Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ОШИБКИ ПРИ УПРАВЛЕНИИ ДВИЖЕНИЕМ ОБЪЕКТА С ЦЕЛЬЮ ВЫВОДА ЕГО НА ЗАДАННУЮ ТОЧКУ
Вид РИД
Изобретение
Изобретение относится к радионавигационным системам и может быть использовано в системах обеспечения посадки летательных аппаратов, в том числе беспилотных, а также в системах обеспечения судовождения. Кроме того, изобретение может быть использовано для обеспечения автоматического возвращения пожарного или иного робота, для обеспечения прицельного десантирования людей или грузов, для обеспечения прицельного сброса воды при тушении пожаров.
Известны способы формирования сигнала ошибки, применяемые в радиотехнических системах посадки самолетов для обеспечения движения самолета по заданной траектории снижения и приземления. [Бакулев П.А., Сосновский А.А. Радионавигационные системы. - М.: Радиотехника, 2011, с.159-181].
Для реализации известных способов летательный аппарат (ЛА) облучают радиосигналами, на борту ЛА сигналы принимают и преобразуют в сигналы угловых отклонений от заданной траектории. Параметры сигналов, содержащие информацию об угловых отклонениях ЛА, формируют с помощью специальных антенн радиомаяков. Обычно радиотехническая система посадки состоит из двух независимых каналов (курсового и глиссадного).
Наиболее близким аналогом заявляемого способа является равносигнальный способ определения отклонений от заданной траектории движения [Бакулев П.А., Сосновский А.А. Радионавигационные системы. - М.: Радиотехника, 2011, с.161-170]. Этот способ применяется в каждом из двух (курсовом и глиссадном) каналов.
В частности, для управления движением ЛА по курсу используют расположенный на оси взлетно-посадочной полосы курсовой равносигнальный радиомаяк.
Формируют два амплитудно-модулированных сигнала с одинаковой несущей частотой, отличающиеся частотами модуляции F1 и F2. Для этих двух сигналов формируют две неподвижные пересекающиеся диаграммы направленности антенной системы радиомаяка. Равносигнальное направление радиомаяка, соответствующее точке пересечения диаграмм направленности, направляют по линии курса, то есть по оси взлетно-посадочной полосы. ЛА облучают с помощью антенной системы двумя амплитудно-модулированными сигналами. На борту ЛА сигналы радиомаяка принимают и детектируют. Сигнал отклонения от линии курса (сигнал ошибки) формируют в зависимости от разности амплитуд полученных в результате детектирования сигналов частот F1 и F2.
Недостатком известного равносигнального способа является необходимость использования высоконаправленных антенных систем. Это приводит к значительным габаритам антенных систем, значительной их массе, к необходимости применения громоздких несущих конструкций и фундаментов для них, а также к невозможности быстрого развертывания антенной системы.
Изобретение направлено на решение задачи формирования сигнала ошибки при обеспечении вывода объекта на заданную точку без применения высоконаправленных антенн, что обеспечивает улучшение массогабаритных характеристик системы и существенное сокращение сроков ее развертывания.
Формирование сигнала ошибки при управлении движением объекта с целью вывода объекта на заданную точку происходит следующим образом.
Формируют первый и второй основные сигналы неравных частот и сигнал частоты сдвига.
Первый основной сигнал и сигнал частоты сдвига преобразуют в частотном преобразователе в первый дополнительный сигнал, частота которого сдвинута относительно частоты первого основного сигнала на частоту сигнала сдвига.
Второй основной сигнал и сигнал частоты сдвига преобразуют в частотном преобразователе во второй дополнительный сигнал, частота которого сдвинута относительно частоты второго основного сигнала на частоту сигнала сдвига.
На объекте управления основные сигналы принимают и преобразуют в основной сигнал разностной частоты, а дополнительные сигналы принимают и преобразуют в дополнительный сигнал разностной частоты.
В момент начала управления движением объекта определяют начальное значение разности фаз основного и дополнительного сигналов разностной частоты.
В последующие моменты определяют текущие значения разности фаз основного и дополнительного сигналов разностной частоты и формируют сигналы ошибки в зависимости от отклонений текущих значений разности фаз основного и дополнительного сигналов разностной частоты от начального значения разности фаз основного и дополнительного сигналов разностной частоты.
