Результат интеллектуальной деятельности: СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ
Вид РИД
Изобретение
Изобретение относится к радиосредствам обмена данными и может быть использовано для высокоскоростного информационного обмена между подвижными воздушными объектами (ВО) и наземными комплексами (НК) в каналах «воздух-земля».
В настоящее время за рубежом широко применяется система обмена сообщениями между бортовым радиоэлектронным оборудованием подвижных воздушных объектов (самолетов) и наземными службами (ACARS) [1]. В системе обеспечивается вызов на речевую связь и передача данных между подвижными воздушными объектами и наземными службами. Бортовой блок связи в этой системе представляет собой вычислитель. Основным каналом обмена текущей информации является канал метрового (MB) диапазона. Организацию обмена информацией между наземными службами и бортовыми системами осуществляет наземный комплекс. Он опрашивает подвижные воздушные объекты, находящиеся в зоне его обслуживания, собирает с них необходимую информацию и отображает ее на экране монитора рабочего места оператора. Бортовая система работает в этом случае в режиме адресного опроса. Для того чтобы бортовая система могла работать в режиме адресного опроса, ей необходимо встать на обслуживание в наземной системе в режиме прямого доступа [2].
К недостаткам представленной системы обмена сообщениями между бортовым радиоэлектронным оборудованием ВО и наземными службами следует отнести большой объем информации, выводимый на экран монитора, что затрудняет действия оператора.
Известна система радиосвязи с подвижными объектами [3], которая состоит из наземной и бортовой приемопередающих радиостанций, между которыми в соответствии с заложенными алгоритмами осуществляется обмен данными. В этой системе во время движения подвижные воздушные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом. Принимаемые наземной радиостанцией из канала "воздух-земля" сообщения через аппаратуру передачи данных поступают в вычислитель автоматизированного рабочего места (АРМ) на базе ПЭВМ, где в соответствии с принятым в системе протоколом обмена производится идентификация принятого в сообщении адреса с адресами подвижных воздушных объектов, хранящимися в памяти их бортовых вычислителей. При совпадении адреса подвижного воздушного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения подвижных воздушных объектов и состоянии их многочисленных датчиков выводится на один экран монитора наземного АРМ. В вычислителе АРМ на базе ПЭВМ решается задача обеспечения постоянной радиосвязи со всеми N ВО. При выходе за пределы радиогоризонта хотя бы одного из ВО или приближении к границе зоны устойчивой радиосвязи определяется программно один из ВО, который назначается ретранслятором сообщений. По результатам анализа местоположения и параметров движения остальных ВО определяются оптимальные пути доставки сообщений удаленному от НК за радиогоризонт выбранному подвижному воздушному объекту. Сообщение от НК через последовательную цепочку, состоящую из (N-1) воздушных объектов, может быть доставлено N-му ВО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладываются номер ВО, назначенного ретранслятором, и адреса подвижных воздушных объектов, обеспечивающих заданный трафик сообщения. Принятые на ВО сообщения анализируются в блоке анализа типа сообщений. После анализа решается вопрос о направлении данных по двунаправленной шине на систему управления объекта или ретрансляции их на соседний ВО.
В обычном режиме с НК, когда не требуется ретрансляция сигналов, осуществляется адресный опрос ВО путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение также отображается на экране монитора АРМ. На ВО после прохождения через бортовые антенну, радиостанцию, аппаратуру передачи данных сигнал поступает в бортовой вычислитель, где происходит идентификация принятого в сообщении адреса с собственным адресом подвижного воздушного объекта. Далее сообщение передается в блок анализа типа ретранслируемого сообщения, где происходит дешифрация полученного заголовка (служебной части) сообщения и определяется, в каком режиме должна работать аппаратура ВО. Информационная часть сообщения записывается в память бортового вычислителя и при необходимости выводится на экран блока регистрации данных.
Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу "воздух-земля" взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на блоке регистрации данных ВО и мониторе АРМ НК соответственно. Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем записываются в память наземного и бортового вычислителей с привязкой к глобальному времени и используются для расчета навигационных характеристик и параметров движения каждого ВО. Принятые на НК навигационные сообщения от всех ВО обрабатываются в вычислителе и выводятся на экран монитора АРМ.
Однако аналогу присущи недостатки, связанные с загруженностью оператора АРМ, наблюдающего за обслуживаемыми ВО и различными всплывающими окнами, вследствие чего снижается его работоспособность.
Наиболее близким по назначению и большинству существенных признаков является система радиосвязи с подвижными объектами [4], которая и принята за прототип. Система состоит из наземного комплекса, содержащего наземную антенну, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных (АПД) к соответствующему первому входу/выходу вычислителя автоматизированного рабочего места (АРМ). Первый вход вычислителя АРМ подключен к приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ. Формирователь типа ретранслируемых сообщений соединен с соответствующим входом вычислителя АРМ. Концентратор подключен к локально-вычислительным сетям (ЛВС), которые в свою очередь соединены двухсторонними связями с соответствующими входами/выходами наземной направленной антенны, наземному антенному коммутатору, наземной аппаратуре связи, каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ. Каждый из В блоков сопряжения состоит из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, выход которого является входом/выходом системы. Наземная направленная антенна через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи. Наземный блок горизонтирования подключен к наземной направленной антенне механическими связями. В вычислителе АРМ в соответствии с принятым в системе протоколом обмена проводится идентификация принятого в сообщении адреса с адресами воздушных объектов, хранящимися в памяти вычислителя АРМ. При совпадении адреса воздушного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ВО и состоянии его датчиков, в том числе датчика с высокоскоростной информацией, выводится на экран монитора АРМ НК. В вычислителе АРМ решаются следующие задачи: прием-передача сигналов со второй наземной АПД; прием данных о фактическом положении ДНА наземной направленной антенны и состоянии наземной аппаратуры связи; формирование хронизирующих сигналов для переключения режимов «передача-прием» антенного коммутатора, сигналов управления: положением ДНА наземной направленной антенны по азимуту и углу места, наземным блоком горизонтирования, режимами работы ВО; прием, обработка и вывод на экран монитора АРМ сигналов контроля со всех радиоэлектронных узлов системы, сигналов с выхода наземного приемника сигналов навигационных спутниковых систем; прием-передача данных через блок сопряжения по шине потребителям информации; формирование на экране монитора АРМ картинки в соответствии с принятой с ВО информацией и вспомогательной информацией в виде графических линий, символов и других изображений; отображение квитанций и донесений о режимах работы ВО, НК, АРМ, слежение за местоположением всех ВО в зоне радиосвязи; обеспечение постоянной радиосвязи со всеми N ВО, оптимальное управление их движением; решение конфликтных ситуаций и выполнение других операций. Для удобства разрешения оператором НК конфликтной ситуации при наличии помеховой обстановки на экран каждого монитора АРМ НК может выводиться положение каждого ВО относительно НК. Для этого программно, с помощью вычислителя АРМ выделяются части пространства, в которых помеховая ситуация в вероятностном смысле менее напряженная, и через находящиеся там ВО осуществляется трафик. Для отображения тенденции движения каждого ВО на экране монитора АРМ вычислителем АРМ формируются отметки, характеризующие предыдущее местоположение ВО и экстраполяционные отметки, характеризующие местоположение ВО через заданный интервал времени. По мере движения ВО устаревающие отметки стираются. Точка, характеризующая местоположение НК 1, обычно размещается в центре экрана монитора 15 АРМ 30. ВО 2, находящиеся вблизи зоны устойчивой радиосвязи, выделяются от остальных, например, цветом отметки на экране монитора 15 АРМ, и для них в вычислителях 3 и 13 начинается решение задачи выбора оптимального пути трансляции управляющих сообщений от НК 1 на выбранный ВО 2.
