Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЖИДКОСТНОЙ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ ПОСЛЕ КОМАНДЫ НА ВЫКЛЮЧЕНИЕ МАРШЕВОГО ДВИГАТЕЛЯ ОТРАБОТАВШЕЙ СТУПЕНИ
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике, а именно к способам управления движением жидкостных ракет космического назначения (РКН) на участке полета после команды на выключение установленного в карданном подвесе маршевого двигателя (МД) отработавшей ступени РКН и до отделения этой ступени.
В ракетной технике известен выбранный в качестве прототипа способ управления движением жидкостной РКН после команды на выключение МД отработавшей ступени, заключающийся в переводе МД на режим пониженной тяги и окончательном выключении МД путем прекращения подачи компонентов топлива в его камеру сгорания [1].
Недостатком данного способа является то, что при его реализации на РКН действует возмущающий момент, который может привести к закрутке РКН вокруг продольной оси. Этот момент обусловлен торможением вращающихся частей турбонасосного агрегата (ТНА) и увлекаемой ими массы компонентов топлива.
Для парирования возмущающих моментов по крену на РКН тандемной компоновки с одним маршевым двигателем обычно используются дополнительные рулевые двигатели или выносные газовые сопла крена, газ для которых вырабатывает газогенератор МД. Однако эффективность газовых сопел прямо пропорциональна тяге маршевого двигателя и к моменту времени, когда происходит остановка вращающихся частей ТНА, а РКН набирает свою максимальную угловую скорость по крену, газовые сопла оказываются уже неэффективными и не могут парировать вызванное возмущениями вращение РКН вокруг продольной оси. Поэтому, учитывая систематический характер указанного возмущения, противодействующий ему момент от газовых сопел необходимо создавать заранее.
Задачей предложенного изобретения является разработка способа управления движением РКН после команды на выключение МД отработавшей ступени, обеспечивающего парирование возмущающего момента, обусловленного торможением вращающихся частей ТНА и тем самым предотвращающего нежелательную закрутку РКН по крену, которая в сочетании с другими неблагоприятными условиями может привести к «складыванию» рамок гиростабилизированной платформы и аварийному прекращению полета РКН.
Техническим результатом предлагаемого изобретения является повышение безопасности полета РКН.
Указанный технический результат достигается тем, что в способе управления движением жидкостной РКН после команды на выключение МД отработавшей ступени, включающем перевод МД на режим пониженной тяги и окончательное выключение МД путем прекращения подачи компонентов топлива в его камеру сгорания, в соответствии с изобретением, в случае, когда управление движением РКН по крену осуществляется с помощью двух пар газовых сопел, газ для которых вырабатывает газогенератор МД, вначале осуществляют прогноз момента времени (t0) окончательного выключения МД, заранее, за промежуток времени (Δt) до спрогнозированного момента времени (t0) окончательного выключения МД включают одну из пар газовых сопел, создающую управляющий момент по крену, знак которого противоположен знаку угловой скорости вращения ротора ТНА, затем выключают указанную пару газовых сопел в спрогнозированный момент времени (t0), при этом величину промежутка времени (Δt) работы этой пары газовых сопел определяют перед началом полета ракеты по формуле  , где IP - момент инерции вращающейся части ТНА с учетом присоединенной массы компонентов топлива относительно оси вращения,MX - абсолютная величина момента по крену, создаваемого каждой парой газовых сопел при их включении, Ω - абсолютная величина угловой скорости вращения ротора ТНА на режиме пониженной тяги, φ - угол между осью вращения ротора ТНА и продольной осью РКН.
, где IP - момент инерции вращающейся части ТНА с учетом присоединенной массы компонентов топлива относительно оси вращения,MX - абсолютная величина момента по крену, создаваемого каждой парой газовых сопел при их включении, Ω - абсолютная величина угловой скорости вращения ротора ТНА на режиме пониженной тяги, φ - угол между осью вращения ротора ТНА и продольной осью РКН.
Сущность предлагаемого изобретения иллюстрируется фиг.1.
Фиг.1 - типичные зависимости параметров углового движения РКН от времени после команды на выключение МД.
В качестве примера рассмотрим возможную реализацию предлагаемого способа управления на РКН легкого класса типа корейской ракеты «КСЛВ-I». Камера сгорания маршевого двигателя I ступени этой РКН установлена в карданном подвесе. Управление движением РКН по тангажу и рысканию осуществляется путем отклонения камеры с помощью двух электрогидравлических сервоприводов. Для управления движением по крену используются 4 газовых сопла, которые включаются попарно. В конце работы I ступени система управления подает команду на выключение ее МД, после чего двигатель переводится на режим пониженной тяги (на конечную ступень тяги - КСТ), составляющей 38% от номинальной. На этом режиме еще возможно управление движением РКН по тангажу и рысканию путем отклонения камеры сгорания МД. В канале крена на режиме КСТ используются газовые сопла, хотя и с пониженной эффективностью. Ротор ТНА, подающего компоненты топлива в камеру сгорания, на режиме КСТ вращается с угловой скоростью Ω≈12600 об/мин, угол между осью вращения ротора и продольной осью РКН составляет φ=6°. Вращающиеся части ТНА обладают моментом импульса (кинетическим моментом), проекция которого на продольную ось РКН равна K1=IPΩcosφ, где IP - момент инерции вращающейся части ТНА относительно оси вращения с учетом присоединенной массы компонентов топлива (массы компонентов между лопатками насосов горючего и окислителя), приблизительно равный 0,375 кг·м2.