Пример реализации предлагаемого способа описан со ссылками на фиг.1, фиг.2, фиг.3 и фиг.4.
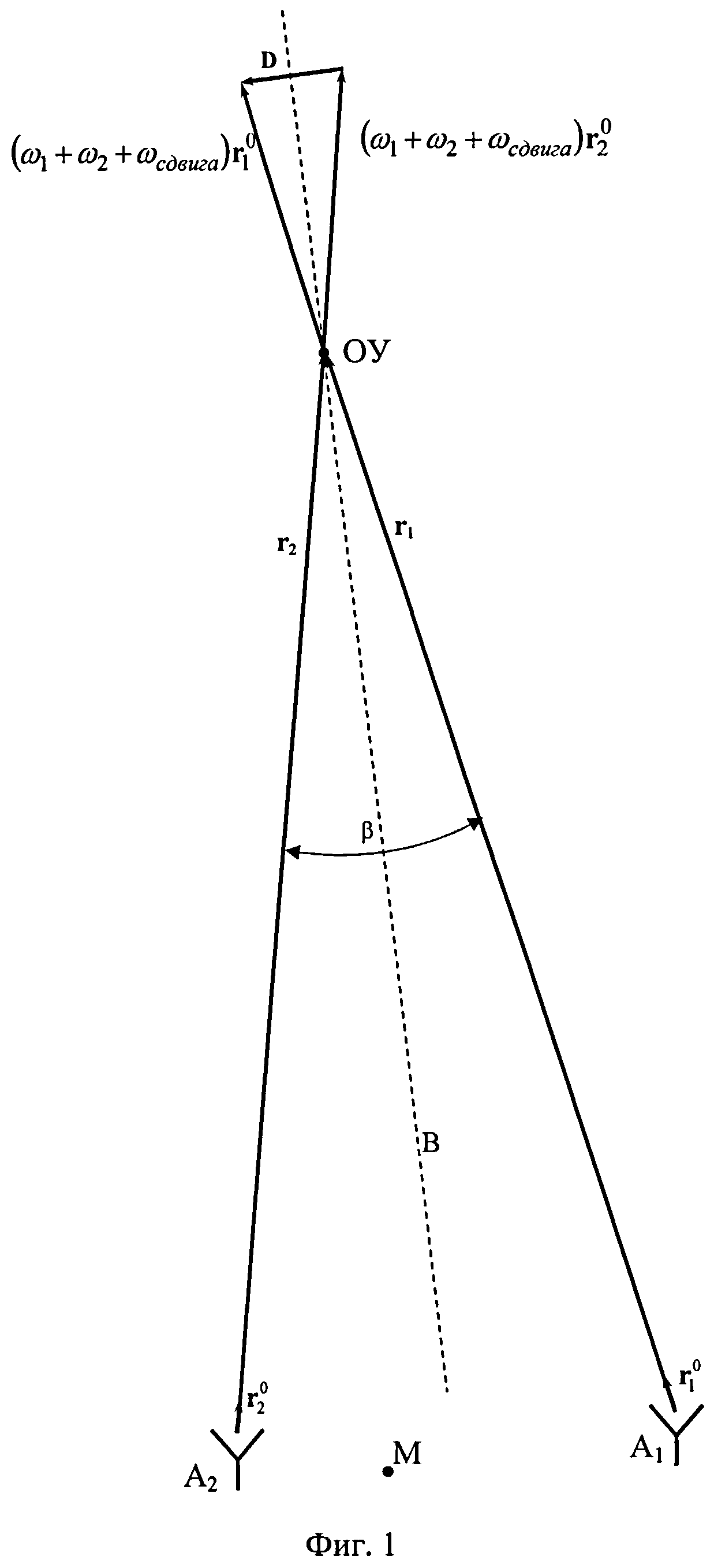
На фиг.1 представлена векторная диаграмма, позволяющая определить пространственное расположение линий равных разностей фаз основного и дополнительного сигналов разностной частоты.
На фиг.1 используются следующие обозначения:
A1 - передающая антенна первого радиомаяка, излучающая сигнал частоты ω1;
A2 - передающая антенна второго радиомаяка, излучающая сигнал частоты ω2;
M - точка, вблизи которой должна пройти траектория движения объекта управления (заданная точка);
ОУ - объект управления;
r1, r2 - векторы, начала которых находятся в точках расположения антенн A1 и A2, а концы - в точке расположения объекта управления;
β - угол между векторами r1 и r2;
B - биссектриса угла β;
 ,
,  - орты векторов r1 и r2.
