Результат интеллектуальной деятельности: УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ И ПРОЦЕССОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Вид РИД
Изобретение
Изобретение относится к автоматизированному электроприводу переменного тока, в частности к автоматизированной идентификации параметров электропривода с асинхронными электродвигателями, и может найти применение в адаптивных и самонастраивающихся системах.
Известно устройство оценивания параметров электродвигателя, содержащее асинхронный электродвигатель, параметры которого подлежат оцениванию, датчик частоты вращения, датчики продольного тока статора, его производной, поперечного тока статора, его производной, продольного напряжения статора, поперечного напряжения статора, продольного тока ротора, его производной, поперечного тока ротора, его производной, частоты вращения вала, датчик углового ускорения, механически связанный с валом электродвигателя, внешний сигнал угла поворота системы ортогональных координат, устройство дифференцирования, умножители, сумматоры, масштабирующие устройства и интеграторы (патент РФ 2392731, H02P 7/06, опубл. 20.06.2010).
Недостатком устройства является невозможность оценки частоты вращения ротора электродвигателя.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому эффекту является устройство оценивания параметров асинхронного электродвигателя, содержащее асинхронный электродвигатель, параметры которого подлежат оцениванию, датчики фазных напряжений статора, датчики фазных токов статора, датчик частоты вращения вала, датчик углового ускорения, преобразователь фазных напряжений и преобразователь фазных токов статора, позволяющие преобразовывать фазные напряжения и токи статора в напряжения и токи обобщенной машины, устройства дифференцирования, умножители, интеграторы, делители и сумматоры (патент РФ 2426219, H02P 7/06, опубл. 10.08.2011).
Недостатками данного устройства является ограниченная область применения, связанная с наличием датчиков частоты вращения и углового ускорения, и низкая помехозащищенность из-за необходимости дифференцирования токов. Установка датчиков частоты вращения и углового ускорения требует применения дополнительных конструктивных элементов, что усложняет конструкцию и не позволяет использовать устройство в аэрокосмической технике.
