Результат интеллектуальной деятельности: КРАН-МАНИПУЛЯТОР НА ГРУЗОВОМ АВТОМОБИЛЕ
Вид РИД
Изобретение
Изобретение относится к строительным кранам, а именно к кранам-манипуляторам на грузовых автомобилях для выполнения эвакуационных работ на дорогах в гористой местности с ограниченной шириной проезжей части.
Известен бортовой кран-манипулятор на грузовом автомобиле для выполнения погрузочных и разгрузочных работ (см. книгу: Строительные машины: Справочник: в 2 т. Т.1: Машины для строительства промышленных, гражданских сооружений и дорог. Под общей ред. Э.Н. Кузина. - 5-е изд. перераб. - М.: Машиностроение, 1991, С.225-227) [1]. Известный кран-манипулятор [1] включает грузовой автомобиль, поворотную колонну крана, стрелу, содержащую основную и дополнительную секции, гидроцилиндры управления секциями стрелы, поворотный механизм вращения колонны крана, выносные опоры.
Недостатком крана-манипулятора является малая устойчивость поворотной колонны вследствие отсутствия противовеса и малый вылет грузового крюка, закрепленного на оголовке стрелы.
Известен короткобазовый кран на специальном двухосном шасси, предназначенный для выполнения погрузочных и разгрузочных работ (см. книгу: Пневмоколесные и гусеничные краны. С.П. Епифанов, В.И. Поляков. - М.: Высшая школа, 1985. - С.190-191) [2].
Известная конструкция [2], использованная в качестве прототипа, содержит базовое шасси, опорно-поворотное устройство, на котором смонтирована телескопическая стрела с гидроцилиндром подъема стрелы, крюковую обойму, грузовую лебедку, противовес, поворотную платформу, выносные опоры.
Недостатком известного устройства [2] является ограниченный радиус действия крюка и малая устойчивость при отклонении крюковой обоймы с грузом от вертикального положения. Большая сложность конструкции, обусловленная наличием специального шасси малосерийного исполнения, сложная телескопическая стрела, являются недостатками устройства [2]. Основным недостатком известных устройств [1, 2], а также других известных кранов, является неспособность воспринимать боковые нагрузки при отклонении крюка от вертикального отвесного положения. Боковые нагрузки на крюке крана способствуют его опрокидыванию.
Задачей заявляемого изобретения является придание крану-манипулятору, смонтированному на грузовом автомобиле, свойств, обеспечивающих способность воспринимать на крюке боковые силы, параллельные откосу насыпи автомобильной дороги в гористой местности с ограниченной шириной проезжей части.
Поставленная задача решена таким образом, что кран-манипулятор на грузовом автомобиле содержит базовое шасси грузового автомобиля, неподвижное основание крана, поворотную колонну крана, секции стрелы, гидроцилиндры управления секциями стрелы, крюковую обойму, грузовую лебедку, противовес, механизм выносных опор крана, поворотный механизм колонны крана, согласно заявленному изобретению противовес крана выполнен в виде рычага и груза, закрепленных на отдельной поворотной колонке на раме крана с возможностью поворота и фиксации в транспортном, левом и правом рабочих положениях; выносные опоры крана содержат гидроцилиндр и кронштейн, выполненные с возможностью опирания стрелы крана в нижнем рабочем положении на кронштейн выносной опоры.
Другими словами, задача решена путем доработки конструкции противовеса, который в данном изобретении не связан с поворотной колонной стрелы крана, а установлен при помощи поворотной колонки на раме крана. При этом в транспортном положении, а также левом и правом рабочих положениях противовес устанавливают и фиксируют на раме крана при помощи проушин и штыря.
Такой способ установки противовеса в транспортном и рабочем положениях является благоприятным для крана, вследствие значительной его массы по сравнению со случаем крепления его на поворотной колонне крана вместе с грузовой лебедкой.
Кроме этого доработка выносных опор крана-манипулятора придает крану возможность опирания стрелы крана в нижнем положении на кронштейн выносной опоры и придает крану-манипулятору новое качество, позволяющее воспринимать боковые нагрузки при помощи крюка крана-манипулятора, необходимые для подтягивания с помощью каната грузовой лебедки объектов, находящихся на удалении от крана.