- орты векторов r1 и r2.
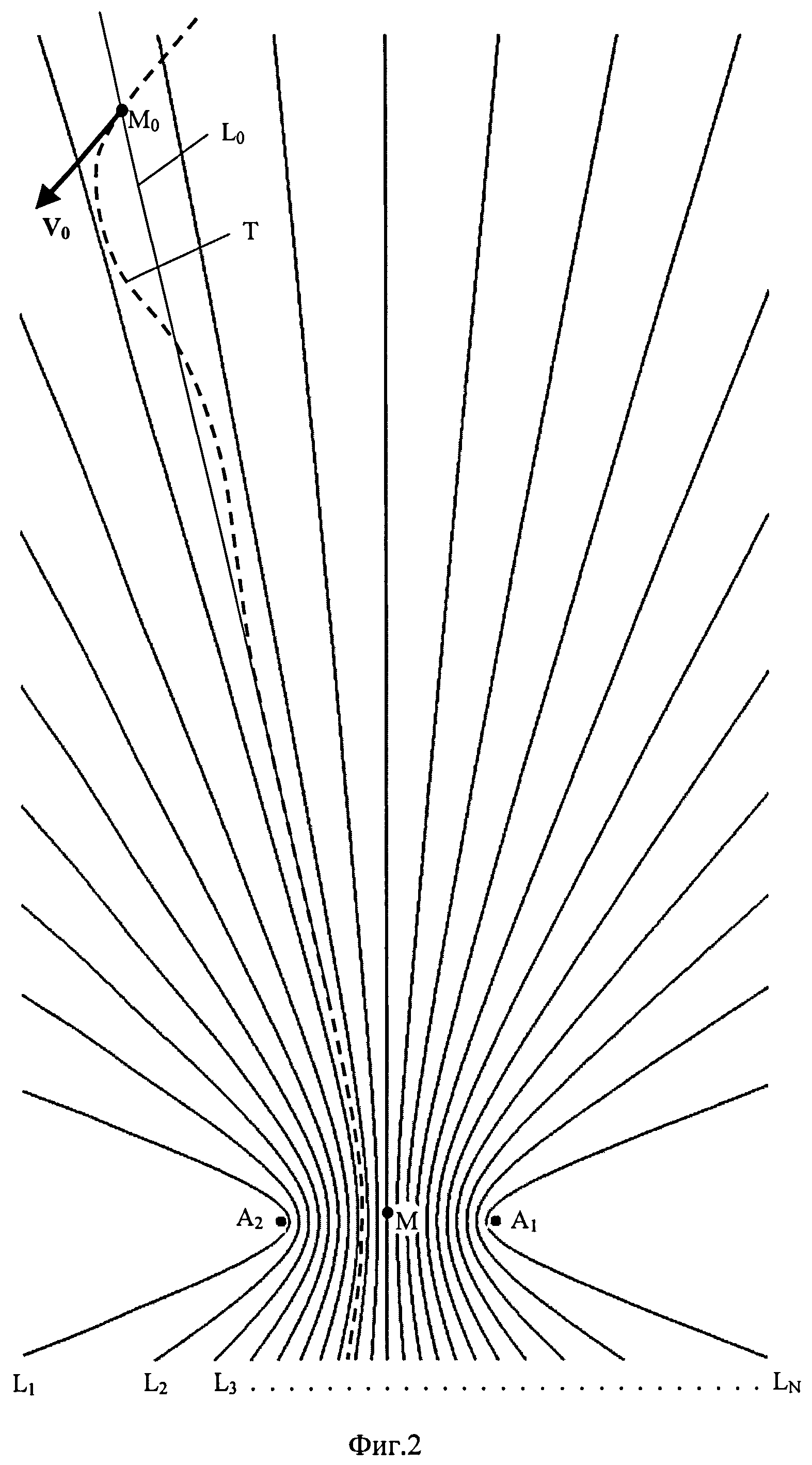
На фиг.2 показаны линии равных разностей фаз основного и дополнительного сигналов разностной частоты и траектория движения объекта управления.