После окончательного выключения МД прекращается подача компонентов топлива в камеру сгорания. Угловая скорость вращения ротора ТНА приблизительно за 0,9 с падает до нуля. По закону сохранения момента импульса замкнутой системы РКН-ТНА ракета при этом приобретет момент импульса относительно продольной оси, равный K2=IXωХ0, где IX - момент инерции РКН относительно продольной оси, приблизительно равный 16500 кг·м2 в конце работы маршевого двигателя I ступени. При этом K2=K1, т.е. РКН начнет вращаться вокруг продольной оси с угловой скоростью
Для указанных числовых значений параметров угловая скорость вращения составит около 1,7 гр/с. Для погашения этой угловой скорости необходимо включение одной из двух пар газовых сопел, а именно той, которая создает управляющий момент по крену, знак которого противоположен знаку угловой скорости вращения ТНА. Эта пара газовых сопел должна быть включена на время

где MX - абсолютная величина момента по крену, создаваемого каждой парой газовых сопел при их включении (MX≈114 кг·м при работе МД на режиме пониженной тяги). Для указанных значений параметров время включения пары сопел составит Δt≈0,44 с.
Поэтому, в соответствии с предлагаемым способом управления для предотвращения нежелательного вращения РКН по крену, предлагается перед началом полета по формуле (2) определить длительность промежутка времени Δt, в течение которого должна работать пара газовых сопел. В полете, в конце работы I ступени осуществляется прогноз момента времени t0 окончательного выключения двигателя. Такой прогноз может быть выполнен либо на основе информации, поступающей в систему управления от датчиков уровней окислителя и горючего, установленных в баках ракеты и позволяющих определить массу оставшихся компонентов топлива, либо на основе сравнения текущих значений траекторных параметров (скорости, высоты и т.д.) с их программными значениями (способ осуществления прогноза зависит от принятых принципов работы системы наведения ракеты). После того как момент времени t0 окончательного выключения МД спрогнозирован, заранее, за промежуток времени Δt до момента времени t0 в соответствии с предлагаемым способом управления включают одну из пар газовых сопел, создающую управляющий момент необходимого знака (противоположного знаку угловой скорости вращения ТНА). Выключают эту пару газовых сопел в момент времени t0.
На фиг.1 представлены результаты математического моделирования углового движения РКН в канале крена, начиная с момента включения пары сопел крена. Показаны:
- зависимость от времени угловой скорости вращения ротора ТНА Ω·0.001, рад/с;
- зависимость от времени угловой скорости вращения РКН по крену (вокруг продольной оси) ωX, гр/с;
- зависимость от времени угла крена РКН γ, гр;
- зависимость от времени команды на включение одной из пар газовых сопел u (u принимает значения -1, 0, +1. u=-1 означает, что включена пара газовых сопел, создающая отрицательный момент по крену, u=0 означает, что газовые сопла выключены). Из фиг.1 видно, что предлагаемый способ управления уже через 1,4 с после включения газовых сопел сводит угловую скорость ωX практически к 0, при этом абсолютная величина угла крена γ РКН не превосходит 1,1°.
Таким образом, благодаря реализации предложенного в изобретении технического решения, решается задача парирования возмущающего момента, обусловленного торможением вращающихся частей ТНА, и достигается технический результат предлагаемого изобретения - повышение безопасности полета РКН.
Источники информации
1. В.И. Феодосьев. Основы техники ракетного полета. М.: «Наука», 1981 г., с.139.
