Результат интеллектуальной деятельности: САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ
Вид РИД
Изобретение
Изобретение относится к прицельным системам и может быть использовано в прицельных устройствах самолетов-перехватчиков, ведущих атаку воздушных целей в условиях ближнего воздушного боя.
Известен самолетный прицел, содержащий бортовую радиолокационную станцию (БРЛС), включающую зеркальную антенну с датчиками угла поворота зеркала по осям азимута, наклона и крена и блоком управления антенной, выход антенны через первый вход антенного переключателя соединен со входом приемного устройства, второй вход антенного переключателя через передающее устройство подключен к выходу синхронизатора, а также цифровую вычислительную машину (ЦВМ), вход которой соединен с выходом приемного устройства. Прицел также содержит блок связи с ракетами, выход которого соединен с головками самонаведения ракет, и переключатель режимов атаки (Патент Российской Федерации №2265786 по классу F41G 3/22 с приоритетом 24.06.2004 г.).
Недостаток известного устройства при применении в нем импульсно-доплеровской БРЛС - большое время прицеливания, достигающее нескольких секунд, обусловленное отсутствием оперативного наведения зеркала антенны на цель, а также тем, что БЦВМ работает как процессор обработки отраженного сигнала, а формирование прицельной информации и управление БРЛС осуществляется с задержкой. Такое время прицеливания недопустимо при работе прицела в условиях ближнего воздушного боя.
