Результат интеллектуальной деятельности: РАДИОЛОКАЦИОННЫЙ ДАТЧИК СКОРОСТИ СБЛИЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА С ПРЕПЯТСТВИЕМ
Вид РИД
Изобретение
Изобретение относится к области ближней радиолокации и может быть использовано в системах фазовой автоподстройки (ФАП) частоты в радиолокационном датчике доплеровского смещения частоты.
Известны радиолокационные датчики для определения скорости сближения движущегося объекта с препятствием (см. Патент РФ №2501034, МПК G01S 13/58, от 14.12.2011) Задача, решаемая в данном изобретении, заключается в повышении вероятности правильного измерения скорости приближения автомобиля к радиолокационной станции (РЛС) и уменьшении массогабаритных и стоимостных характеристик локаторов для государственной инспекции безопасности дорожного движения (ГИБДД). Указанный результат достигается за счет реализации локаторов с использованием более низкочастотного сигнала, излучаемого РЛС, и проведения измерения скорости приближения автомобиля к РЛС на более коротком и заранее известном интервале расстояния. Локатор для ГИБДД содержит РЛС измерения начальной скорости движущегося объекта, приемно-передающую антенну, которую устанавливают, при необходимости, на автомобиле ГИБДД и которая излучает непрерывный сигнал с частотной модуляцией по одностороннему пилообразному линейно возрастающему закону, и имеет преобразователь скорости перемещения автомобиля ГИБДД, выходы которого, так же как и выходы вычислителя скорости РЛС, подключены, соответственно, к первым и вторым входам схемы вычитания.
Недостатком данного датчика является статичность данных о срывах, не позволяющих производить корректировку системы с целью избегания этих срывов.
Наиболее близким по технической сущности к заявляемому изобретению является радиолокационный датчик скорости определения срывов слежения за фазой, основанный на математических моделях ФАП статистической динамики систем синхронизации, выбранный в качестве прототипа (см. Белов Л.А. Устройства формирования СВЧ-сигналов и их компоненты: учебное пособие. М.: Издательский дом МЭИ, 2010. стр.268), работающий в диапазоне частот 24 ГГц.
Датчик содержит высокостабильный генератор, блок фазовой автоподстройки частоты (ФАПЧ), выход которого подключен с генератору управляемого напряжения (ГУН), выход которого соединен со входом передающего канала, включающего умножитель частоты, выход которого через аттенюатор соединен с усилителем, связанного через дуплексер с приемо-передающей антенной, второй выход генератора управляющего напряжения соединен со входом приемного канала, включающего усилитель приемного канала, соединенного через умножитель частоты приемного канала с первым входом когерентного квадратурного приемника, второй вход которого соединен через дуплексер с антенной.
Датчик выполнен на серийных микросхемах. В канале радиопередающего устройства формируется немодулированный сигнал с частотой, стабилизированной высокостабильным (кварцевым) генератором, а отраженный от препятствия сигнал с доплеровским смещением частоты поступает на вход когерентного I/Q-приемника, где выделяются квадратурные составляющие I и Q для цифровой обработки.
Усилители формируют опорное колебание с частотой 24 ГГц.
В блоке фазовой автоподстройки использован корректирующий фильтр, который синтезируется таким образом, чтобы максимальная динамическая ошибка слежения за фазой сигнала не превышала заданные пределы. Уменьшение динамической ошибки слежения возможно за счет расширения полосы частот фильтра ФАПЧ, а это, в свою очередь, приводит к росту флуктуационной ошибки слежения за фазой.