Технической задачей изобретения является расширение области применения устройства оценивания параметров и процессов асинхронного электродвигателя.
Поставленная задача решается тем, что в устройство оценивания параметров и процессов асинхронного электродвигателя, включающее в себя соединенный с трехфазным асинхронным электродвигателем блок датчиков фазных напряжений и фазных токов, состоящий из первого-третьего датчиков фазных напряжений и первого-третьего датчиков фазных токов, блок преобразования координат, состоящий из первого интегратора, первого сумматора, преобразователя фазных напряжений и преобразователя фазных токов статора, первые, третьи, четвертые входы преобразователя фазных напряжений и преобразователя фазных токов статора соединены с выходами первого-третьего датчиков фазных напряжений и выходами первого-третьего датчиков фазных токов соответственно, входы которых соединены с асинхронным электродвигателем, введены настраиваемая модель асинхронного электродвигателя, второй и третий сумматоры, пять блоков вычисления оценок параметров, каждый блок вычисления оценки параметра включает в себя генератор функций чувствительности, два умножителя, один сумматор и один интегратор, при этом на входы генераторов функций чувствительности блоков вычисления оценок параметров, неинвертирующий вход первого сумматора и вход первого интегратора, выход которого соединен со вторыми входами преобразователя фазных напряжений статора и преобразователя фазных токов статора, подается внешний сигнал частоты вращения системы ортогональных координат, этот сигнал также подается на вход настраиваемой модели асинхронного электродвигателя, входы напряжений настраиваемой модели асинхронного электродвигателя соединены с выходами преобразователя фазных напряжений статора, вход частоты скольжения настраиваемой модели асинхронного электродвигателя и входы генераторов функций чувствительности блоков вычисления оценок параметров соединены с выходом первого сумматора, выход частоты вращения ротора настраиваемой модели асинхронного электродвигателя соединен с инвертирующим входом первого сумматора, а ее информационные входы соединены с выходами интеграторов блоков вычисления оценок параметров, токовые выходы настраиваемой модели