Задача изобретения - уменьшение времени прицеливания.
Решение поставленной задачи достигается тем, что в самолетный прицел введен переключатель смещения зоны обзора и процессор управления прицеливанием, первый вход которого соединен с переключателем режимов атаки, второй вход - с переключателем смещения зоны обзора, третий вход - с датчиками угла поворота и угловой скорости зеркала антенны, четвертый вход - с информационным выходом блока связи с ракетами, пятый вход - с датчиками высоты и крена самолета, а выходы процессора управления прицеливанием соответственно подключены: первый - ко входу индикатора, второй - ко входу блока связи с ракетами, третий - ко входу блока управления антенной, а четвертый - к управляющему входу синхронизатора, при этом оба процессора соединены между собой посредством линии связи. (Гуськов Ю.Н., Бушуев С.Н., Корнев Г.И. Самолетный прицел. Патент РФ на изобретение №2379613, опубл. 20.01.2010).
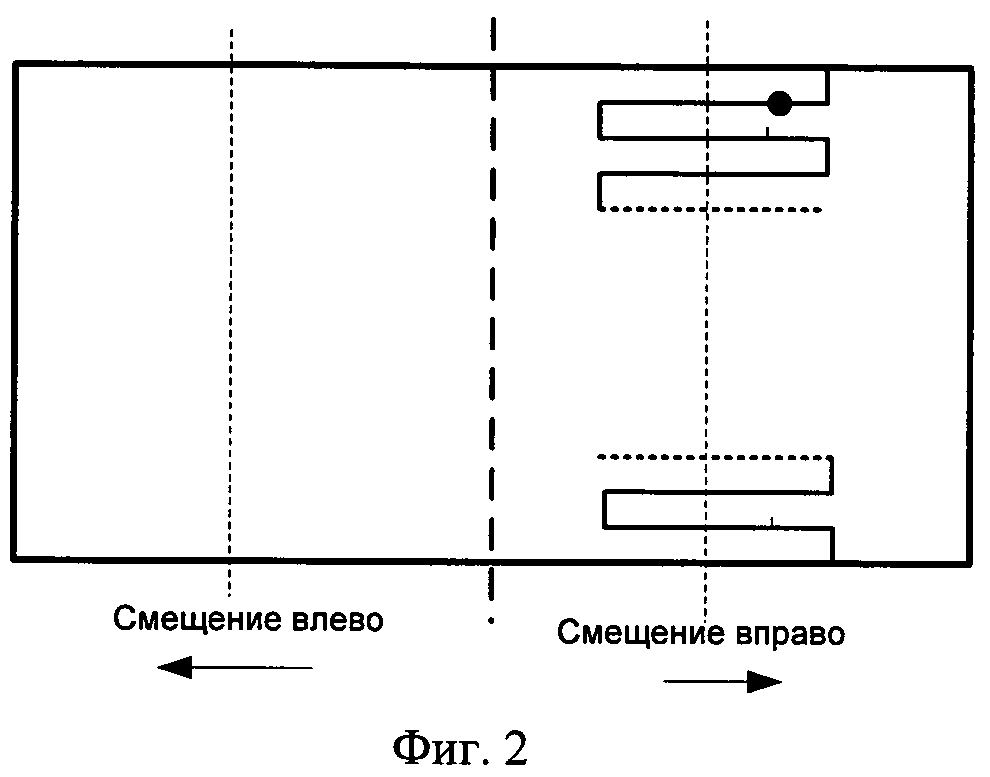
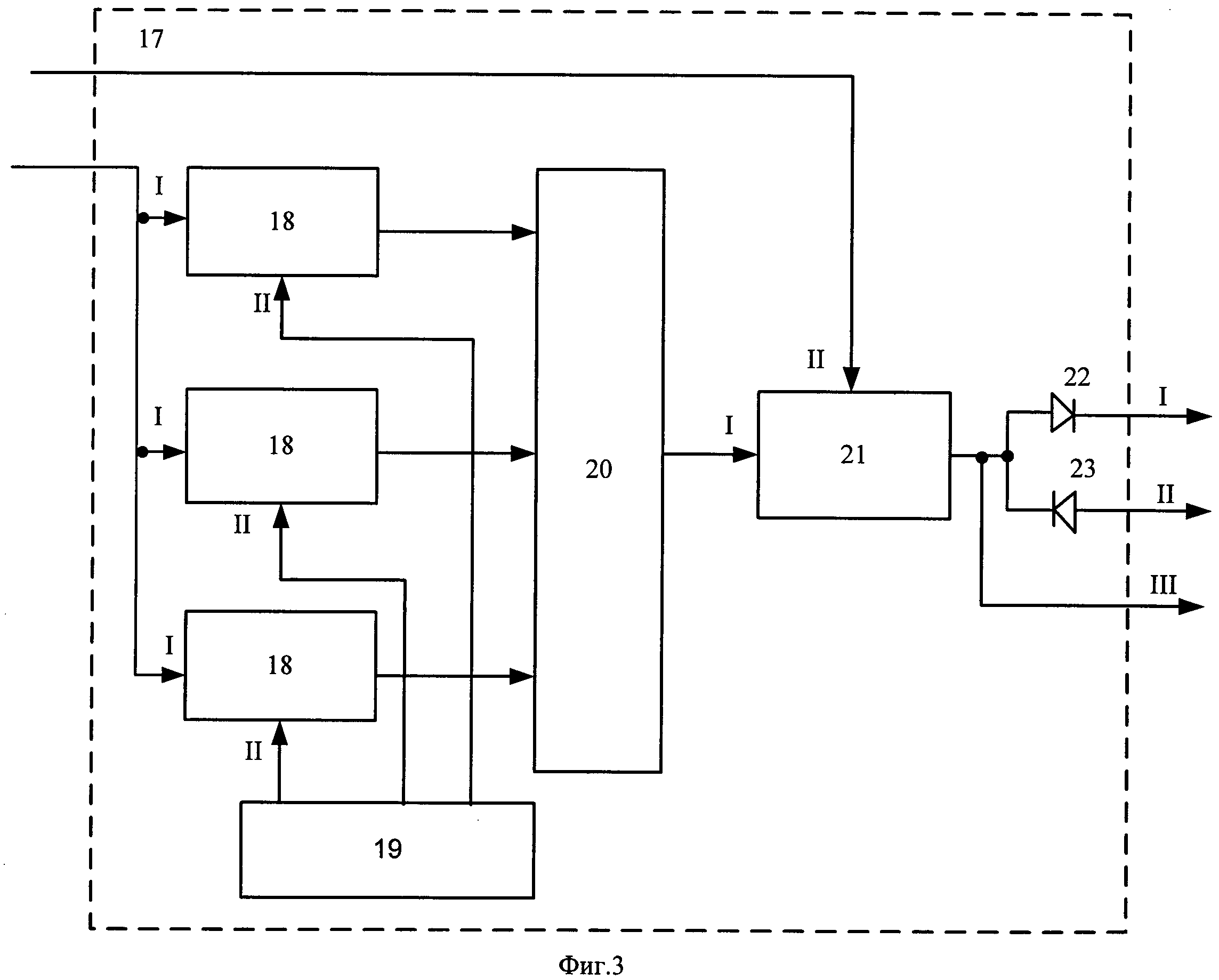
На фиг.1 представлена схема самолетного прицела, на фиг.2 - вид смещенной зоны обзора, на фиг.3 - блок 17 целеуказаний по угловому положению цели.