Недостатком данного способа является выбор компромисса между флуктуационной и динамической ошибкой, т.е. нахождение некоторой оптимальной полосы частот фильтра.
Технической задачей, решаемой в изобретении, является повышение точности определения моментов срывов ФАПЧ и возможность их корректировки. Достигаемый технический результат изобретения - отслеживание моментов срыва слежения за фазой и ввода коррекции сигнала во избежание этих срывов.
Поставленная задача реализуется тем, что в радиолокационный датчик сближения движущегося объекта с препятствием, содержащий высокостабильный генератор, блок фазовой автоподстройки частоты (ФАПЧ), выход которого подключен к генератору управляемого напряжения (ГУН), один из выходов которого соединен с входом передающего канала, включающего умножитель частоты, выход которого через аттенюатор соединен с усилителем, связанного через дуплексер с приемо-передающей антенной, второй выход генератора управляемого напряжения соединен с входом приемного канала, включающего усилитель приемного канала, соединенного через умножитель частоты приемного канала с первым входом когерентного квадратурного приемника, второй вход которого соединен через дуплексер с приемо-передающей антенной, блок ФАПЧ содержит первый фазовый дискриминатор, блок смещения фазы, первый интегратор, сумматор, второй фазовый дискриминатор, пороговое устройство, блок коррекции обратной связи, третий фазовый дискриминатор, второй интегратор, четвертый фазовый дискриминатор, инвертор, фильтр, третий интегратор, детектор огибающей, при этом вход первого фазового дискриминатора соединен с первым выходом высокостабильного генератора, а выход соединен со входом первого интегратора, выход которого соединен с первым входом четвертого фазового дискриминатора и с входом сумматора, выход сумматора подключен к первому входу второго фазового дискриминатора, второй выход высокостабильного генератора соединен с входом третьего фазового дискриминатора, соединенного с входом второго интегратора, первый выход которого подключен ко второму входу сумматора, а второй выход второго интегратора соединен со вторым входом четвертого фазового дискриминатора, выход четвертого фазового дискриминатора соединен с входом инвертора, первый выход которого соединен с детектором огибающей подключенного ко второму входу второго фазового дискриминатора, второй выход инвертора соединен с фильтром, выход которого соединен через третий интегратор с первым входом блок коррекции, второй вход блока коррекции связан с первым выходом порогового устройства, выход блока коррекции соединен соответственно со вторым входом третьего фазового дискриминатора и через блок смещения фазы со вторым входом первого фазового дискриминатора, выход второго фазового дискриминатора соединен с входом порогового устройства, второй выход которого соединен с ГУН.
По существу радиолокационный датчик представляет собой систему из двух контуров, один из которых используется в контуре слежения за фазой, а другой - в контуре обнаружителя срыва слежения. За счет совместной обработки информации, получаемой с обоих дискриминаторов, удается отследить срывы слежения за фазой и ввода коррекции. Данному изобретению за счет совместной обработки информации, получаемой с обоих дискриминаторов, удается отследить моменты срыва слежения за фазой и ввести коррекцию так, чтобы избежать этих срывов.
Изобретение поясняется чертежами, где
- на фиг.1 изображен радиолокационный датчик скорости сближения движущегося объекта с препятствием,