асинхронного электродвигателя соединены с токовыми входами генераторов функций чувствительности блоков вычисления оценок параметров, выходы продольного и поперечного токов статора настраиваемой модели асинхронного электродвигателя соединены с инвертирующими входами второго и третьего сумматоров соответственно, неинвертирующие входы которых соединены соответственно с первым и вторым выходами преобразователя фазных токов статора, а выходы соединены соответственно с первыми входами первого и второго умножителей блоков вычисления оценок параметров, вторые входы которых соединены с выходами генератора функций чувствительности соответствующего блока, а выходы умножителей соединены с первым и вторым неинвертирующими входами сумматора соответствующего блока, выходы которых соединены соответственно с входами интегратора соответствующего блока, выходы интеграторов блоков вычисления оценок параметров соединены с входами генераторов функций чувствительности блоков вычисления оценок параметров, а также с входами настраиваемой модели асинхронного электродвигателя.
Техническим результатом изобретения является расширение области применения устройства.
Изобретение поясняется чертежами на фиг.1-8, где:
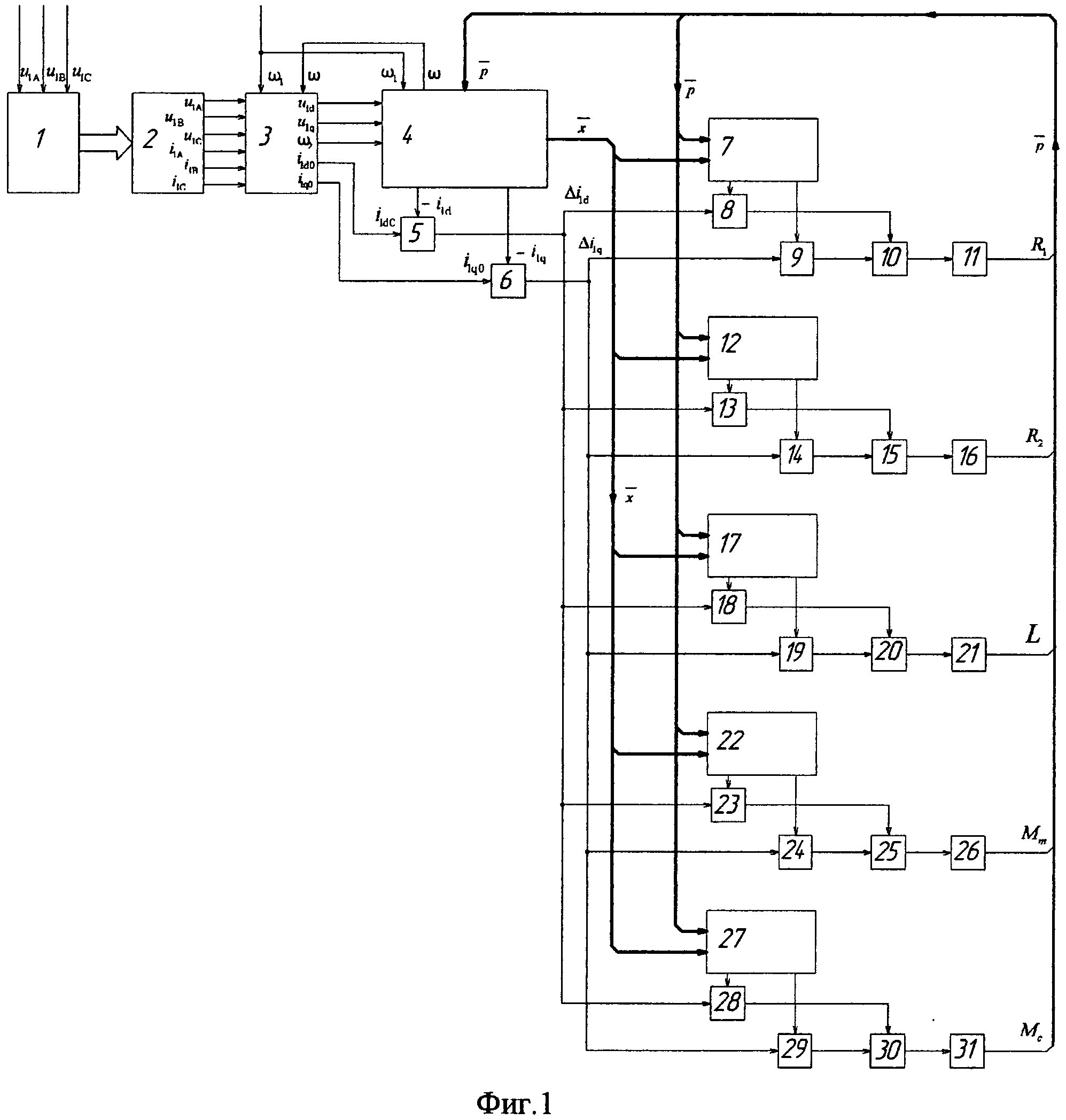
фиг.1 - функциональная схема устройства оценивания параметров и процессов асинхронного электродвигателя;
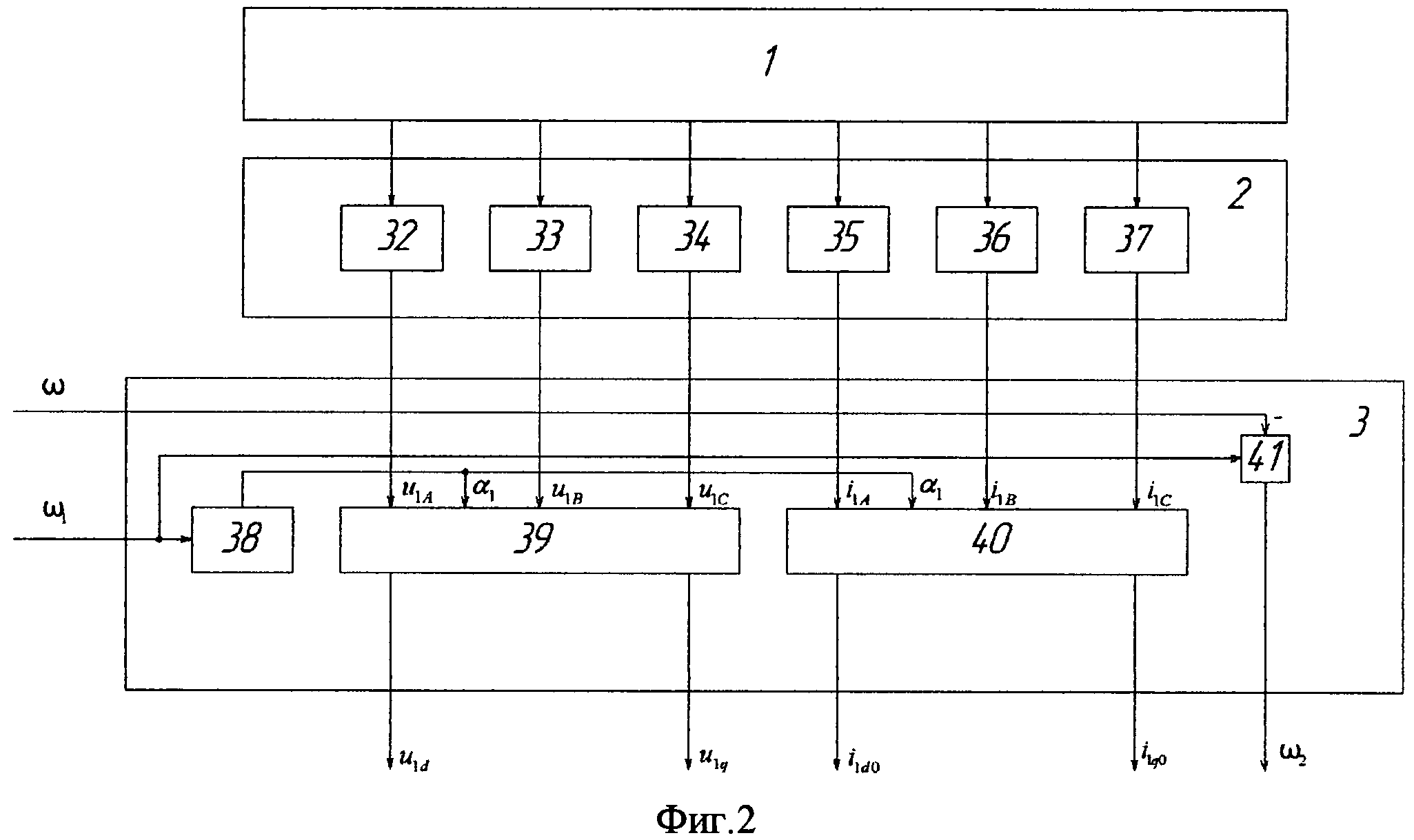
фиг.2 - функциональная схема блоков датчиков и преобразования координат;
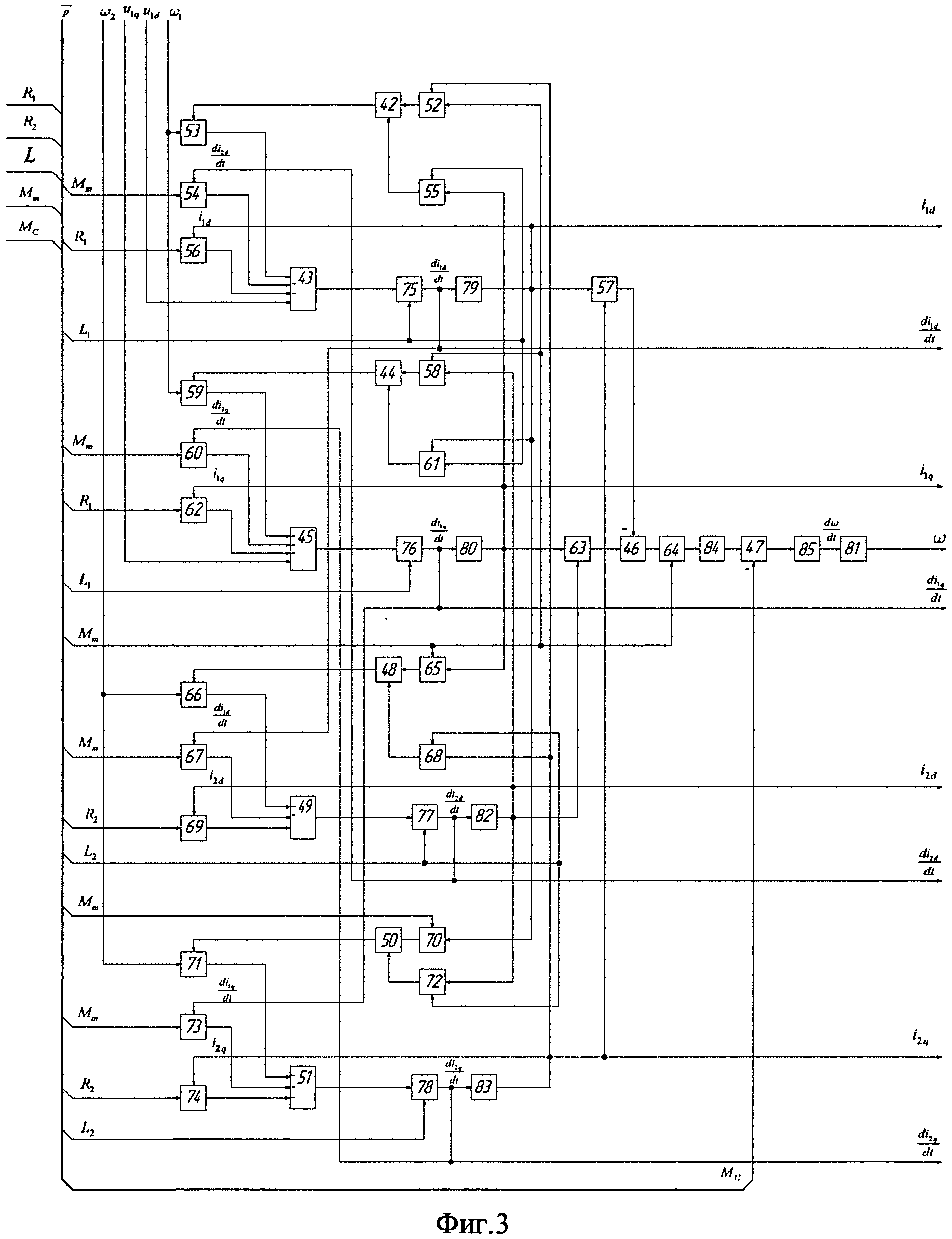
фиг.3 - функциональная схема настраиваемой модели асинхронного электродвигателя;
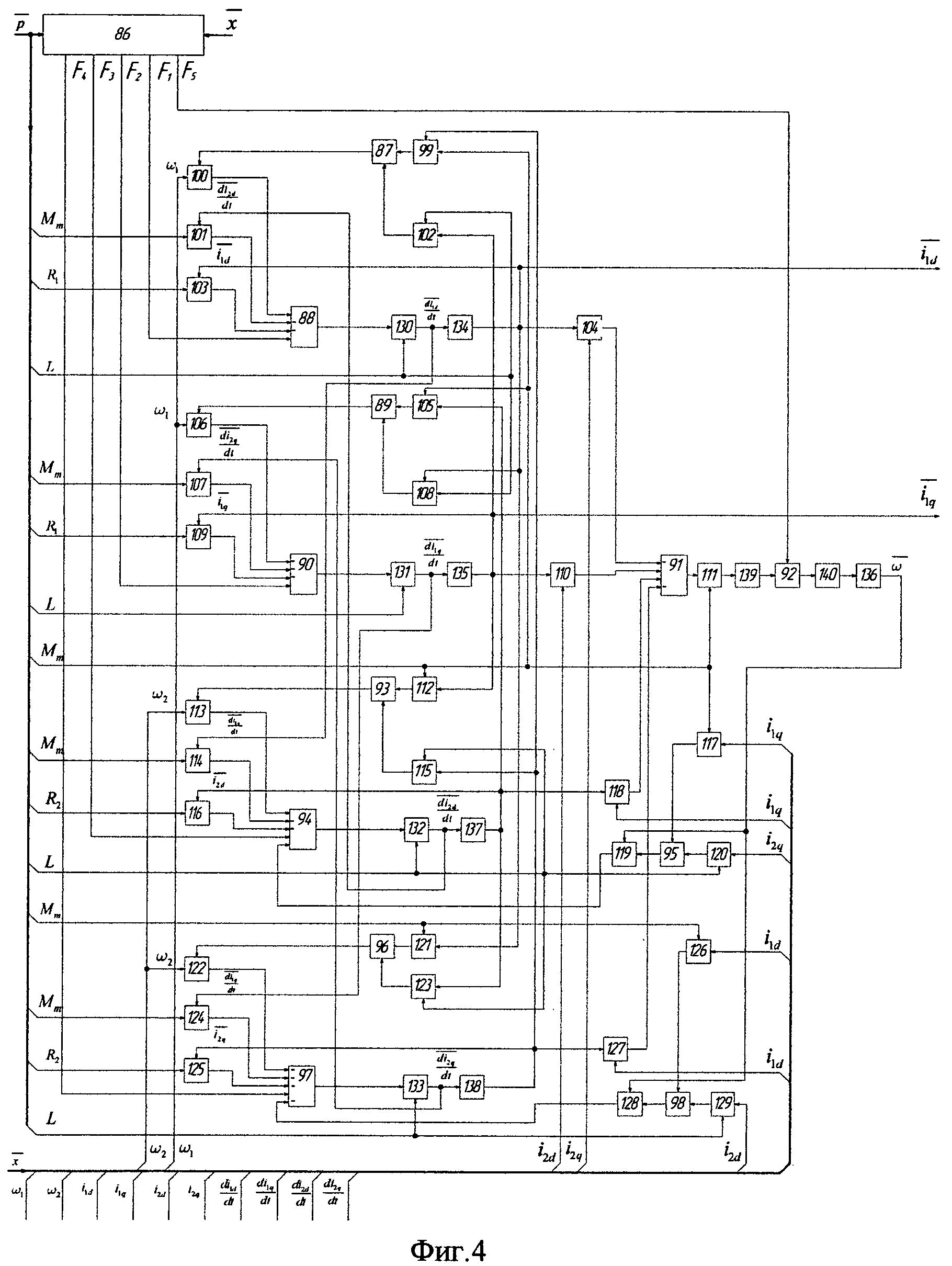
фиг.4 - функциональная схема генератора функций чувствительности;
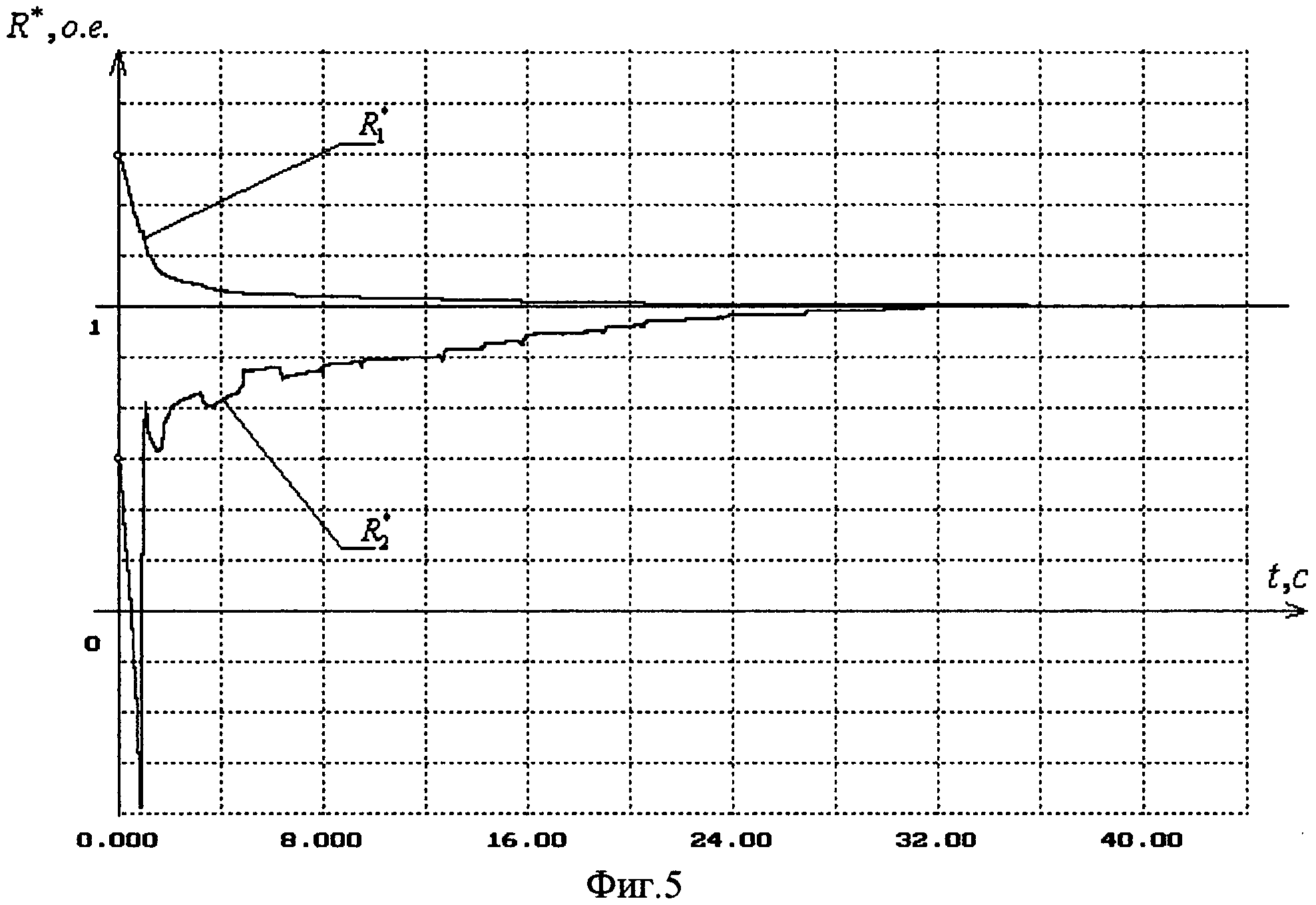
фиг.5 - процесс оценивания активных сопротивлений фаз статора и ротора при начальном отклонении всех параметров на 50%;
фиг.6 - процесс оценивания индуктивностей фаз статора и ротора при начальном отклонении всех параметров на 50%;
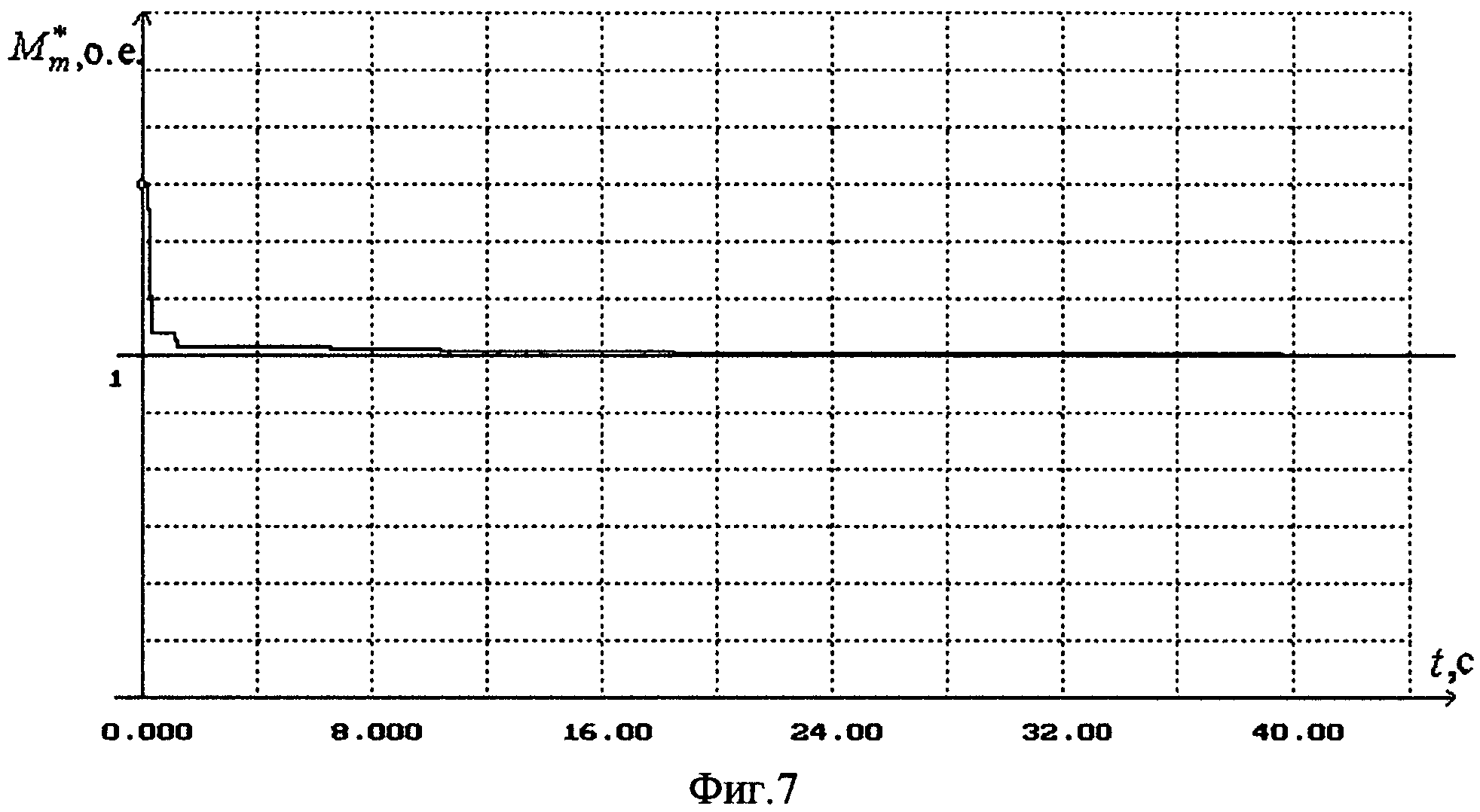
фиг.7 - процесс оценивания взаимной индуктивности при начальном отклонении всех параметров на 50%;
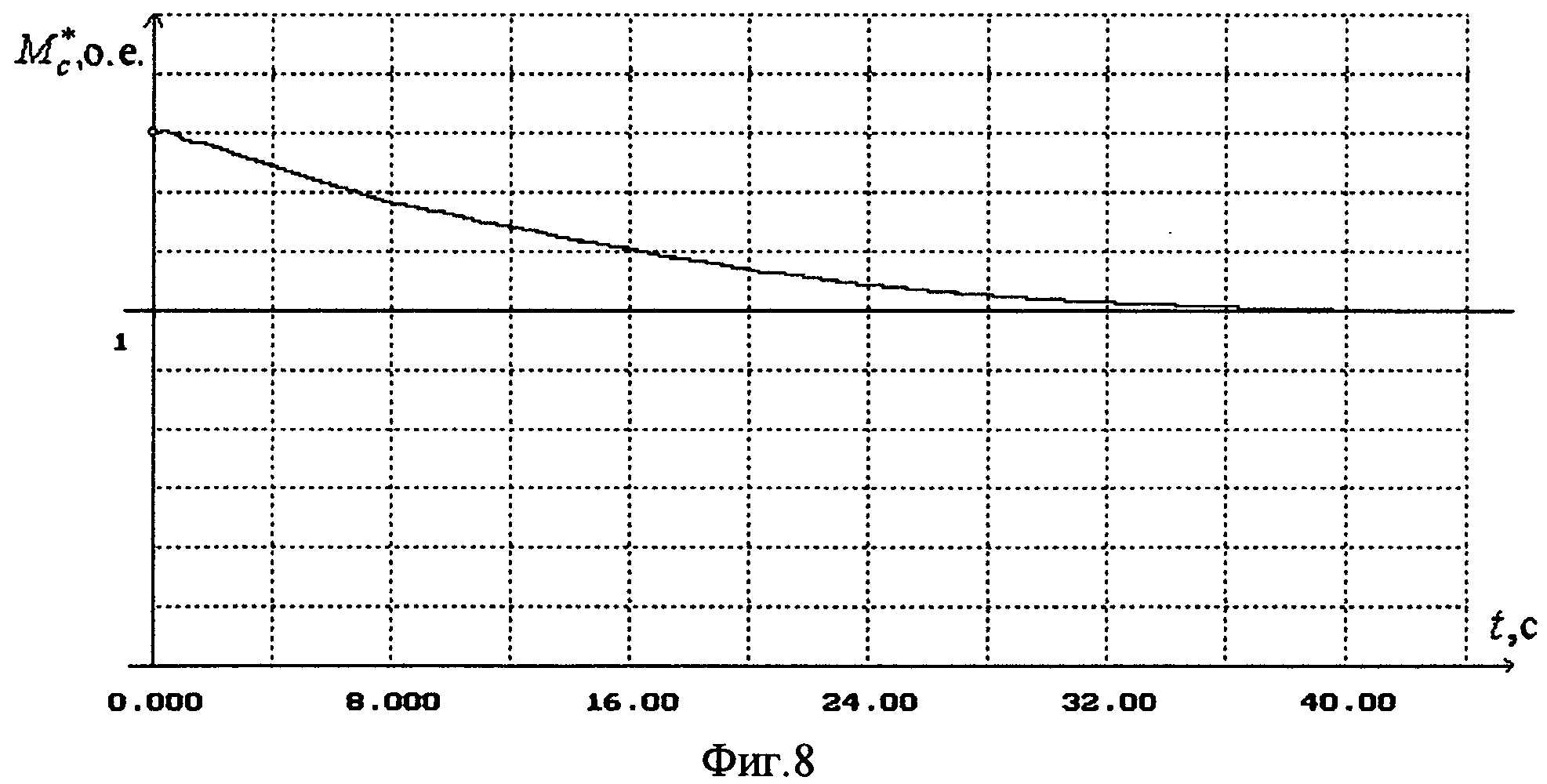
фиг.8 - процесс оценивания статического момента при начальном отклонении всех параметров на 50%.