Технический результат заявляемого изобретения достигается благодаря уменьшению до минимума плеча опрокидывающего момента от действия боковой тяговой силы в канате и создания с помощью противовеса и выносных опор значительного уравновешивающего момента крана-манипулятора.
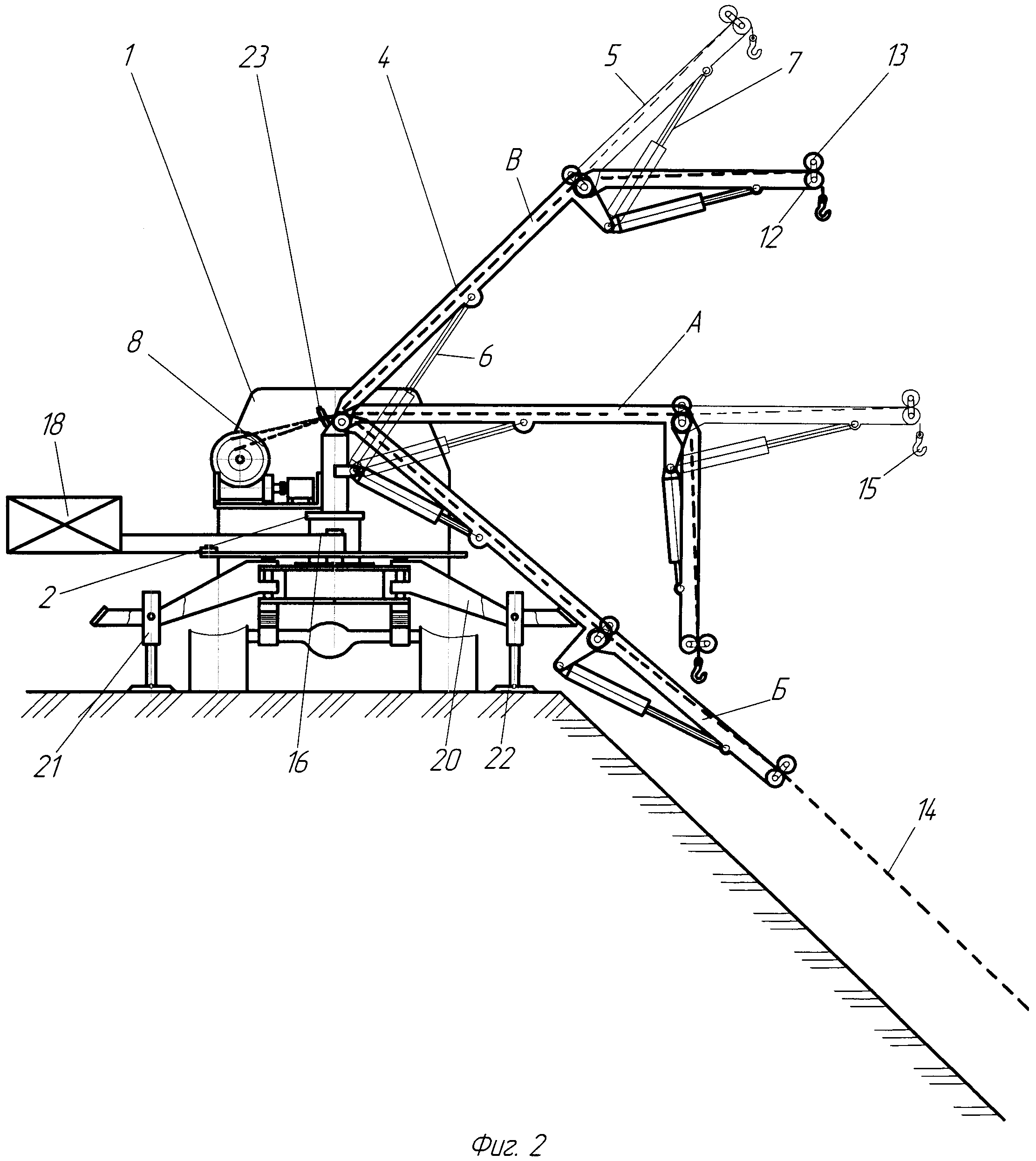
