивания сил тяжести рабочего оборудования стреловых машин и устройство для его осуществления
Способ уравновешивания сил тяжести рабочего оборудования стреловых машин
Кран-манипулятор на грузовом автомобиле
Способ бронезащиты пневмоколес транспортного средства на примере бронетранспортера
Энергосберегающее устройство рабочего оборудования стреловой машины
Энергосберегающее устройство
Кран-стрела
Динамическая бронезащита танка (варианты)
Устройство гидроцилиндра стрелы погрузчика
Способ черпания материалов и грунтов ковшом фронтального погрузчика
Способ уравновешивания сил тяжести рабочего оборудования стреловых машин и устройство для его осуществления
Способ уравновешивания сил тяжести рабочего оборудования стреловых машин
Кран-манипулятор на грузовом автомобиле
Способ бронезащиты пневмоколес транспортного средства на примере бронетранспортера
Энергосберегающее устройство рабочего оборудования стреловой машины
Энергосберегающее устройство
Кран-стрела