Способ управления движением жидкостной ракеты космического назначения после команды на выключение маршевого двигателя отработавшей ступени, включающий перевод маршевого двигателя на режим пониженной тяги и окончательное выключение маршевого двигателя путем прекращения подачи компонентов топлива в его камеру сгорания, отличающийся тем, что в случае, когда управление движением ракеты по крену осуществляется с помощью двух пар газовых сопел, газ для которых вырабатывает газогенератор маршевого двигателя, вначале осуществляют прогноз момента времени (t) окончательного выключения маршевого двигателя, заранее, за промежуток времени (Δt) до спрогнозированного момента времени (t) окончательного выключения маршевого двигателя включают одну из пар газовых сопел, создающую управляющий момент по крену, знак которого противоположен знаку угловой скорости вращения ротора турбонасосного агрегата, затем выключают указанную пару газовых сопел в спрогнозированный момент времени (t), при этом величину промежутка времени (Δt) работы этой пары газовых сопел определяют перед началом полета ракеты по формуле , где I - момент инерции вращающейся части турбонасосного агрегата с учетом присоединенной массы компонентов топлива относительно оси вращения, M - абсолютная величина момента по крену, создаваемого каждой парой газовых сопел при их включении, Ω - абсолютная величина угловой скорости вращения ротора турбонасосного агрегата на режиме пониженной тяги, φ - угол между осью вращения ротора турбонасосного агрегата и продольной осью ракеты.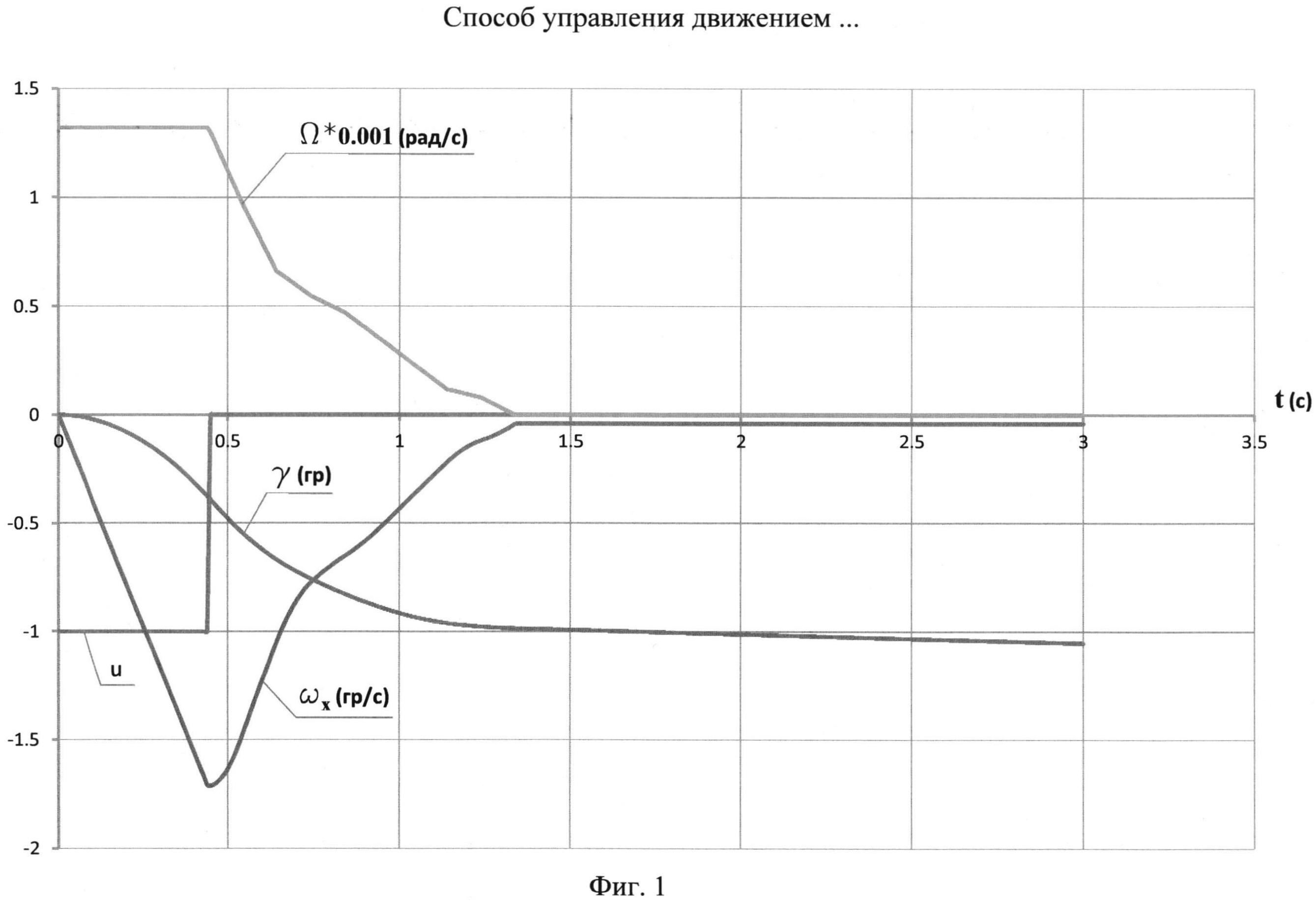
Лопастной насос
Способ ориентации в пространстве осей связанной системы координат космического аппарата
Адаптер в виде сетчатой оболочки вращения конической формы из полимерных композиционных материалов
Сосуд давления, способ сварки его металлической оболочки и способ получения заданного сечения корневой части сварного соединения его металлической оболочки
Способ ориентации осей космического аппарата в солнечно-орбитальную систему координат
Способ испытания изделий незамкнутой конфигурации на прочность
Международная аэрокосмическая система глобального мониторинга (максм)
Силовая обечайка изделий, работающих при криогенных температурах
Устройство межблочной кабельной связи ракеты
Устройство для отделения сбрасываемого отсека от основного изделия
Способ управления программным разворотом разгонного блока
Способ автономной навигации для объекта космического назначения
Способ компенсации потери тяги двигателями ориентации разгонного блока
Стенд гидравлического канала связи