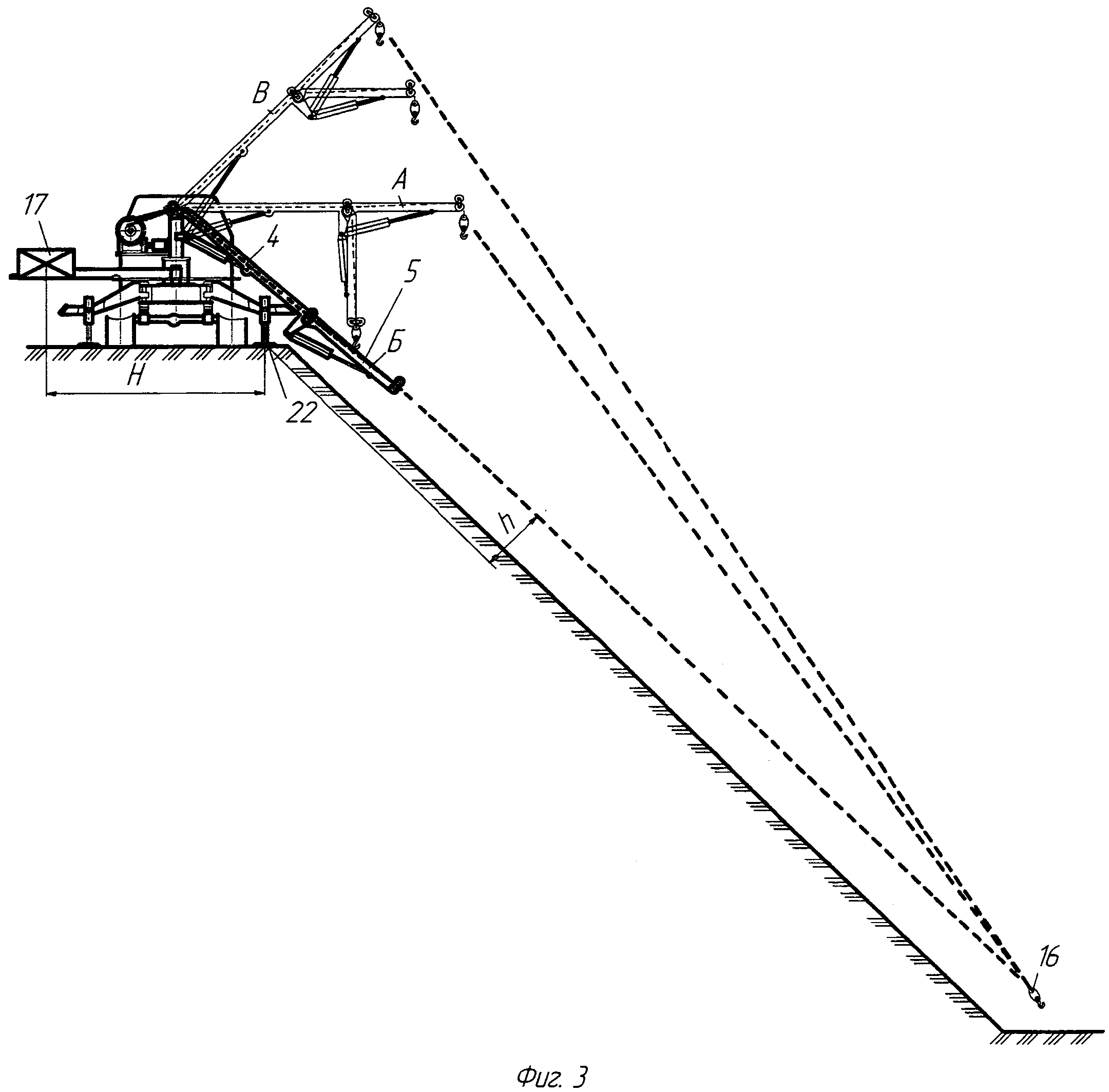
Заявляемое изобретение поясняется чертежами. На фиг.1 показан общий вид крана-манипулятора сбоку в транспортном положении; на фиг.2 - общий вид крана-манипулятора в рабочем положении; на фиг.3 показана работа крана-манипулятора на крутом откосе.