На фиг.2 используются следующие обозначения:
A1 - точка расположения антенны первого радиомаяка;
A2 - точка расположения антенны второго радиомаяка;
L1, L2, L3, …, LN - линии равных фаз сигнала разностной частоты;
T - траектория движения объекта управления;
M0 - точка, в которой объект управления находился в момент начала управления движением объекта;
L0 - линия равных фаз, проходящая через точку M0;
M - точка, вблизи которой должна пройти траектория движения объекта управления (заданная точка);
V0 - вектор скорости объекта управления в момент начала управления.
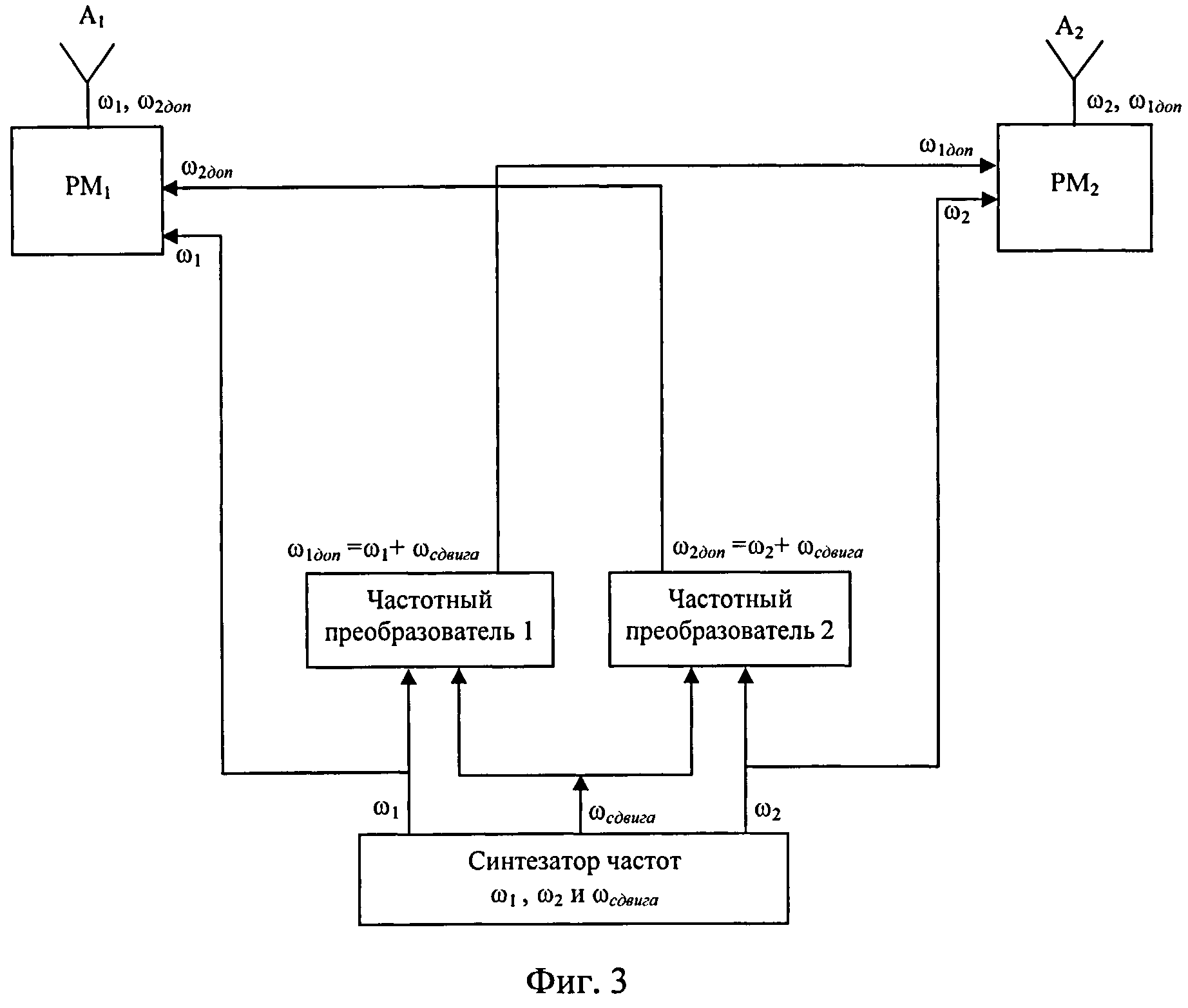
На фиг.3 приведен вариант функциональной схемы формирования сигналов радиомаяков.