В состав прицела (фиг.1) входят: импульсно-доплеровская БРЛС 1, включающая антенну 2 с датчиками 3 углов поворота и угловой скорости зеркала антенны по осям азимута, наклона и крена, антенный переключатель 4, приемное и передающее устройства 5 и 6, синхронизатор 7, а также связанные линией связи процессор сигналов 8 и процессор управления прицеливанием 9, индикатор 10, переключатель режимов атаки 11 - в переднюю или в заднюю полусферу, блок связи с ракетами 12, ракеты 13, блок управления антенной 14, переключатель смещения зоны обзора 15 и датчики высоты и крена самолета 16, блок 17 целеуказаний по угловому положению цели.
Блок 17 целеуказаний по угловому положению цели (фиг.3) содержит n-пороговых устройств, задатчик сигналов, элемент ИЛИ, вычитающее устройство, первый и второй элементы ИЛИ.
Антенна 2 БРЛС 1 через первый вход антенного переключателя 4, приемник 5 и процессор сигналов 8 соединена с процессором управления прицеливанием 9 посредством линии связи. Вход индикатора 10 соединен с первым выходом процессора управления прицеливанием 9, второй выход которого подключен ко входу блока связи с ракетами 12, третий - ко входу блока управления антенной 14, а четвертый - к управляющему входу синхронизатора 7. Входы процессора 9 соответственно соединены: первый вход - с переключателем режимов атаки 11, второй вход - с переключателем смещения зоны обзора 15, третий вход - с датчиками угла поворота и угловой скорости зеркала антенны 3, четвертый вход - с информационным выходом блока связи с ракетами 12, а пятый вход - с выходами датчиков высоты и крена самолета 16. Выходы блока связи с ракетами 12 подключены ко входам ракет 13.
Первый вход блока 17 целеуказаний по угловым положениям цели связан с выходом нашлемной системы индикации летчика, второй вход с выходом датчиков углов поворота антенны, а первый, второй и третий выходы соответственно с шестым, седьмым и восьмым входами процессора управления прицеливанием.
При этом первым и вторыми входами блока целеуказаний по угловому положению цели являются соответственно первые входы n-пороговых устройств и второй вход вычитающего устройства, первый вход которого соединен с выходом элемента ИЛИ, входы которого соединены с выходами n-пороговых устройств, вторые входы которых соединены с выходами задатчиков сигналов, выход вычитающего устройства соединен с входами первого и второго датчиков, которые являются соответственно прямо включенными и обратно включенными, выход первого, второго датчиков, выход вычитающего устройства являются соответственно первым, вторым и третьим выходами блока целеуказаний по угловому положению цели.
Устройство работает следующим образом.
В процессе ведения ближнего воздушного боя, на дальностях, от 10 до 15 километров, пилот визуально через фонарь кабины обнаруживает цель, определяет ее положение относительно самолета - справа или слева, направления ее полета (сближение или удаление), устанавливает переключатель режимов атаки 11 в соответствующее положение и переключатель 15 в положение «смещение влево» или «смещение вправо». Сигнал с выхода переключателя режимов атаки 11 поступает на первый вход процессора 9, по которому он выбирает частоту повторения БРЛС 1 (высокую или среднюю) и выдает сигналы на управляющий вход синхронизатора 7, по которым он изменяет период повторения импульсов в пачке и их скважность в передающем устройстве 6, обеспечивая ведение ближнего воздушного боя.