Набираемое оператором (диспетчером) сообщение для ВО и принятые данные также отображаются на экране монитора АРМ. Принятые на НК навигационные сообщения от всех ВО обрабатываются в вычислителе и выводятся на экран монитора АРМ.
В состав каждого из N подвижных воздушных объектов входят бортовые датчики, приемник сигналов глобальных навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя. Выход бортового вычислителя подключен к входу блока регистрации данных, а вход/выход - к двунаправленной шине системы управления подвижным воздушным объектом. Бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне. Бортовая аппаратура связи, бортовая направленная антенна, бортовой антенный коммутатор, бортовой блок горизонтирования соединены двухсторонними связями с соответствующими входами/выходами бортового вычислителя. Бортовой блок горизонтирования подключен к бортовой направленной антенне механическими связями. Передача данных с НК обеспечивается по цепочке последовательно соединенных первого подвижного воздушного объекта, второго ВО и далее до N-го ВО, а передача данных с М-го ВО на НК осуществляется в обратном порядке. Бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, бортовую направленную антенну через эфир подключена к наземной направленной антенне. В режимах ретрансляции и обмена данными бортовая направленная антенна 1-го ВО соединена по эфиру с бортовой направленной антенной 2-го ВО и так далее до М-го ВО.
Прототипу присущи недостатки, которые постоянно отвлекают внимание оператора от анализа основной информации с высокоскоростного бортового датчика:
- на экране каждого монитора АРМ на передаваемые высокоскоростные данные с одного из бортовых датчиков, которые для оператора НК являются основными, постоянно накладываются всплывающие окна, которые сигнализируют об изменении местоположения, параметров движения всех ВО и состояния их датчиков;
- на том же экране монитора АРМ отображается набираемое оператором (диспетчером) сообщение для ВО и принятые навигационные сообщения от всех ВО;
- для отображения тенденции движения каждого ВО на экране монитора АРМ вычислителем АРМ формируются отметки, характеризующие предыдущее местоположение ВО и экстраполяционные отметки, характеризующие местоположение ВО через заданный интервал времени.
Таким образом, основной технической задачей, на решение которой направлено изобретение, является повышение производительности оператора АРМ наземного комплекса при съеме высокоскоростной информации с бортового датчика на воздушном подвижном объекте, за счет:
- введения второго монитора АРМ для отображения вспомогательной информации, который при неисправности первого монитора может выполнять все его функции;
- распределения основной (высокоскоростной) и вспомогательной информации на первый и второй мониторы соответственно;
- распределения основной (высокоскоростной) информации с выделенного ВО на несколько мониторов одновременно для более качественной обработки данных или сообщений с каждого ВО - на свой АРМ.
Указанный технический результат достигается тем, что в систему радиосвязи с подвижными объектами, состоящую из наземного комплекса (НК), содержащего наземную антенну, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных к соответствующему первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к первому монитору АРМ, формирователь типа ретранслируемых сообщений, соединенный с соответствующим входом вычислителя АРМ, концентратор, подключенный к локально-вычислительным сетям, которые в свою очередь подключены двухсторонними связями к соответствующим входам/выходам наземной направленной антенны, наземному антенному коммутатору, наземной аппаратуре связи, каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ, каждому из В блоков сопряжения, состоящих из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, вход/выход которого является входом/выходом системы, наземная направленная антенна через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи, наземный блок горизонтирования подключен к наземной направленной антенне механическими связями, в режимах ретрансляции и обмена данными бортовая направленная антенна 1-го подвижного воздушного объекта (ВО) соединена по эфиру с бортовой направленной антенной 2-го ВО и так далее до N-го ВО, N подвижных воздушных объектов, в состав каждого из которых входят бортовые датчики, приемник сигналов навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, выход которого подключен к входу блока регистрации данных, а вход/выход - к двунаправленной шине системы управления подвижным воздушным объектом, бортовая аппаратура связи, бортовая направленная антенна, бортовой антенный коммутатор, бортовой блок горизонтирования, каждый из которых соединен двухсторонними связями с соответствующими входами/выходами бортового вычислителя, бортовой блок горизонтирования подключен к бортовой направленной антенне механическими связями, бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, бортовую направленную антенну через эфир подключена к наземной направленной антенне, бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне, причем передача данных с НК обеспечивается по цепочке последовательно соединенных первого подвижного воздушного объекта, второго ВО и далее до N-го ВО, а передача данных с М-го ВО на НК осуществляется в обратном порядке, введен в НК распределитель данных, подключенный двухсторонними связями к локально-вычислительным сетям и второй монитор, соединенный с соответствующим выходом вычислителя АРМ.