На фиг.3 используются следующие обозначения:
PM1 - первый радиомаяк;
PM2 - второй радиомаяк;
A1 - передающая антенна первого радиомаяка, излучающая сигналы частот ω1 и ω2доп;
A2 - передающая антенна второго радиомаяка, излучающая сигнал частоты ω2 и ω1доп.
На фиг.4 приведен вариант функциональной схемы бортовой части системы формирования сигнала ошибки.
На фиг.4 используются следующие обозначения:
Aосн - антенна приемника основных сигналов частот ω1 и ω2;
Aдоп - антенна приемника дополнительных сигналов частот ω1доп и ω2доп.
Формирование сигнала ошибки происходит следующим образом.
Формируют первый и второй основные сигналы неравных частот ω1 и ω2 и сигнал частоты сдвига ωсдвига. Формирование сигналов может производиться в синтезаторе частот, как показано на фиг.3.
Мгновенные значения ψ1(t) и ψ2(t) фаз основных сигналов определяются выражениями:
ψ1(t)=ω1t-ψ01;
ψ2(t)=ω2t-ψ02,
где t - текущее время;
ψ01 - начальная фаза первого основного сигнала;
ψ02 - начальная фаза второго основного сигнала.
Мгновенные значения ψсдвига(t) фазы сигнала частоты сдвига определяются выражением:
ψсдвига(t)=ωсдвигаt-ψ0сдвига,
где ψ0сдвига - начальная фаза сигнала частоты сдвига.
Первый основной сигнал и сигнал частоты сдвига подают на частотный преобразователь и преобразуют в первый дополнительный сигнал, частота ω1доп которого сдвинута относительно частоты первого основного сигнала на частоту сигнала сдвига. Сдвиг может происходить либо с увеличением частоты либо с ее уменьшением. В частности, частота первого дополнительного сигнала может быть, как показано на фиг.3, равна сумме частот:
ω1доп=ω1+ωсдвига.
Второй основной сигнал аналогично преобразуют во второй дополнительный сигнал, частота ω2доп которого в рассматриваемом примере определяется выражением:
ω2доп=ω2+ωсдвига.
Мгновенное значение ψ1доп(t) фазы первого дополнительного сигнала с точностью до постоянного сдвига фазы равно сумме фаз первого основного сигнала и сигнала частоты сдвига:
ψ1доп(t)=(ω1+ωсдвига)t-(ψ01+ψ0сдвига+ψ1преобр),
где ψ1преобр - дополнительный сдвиг фазы при преобразовании первого основного сигнала в первый дополнительный.
Мгновенное значение ψ2доп(t) фазы второго дополнительного сигнала с точностью до постоянного сдвига фазы равно сумме фаз второго основного сигнала и сигнала частоты сдвига:
ψ2доп(t)=(ω2+ωсдвига)t-(ψ02+ψ0сдвига+ψ2преобр),
где ψ2преобр - дополнительный сдвиг фазы при преобразовании второго основного сигнала во второй дополнительный.
Вблизи заданной точки M (см. фиг.1) располагают первый радиомаяк, излучающий первый основной и второй дополнительный сигналы, и второй радиомаяк, излучающий второй основной и первый дополнительный сигналы.
На объекте управления основные сигналы принимают и преобразуют в основной сигнал разностной частоты (ω1-ω2). Прием и преобразование могут производиться различными способами. В частности, как показано на фиг.4, прием обоих основных сигналов может производиться единым приемником основных сигналов, а преобразование принятых основных сигналов в основной сигнал разностной частоты может происходить в амплитудном детекторе.
Мгновенные значения ψ1прин(r, t) и ψ2прин(r, t) фаз принятых основных сигналов радиомаяков зависят от частот ω1 и ω2 и от расстояний r1 и r2 от соответствующих передающих антенн до объекта управления:
 ;
;
 ,
,
где r - вектор текущих координат объекта управления;
c - скорость света.
Мгновенное значение ψосн.разн(r, t) фазы основного сигнала разностной частоты с точностью до постоянного сдвига фазы равно разности фаз принятых основных сигналов:
 ,
,
где ψпреобр. осн - дополнительный сдвиг фазы при преобразовании в основной сигнал разностной частоты.