Кран-манипулятор на грузовом автомобиле содержит: шасси автомобиля 1; неповоротное основание 2 колонны крана; поворотную колонну 3; первую секцию стрелы 4; вторую секцию стрелы 5; гидроцилиндры 6, 7 управления первой и второй секциями; грузовую лебедку 8; направляющие ролики 9; направляющие блоки 10, 11, 12, 13, 14, 15; крюк 16 с канатом и добавочным грузом; противовес 17 с кронштейном; поворотную колонку 18 противовеса; опорную рамку 19 противовеса; проушину 20 для фиксации противовеса в транспортном положении; кронштейн выносной опоры 21; тарелку 22 выносной опоры; гидроцилиндр 23 выносной опоры; проушину 24 для фиксации противовеса в рабочем положении (фиг.2).
На фиг.2 дополнительно обозначены буквами А, Б, В положения крана: А - горизонтальное положение первой секции стрелы крана; Б - рабочее положение стрелы крана, параллельное откосу дороги; В - максимально поднятое положение первой секции стрелы. На фиг.3 дополнительно показаны размеры h и Н, которые обозначают: h - плечо силы в канате относительно ребра опрокидывания; Н - плечо силы тяжести противовеса.
Кран-манипулятор на грузовом автомобиле работает следующим образом.
На фиг.1 изображен кран-манипулятор после выполнения транспортного цикла перемещения к месту работы. Для приведения его в рабочее положение стрелу крана переводят в положение А, показанное на фиг.2. После этого убирают фиксатор из проушин 20 (см. фиг.1) и поворачивают противовес в положение вдоль стрелы, показанное на фиг.2.
Противовес 17 опирается на дополнительную опорную раму 19 и свободно установлен на поворотной колонке 18 с возможностью вращения вокруг вертикальной оси и фиксации в трех положениях: транспортном и рабочих положениях - левом и правом.
Рабочее положение противовеса фиксируют установкой фиксатора в проушине 24 (фиг.2). Выносные кронштейны 21 с гидроцилиндрами 23 устанавливают в рабочее положение, показанное на фиг.2, производят опирание секции стрелы 4 на рычаг 21 выносной опоры (положение Б). После опирания стрелы на кронштейн выносной опоры образуется жесткая конструкция, которая опирается на тарелку 22 выносной опоры. Крюк 16 с канатом вытягивают в исходное положение для захвата подтягиваемого объекта (фиг.3).
В положении, показанном на фиг.3, сила в канате создает опрокидывающий момент крана-манипулятора относительно точки опоры в тарелке 22 на минимальном плече h. При этом груз противовеса 17 создает удерживающий момент на максимальном плече H. Таким образом в положении, показанном на фиг.3, кран-манипулятор подтягивает к себе при помощи крюка 16 удаленные объекты. Подтягивание объектов крюком 16 осуществляют включением грузовой лебедки 8 для наматывания каната на барабан грузовой лебедки 8.
При подтягивании объектов крюком 16 секция 5 стрелы при помощи гидроцилиндра 7 обеспечивает дополнительные движения с целью уменьшения сил трения и создания дополнительных активных сил.
После подтягивания объекта к проезжей части дороги кран-манипулятор производит его погрузку на собственное шасси или рядом стоящие платформы.
Разработанная конструкция крана-манипулятора обеспечивает подтягивание объектов с обочин дорог к проезжей части для последующей транспортировки.