На фигуре представлена система радиосвязи с подвижными объектами, где обозначено:
1 - наземный комплекс;
2 - воздушный объект;
3 - бортовой вычислитель;
4 - бортовые датчики;
5 - бортовой приемник сигналов навигационных спутниковых систем;
6 - блок регистрации данных;
7 - бортовая аппаратура передачи данных;
8 - бортовая радиостанция;
9 - бортовая антенна;
10 - наземная антенна;
11 - наземная радиостанция;
12 - наземная аппаратура передачи данных;
13 - вычислитель АРМ;
14 - наземный приемник сигналов навигационных спутниковых систем;
15 - первый монитор АРМ;
16 - пульт управления АРМ;
17 - анализатор типа принимаемых сообщений,
18 - двунаправленная шина системы управления воздушным объектом;
19 - бортовой формирователь типа ретранслируемых сообщений;
20 - формирователь типа ретранслируемых сообщений;
21 - бортовая аппаратура связи;
22 - бортовой антенный коммутатор;
23 - бортовая направленная антенна;
24 - бортовой блок горизонтирования;
25 - наземная направленная антенна;
26 - наземный блок горизонтирования;
27 - локально-вычислительные сети;
28 - антенный коммутатор;
29 - наземная аппаратура связи;
30 - автоматизированное рабочее место;
31 - одна из В вторых наземных АПД блока 33 сопряжения;
32 - устройство сопряжения с каналом связи;
34 - вход/выход системы;
35 - концентратор;
36 - распределитель данных;
37 - второй монитор АРМ.
Двойными сплошными линиями на фигуре обозначены механические связи. Вспомогательные элементы электропитания, контроля, записи, хранения информации и другие, не влияющие на выполнение цели изобретения, не включены в структурную схему системы.
Алгоритм работы системы заключается в ее адаптации к постоянно изменяющейся помеховой обстановке и взаимному положению НК 1 и всех ВО 2, находящихся в зоне обслуживания операторами наземного комплекса 1. Эта задача решена путем организации обмена данными между оборудованием подвижных воздушных объектов 2 и наземного комплекса 1 одновременно по двум радиоканалам: узкополосному MB диапазона и широкополосному с более высокой несущей частотой (выше 1,5 ГГц) направленному радиоканалам связи, распределения принятой информации на основную и вспомогательную (технологическую) и отображения вспомогательной информации на втором мониторе АРМ для освобождения внимания оператора от постоянно всплывающих окон на экране при смене режимов работы бортового оборудования, режимов полета ВО 2, изменения состояния его бортовых датчиков и других явлений.
Система радиосвязи с подвижными объектами работает следующим образом. При беспомеховой обстановке во время движения подвижные воздушные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом 1 в MB диапазоне. Принимаемые наземной радиостанцией 11 из канала "воздух-земля" сообщения через аппаратуру 12 передачи данных поступают в вычислитель 13 АРМ 30, построенный, например, на базе ПЭВМ серии «Багет». В вычислителе 13 АРМ 30 в соответствии с принятым в системе протоколом обмена проводится идентификация принятого в сообщении адреса с адресами воздушных объектов, хранящимися в памяти вычислителя 13 АРМ. В некоторых случаях НК 1 может обеспечивать обмен данными только с одним ВО. Тогда основная (высокоскоростная) информация выводится на экраны всех первых мониторов 15 АРМ. При совпадении адреса подвижного воздушного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ВО 2i, состоянии его датчиков и другие данные распределяются блоком 36 по соответствующим АРМ 30, а в них через вычислитель 13 АРМ - на первый или второй мониторы АРМ 15 или 37.
На экран первого монитора 15 выводятся только данные, необходимые оператору для осуществления качественной и своевременной обработки высокоскоростной информации:
- высокоскоростная информация с выбранного распределителем 36 данных ВО 2 на фоне электронной карты местности;
- курсор, привязанный к точным координатам электронной карты местности;
- граница зоны прямой (оптической) видимости между НК 1 и обслуживаемым ВО 2;
- местоположение обслуживаемого ВО 2 относительно НК 1 и тип работающего датчика высокоскоростной информации.
На экран второго монитора 37 выводятся данные, необходимые оператору для контроля параметров ВО 2 и НК 1:
- сигналы контроля работоспособности оборудования ВО 2 и НК 1;
- точные текущие координаты и параметры движения ВО 2;
- состояние датчиков обслуживаемого ВО 2, характеризующих, например, остаток горючего;
- отметки на электронной карте местности, характеризующие предыдущее местоположение обслуживаемого ВО 2 и экстраполяционные отметки, характеризующие местоположение ВО через заданный интервал времени;
- оценка качества каналов связи обслуживаемого ВО 2 и наличие источника помех;
- сообщения (сигналы телеуправления), набираемые оператором (диспетчером) с пульта 16 управления АРМ, для обслуживаемого подвижного воздушного объекта 2, например, команда смены используемого бортового датчика 6 высокоскоростной информации (при их наличии на борту ВО в количестве нескольких штук) и другие.
Для одновременного отображения нескольких данных для второго монитора 37 АРМ может быть выбран, например, многоэкранный режим.
В вычислителе 13 АРМ 30 решаются следующие задачи: прием-передача сигналов со второй наземной АПД 31, прием данных о фактическом положении ДНА наземной направленной антенны 25 и состоянии наземной аппаратуры 29 связи, формирование хронизирующих сигналов для переключения режимов «передача-прием» антенного коммутатора 28, сигналов управления: положением ДНА наземной направленной антенны 25 по азимуту и углу места, наземным блоком 26 горизонтирования, режимами работы ВО, прием и обработка сигналов контроля со всех радиоэлектронных узлов системы, сигналов с выхода наземного приемника 14 сигналов навигационных спутниковых систем, прием-передача данных через блок 33 сопряжения по шине 34 потребителям информации, формирование на экране мониторов 15 и 37 АРМ 30 картинок в соответствии с принятой с ВО 2 высокоскоростной информацией и вспомогательной информацией в виде графических линий, символов и других изображений, отображение квитанций и донесений о режимах работы ВО 2, НК 1, АРМ 30, распределение данных с ВО 2 с помощью блока 36 по соответствующим АРМ 30 и мониторам 15 и 37, переключение с помощью блоков 16 и 36 режима работы второго монитора в режим работы первого монитора 15 при выходе последнего из строя, слежение за местоположением всех ВО 2 в зоне радиосвязи, обеспечение постоянной радиосвязи с работающими ВО 2, оптимальное управление их движением, решение конфликтных ситуаций и выполнение других операций.