Дополнительные сигналы принимают и преобразуют в дополнительный сигнал разностной частоты.
Мгновенные значения фазы принятого первого дополнительного сигнала отличаются от мгновенных значений ψ1доп(t) фазы излученного вторым радиомаяком первого дополнительного сигнала на величину  , соответствующую расстоянию r2 от антенны второго радиомаяка до объекта управления:
, соответствующую расстоянию r2 от антенны второго радиомаяка до объекта управления:
 .
.
Мгновенные значения ψ2доп. прин(r, t) фазы принятого второго дополнительного сигнала отличаются от мгновенных значений ψ2доп(t) фазы излученного первым радиомаяком второго дополнительного сигнала на величину  , соответствующую расстоянию r1 от антенны первого радиомаяка до объекта управления:
, соответствующую расстоянию r1 от антенны первого радиомаяка до объекта управления:
 .
.
Мгновенное значение ψдоп. разн(r, t) фазы дополнительного сигнала разностной частоты с точностью до постоянного сдвига фазы равно разности ψ1доп. прин(r, t) и ψ2доп. прин(r, t) фаз принятых дополнительных сигналов:
где ψ0доп=(ψ01-ψ02)+(ψ1преобр-ψ2преобр)-ψпреобр. доп;
ψпреобр. доп - дополнительный сдвиг фазы при преобразовании в дополнительный сигнал разностной частоты.
Разность Δψ(r(t)) фаз основного и дополнительного сигналов разностной частоты в точке расположения объекта управления определяется следующим выражением:
где ψ00=(ψпреобр. осн-ψпреобр. доп)+(ψ1преобр-ψ2преобр).
Разность фаз основного и дополнительного сигналов разностной частоты в точке расположения объекта управления не зависит от начальных фаз основных сигналов и, следовательно, от соответствующих фазовых нестабильностей. Это существенно (на порядки) уменьшает требования к когерентности основных сигналов.
Покажем, что линии равных разностей фаз основного и дополнительного сигналов разностной частоты расположены веерообразно и направлены в сторону отрезка, соединяющего точки расположения антенн радиомаяков.
Определим градиент функции Δψ(r(t)), при этом учтем, что
 ;
;
 ;
;
Тогда
 ,
,
где 
Таким образом, вектор D равен разности двух векторов, имеющих одинаковую длину (ω1+ω2+ωсдвига).
Вектор градиента разности фаз перпендикулярен касательной к линии (поверхности) равных значений разности фаз. Таким образом, положение касательной к линии равных значений разности фаз в точке расположения объекта управления определяется вектором D.
Из диаграммы на фиг.1 видно, что вектор D перпендикулярен биссектрисе угла β. Поэтому касательная к линии равных фаз пересекает отрезок, соединяющий точки расположения антенн радиомаяков. Это справедливо для всех положений объекта управления и при любых положениях антенн радиомаяков.
На фиг.2 приведены линии равных разностей фаз для конкретного расположения антенн и траектория движения объекта управления. Линии равных разностей фаз пересекают отрезок, соединяющий точки расположения антенн радиомаяков. Таким образом, задача вывода объекта на заданную точку может быть сведена к задаче движения по траектории, совпадающей с одной из линий равных разностей фаз основного и дополнительного сигналов разностной частоты.
В качестве значения разностей фаз на выбранной линии равных фаз может быть использовано значение разности фаз в момент начала управления. Это значение соответствует линии L0 равных разностей фаз, проходящей через начальную точку M0.
В соответствии с этим в момент начала управления движением объекта определяют начальное значение Δψнач разности фаз основного и дополнительного сигналов разностной частоты, а в последующие моменты определяют текущие значения Δψ(r(t)) разности фаз основного и дополнительного сигналов разностной частоты.
Если после начала управления объект движется по линии L0, то отклонение текущих значений Δψ(r(t)) от начального значения Δψнач равно нулю, что должно соответствовать нулевому сигналу ошибки.
Если, как показано на фиг.2, вектор V0 скорости объекта управления в момент начала управления (или в любой другой момент) направлен не вдоль линии L0, объект отклоняется от линии L0, текущие значения разности фаз отклоняются от начального значения, что приводит к формированию сигнала ошибки, знак и величина которого определяются знаком и величиной отклонения от линии L0. В соответствии с сигналом ошибки формируется сигнал управления, в результате чего объект управления возвращается на линию L0 и движется по ней в направлении «ворот» между антеннами радиомаяков.