- на фиг.2 показана зависимость коэффициента подавления Кпод от полной вероятности ошибки Рош при разных значениях фазы φ0(t). Кривые 1-5 соответствуют φ0: 0, π/20, π/10, 3π/20, π/5,
- на фиг.3 представлена зависимость фазы входного и опорного сигнала фазового дискриминатора традиционной ФАП от времени при Тф=200/fн,
- на фиг.4 представлена зависимость фазы входного и опорного сигнала фазового дискриминатора традиционной ФАП от времени при Тф=140/fн,
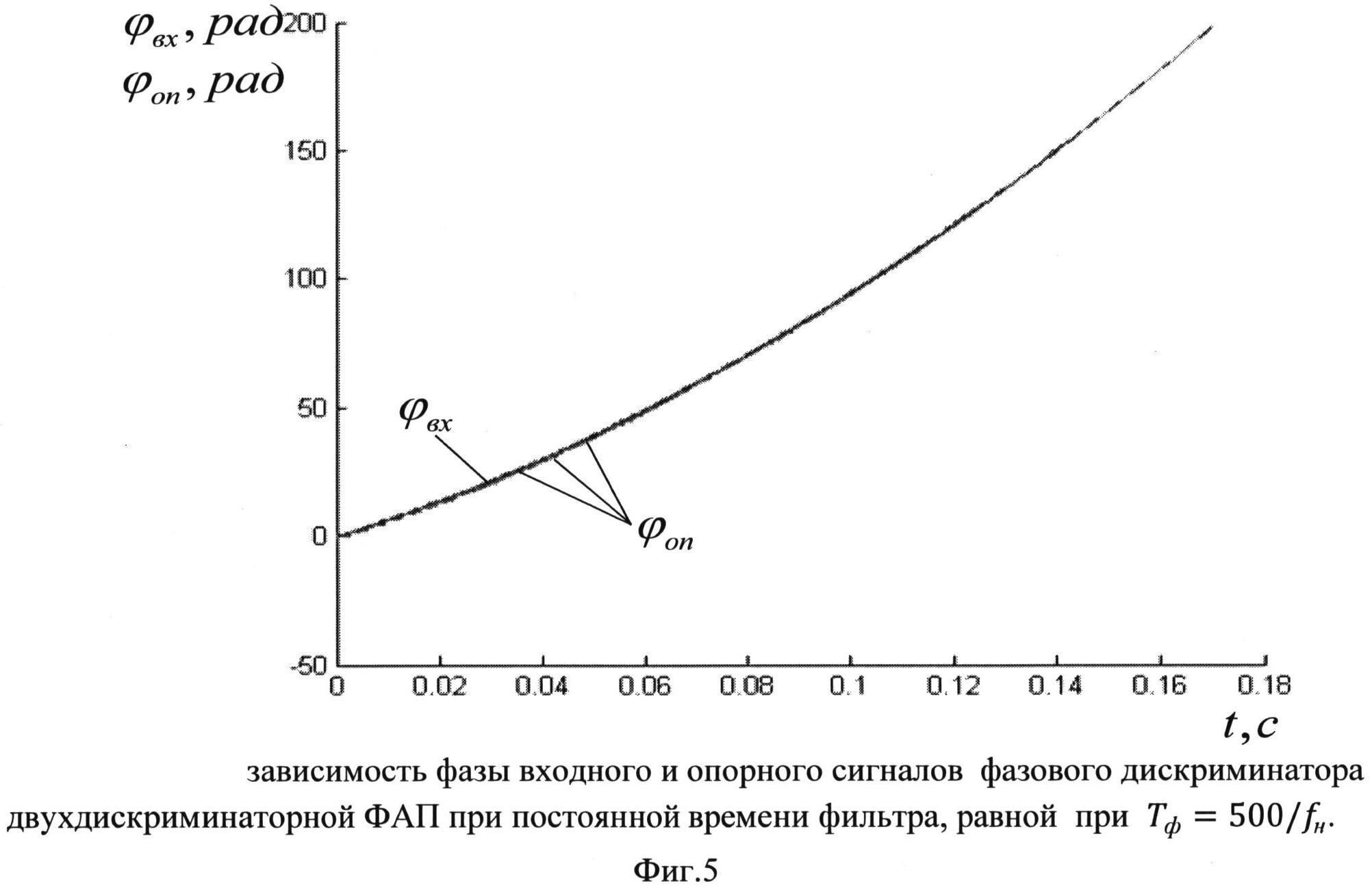
- на фиг.5 - представлена зависимость фазы входного и опорного сигналов фазового дискриминатора двухдискриминаторной ФАП при постоянной времени фильтра, равной Тф=500/fн.
Радиолокационный датчик скорости сближения движущегося объекта с препятствием содержит генератор 1, блок 2 фазовой автоподстройки частоты (ФАПЧ), выход которого подключен с генератору 3 управляемого напряжения (ГУН), один из выходов которого соединен с входом передающего канала, включающего умножитель 4 частоты, выход которого через аттенюатор 5 соединен с усилителем 6, связанного через дуплексер 7 с приемо-передающей антенной 8, второй выход генератора 3 управляющего напряжения соединен со входом приемного канала, включающего усилитель 9 приемного канала, соединенного через умножитель 10 частоты приемного канала с первым входом когерентного квадратурного приемника 11, второй вход последнего соединен через дуплексер 7 с приемо-передающей антенной 8. Блок 2 ФАПЧ содержит первый фазовый дискриминатор 12, блок смещения фазы 13, первый интегратор 14, сумматор 15, второй фазовый дискриминатор 16, пороговое устройство 17, блок 18 коррекции обратной связи, третий фазовый дискриминатор 19, второй интегратор 20, четвертый фазовый дискриминатор 21, инвертор 22, фильтр 23, третий интегратор 24, детектор огибающей 25.
При этом вход первого фазового дискриминатора 12 соединен с первым выходом высокостабильного генератора 1, а выход соединен со входом первого интегратора 14, выход которого соединен с первым входом четвертого фазового дискриминатора 21 и с входом сумматора 15, выход сумматора подключен к первому входу второго фазового дискриминатора 16, второй выход высокостабильного генератора 1 соединен с входом третьего фазового дискриминатора 19, соединенного с входом второго интегратора 20, первый выход которого подключен ко второму входу сумматора, а второй выход второго интегратора 20 соединен со вторым входом четвертого фазового дискриминатора 21, выход четвертого фазового дискриминатора 21 соединен с входом инвертора 22, первый выход которого соединен с детектором огибающей 25 подключенного ко второму входу второго фазового дискриминатора 16, второй выход инвертора соединен с фильтром 23, выход которого соединен через третий интегратор 24 с первым входом блок коррекции 18, второй вход блока коррекции 18 связан с первым выходом порогового устройства 17, выход блока коррекции 18 соединен соответственно со вторым входом третьего фазового дискриминатора 19 и через блок 13 смещения фазы со вторым входом первого фазового дискриминатора 12, выход второго фазового дискриминатора 16 соединен с входом порогового устройства 17, второй выход которого соединен с ГУН 3.
Сущность изобретения заключается в следующем.
Рассмотрим ситуацию срыва слежения за фазой на примере схемы Костаса (см. (1) Шахтарин Б.И. Синхронизация в радиосвязи и радионавагации: учебное пособие. М.: Гелиос АРВ, 2007. (2) ГЛОНАСС. Принципы построения и функционирования, под ред. Петрова А.И., Харисова В.Н. М.: Радиотехника, 2005).
Интервал однозначности фазового дискриминатора для схемы Костаса равен ±π/4.
Пусть на входе ФАП присутствует сигнал X1(t)