Бортовой вычислитель 3 осуществляет: прием-передачу сигналов с наземной НК 1; прием данных о фактическом положении ДНА бортовой направленной антенны 23 и состоянии бортовой аппаратуры 21 связи; формирование хронизирующих сигналов для переключения режимов «передача-прием» бортового антенного коммутатора 22, сигналов управления: положением ДНА бортовой направленной антенны 23 по азимуту и углу места, бортовым блоком 24 горизонтирования, режимами работы оборудования ВО; прием и обработку сигналов контроля со всех радиоэлектронных узлов ВО с передачей результата обработки на НК 1, сигналов с выхода бортового приемника 5 сигналов глобальных навигационных спутниковых систем; прием-передачу данных по шине 18 соответствующим потребителям информации; формирование на экране блока 6 регистрации данных картинки в соответствии с принятой с НК 1 информацией и вспомогательной информацией с узлов ВО 2 в виде графических линий, символов и других изображений; отображение команд управления с НК 1 режимами работы узлов ВО 2, слежение за местоположением НК 1 и всех ВО 2 в зоне радиосвязи; обеспечение постоянной радиосвязи с заданными с НК 1 подвижными воздушными объектами 2; оптимальное управление движением собственного ВО 2; решение конфликтных ситуаций и выполнение других операций.
Эти операции выполняются программно с помощью дополнительных модулей, конструктивно встраиваемых в вычислители 3 и 13 АРМ или выполненных в виде отдельных узлов, входящих в «обрамление» указанных вычислителей, и могут быть использованы в качестве резервных. Все АРМ 30 идентичны по структуре и программному обеспечению. Пульт 16 управления АРМ, предназначенный для выполнения известных операций [1], может состоять, например, из клавиатуры и манипулятора графического. Число АРМ 30 определяется требуемой производительностью операторов (диспетчеров), числом ВО 2, потребителей информации и объемом потребляемой ими информации. Бортовой вычислитель 3 может состоять из нескольких процессоров, объединенных общей шиной. Все АРМ 30 соединены между собой и с другими блоками системы с помощью локально-вычислительных сетей 27. ЛВС 27 может состоять из нескольких интерфейсов со своими физическими линиями, например, МКИО, Ethernet, RS-232 и других [5, 6].
Для линии связи СВЧ диапазона в соответствии с рекомендациями Международной комиссии по радиочастотам могут быть выбраны, например, диапазоны LDRCL - (1710-1850) МГц, RCL - (7125-8500) МГц или другие, имеющие характерные окна радиопрозрачности атмосферы. Особенностью широкополосной радиолинии связи является то, что в наземной и бортовой аппаратуре связи 29 и 21 для повышения помехозащищенности могут использоваться, например, кодирование передаваемых данных, комбинированные методы модуляции, способы борьбы с замираниями в условиях многолучевого распространения радиоволн, а также направленные антенны 23 и 25 с узкой ДНА (от 1° до 10°) [7].
Аппаратура связи 21 и 29 состоит, например, из радиостанции СВЧ диапазона и соответствующей аппаратуры обработки и передачи данных. Кодирование передаваемых данных может быть осуществлено, например, с помощью сверточного кодирования по Витерби с мягким решением и использованием модифицированной решающей обратной связи [7, 8]. Для борьбы с замираниями в условиях многолучевого распространения радиоволн может быть использован, например, широкополосный сигнал и прием разнесенных во времени сигналов по схеме «РЕЙК», в которой обеспечивается разделение и адаптивное весовое сложение сигналов в динамике профиля многолучевости [7, 8]. В радиостанции для создания широкополосного сигнала может быть использован, например, метод непосредственной модуляции сигнала промежуточной частоты фазоманипулированной псевдослучайной последовательностью. В некоторых вариантах может быть использована псевдослучайная перестройка несущей частоты.
В качестве антенн 23 и 25 могут быть использованы, например, активные фазированные антенные решетки или параболические антенны с электромеханическим управлением положением ДНА. Сектор сканирования луча ДНА антенны 25 по азимуту 360°, по углу места - практически от 0 до 180° (без учета углов закрытия и особенностей связи при углах места вблизи 90°). Управление положением ДНА выполняется, например, программно с помощью вычислителей 3, 13 и дополнительных модулей, конструктивно встраиваемых в вычислители 3 и 13 АРМ или выполненных в виде отдельных узлов, входящих в «обрамление» указанных вычислителей. Сохранение положения центра ДНА в направлении на выбранный объект системы при маневрах ВО 2 или НК 1 обеспечивается с помощью блоков горизонтирования 24 и 26, управляемых с помощью данных с вычислителей 3, 13. Наведение ДНА осуществляется путем нахождения пространственного вектора между двумя объектами системы и направления по нему центров ДНА соответствующих объектов системы. Для этого с учетом тенденции (экстраполяции) движения с привязкой к единому всемирному времени используются точные координаты ВО 2 и НК 1, вычисляемые по выходным сигналам приемников 5 и 14 глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS [9]. В упрощенном варианте построения системы на ВО 2 может быть установлена пассивная антенна с круговой ДНА по азимуту и с небольшой направленностью по углу места с коэффициентом усиления (3-10) дБ. В этом случае блок 24 горизонтирования и функциональные связи бортового вычислителя 3 с бортовой антенной 23 и блоком 24 горизонтирования, бортовой антенны 23 и блока 24 могут отсутствовать. Для защиты антенн 23 и 25 от внешних воздействий могут быть использованы, например, радиопрозрачные укрытия, не показанные на фигуре. Для варианта использования на НК 1 параболических антенн с электромеханическим управлением положением ДНА под радиопрозрачным укрытием размещают устройства сканирования наземной антенны 25 по азимуту и углу места и соответствующие датчики, антенный коммутатор 28, блок 26 горизонтирования и для уменьшения потерь радиосигнала в антенно-фидерном тракте наземную аппаратуру 29 связи.