Кран-манипулятор, содержащий грузовой автомобиль, неподвижное основание колонны, поворотную колонну, секции стрелы, гидроцилиндры управления секциями, крюковую обойму, грузовую лебедку, противовес, механизм выносных опор, поворотный механизм крана, отличающийся тем, что противовес крана выполнен в виде рычага и груза, закрепленных на отдельной поворотной колонке на раме крана с возможностью фиксации в транспортном, левом или правом рабочих положениях; выносные опоры крана, содержащие гидроцилиндр и кронштейн, выполнены с возможностью опирания стрелы крана в нижнем рабочем положении на кронштейн выносной опоры.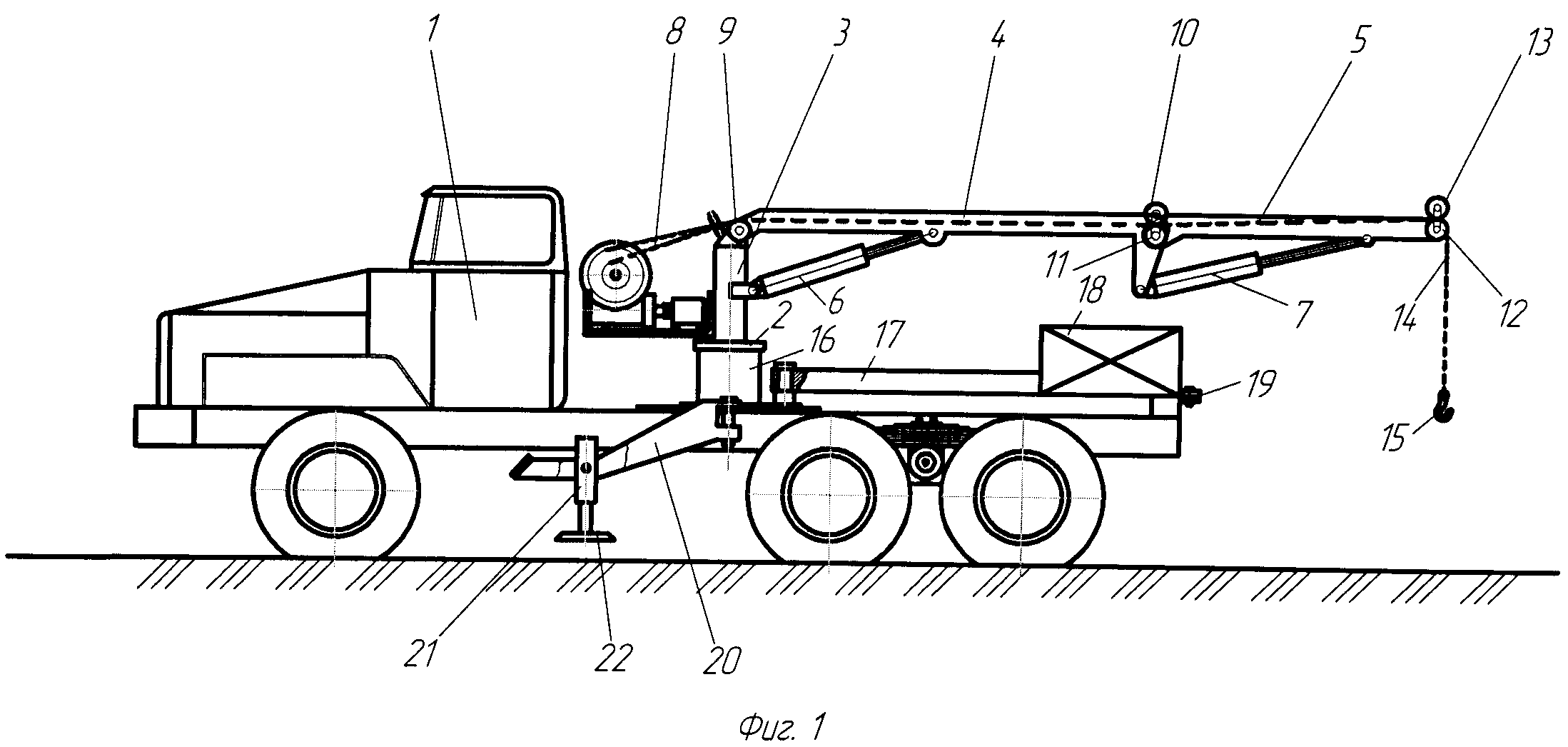
Динамическая бронезащита танка (варианты)
Устройство гидроцилиндра стрелы погрузчика
Способ черпания материалов и грунтов ковшом фронтального погрузчика
Способ уравновешивания сил тяжести рабочего оборудования стреловых машин и устройство для его осуществления
Способ уравновешивания сил тяжести рабочего оборудования стреловых машин
Кран-манипулятор (варианты)
Способ бронезащиты пневмоколес транспортного средства на примере бронетранспортера
Энергосберегающее устройство рабочего оборудования стреловой машины
Энергосберегающее устройство
Кран-стрела
Динамическая бронезащита танка (варианты)
Устройство гидроцилиндра стрелы погрузчика
Способ черпания материалов и грунтов ковшом фронтального погрузчика
Способ уравновешивания сил тяжести рабочего оборудования стреловых машин и устройство для его осуществления
Способ уравновешивания сил тяжести рабочего оборудования стреловых машин
Кран-манипулятор (варианты)
Способ бронезащиты пневмоколес транспортного средства на примере бронетранспортера
Энергосберегающее устройство рабочего оборудования стреловой машины
Энергосберегающее устройство
Кран-стрела