Определение разности фаз Δψ(r(t)) и ее отклонений от начального значения Δψнач может производиться различными способами. В частности, как показано на фиг.4, разность фаз Δψ(r(t)) может определяться в цифровом определителе разности фаз, значение разности фаз в момент начала управления Δψнач может быть записано в запоминающем устройстве по команде записи, а отклонение разности фаз может быть определено путем суммирования текущего значения разности фаз Δψ(r(t)) и взятого с обратным знаком начального значения Δψнач.
Чтобы обеспечить взаимно однозначное соответствие отклонения разности фаз и отклонения положения объекта управления от линии L0, в цифровом определителе разности фаз должен использоваться алгоритм, при котором не происходит «сброс» целого числа периодов используемой в алгоритме обратной тригонометрической функции.
В частности, алгоритм может использовать периодическое вычисление тангенса разности фаз, с последующим вычислением арктангенса. Результатом является главное значение арктангенса, которое может отличаться от истинного значения разности фаз Δψ(r(t)) на величину, кратную π:
Δψ(r(t))=Δψглавн+nπ,
где Δψглавн - главное значение арктангенса;
n - целое число.
При определении начального значения разности фаз величине n присваивается любое конечное значение. Например, нулевое.
В каждый из последующих моментов полученное очередное главное значение арктангенса сравнивается со значением в предыдущий момент. Если приращение главного значения арктангенса по абсолютной величине больше некоторого допустимого значения, то это является признаком очередного «сброса» величины π. В этом случае для компенсации «сброса» необходимо величину n изменить. Если новое главное значение меньше нуля, то величину n следует увеличить на единицу. Если новое главное значение больше нуля, то величину n следует на единицу уменьшить.
Погрешность вывода объекта на точку определяется расстоянием между радиомаяками.
Способ формирования сигналов ошибки при управлении движением объекта с целью вывода его на заданную точку, заключающийся в том, что объект управления облучают радиосигналами, а на объекте управления радиосигналы принимают и преобразуют в сигналы ошибки, отличающийся тем, что формируют первый и второй основные сигналы неравных частот и сигнал частоты сдвига, первый основной сигнал и сигнал частоты сдвига преобразуют в первом частотном преобразователе в первый дополнительный сигнал, частота которого сдвинута относительно частоты первого основного сигнала на частоту сдвига, второй основной сигнал и сигнал частоты сдвига преобразуют во втором частотном преобразователе во второй дополнительный сигнал, частота которого сдвинута относительно частоты второго основного сигнала