Информация блоков 12, 14, 20 обрабатывается в вычислителе 13 одного из АРМ, например первого. Полученные по ЛВС 27 данные распределяются между остальными вычислителями 13 АРМ 30 и, при необходимости, передаются через одну из В вторых наземных АПД 31 блока 33 сопряжения и устройство 32 сопряжения с каналом связи блока сопряжения 33 по шине 34 соответствующему потребителю информации. Сообщения от потребителя информации на вычислители 13 АРМ 30 и ВО 2 передаются через те же узлы, но в обратном порядке. В зависимости от объема требуемой информации для обработки и формирования сообщений потребителю могут быть использованы несколько АРМ 30. Обмен данными по ЛВС 27 организуется известными способами с помощью концентратора 35, который может быть выполнен, например, в виде оконечного устройства для интерфейса МКИО [5, 6].
При выходе за пределы радиогоризонта хотя бы одного из ВО 2 или приближении к границе зоны устойчивой радиосвязи программно определяется один из ВО 2, который назначается ретранслятором сообщений, условно обозначенный на фигуре цифрой 2 ч. Ретрансляция данных осуществляется в MB диапазоне и СВЧ диапазоне (при необходимости). В СВЧ диапазоне ДНА на сторонах приема и передачи должны быть направлены друг на друга. При постоянном изменении дальности между взаимодействующими ВО 2 в качестве ретранслятора может быть определен любой из N подвижных воздушных объектов, местоположение которого оптимально по отношению к НК 1 и всем остальным ВО 2. В этом случае автоматически или оператором АРМ 30 назначается ВО 21, который в течение определенного времени будет использоваться в качестве ретранслятора. По анализу местоположения и параметров движения остальных ВО 2 в вычислителе 13 АРМ определяются оптимальные пути доставки сообщений удаленному от НК 1 за радиогоризонт подвижному воздушному объекту, а для радиолинии СВЧ диапазона - положения ДНА на приемной и передающей сторонах выбранных для ретрансляции ВО 2.
Узлы 7, 8, 9, составляющие основу бортового комплекса связи MB диапазона, и узлы 10, 11, 12, составляющие основу наземного комплекса связи MB диапазона, для повышения надежности связи могут быть зарезервированы. Тогда один их входов/выходов бортового вычислителя 3 должен быть подключен ко второй цепочке, состоящей из последовательно соединенных узлов 7, 8, 9, а на НК 1 один их входов/выходов наземного вычислителя 13 любого из АРМ 30 также должен быть подключен к соответствующей второй цепочке, состоящей из последовательно соединенных узлов 12, 11, 10. В этом случае в наземном вычислителе 13 одного из АРМ, определенного ведущим, осуществляются операции оценки достоверности информации, принимаемой с ВО 2 по двум MB каналам, выбора и обработки наиболее ценной, достоверной информации.
Сообщение от НК 1 через последовательную цепочку, состоящую из (N-1) воздушных объектов 2, может быть доставлено N-му ВО 2N. Для этого на НК 1 в формирователе 20 типа ретранслируемых сообщений в заранее определенные разряды передаваемой кодограммы закладываются номер ВО 21, назначенного ретранслятором, и адреса подвижных воздушных объектов 2N, обеспечивающих заданный трафик сообщения. При помеховой обстановке трафики для радиосигналов MB диапазона и СВЧ диапазона могут быть различные. Принятые данные обрабатываются в блоке 17 анализа типа сообщений подвижного воздушного объекта 2. Если сообщение предназначено для данного ВО 2, то после анализа решается вопрос о направлении данных на блок 6 регистрации или по двунаправленной шине 18 на систему управления ВО, не указанную на фигуре, или, при работе в режиме ретрансляции, о передаче данных на соседний ВО 2i. Для исключения коллизий минимизируется число разрядов в передаваемом сообщении, а ретрансляция данных осуществляется последовательно во времени.
При обмене данными по линиям «воздух-земля», «воздух-воздух», особенно при наличии помеховой обстановки, снижения достоверности передачи данных в MB диапазоне, управление графиком СВЧ радиосигнала осуществляется с наземного вычислителя 13 в соответствии с алгоритмом, заключающемся в том, что на передающей стороне соответствующего ВО 2 наводят диаграмму направленности антенны на диаграмму направленности антенны приемной стороны выбранного для ретрансляции ВО 2 и передают сигналы. На приемной стороне известными способами [4, 8] определяют достоверность передачи информации. Полученную оценку передают в обратном направлении. Эти данные с привязкой к единому времени и координатам (местоположению) ВО 2 запоминаются для дальнейшего использования в процессе связи. Затем на передающей стороне оценивают уровень достоверности передачи информации, приходящей с направления приемной стороны. При низкой достоверности с помощью обработки данных о положении всех ВО 2, хранимых в наземном вычислителе 13, выбирают другой маршрут ретрансляции. В следующий момент времени диаграммы направленности антенны передающей и антенны приемной стороны устанавливаются друг на друга в соответствии с выбранным маршрутом.
Для последовательного выполнения этих операций в заданный момент времени определяется текущее местоположение всех ВО 2 и НК 1, вычисляются в наземном вычислителе 13 экстраполяционные точки нахождения соответствующих объектов системы во время планируемого сеанса связи, осуществляется взаимное наведение центров диаграмм направленности антенн НК 1 и первого (в порядке обслуживания) ВО 2 и слежение за ним во время движения. Затем проводят обмен данными между соответствующими объектами системы и после получения подтверждения о приеме эту процедуру повторяют со вторым ВО 2 и так далее. При совпадении направления на N-й ВО 2 с направлением на источник помех, положение которого определено в наземном вычислителе 13 по результатам оценки достоверности принятой информации со всех ВО 2, вычисляется оптимальный маршрут передачи данных на N-й ВО 2 через другие подвижные воздушные объекты, работающие в режиме ретрансляции. В НК 1 и в выбранных для ретрансляции ВО 2 с помощью соответствующих вычислителей осуществляется взаимное наведение центров диаграмм направленности антенн и слежение за соответствующими объектами во время их движения. Для этого с наземного вычислителя 13 НК 1, имеющего больший объем информации о воздушной ситуации в своей зоне ответственности по сравнению с бортовыми вычислителями 3 ВО 2, постоянно осуществляется обмен соответствующими сообщениями со всеми ВО 2.