Устройство оценивания параметров и процессов асинхронного электродвигателя включает трехфазный асинхронный электродвигатель 1, параметры и процессы которого подлежат оцениванию, блок датчиков 2, блок преобразования координат 3, настраиваемую модель асинхронного электродвигателя 4, сумматоры 5, 6, пять блоков вычисления оценок параметров (фиг.1).
Блок вычисления оценки активного сопротивления фазы обмотки статора R1 включает в себя генератор функций чувствительности 7, умножители 8, 9, сумматор 10, интегратор 11.
Блок вычисления оценки активного сопротивления фазы обмотки ротора R2 включает в себя генератор функций чувствительности 12, умножители 13, 14, сумматор 15, интегратор 16.
Блок вычисления оценки индуктивности фазы обмотки статора и ротора L включает в себя генератор функций чувствительности 17, умножители 18, 19, сумматор 20, интегратор 21.
Блок вычисления оценки взаимной индуктивности Mm включает в себя генератор функций чувствительности 22, умножители 23, 24, сумматор 25, интегратор 26.
Блок вычисления оценки статического момента MC включает в себя генератор функций чувствительности 27, умножители 28, 29, сумматор 30, интегратор 31.
Блок датчиков 2 содержит датчики фазных напряжений статора 32, 33, 34, датчики фазных токов статора 35, 36, 37 (фиг.2).
Блок преобразования координат 3 содержит интегратор 38, преобразователь фазных напряжений статора 39, преобразователь фазных токов статора 40, сумматор 41 (фиг.2).
Внешний сигнал частоты вращения системы ортогональных координат подается на первый вход настраиваемой модели асинхронного электродвигателя 4, на первые входы генераторов функций чувствительности 7, 12, 17, 22, 27, на неинвертирующий вход сумматора 41 и на вход интегратора 38, выход которого соединен со вторыми входами преобразователя напряжений статора 39 и преобразователя токов статора 40.
Выходы датчиков фазных напряжений статора 32, 33, 34 и датчиков фазных токов статора 35, 36, 37, входы которых подсоединены к фазным обмоткам статора трехфазного асинхронного электродвигателя 1, соединены с первыми, третьими, четвертыми входами преобразователя напряжений статора 39 и преобразователя токов статора 40 соответственно. Выходы преобразователя напряжений статора 39 соединены со вторым и третьим входами настраиваемой модели асинхронного электродвигателя 4.