где A - амплитуда сигнала, ω0 - циклическая частота несущего колебания, φ0(t) - рассогласование с фазой опорного сигнала.
Если величина φ0(t) превышает величину ±π/4, то система теряет устойчивость, и происходит срыв слежения по фазе. При этом все наблюдаемые параметры системы ФАП ведут себя так, будто на входе системы присутствует сигнал X2(t)

Таким образом, по поведению системы ФАП невозможно сделать однозначный вывод о том, имеется ли в данный момент срыв слежения за фазой сигнала X1(t), либо система ФАП работает стабильно, но на входе присутствует сигнал X2(t). Из чего можно сделать вывод, что оптимальным обнаружителем срыва слежения схемы ФАП является оптимальный различитель сигналов Х1(t) и X2(t).
Для синтеза оптимального различителя сигналов входной сигнал U(t) можно записать в следующем виде:
U(t)=θX1(t)+(1-θ)X2(t)+n(t)
где n(t) - белый гауссовский шум, θ - случайный параметр, принимающий значение 1 с вероятностью p и значение 0 с вероятностью 1-p.
Значению θ=1 соответствует режим корректного слежения за фазой, а значению θ=0 - состояние срыва слежения по фазе, когда петля системы ФАП оказывается неустойчивой.
Вероятность p зависит от соотношения полосы ФАП и флуктуации фазы входного сигнала.
Задача заключается в том, чтобы синтезировать систему, которая бы осуществляла бы различение сигналов X1(t) и X2(t) с минимальной полной вероятностью ошибки.
2. Синтез структурной схемы оптимального обнаружителя срыва слежения по фазе схемы ФАП производится в два этапа. Вначале на основании критерия минимума полной вероятности ошибки синтезируется схема оптимального обнаружителя срыва колебаний. Затем ставится задача оптимизации схемы с точки зрения минимизации вычислительных затрат.
Оптимальный обнаружитель срыва колебаний - это фактически оптимальный различитель сигналов (1) и (2). Структурную схему оптимального различителя сигналов можно определить из формулы для вычисления отношения правдоподобия ((3) Шахтарин Б.И. Обнаружение сигналов: учебное пособие. М.: Гелиос АРВ, 2006).
Запишем отношение правдоподобия  в виде [3]:
в виде [3]:
где T - интервал наблюдения, Э - энергия полезного сигнала, N0 - спектральная плотность мощности шума n(t).
Преобразуем числитель дроби (3) к виду:
где