После получения на НК 1 подтверждения о достоверном приеме информации на ВО 2 в вычислителе 13 АРМ 30 автоматически формируется следующее сообщение в адрес управляемого ВО 2. Это сообщение, пройдя по той же рассмотренной ранее цепочке, но только в обратном порядке, поступает на соответствующий бортовой вычислитель 3 и, при необходимости, отображается на экране бортового блока 6 регистрации данных.
Для удобства разрешения оператором НК 1 конфликтной ситуации при наличии помеховой обстановки на экран первого монитора 15 АРМ 30 НК 1 может выводиться положение обслуживаемого ВО 2 относительно НК 1. Для этого программно с помощью вычислителя 13 АРМ выделяются части пространства, в которых помеховая ситуация в вероятностном смысле менее напряженная, и через находящиеся там ВО 2 осуществляется трафик. Для отображения тенденции движения каждого ВО 2 на экране второго монитора 37 АРМ вычислителем 13 АРМ 30 формируются отметки, характеризующие предыдущее местоположение ВО 2 и экстраполяционные отметки, характеризующие местоположение ВО 2 через заданный интервал времени. По мере движения ВО 2 устаревающие отметки стираются. Положение трассы полета всех ВО 2 в зоне обслуживания НК 1 сохраняются в памяти соответствующих вычислителей 13 АРМ на заданный период времени.
При передаче с НК 1 приоритетных сообщений для ВО 2 в соответствии с категориями срочности, принятыми в системе радиосвязи с воздушными объектами, в формирователе 20 типа ретранслируемых сообщений в заголовке сообщения формируется код запрета передачи других сообщений на время, отводимое для трансляции данных с НК 1 на выбранное ВО 2i с учетом времени реакции ВО 2 на принятое сообщение и времени задержки в трактах обработки дискретных сигналов. Принимаемая на ВО 2N информация отображается на экране бортового блока 6 регистрации данных в виде буквенно-цифровых символов или в виде точек и векторов.
Остальные менее приоритетные сообщения в соответствии с протоколом обмена находятся в очереди соответствующей категории срочности. В вычислителях 3 и 13 определяется время "старения" информации, и если сообщение в течение определенного промежутка времени не было передано в канал связи, то оно "стирается" и посылается запрос на повторную передачу сообщения.
В обычном режиме в беспомеховой обстановке с НК 1, когда не требуется ретрансляция сигналов, осуществляется адресный опрос ВО 2 путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) с любого из пультов 16 управления АРМ 30 сообщение отображается на экране второго монитора 37 АРМ и параллельно на НК 1 после прохождения сигнала через вычислитель 13 АРМ 30, аппаратуру передачи данных 12, радиостанцию 11, антенну 10 и на ВО 2 - через бортовые: антенну 9, радиостанцию 8, аппаратуру передачи данных 7 поступает в бортовой вычислитель 3, где происходит идентификация принятого в сообщении адреса с собственным адресом ВО 2. Если адреса совпадают, то сообщение передается в блок 17 анализа типа ретранслируемого сообщения для дешифрации служебной части полученного сообщения и определения режима работы аппаратуры ВО 2. Информационная часть сообщения записывается в память бортового вычислителя 3 и при необходимости выводится на экран блока 6 регистрации данных, который может быть выполнен в виде монитора или другого устройства отображения.
В зависимости от числа подвижных воздушных объектов и числа переспросов сообщений в канале радиосвязи в системе используются динамические алгоритмы обмена сообщениями и эффективного управления полетом ВО 2. При изменении помеховой обстановки, взаимного положения НК 1 и ВО 2 нарушения режима полета подвижного воздушного объекта и других параметров в вычислителях 3 и 13 автоматически формируется предупреждающий сигнал о возможном «обрыве» связи, информация о котором выводится на экраны блока 6 регистрации данных и второго монитора 37 АРМ. Визуальная картинка может быть усилена звуковым эффектом. При использовании определенного формата заголовка сообщения с выхода бортовых формирователей 19 типа ретранслируемых сообщений может быть использован режим свободного доступа со стороны других подвижных воздушных объектов 2 или режим выделения временного интервала для организации обмена данными с наземным комплексом 1.
В результате анализа состояния и загрузки каналов радиосвязи MB и СВЧ диапазонов в вычислителе 13 АРМ 30 НК 1 и выбора лучшего из них определяется число столкновений сообщений в каналах связи, и, когда это число превышает предельно допустимое, система переходит в режим адресного опроса для упорядочения работы канала передачи данных "воздух-земля". Для того чтобы избежать столкновений в радиоканале связи при одновременной передаче несколькими объектами, вычислителями 3 и 13 может осуществляться, например, контроль радиосигналов при воздействии на радиостанцию преамбулы или заголовка (служебной части сообщений). Подготовленное сообщение с ВО 2 передается только в том случае, когда радиоканал свободен. Для того чтобы разнести во времени моменты выхода на связь подвижных воздушных объектов в то время, когда они обнаружили, что радиоканал занят, в вычислителях 3 и 13 может формироваться, например, псевдослучайная задержка передачи сообщений от воздушных объектов 2 и НК 1 - для каждого объекта своя.
В режиме адресного опроса инициатором связи может быть только НК 1. Если воздушные объекты 2 сформировали для передачи сообщения и обнаружили, что радиоканал свободен, то они информируют остальные подвижные воздушные объекты в MB диапазоне и в СВЧ диапазоне о начале цикла передачи данных, в том числе о своем местоположении, и случайным образом в выделенных им временных слотах распределяют передаваемые сообщения. На каждом из ВО 2 в бортовом вычислителе 3 оценивается уровень принимаемого радиосигнала в радиоканале и с использованием для выбора интервалов передачи точных по времени импульсов синхронизации с выхода приемников глобальных навигационных спутниковых систем. При совпадении расчетного интервала передачи с установленной очередностью подвижный воздушный объект 2 начинает передачу собственного пакета данных в выделенном интервале времени.