на частоту сдвига, соответствующие сформированные сигналы направляют в первый и второй радиомаяки, расположенные вблизи заданной точки, при этом первый радиомаяк излучает первый основной и второй дополнительный сигналы, второй радиомаяк излучает второй основной и первый дополнительный сигналы, на объекте управления принимаемые основные сигналы преобразуют в основной сигнал разностной частоты, принимаемые дополнительные сигналы преобразуют в дополнительный сигнал разностной частоты, в момент начала управления движением объекта определяют начальное значение разности фаз основного и дополнительного сигналов разностной частоты, в последующие моменты определяют текущие значения разности фаз основного и дополнительного сигналов разностной частоты и формируют сигналы ошибки в зависимости от отклонений текущих значений разности фаз основного и дополнительного сигналов разностной частоты от начального значения разности фаз основного и дополнительного сигналов разностной частоты.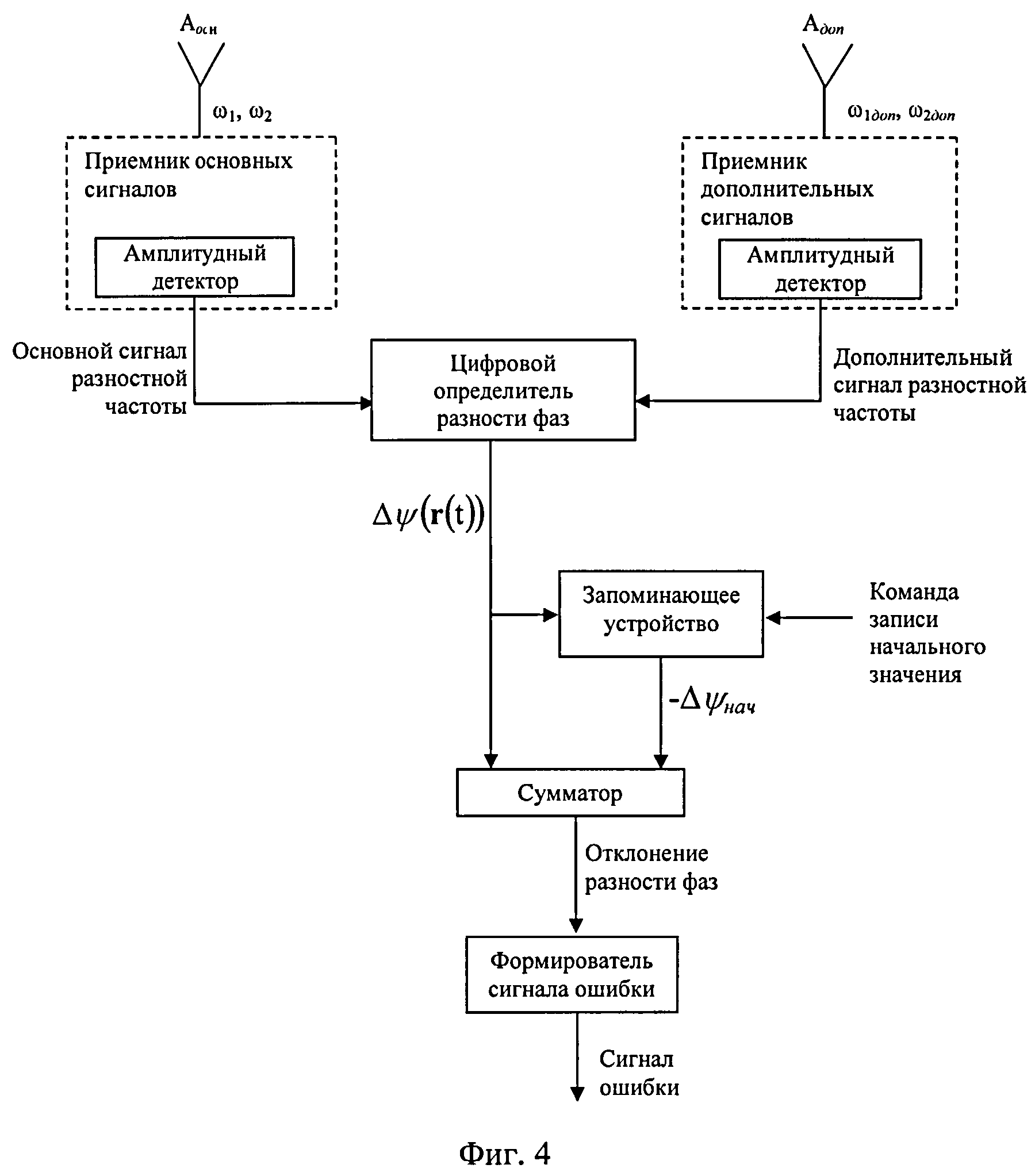
Способ синхронизации цифрового водяного знака электронного изображения
Оптическая фазированная антенная решетка
Способ формирования сигналов ошибки при управлении движением объекта с целью вывода его на заданную точку
Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке
Способ автоматизированного выявления компактных групп взаимодействующих воздушных объектов
Способ формирования канала для передачи оптического сигнала между компонентами электронного модуля
Способ измерения скорости и азимутальной координаты надводных целей радиолокаторами с синтезированной апертурой антенны
Способ терморихтовки металлических пластин и устройство для его осуществления
Способ образования канала для передачи оптического сигнала между компонентами электронного модуля
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных воздушных объектов
Способ синхронизации цифрового водяного знака электронного изображения
Оптическая фазированная антенная решетка
Способ формирования сигналов ошибки при управлении движением объекта с целью вывода его на заданную точку
Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке
Способ автоматизированного выявления компактных групп взаимодействующих воздушных объектов
Способ формирования канала для передачи оптического сигнала между компонентами электронного модуля
Способ измерения скорости и азимутальной координаты надводных целей радиолокаторами с синтезированной апертурой антенны
Способ терморихтовки металлических пластин и устройство для его осуществления
Способ образования канала для передачи оптического сигнала между компонентами электронного модуля
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных воздушных объектов