Аналогично получим значение для знаменателя выражения (3)
Подставив выражения (4) и (7) в соотношение (3), получим:
Последнее выражение можно переписать в виде:

где l0 - величина порога, с которым сравнивается решающая статистика.
Прологарифмировав правую и левую часть выражения (8), получим:

Из выражения (9) можно получить алгоритм работы оптимального различителя сигналов при когерентном приеме:

где h - величина порога после нормировки.
Этот алгоритм приводит к структурной схеме, приведенной на фиг.1, в которой сравнение решающей статистики с порогом происходит в блоке 17 пороговом устройстве (ПУ). В блоке 12 использован первый фазовый дискриминатор, в блоке 13 производится смещение сигнала на π/2, в блоке 14 производится интегрирование. С выхода первого интегратора 14 сигнал подается на четвертый фазовый дискриминатор 21 и на сумматор 15, с выхода сумматора сигнал подается на второй фазовый дискриминатор 16, поступает на пороговое устройство 17 и далее поступает в блок коррекции обратной связи 18. С выхода блока 18 сигнал поступает на третий фазовый дискриминатор 19 и на блок смещения фазы 13. Выход третьего фазового дискриминатора соединен со вторым интегратором 20. Выход второго интегратора 20 соединен с сумматором 15 и с четвертым фазовым дискриминатором 21, выход четвертого фазового дискриминатора 21 соединен с входом инвертора 22, выход которого соединен через блок 25, использующий функцию  (детектор огибающей), с блоком 16, также выход инвертора 22 соединен через фильтр 23 с третьим интегратором 24 и далее подается на блок 18 коррекции обратной связи.
(детектор огибающей), с блоком 16, также выход инвертора 22 соединен через фильтр 23 с третьим интегратором 24 и далее подается на блок 18 коррекции обратной связи.
Схема обнаружителя срыва слежения по фазе использует оценку фазы φ0 от системы ФАП и производит вычисление величины cosφ0-sinφ0, что приводит к дополнительным вычислительным затратам.
С целью уменьшения вычислительных затрат можно преобразовать выражение cosφ0-sinφ0 так, чтобы для его вычисления использовать сигнал с выхода фазового дискриминатора (ФД) схемы Костаса UФД~sin 2φ0. Для этого необходимо выразить разность cosφ0-sinφ0 через sin 2φ0

Так как  , то
, то
 .
.
Еще большего снижения вычислительных затрат можно достичь, если обратить внимание на то, что выражения (5) и (6) полностью совпадают с формулами сигналов в квадратурном и синфазном канале дискриминатора схемы Костаса [1]. Таким образом, обнаружитель срывов слежения за фазой для своей работы может использовать сигналы с выхода синфазного и квадратурного каналов дискриминатора схемы Костаса, а не производить их вычисления самостоятельно.
Для того чтобы получить структурную схему двухдискриминаторной ФАП необходимо включить в схему Костаса оптимальный обнаружитель срыва слежения и внести в цепь обратной связи блок 18 - блок коррекции обратной связи (БКОС). В блоке 15 использована - 1, в блоке 16 - Кф(р) и в блоке 17 - 1/р.
БКОС, получая информацию о факте срыва слежения, сдвигает фазу опорного сигнала на заданную величину (например, на ±π/4 для схемы Костаса).
3. Анализ помехоустойчивости оптимального обнаружителя срыва слежения по фазе
Под помехоустойчивостью системы понимают ее возможность работы в условиях воздействия внешних помех. В качестве характеристики помехоустойчивости часто принимают граничное (наибольшее) значение отношения мощности помехового сигнала к мощности полезного сигнала Кпод=Рпом/Р, при котором система еще может решать целевую задачу с заданными характеристиками [2]. Здесь Р - мощность полезного сигнала, Рпом - мощность помехи в полосе частот полезного сигнала, Кпод - коэффициент подавления [2].
В нашем случае целевой задачей обнаружителя является правильное обнаружение факта срыва слежения за фазой с полной вероятностью ошибки, не превышающей заданную величину.
Полная вероятность ошибки схемы складывается из двух составляющих:

где Рош(X1) - вероятность ложного обнаружения срыва слежения за фазой; Рош(X2) - вероятность пропуска факта срыва слежения за фазой, p - вероятность прихода сигнала X1.
Для определения Рош(X1) предположим, что на входе системы присутствует сигнал