Сигнал с выхода переключателя 15 подается на второй вход процессора 9, по которому он формирует сигналы управления шириной зоны обзора, устанавливая режим «зона малая», и ее положением в пространстве «слева» или «справа», которые поступают на входы блока управления антенной 14. В соответствии с этими сигналами антенна 2, смещаясь относительно нулевого положения (фиг.2), начинает производить построчный обзор передней полусферы малой зоной обзора, обеспечив оперативное наведение зеркала антенны на цель.
В процессе обзора сигнал с выхода передающего устройства 6 через антенный переключатель 4 поступает на вход антенны 2 и излучается в пространство. Закрытое на время импульсной посылки приемное устройство 5 открывается, и процессор 8 начинает производить обработку принимаемого сигнала, используя алгоритм быстрого преобразования Фурье.
Согласно работе В.В. Васина и др. Авиационная радиолокация. Издание ВВИА им. Н. Е. Жуковского, 1964 г., стр.529, для вычисления данных, необходимых для стрельбы самолетного комплекса перехвата, на вход вычислительного устройства (процессора управления прицеливанием) необходимо подать информацию о режиме атаки, виде оружия, дальности до цели, углах поворота и угловых скоростях зеркала антенны, а также высоте полета и угле крена самолета.
До момента обнаружения цели на втором, четвертом и пятом входах процессора 9 уже имеется информация о характере атаки (в переднюю или заднюю полусферу) с выхода переключателя режимов атаки 15, информация о наличии и типе ракет 14 с информационного выхода блока связи с ракетами 12.
При обнаружении цели процессор сигналов 8 по линии связи выдает на вход процессора управления прицеливанием 9 информацию о дальности до цели. В момент получения сигнала о наличии цели процессор 9 фиксирует значения углов поворота и угловых скоростей зеркала антенны 2 с выходов датчиков углов поворота и угловых скоростей 3, а также информацию о высоте полета и углах крена с выхода датчиков высоты и крена 16 самолета. Имея полный набор исходных данных, процессор 9 производит формирование прицельной информации, которая поступает на вход блока связи с ракетами 12 и далее на ракеты 13, подготавливая их к пуску с минимальной задержкой относительно времени формирования отметки цели.
Целеуказания по угловому положению цели в ближнем воздушном бою осуществляются следующим образом.
С выхода датчиков нашлемной системы индикации летчика сигнал, соответствующий угловому положению цели, поступает на первый вход блока 17 целеуказаний, на второй вход которого поступает сигнал с выхода датчиков 3 углов поворота антенны, соответствующий угловому положению антенны.
При этом сигналы с первого и второго входов блока 17 целеуказаний по угловому положению цели поступают соответственно на первые входы n-пороговых устройств 18 и второй вход вычитающего устройства 21.
Пороговые устройства 18 обеспечивают определение текущего значения углового положения цели за счет сравнения сигналов с нашлемной системы целеуказаний сигналов с заданными значениями.
В момент превышения текущего значения сигнала над одним из заданных, которые поступают на вторые входы n-пороговых устройств 21 с выходов задатчика 19 сигналов происходит срабатывание одного из n-пороговых устройств, с выхода которого сигнал через элемент ИЛИ 20 поступает на первый вход вычитающего устройства 21.
Вычитающее устройство 21 определяет величину рассогласования между угловым положением цели и угловым положением антенны БРЛС.
С выхода вычитающего устройства 22 сигнал поступает на восьмой вход блока 9, который выдает сигнал с четвертого выхода блока 9 на вход блока 14 управления антенной, обеспечивая при этом поворот антенны 2 БРЛС в направлении углового положения цели.