Информационные выходы настраиваемой модели асинхронного электродвигателя 4 соединены с входами генераторов функций чувствительности 7, 12, 17, 22, 27, а токовые выходы настраиваемой модели электродвигателя соединены с инвертирующими входами сумматоров 5 и 6, неинвертирующие входы которых соединены с выходами преобразователя токов статора 40.
Выход сумматора 5 соединен с первыми входами умножителей 8, 13, 18, 23, 28, вторые входы которых соединены с первыми выходами генераторов функций чувствительности 7, 12, 17, 22, 27 соответственно. Выход сумматора 6 соединен с первыми входами умножителей 9, 14, 19, 24, 29, вторые входы которых соединены с выходами генераторов функций чувствительности 7, 12, 17, 22, 27 соответственно.
Выходы умножителей 8, 9 соединены с первым и вторым входами сумматора 10, выход которого соединен с входом интегратора 11. Выходы умножителей 13, 14 соединены с первым и вторым входами сумматора 15, выход которого соединен с входом интегратора 16. Выходы умножителей 18, 19 соединены с первым и вторым входами сумматора 20, выход которого соединен с входом интегратора 21. Выходы умножителей 23, 24 соединены с первым и вторым входами сумматора 25, выход которого соединен с входом интегратора 26. Выходы умножителей 28, 29 соединены с первым и вторым входами сумматора 30, выход которого соединен с входом интегратора 31.
Выходы интеграторов 11, 16, 21, 26, 31 соединены с входами настраиваемой модели асинхронного электродвигателя 4, а также с входами генераторов функций чувствительности 7, 12, 17, 22, 27.
Настраиваемая модель асинхронного электродвигателя 4 построена по стандартной схеме (Копылов И.П. Математическое моделирование электрических машин: учеб. для вузов. - 3-е изд., перераб. и доп. - М.: Высш. шк., 2001. - 327 с.: ил.). Модель включает в себя сумматоры 42-51, умножители 52-74, делители 75-78, интеграторы 79-83, масштабирующие звенья 84, 85 (фиг.3).
Генератор функций чувствительности состоит из формирователя воздействий F1, F2, F3, F4, F5 86, сумматоров 87-98, умножителей 99-129, делителей 130-133, интеграторов 134-138, масштабирующих звеньев 139, 140 (фиг.4).
На первые входы умножителей 53, 59, 100, 106 подается внешний сигнал частоты вращения системы ортогональных координат.
Первые входы умножителей 56, 62, 103, 109 соединены с выходом интегратора 11, первые входы умножителей 69, 74, 116, 125 соединены с выходом интегратора 16, первые входы умножителей 55, 61, 68, 72, 102, 108, 115, 120, 123, 129 и делителей 75-78, 130-133 соединены с выходом интегратора 21, первые входы умножителей 52, 54, 58, 60, 64, 65, 67, 70, 73, 99, 101, 105, 107, 111, 112, 114, 117, 121, 124, 126 соединены с выходом интегратора 26, инвертирующий вход сумматора 47 соединен с выходом интегратора 31.
Инвертирующие входы сумматора 43 соединены с выходами умножителей 54, 56. Инвертирующие входы сумматора 45 соединены с выходами умножителей 59, 60, 62. Инвертирующие входы сумматора 49 соединены с выходами умножителей 66, 67. Инвертирующие входы сумматора 51 соединены с выходами умножителей 71, 73, 74. Неинвертирующие входы сумматора 43 соединены с выходом умножителя 53 и первым выходом преобразователя напряжений статора 39. Неинвертирующий вход сумматора 45 соединен со вторым выходом преобразователя напряжений статора 39.
Неинвертирующий вход сумматора 49 соединен с выходом умножителя 69, второй вход которого соединен с выходом интегратора 82.
Выходы сумматоров 43, 45, 49, 51 соединены соответственно со вторыми входами делителей 75-78. Выходы делителей 75-78 соединены соответственно со вторым входом умножителя 67 и входом интегратора 79, со вторым входом умножителя 73 и входом интегратора 80, со вторым входом умножителя 54 и входом интегратора 82, со вторым входом умножителя 60 и входом интегратора 83.
Выход интегратора 79 соединен со вторыми входами умножителей 56, 57, 61, 70. Выход интегратора 80 соединен со вторыми входами умножителей 55, 62, 63, 65. Выход интегратора 82 соединен со вторыми входами умножителей 58, 62, 69, 72. Выход интегратора 83 соединен со вторыми входами умножителей 52, 57, 68, 74.
Выходы умножителей 52, 55 соединены с неинвертирующими входами сумматора 42. Выходы умножителей 58, 61 соединены с неинвертирующими входами сумматора 44. Выходы умножителей 65, 68 соединены с неинвертирующими входами сумматора 48. Выходы умножителей 70, 72 соединены с неинвертирующими входами сумматора 50.
Выходы сумматоров 42, 44, 48, 50 соединены со вторыми входами умножителей 53, 59, 66, 71 соответственно.
Выход умножителя 63 соединен с неинвертирующим входом сумматора 46, инвертирующий вход которого соединен с выходом умножителя 57.
Выход сумматора 64 соединен с входом масштабирующего звена 84, выход которого соединен с неинвертирующим входом сумматора 47. Выход сумматора 47 соединен с входом масштабирующего звена 85, выход которого соединен с входом интегратора 81.
Выход интегратора 81 соединен с инвертирующим входом сумматора 41, выход которого соединен первыми входами умножителей 66, 71, 113, 122. Выход интегратора 79 соединен с входами умножителей 126, 127. Выход интегратора 80 соединен с входами умножителей 117, 118. Выход интегратора 82 соединен с входами умножителей 110, 129. Выход интегратора 83 соединен с входами умножителей 104, 120.
Инвертирующие входы сумматора 88 соединены с выходами умножителей 101, 103. Инвертирующие входы сумматора 90 соединены с выходами умножителей 106, 107, 109. Инвертирующие входы сумматора 94 соединены с выходами умножителей 114, 116. Инвертирующие входы сумматора 97 соединены с выходами умножителей 122, 124, 125, 128.
Неинвертирующие входы сумматора 88 соединены с выходом умножителя 100 и первым выходом формирователя воздействий F1-F5 86. Неинвертирующий вход сумматора 90 соединен с третьим выходом формирователя воздействий F1-F5 86. Неинвертирующие входы сумматора 94 соединены с выходами умножителей 113, 119 и вторым выходом формирователя воздействий F1-F5 86. Неинвертирующий вход сумматора 97 соединен с первым выходом формирователя воздействий F1-F5 86.
Выходы сумматоров 88, 90, 94, 97 соединены со вторыми входами делителей 130-133 соответственно. Выходы делителей 130-133 соединены соответственно со вторым входом умножителя 114 и входом интегратора 134, со вторым входом умножителя 124 и входом интегратора 135, со вторым входом умножителя 101 и входом интегратора 137, со вторым входом умножителя 107 и входом интегратора 138.
Выход интегратора 134 соединен со вторыми входами умножителей 103, 104, 108, 121. Выход интегратора 135 соединен со вторыми входами умножителей 102, 109, 110, 112. Выход интегратора 137 соединен со вторыми входами умножителей 105, 116, 118, 123. Выход интегратора 138 соединен со вторыми входами умножителей 99, 115, 125, 127.
Выходы умножителей 99, 102 соединены с неинвертирующими входами сумматора 87. Выходы умножителей 105, 108 соединены с неинвертирующими входами сумматора 89. Выходы умножителей 112, 115 соединены с неинвертирующими входами сумматора 93. Выходы умножителей 121, 123 соединены с неинвертирующими входами сумматора 96.
Выходы сумматоров 87, 89, 93, 96 соединены со вторыми входами умножителей 100, 106, 113, 122 соответственно.
Выходы умножителей 117, 120 соединены с неинвертирующими входами сумматора 95, выход которого соединен с первым входом умножителя 119. Выходы умножителей 126, 129 соединены с неинвертирующими входами сумматора 98, выход которого соединен с первым входом умножителя 128. Выходы умножителей 104, 127 соединены с инвертирующими входами сумматора 91, неинвертирующие входы которого соединены с выходами умножителей 110, 118.
Выход сумматора 91 соединен со вторым входом умножителя 111, выход которого соединен с входом масштабирующего звена 139.
Выход масштабирующего звена 139 соединен с неинвертирующим входом сумматора 92, второй неинвертирующий вход которого соединен с пятым выходом формирователя воздействий F1-F5 86.
Выход сумматора 92 соединен с входом масштабирующего звена 140, выход которого соединен с входом интегратора 136. Выход интегратора 136 соединен со вторыми входами умножителей 119, 128.