Подставив последнее уравнение в решающую статистику (9) и учтя формулы (5) и (6), получим:

Ложное обнаружение срыва слежения за фазой происходит тогда, когда величина решающей статистики оказывается меньше порога. Вероятность такого события определяется выражением:

где  - условная плотность распределения вероятности величины q при условии, что на входе присутствует сигнал Х1(t), Z0=ln l0 - величина порога в выражении (9).
- условная плотность распределения вероятности величины q при условии, что на входе присутствует сигнал Х1(t), Z0=ln l0 - величина порога в выражении (9).
Анализируя уравнение (13), делаем вывод, что величина q распределена по гауссовскому закону, т.к. n(t) - гауссовская помеха, а интегрирование - линейная операция. Найдем ее математическое ожидание и дисперсию:



Аналогично можно получить математическое ожидание и дисперсию решающей статистики q, когда на входе присутствует сигнал U(t)=X2(t)+n(t):


Можно показать, что если сигналы X1(t) и X2(t) равновероятны (p=1/2), то величина порога Z0=0. Тогда вероятность ошибки Рош(X1) определится выражением

где  - интеграл вероятности.
- интеграл вероятности.
Аналогично можно показать, что

Подставив выражения (19) и (20) в выражение (11) и учтя условие равновероятности сигналов X1(t) и X2(t)(p=1/2), получим выражение для полной вероятности ошибки:

Выразим в последнем выражении множитель  через мощность полезного сигнала P и мощность помехи в полосе частот полезного сигнала РП:
через мощность полезного сигнала P и мощность помехи в полосе частот полезного сигнала РП:

С учетом (22) выражение (21) перепишется в виде:

На фиг.5 приведены графики зависимости коэффициента подавления Кпод от полной вероятности ошибки Рош при разных значениях рассогласования фазы принимаемого сигнала с фазой опорного сигнала φ0(t).
Из анализа графиков следует, что для получения более низкой полной вероятности ошибки необходимо увеличивать отношение сигнал/шум на входе обнаружителя срыва слежения.
Таким образом, вероятность ошибки, как и следовало ожидать, зависит от отношения сигнал/шум.
Из выражения (21) можно сделать вывод о том, что оптимальный обнаружитель срыва слежения не сможет работать при  , т.к. сигналы Х1(t) и Х2(t) оказываются коррелированны.
, т.к. сигналы Х1(t) и Х2(t) оказываются коррелированны.
Для сравнения характеристик традиционной и двухдискриминаторной схемы ФАП было произведено моделирование обеих схем при следующих условиях работы:
1) на вход системы подавался сигнал с частотой несущей fн=100 кГц и начальной фазой, изменяющейся по параболическому закону
y(tk)=cos(ωнt+φk),
 ,
,
где ωн=2πfн - циклическая частота несущего колебания, φk - текущее значение фазы входного сигнала, а и b - коэффициенты, определяющиеся моделью движения объекта, а φ0 - случайная величина, изменяющаяся в интервале [-π; π];
2) отношение сигнал/шум на входе -5 дБ;
3) передаточная характеристика фильтра Кф(p) в цепи обратной связи ФАП была выбрана исходя из обеспечения третьего порядка астатизма системы слежения [2]
 ,
,
где Кф - коэффициент усиления фильтра, Тф - постоянная времени фильтра.
На фиг.6 представлена фаза входного φвх и реализации опорного φоп сигнала традиционной схемы ФАП при отношении сигнал/шум на входе -5 дБ, постоянная времени фильтра равна Тф=200/fн.
В процессе моделирования было установлено, что из-за наличия шума на входе схемы срывы слежения происходят с вероятностью 52%. Для устранения этого явления следует расширить полосу фильтра.
На фиг.4 приведена работа традиционной схемы ФАП с фильтром с более широкой полосой (Тф=140/fн). Вероятность срыва слежения за фазой составляет менее 1%.
В процессе моделирования было установлено, что среднее квадратическое отклонение оценки фазы составляет 0,4 радиан.
Далее при аналогичных условиях было произведено моделирование двухдискриминаторной схемы ФАП.
На фиг. 5 согласно изобретения, представлена фаза входного и опорного сигнала двухдискриминаторной схемы ФАП при постоянной времени фильтра, равной Tф=500/fн.
В процессе моделирования было установлено, что среднее квадратическое отклонение оценки фазы составляет 0,15 радиан, т.е. по сравнению с традиционной схемой ФАП точность измерения фазы возросла в 2,7 раза.
Данное изобретение за счет совместной обработки информации, получаемой с обоих дискриминаторов, удается отследить моменты срыва слежения за фазой и ввести коррекцию так, чтобы избежать эти срывы.
Таким образом, изобретение позволяет повысить точность определения моментов срывов ФАПЧ, и достигается возможность их корректировки. Достигаемый технический результат изобретения - отслеживание моментов срыва слежения за фазой и ввода коррекции сигнала во избежание этих срывов.
Радиолокационный датчик сближения движущегося объекта с препятствием, содержащий высокостабильный генератор, блок фазовой автоподстройки частоты, выход которого подключен к генератору управляемого напряжения, один из выходов которого соединен с входом передающего канала, включающего умножитель частоты, выход которого через аттенюатор соединен с усилителем, связанного через дуплексер с приемо-передающей антенной, второй выход генератора управляемого напряжения соединен с входом приемного канала, включающего усилитель приемного канала, соединенного через умножитель частоты приемного канала с первым входом когерентного квадратурного приемника, второй вход которого соединен через дуплексер с приемо-передающей антенной, блок фазовой автоподстройки частоты содержит первый фазовый дискриминатор, блок смещения фазы, первый интегратор, сумматор, второй фазовый дискриминатор, пороговое устройство, блок коррекции обратной связи, третий фазовый дискриминатор, второй интегратор, четвертый фазовый дискриминатор, инвертор, фильтр, третий интегратор, детектор огибающей, при этом вход первого фазового дискриминатора соединен с первым выходом высокостабильного генератора, а выход соединен с входом первого интегратора, выход которого соединен с первым входом четвертого фазового дискриминатора и с входом сумматора, выход сумматора подключен к первому входу второго фазового дискриминатора, второй выход высокостабильного генератора соединен с входом третьего фазового дискриминатора, соединенного с входом второго интегратора, первый выход которого подключен ко второму входу сумматора, а второй выход второго интегратора соединен со вторым входом четвертого фазового дискриминатора, выход четвертого фазового дискриминатора соединен с входом инвертора, первый выход которого соединен с детектором огибающей, подключенного ко второму входу второго фазового дискриминатора, второй выход инвертора соединен с фильтром, выход которого соединен через третий интегратор с первым входом блока коррекции, второй вход блока коррекции связан с первым выходом порогового устройства, выход блока коррекции соединен соответственно со вторым входом третьего фазового дискриминатора и через блок смещения фазы со вторым входом первого фазового дискриминатора, выход второго фазового дискриминатора соединен с входом порогового устройства, второй выход которого соединен с генератором управляемого напряжения.
Дистанционный способ классификации нефтяных загрязнений на поверхности воды
Контактирующее устройство
Способ изготовления трехмерного электронного прибора
Способ управления возбуждением синхронного электрического генератора
Способ настройки параметров регулятора возбуждения синхронного электрического генератора
Способ создания эталонных образцов с заданным распределением напряжений
Система стабилизации положения рамы технологического агрегата
Устройство траекторного подрыва "молога" надкалиберных осколочных гранат к ручному гранатомету
Способ приготовления наносуспензии для изготовления полимерного нанокомпозита
Надкалиберная пучковая граната "торопа" к ручному гранатомету, предназначенная для поражения вертолетов
Дистанционный способ классификации нефтяных загрязнений на поверхности воды
Контактирующее устройство
Способ изготовления трехмерного электронного прибора
Способ управления возбуждением синхронного электрического генератора
Способ настройки параметров регулятора возбуждения синхронного электрического генератора
Способ создания эталонных образцов с заданным распределением напряжений
Система стабилизации положения рамы технологического агрегата
Устройство траекторного подрыва "молога" надкалиберных осколочных гранат к ручному гранатомету
Способ приготовления наносуспензии для изготовления полимерного нанокомпозита
Надкалиберная пучковая граната "торопа" к ручному гранатомету, предназначенная для поражения вертолетов