Формирователи 20 и 19 типа ретранслируемых сообщений, пульт 16 управления в НК 1 позволяют обеспечить обмен цифровыми данными по каналам "воздух-земля" MB и СВЧ диапазонов взамен существующей речевой информации. Они обеспечивают выбор элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набор произвольного текста. Отображение набираемых на наземном пульте 16 управления и принятых с ВО 2 сообщений осуществляется на экране второго монитора 37 АРМ 30 НК 1. Формирователи 20 и 19 типа ретранслируемых сообщений могут быть выполнены в виде отдельных узлов или программными методами с помощью вычислителей 3 и 13.
Сообщения с выходов приемников 5 и 14 сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS, записываются в память вычислителей 3 и 13 с привязкой к глобальному времени. В вычислителях 3 и 13 эти данные используются для расчета навигационных характеристик и параметров движения каждого ВО в зоне радиосвязи НК 1, а также для ориентирования в пространстве диаграмм направленности антенн 23 и 25 ВО 2 и НК 1 соответственно, в том числе при мобильном исполнении НК 1. В зависимости от выбранного интервала времени выдачи на НК 1 сообщений о местоположении ВО 2 в вычислителе 3 в заданное время формируется соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ВО 2.
Принятые на НК 1 навигационные сообщения от всех ВО 2 обрабатываются в вычислителе 13 АРМ и распределителе 36 данных, затем выводятся на экран второго монитора 37 АРМ 30. Точка, характеризующая местоположение НК 1, размещается, например, в центре экрана первого монитора 15 АРМ 30. ВО 2, находящиеся вблизи зоны устойчивой радиосвязи, выделяются от остальных, например, цветом отметки на экране первого монитора 15 АРМ, и для них в вычислителях 3 и 13 начинается решение задачи выбора оптимального пути трансляции управляющих сообщений от НК 1 на выбранное ВО 2. Для этого постоянно в вычислителе 13 одного или одновременно нескольких АРМ 30 для обслуживаемых ВО 2 известными методами [4, 8] оцениваются зоны устойчивой радиосвязи для НК 1 и всех ВО 2. Наличие приемника 14 сигналов навигационных спутниковых систем позволяет проводить управлений ВО 2 и с мобильного НК 1. В аппаратуре передачи данных 7 и 12 осуществляются известные операции: модуляции и демодуляции, кодирования и декодирования и другие [4, 8].
На момент подачи заявки разработаны алгоритмы и программное обеспечение заявляемой системы радиосвязи. Узлы и шины 1-35 одинаковые с прототипом. Оборудование, реализующие функции узла 37, выпускается серийно. Блок 36 может быть выполнен программно. Вычислители 3 и 13 могут быть выполнены, например, на плате процессорной 5066-586-133 MHz-1 MB, 2 MB Flash CPU Card фирмы Octagon Systems и ЭВМ типа «Багет-01-07» ЮКСУ.466225.001 соответственно.
Использование заявляемой системы радиосвязи с подвижными объектами позволяет разгрузить оператора от наблюдения постоянно появляющихся на экране монитора вспомогательных (контрольных) сообщений, что позволит сосредоточить его внимание на более качественной обработке основной высокоскоростной информации.
Литература:
1. В.В. Бочкарев, Г.А. Крыжановский, Н.Н. Сухих. Автоматизированное управление движением авиационного транспорта. М.: - Транспорт, 1999. 319 с.
2. AC №1 401 626 М. кл. Н04В 7/26, H04L 27/00, БИ №21, 1988.
3. Патент РФ №195774. М. кл. Н04В 7/26, 2002.
4. Патент РФ №2 309543 С2. М. кл. Н04В 7/26, Н04В/185, 2007 (прототип).
5. К.Э. Эрглис. Интерфейсы открытых систем. - М.: Горячая линия - Телеком, 2000. - 256 с.
6. А.А. Мячев. Интерфейсы средств вычислительной техники. Энциклопедический справочник. - М.: Радио и связь, 1993. - 350 с.
7. В.В. Бортников, С.С. Ананченков. Помехоустойчивость двоичных сигналов в марковском канале с замираниями. - Изв. вузов MB и ССО СССР, Радиотехника, 1984, т.24, №10, С.78-80.
8. Уильям К. Ли. Техника подвижных систем связи. - М.: Радио и связь, 1985, 391 с.
9. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
Система радиосвязи с подвижными объектами, состоящая из наземного комплекса (НК), содержащего наземную антенну, радиостанцию, подключенную двухсторонними связями через аппаратуру передачи данных к соответствующему первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к первому монитору АРМ, формирователь типа ретранслируемых сообщений, соединенный с соответствующим входом вычислителя АРМ, концентратор, подключенный к локально-вычислительным сетям, которые в свою очередь подключены двухсторонними связями к соответствующим входам/выходам наземной направленной антенны, наземному антенному коммутатору, наземной аппаратуре связи, каждому из А АРМ, состоящих из вычислителя АРМ, соединенного с выходом пульта управления АРМ и с входом монитора АРМ, каждому из В блоков сопряжения, состоящих из последовательно соединенных второй наземной аппаратуры передачи данных и устройства сопряжения с каналом связи, вход/выход которого является входом/выходом системы, наземная направленная антенна через антенный коммутатор соединена двухсторонней связью с соответствующим входом/выходом наземной аппаратуры связи, наземный блок горизонтирования подключен к наземной направленной антенне механическими связями, в режимах ретрансляции и обмена данными бортовая направленная антенна 1-го подвижного воздушного объекта (ВО) соединена по эфиру с бортовой направленной антенной 2-го ВО и так далее до N-го ВО, N подвижных воздушных объектов, в состав каждого из которых входят бортовые датчики, бортовой приемник сигналов навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений с антенной, каждый из которых соединен с соответствующими входами бортового вычислителя, выход которого подключен к входу блока регистрации данных, а вход/выход - к двунаправленной шине системы управления подвижным воздушным объектом, бортовая аппаратура связи, бортовая направленная антенна, бортовой антенный коммутатор, бортовой блок горизонтирования, каждый из которых соединен двухсторонними связями с соответствующими входами/выходами бортового вычислителя, бортовой блок горизонтирования подключен к бортовой направленной антенне механическими связями, бортовая аппаратура связи через последовательно соединенные бортовой антенный коммутатор, бортовую направленную антенну через эфир подключена к наземной направленной антенне, бортовой вычислитель через последовательно соединенные бортовые аппаратуру передачи данных и радиостанцию подключен к бортовой антенне, причем передача данных с НК обеспечивается по цепочке последовательно соединенных первого подвижного воздушного объекта, второго ВО и далее до N-го ВО, а передача данных с N-го ВО на НК осуществляется в обратном порядке, отличающаяся тем, что в НК введен распределитель данных, подключенный двухсторонними связями к локально-вычислительным сетям и второй монитор АРМ, соединенный с соответствующим выходом вычислителя АРМ.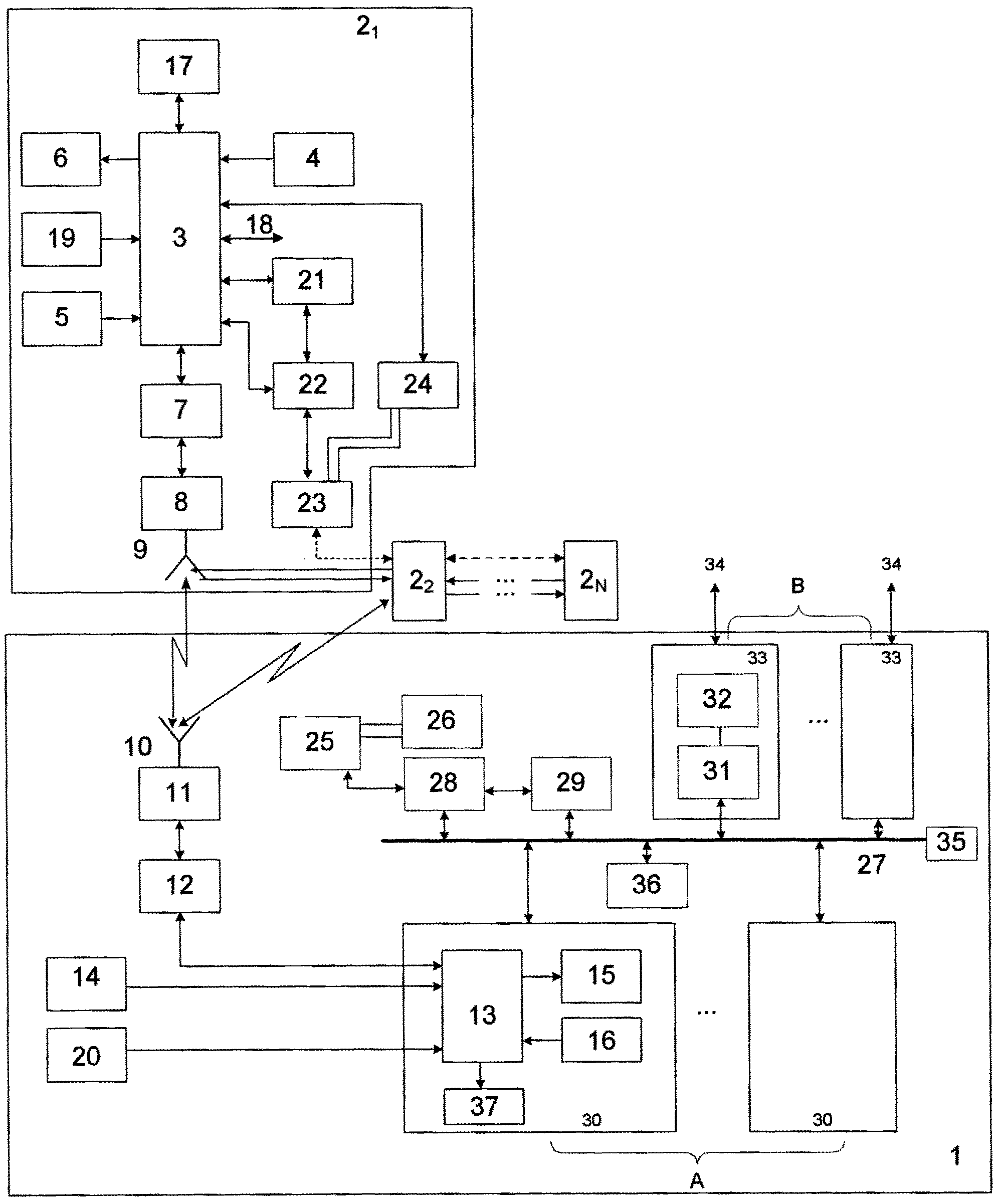
Подвижный комплекс средств связи
Способ повышения температурной стабильности частоты узкополосного фильтра на пав и узкополосный фильтр на пав с повышенной температурной стабильностью частоты
Способ адаптивной радиосвязи на дальних радиотрассах в дкмв диапазоне
Система радиосвязи с воздушными объектами
Способ комплексного телемониторинга подвижных объектов
Способ обмена сообщениями в цифровых сетях радиосвязи с пакетной передачей информации
Способ радиосвязи с подвижными объектами
Система радиосвязи с подвижными объектами
Способ радиосвязи с подвижными объектами
Устройство ретрансляции дискретных сигналов
Подвижный комплекс средств связи
Способ повышения температурной стабильности частоты узкополосного фильтра на пав и узкополосный фильтр на пав с повышенной температурной стабильностью частоты
Способ адаптивной радиосвязи на дальних радиотрассах в дкмв диапазоне
Система радиосвязи с воздушными объектами
Способ комплексного телемониторинга подвижных объектов
Способ обмена сообщениями в цифровых сетях радиосвязи с пакетной передачей информации
Способ радиосвязи с подвижными объектами
Система радиосвязи с подвижными объектами
Способ радиосвязи с подвижными объектами
Устройство ретрансляции дискретных сигналов