Устройство оценивания параметров и процессов асинхронного электродвигателя работает следующим образом.
В процессе функционирования асинхронного электродвигателя датчики фазных напряжений 32, 33, 34 вырабатывают сигналы фазных напряжений статора u1A, u1B, u1C, датчики фазных токов 35, 36, 37 вырабатывают сигналы фазных токов статора i1A, i1B, i1C. В блоке преобразования координат 3 интегратором 38 осуществляется вычисление угла поворота системы координат α1 путем интегрирования сигнала частоты вращения системы ортогональных координат ω1, поступающего от системы управления электропривода. На выходе сумматора 41 формируется сигнал частоты скольжения ω2. Преобразователем фазных напряжений статора 39 выполняется преобразование фазных напряжений статора u1A, u1B, u1C в напряжения u1d, u1q. Преобразователем фазных токов статора 40 выполняется преобразование фазных токов статора i1A, i1B, i1C в токи i1d0, i1q0.
Сигналы напряжений u1d, u1q поступают на второй и третий входы настраиваемой модели асинхронного электродвигателя соответственно. На выходах продольного и поперечного токов статора настраиваемой модели асинхронного электродвигателя формируются сигналы, пропорциональные токам i1d, i1q модели. Эти сигналы поступают на инвертирующие входы сумматоров 5, 6, на неинвертирующие входы которых поступают сигналы с выходов преобразователя токов статора 40, пропорциональные токам i1d0, i1q0 асинхронного электродвигателя.
Разность Δi1d=i1d0-i1d поступает на первые входы умножителей 8, 13, 18, 23, 28. На их вторые входы приходят сигналы с первых выходов генераторов функций чувствительности 7, 12, 17, 22, 27 соответственно, пропорциональные функциям чувствительности тока i1d по параметрам асинхронного электродвигателя:

Разность Δi1q=i1q-i1q, поступает на первые входы умножителей 9, 14, 19, 24, 29. На их вторые входы приходят сигналы со вторых выходов генераторов функций чувствительности 7, 12, 17, 22, 27 соответственно, пропорциональные функциям чувствительности тока i1q по параметрам асинхронного электродвигателя:
Выходные сигналы умножителей 8, 9 суммируются сумматором 10, а полученная сумма  поступает на вход интегратора 11. Он вырабатывает оценку параметра активного сопротивления фазы обмотки статора R1.
поступает на вход интегратора 11. Он вырабатывает оценку параметра активного сопротивления фазы обмотки статора R1.
Выходные сигналы умножителей 13, 14 суммируются сумматором 15, а полученная сумма  поступает на вход интегратора 16. Он вырабатывает оценку параметра активного сопротивления фазы обмотки ротора R2.
поступает на вход интегратора 16. Он вырабатывает оценку параметра активного сопротивления фазы обмотки ротора R2.
Выходные сигналы умножителей 18, 19 суммируются сумматором 20, а полученная сумма µL[S(i1d,L)Δi1d+S(i1q,L)Δi1q] поступает на вход интегратора 21. Он вырабатывает оценку параметра индуктивности фазы обмотки статора и ротора L.
Выходные сигналы умножителей 23, 24 суммируются сумматором 25, а полученная сумма  поступает на вход интегратора 26. Он вырабатывает оценку параметра взаимной индуктивности Mm.
поступает на вход интегратора 26. Он вырабатывает оценку параметра взаимной индуктивности Mm.
Выходные сигналы умножителей 28, 29 суммируются сумматором 30, а полученная сумма  поступает на вход интегратора 31. Он вырабатывает оценку параметра статического момента Mс.
поступает на вход интегратора 31. Он вырабатывает оценку параметра статического момента Mс.
Умножители на постоянные коэффициенты  на фиг.1 не показаны.
на фиг.1 не показаны.
С выходов интеграторов 11, 16, 21, 26, 31 оценки параметров R1 R2, L, Mm, Mс поступают на информационные входы настраиваемой модели асинхронного электродвигателя 4 и на входы генераторов функций чувствительности 7, 12, 17, 22, 27.
Сигналы на информационных выходах настраиваемой модели асинхронного электродвигателя 4 являются оценками процессов токов ротора i2d(t), i2q(t) и частоты вращения асинхронного электродвигателя ω(t).
Поясним работу устройства с помощью известных в теории обобщенных электрических машин уравнений асинхронного электродвигателя в осях d, q:
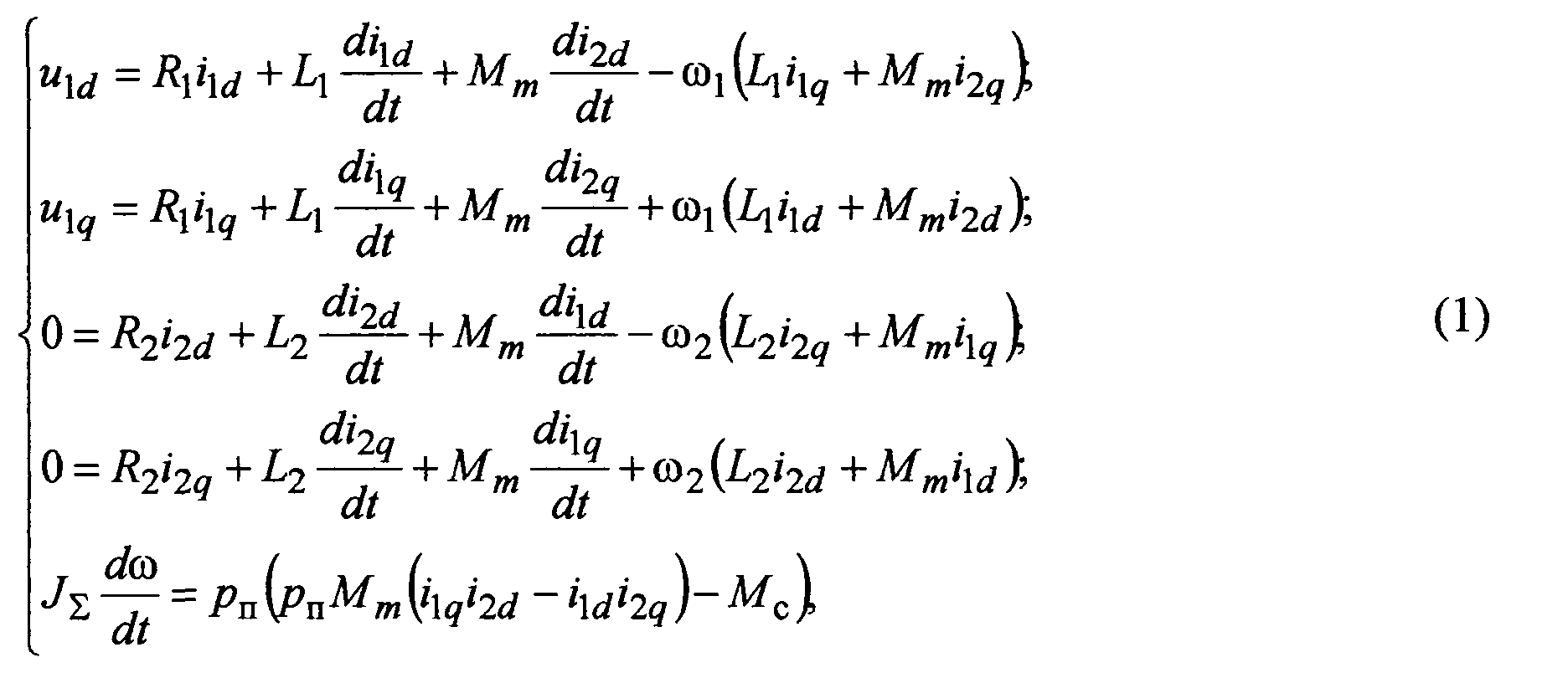
где pп - число пар полюсов; Mс - статический момент; ω1 - частота вращения системы координат d, q, эл. рад/с; ω2 - частота скольжения.
Следует отметить, что система (1) записана при условии, что величины и параметры ротора приведены к статору.
Условимся истинные значения параметров реального асинхронного электродвигателя обозначать R1o, L1o, R2o, L2o, Mmo, JΣo, Mco, а оценки параметров условимся обозначать R1, L1, R2, L2, Mm, JΣ, Mc.