Кроме того, блок 17 целеуказаний по угловому положению цели определяет направления рассогласования между угловым положением цели и антенны БРЛС. Это происходить следующим образом.
Направления рассогласования между угловым положением цели и антенны определяются полярностью сигнала на выходе вычитающего устройства 21.
Сигнал с выхода вычитающего устройства 21 поступает на входы первого 22 и второго 23 датчиков, которые включены соответственно по схеме прямого и обратного включения.
При этом в зависимости от полярности сигнала на выходе вычитающего устройства 21, через первый 22 или второй 23 датчики сигнал поступает соответственно на шестой или седьмой входы процессора 9 управления прицеливанием.
Процессор 9 управления прицеливанием на основе данной информации обеспечивает управления по направлению угловым положением антенны БРЛС.
Введение в схему прицела блока 17 целеуказаний по угловым положениям цели в сочетании с описанными выше связями позволяет осуществить оперативное наведение зеркала антенны на цель, уменьшив тем самым время прицеливания, что особенно актуально при ведении ближнего воздушного боя.
Прицельная система для ближнего воздушного боя, содержащая бортовую радиолокационную станцию, процессор обработки сигналов, индикатор и блок связи с ракетами, переключатель режимов атаки и датчики высоты полета и крена самолета, переключатель смещения зоны обзора, процессор управления прицеливанием, бортовая радиолокационная станция состоит из зеркальной антенны с блоком управления антенной, снабженной датчиками углов поворота и угловых скоростей зеркала по осям азимута, наклона и крена, выход которой через первый вход антенного переключателя соединен с входом приемного устройства, второй вход антенного переключателя через передающее устройство подключен к выходу синхронизатора, вход которого соединен с выходом приемного устройства, выходы блока связи соединены с ракетами, первый вход процессора управления прицеливанием соединен с переключателем режимов атаки, второй вход - с переключателем смещения зоны обзора, третий вход - с датчиками углов поворота и угловых скоростей зеркала антенны, четвертый вход - с информационным выходом блока связи с ракетами, пятый вход - с датчиками высоты и крена самолета, выходы процессора управления прицеливанием соответственно подключены: первый - ко входу индикатора, второй - ко входу блока связи с ракетами, третий - ко входу блока управления антенной, а четвертый - к управляющему входу синхронизатора, при этом процессоры связаны между собой линией связи, отличающаяся тем, что дополнительно введен блок целеуказаний по угловому положению цели, первый вход которого связан с выходом нашлемной системы индикации летчика, второй вход - с выходом датчиков углов поворота антенны, а первый, второй и третий выходы - соответственно с шестым, седьмым и восьмым входами процессора управления прицеливанием, блок целеуказаний по угловому положению цели содержит n-пороговых устройств, задатчик сигналов, элемент ИЛИ, вычитающее устройство, первый и второй диоды, при этом первым и вторыми входами блока целеуказаний по угловому положению цели являются соответственно первые входы n-пороговых устройств и второй вход вычитающего устройства, первый вход которого соединен с выходом элемента ИЛИ, входы которого соединены с выходами n-пороговых устройств, вторые входы которых соединены с выходами задатчиков сигналов, выход вычитающего устройства соединен с входами первого и второго диодов, которые являются соответственно прямо включенными и обратно включенными, выход первого, второго диодов, выход вычитающего устройства являются соответственно первым, вторым и третьим выходами блока целеуказаний по угловому положению цели.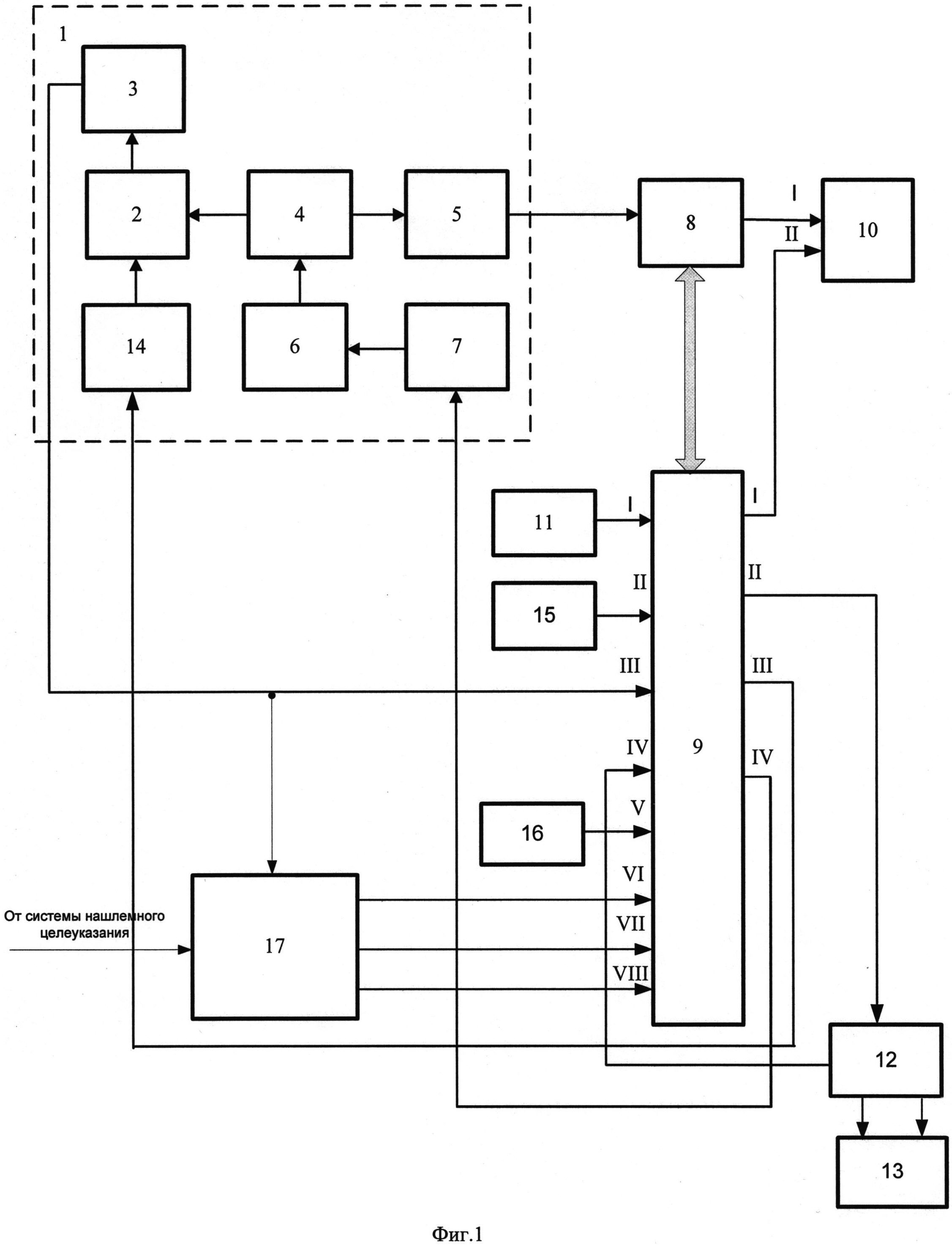
Способ распознавания цели и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ определения характеристик осколочного поля снаряда и устройство для его осуществления
Способ распознавания цели и устройство для его осуществления
Способ управления характеристиками поля поражения осколочно-фугасной боевой части ракеты и устройство для его осуществления
Способ испытания боеприпасов на аэроудар и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ распознавания групповой цели и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ определения характеристик осколочного поля снаряда и устройство для его осуществления
Способ распознавания цели и устройство для его осуществления
Способ испытания боеприпасов на аэроудар и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ распознавания групповой цели и устройство для его осуществления
Автомобильная бортовая информационная система
Способ определения эффективности фугасного воздействия равных по массе сосредоточенного и дробного рассредоточенного зарядов взрывчатого вещества