При истинных значениях всех параметров система (1) принимает вид
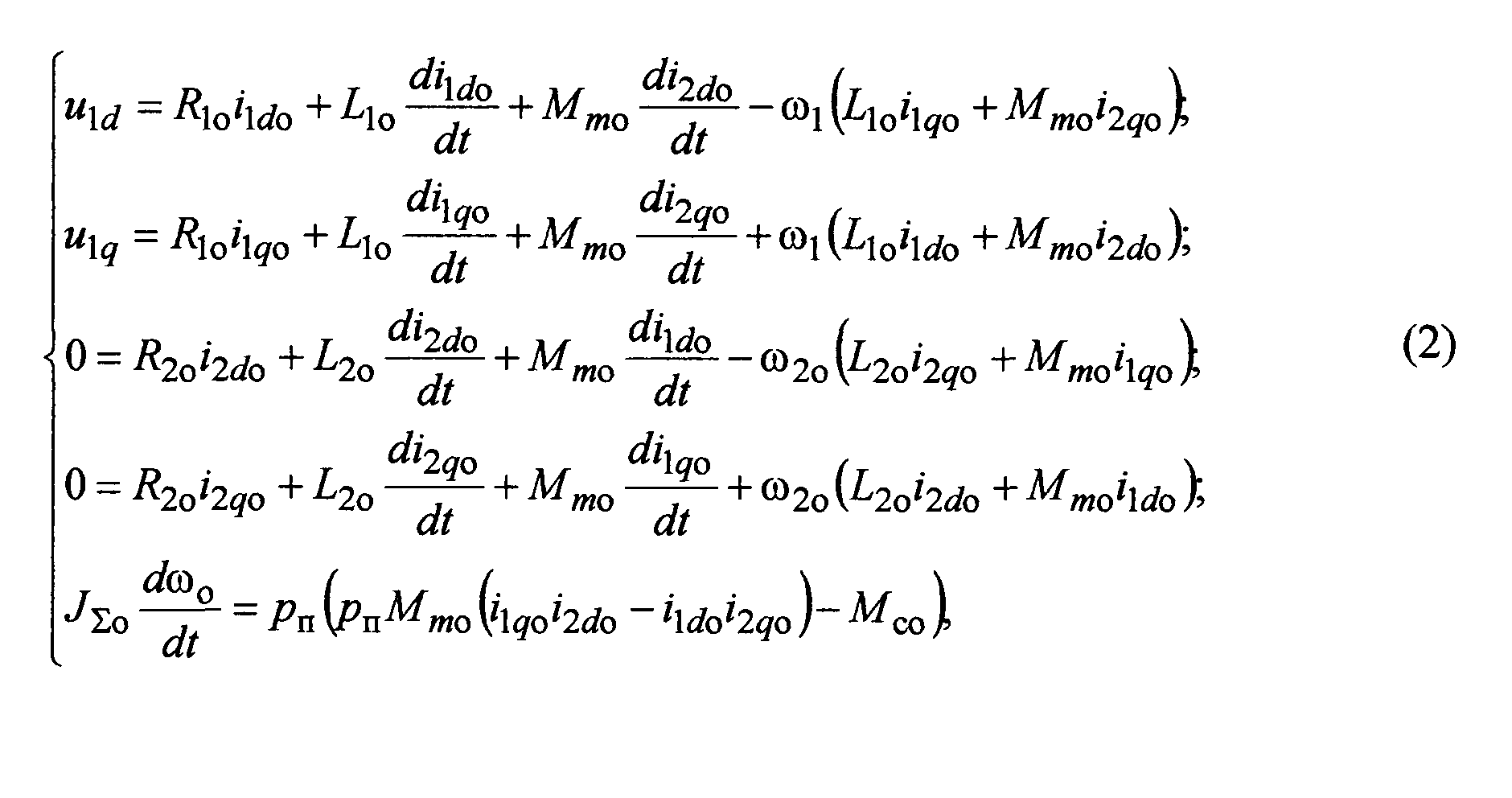
где i1do(t), i1qo(t), i2do(t), i2qo(t), ω2o(t), ωo(t) - функции, найденные при движении реального асинхронного электродвигателя с истинными значениями параметров.
Тогда на интервале времени t∈[t0, tf] предполагаются известными функции i1d(t), i1q(t), i1do(t), i1qo(t) движении реального асинхронного электродвигателя с параметрами R1o, L1o, R2o, L2o, Mmo, JΣo, Mco. Требуется найти оценки параметров R1, L1, R2, L2, Mm, Mc, a также оценку частоты вращения ω(t). Таким образом, необходима идентификация параметров и частоты вращения асинхронного электродвигателя.
Предлагается метод, основанный на генерировании функций чувствительности токов фаз статора обобщенной машины по параметрам асинхронного электродвигателя.
Традиционно приведение параметров ротора асинхронного электродвигателя к статору осуществляется таким образом, что число витков фазы обмотки статора w1 равно числу витков фазы обмотки ротора w2. При таком подходе индуктивность от основного потока статора будет численно равна индуктивности от основного потока ротора, а индуктивности фаз статора и ротора от потоков рассеяния окажутся различными. Таким образом, в процессе идентификации необходимо оценивать следующие пять параметров схемы замещения фазы асинхронного электродвигателя, а именно: R1, L1, R2, L2, Mm. Кроме того, идентификации подлежит также параметр Mc, поэтому общее количество идентифицируемых параметров равно шести.
В данном случае предлагается осуществлять приведение параметров ротора асинхронного электродвигателя к статору так, чтобы обеспечить равенство индуктивностей фаз статора L1 и ротора L2 (L1=L2=L). Отметим, что и при подобном подходе индуктивности фаз статора и ротора от потоков рассеяния будут различными. При этом количество параметров схемы замещения фазы асинхронного электродвигателя, подлежащих идентификации, сокращается до четырех. Наряду с этим идентификации подлежит также параметр Mc. Общее количество идентифицируемых параметров равно пяти.
Рассмотрим генерирование функций чувствительности на примере активного сопротивления R1. Если R2 получит единичное приращение, которое считается малым, то уравнения системы (1) примут вид:
где  - малые приращения, полученные соответствующими переменными величинами из-за вариации параметра.
- малые приращения, полученные соответствующими переменными величинами из-за вариации параметра.
Малые приращения  играют роль функций чувствительности переменных к изменению параметров, в данном случае к изменению активного сопротивления R1, т.е.
играют роль функций чувствительности переменных к изменению параметров, в данном случае к изменению активного сопротивления R1, т.е.



Вычитая из уравнений системы (1) соответственно уравнения системы (3), получаем, пренебрегая произведениями малых величин
Уравнения системы (7) позволяют генерировать функции чувствительности по активному сопротивлению фазы обмотки статора R1.
Аналогично можно показать, что функции чувствительности по активному сопротивлению фазы обмотки ротора R2 можно получить с помощью системы дифференциальных уравнений вида (7), где F1=0, F2=0, F3=-i2d, F4=-i2q, F5=0.
Функции чувствительности по индуктивности L можно получить с помощью системы дифференциальных уравнений вида (7), где

Функции чувствительности по взаимной индуктивности Mm можно получить с помощью системы дифференциальных уравнений вида (7), где

Функции чувствительности по статическому моменту Mc можно получить с помощью системы дифференциальных уравнений вида (7), где F1=0, F2=0, F3=0, F4=0, F5=pп.
Отметим, что системы уравнений, генерирующие функции чувствительности по параметрам R1, R2, L, Mm, Mс, отличаются лишь правыми частями, т.е. функциями F1-F5.
Составим систему дифференциальных уравнений относительно оценок параметров или, иначе говоря, определим скорости изменения оценок параметров:
где  - положительные коэффициенты, определяющие скорости изменения оценок параметров; Δi1d, Δi1q - погрешности по токам статора.
- положительные коэффициенты, определяющие скорости изменения оценок параметров; Δi1d, Δi1q - погрешности по токам статора.
Величины коэффициентов  выбираются согласно характеру сигналов i1d(t), i1q(t), ω1(t) и общим требованиям к электроприводу.
выбираются согласно характеру сигналов i1d(t), i1q(t), ω1(t) и общим требованиям к электроприводу.
Погрешности по токам статора вычисляются в соответствии с выражениями

Таким образом, систему уравнений обобщенной машины (1) можно рассматривать как математическую модель объекта идентификации, а системы уравнений (7)-(12) в совокупности с выражениями (13) - как математическую модель системы идентификации параметров асинхронного электродвигателя R1, L, R2, Mm и Mc.
Компьютерное моделирование процессов оценивания параметров и величин асинхронного электродвигателя в системе Turbo Pascal 7.0 подтвердило работоспособность и эффективность предлагаемого устройства.
Моделирование проводилось при условии, что напряжения u1d(t), u1q(t) и сигнал частоты вращения системы ортогональных координат ω1(t) изменяются во времени по законам:


Результаты компьютерного моделирования процессов идентификации параметров обобщенной электрической машины на основе трехфазного асинхронного электродвигателя приведены на фиг.5-8.
Для графического представления результатов идентификации введены относительные оценки параметров:

Кривые переходных процессов идентификации параметров получены при начальном отклонении оценок всех параметров от истинных значений на 50%. Отметим, что начальные отклонения оценок параметров R1, L, Mm, Mc принимались на 50% больше истинных значений, а начальное отклонение оценки параметра R2 на 50% меньше истинного значения. Видно, что длительность процессов идентификации составляет 40 секунд, после чего все параметры достигают своих истинных значений.
Начальные значения оценок параметров отмечены кружками.
Очевидно, что при завершении процессов оценивания и достижении перечисленными параметрами их истинных значений графики 
 выходят на уровень, соответствующий единице.
выходят на уровень, соответствующий единице.
Относительная погрешность идентификации параметров не превышает 0,8%, а относительная погрешность идентификации частоты вращения составляет 0,0005%.
Таким образом, предлагаемое устройство позволяет оценивать параметры, переменные величины и частоту вращения асинхронного электродвигателя без использования датчиков частоты вращения и углового ускорения, что приводит к расширению области применения изобретения. По сравнению с прототипом устройство имеет более высокую помехозащищенность, обусловленную отсутствием необходимости дифференцирования токов.
Устройство оценивания параметров и процессов асинхронного электродвигателя, включающее в себя соединенный с трехфазным асинхронным электродвигателем блок датчиков фазных напряжений и фазных токов, состоящий из первого-третьего датчиков фазных напряжений и первого-третьего датчиков фазных токов, блок преобразования координат, состоящий из первого интегратора, первого сумматора, преобразователя фазных напряжений и преобразователя фазных токов статора, первые, третьи, четвертые входы преобразователя фазных напряжений и преобразователя фазных токов статора соединены с выходами первого-третьего датчиков фазных напряжений и выходами первого-третьего датчиков фазных токов соответственно, входы которых соединены с асинхронным электродвигателем, отличающееся тем, что содержит настраиваемую модель асинхронного электродвигателя, второй и третий сумматоры, пять блоков вычисления оценок параметров, каждый блок вычисления оценки параметра включает в себя генератор функций чувствительности, два умножителя, один сумматор и один интегратор, при этом на входы генераторов функций чувствительности блоков вычисления оценок параметров, неинвертирующий вход первого сумматора и вход первого интегратора, выход которого соединен со вторыми входами преобразователя фазных напряжений статора и преобразователя фазных токов статора, подается внешний сигнал частоты вращения системы ортогональных координат, этот сигнал также подается на вход настраиваемой модели асинхронного электродвигателя, входы напряжений настраиваемой модели асинхронного электродвигателя соединены с выходами преобразователя фазных напряжений статора, вход частоты скольжения настраиваемой модели асинхронного электродвигателя и входы генераторов функций чувствительности блоков вычисления оценок параметров соединены с выходом первого сумматора, выход частоты вращения ротора настраиваемой модели асинхронного электродвигателя соединен с инвертирующим входом первого сумматора, а ее информационные входы соединены с выходами интеграторов блоков вычисления оценок параметров, токовые выходы настраиваемой модели асинхронного электродвигателя соединены с токовыми входами генераторов функций чувствительности блоков вычисления оценок параметров, выходы продольного и поперечного токов статора настраиваемой модели асинхронного электродвигателя соединены с инвертирующими входами второго и третьего сумматоров соответственно, неинвертирующие входы которых соединены соответственно с первым и вторым выходами преобразователя фазных токов статора, а выходы соединены соответственно с первыми входами первого и второго умножителей блоков вычисления оценок параметров, вторые входы которых соединены с выходами генератора функций чувствительности соответствующего блока, а выходы умножителей соединены с первым и вторым неинвертирующими входами сумматора соответствующего блока, выходы которых соединены соответственно с входами интегратора соответствующего блока, выходы интеграторов блоков вычисления оценок параметров соединены с входами генераторов функций чувствительности блоков вычисления оценок параметров, а также с входами настраиваемой модели асинхронного электродвигателя.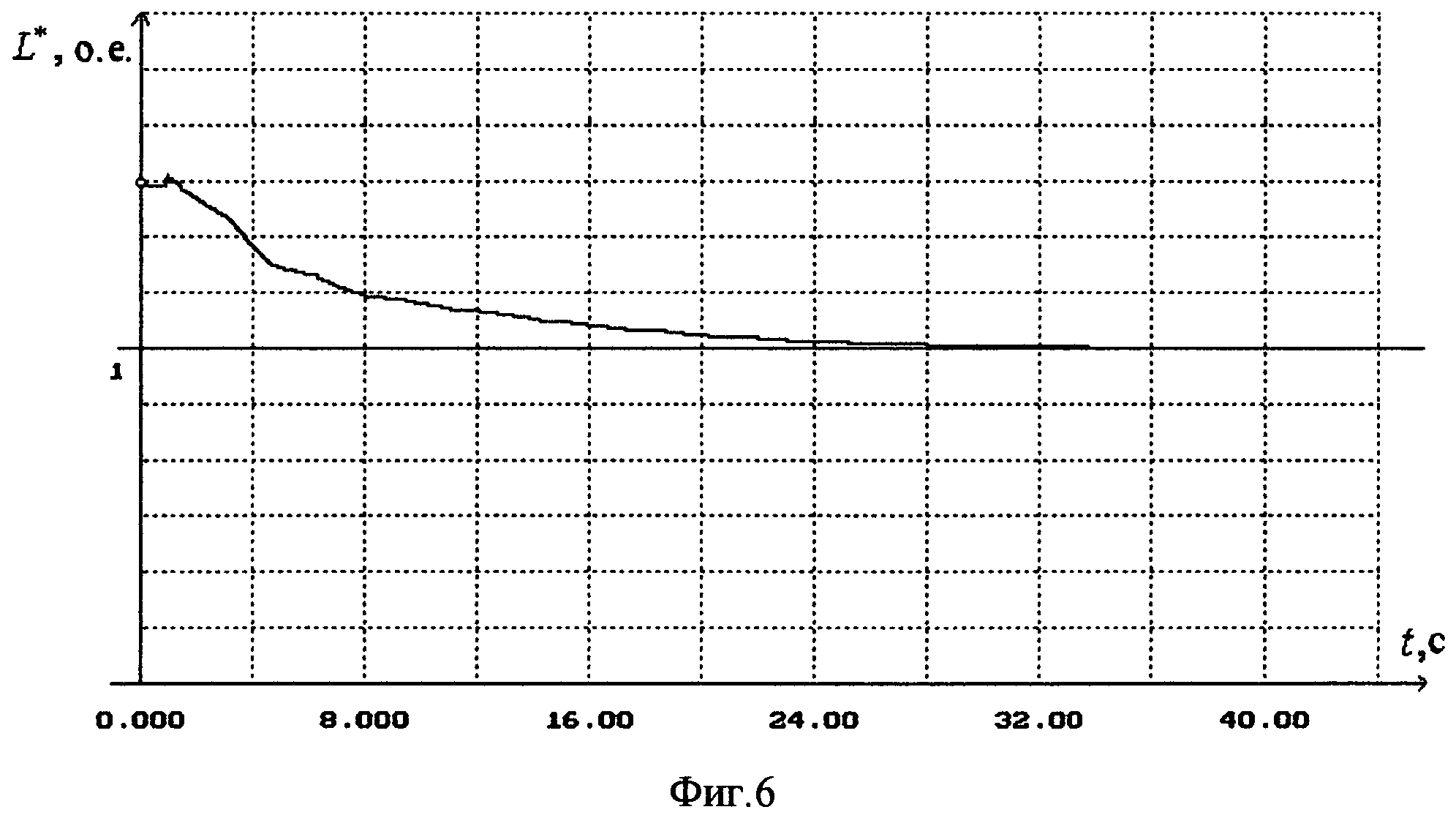
Синхронный электродвигатель с магнитной редукцией
Липосомальное средство на основе убихинола и способ его получения
Способ получения восстановленной формы коэнзима q10
Механический накопитель энергии с магнитным редуктором
Выпрямитель
Композиция с дезамино-аргинин-вазотоцином для парентерального введения и способ её получения
Управляемый выпрямитель
Композиция убихинола для парентерального введения и способ её получения
Способ получения экстракта из березового гриба чага
Способ получения противокоррозионного пигмента
Средство на основе биснафтазарина и способ его получения
Состав и способ получения анальгетического средства пептидной структуры
Мотор-колесо
Устройство оценивания параметров асинхронного двигателя
Твердая нанокомпозиция для доставки биологически активных веществ
Способ получения масляных экстрактов биологически активных веществ
Наноэмульсия с биологически активными веществами
Композиция с 6-декапренил-2,3-диметокси-5-метил-1,4-бензохиноном для парентерального введения и способ ее получения
Устройство оценивания параметров электродвигателя
Способ получения нанокомпозиции на основе сахаров

