Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СНАРЯДОМ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области разработки систем управления беспилотными летательными аппаратами и может быть использовано в комплексах управляемого ракетного и артиллерийского вооружения, в которых осуществляется наведение по сигналам спутниковых навигационных систем.
Известен способ формирования управляющих сигналов (В.И. Бабичев, В.В. Ветров, А.В. Игнатов, А.Р. Орлов «Основы устройства и функционирования артиллерийских управляемых снарядов», Тула, издательство ТулГУ, 2003 г., с.41, 108-120), включающий определение угловой скорости линии «снаряд-цель» (линии визирования цели) и формирование сигналов управления рулевым приводом, пропорциональных измеренной угловой скорости.
Для реализации данного способа, называемого методом пропорциональной навигации, требуется, чтобы на борту снаряда находилась следящая за целью гироскопическая головка самонаведения (ГСН), определяющая угловую скорость линии визирования цели и формирующая сигналы, пропорциональные угловой скорости линии визирования цели:
где UY, UZ - сигналы управления рулевым приводом (РП) в вертикальной и горизонтальной плоскостях;
k - коэффициент пропорциональности;

 - угловая скорость линии визирования цели в вертикальной и горизонтальной плоскостях;
- угловая скорость линии визирования цели в вертикальной и горизонтальной плоскостях;
θлв, φлв - углы наклона и поворота линии визирования цели.
Фотоприемное устройство (ФПУ) ГСН при этом измеряет рассогласование между линией визирования цели и осью ФПУ:
Δφу=θлв-ϑг; ΔφZ=φлв-ψг,
где ϑг, ψг - углы наклона и поворота гирокоординатора ГСН.
Датчик момента преобразует сигналы Δφy, Δφz в моменты коррекции My,z, разворачивающие гирокоординатор на цель:
где k1 - коэффициент пропорциональности;
T1 - постоянная времени ФПУ;
T2 - постоянная времени датчика момента.
Передаточная функция гирокоординатора в упрощенной форме имеет вид:
где H - кинетический момент ротора гирокоординатора.
Формируемые моменты коррекции и сигналы управления РП при достаточно малых T1 и T2 пропорциональны угловой скорости линии визирования цели:
где T - постоянная времени контура слежения за целью, определяемая добротностью ГСН.
Недостатком такого формирования сигналов управления является ограничение пороговой чувствительности ГСН и вследствие этого ограничение дальности начала самонаведения. Увеличение максимальной дальности стрельбы при обеспечении требуемой точности попадания снаряда в цель возможно при увеличении дальности начала самонаведения в связи с необходимостью выбора снарядом увеличивающегося с увеличением дальности стрельбы рассеивания снаряда.
Спутниковые навигационные системы (СНС), обеспечивающие определение координат и скорости снаряда, позволяют осуществлять наведение снаряда на цель до начала наведения снаряда на цель по сигналам ГСН, что позволяет увеличить максимальную дальность стрельбы. Одной из проблем, связанных с использованием СНС, является зашумленность сигналов координат и скорости (в меньшей степени) снаряда.
Задачей предлагаемого изобретения является разработка способа формирования сигналов управления снарядом по сигналам СНС. Измерение СНС координат и скорости снаряда позволяет осуществлять наведение по методу пропорциональной навигации или по методу погони, когда сигналы управления формируются таким образом, чтобы вектор скорости снаряда был направлен на цель. Однако при наведении по методу погони контур наведения снаряда более чувствителен к расфазировке в сигналах управления, возникающей вследствие изменения требуемого угла фазирования системы при изменении частоты вращения снаряда по крену относительно его расчетного значения, определяемого при расчетном значении частоты вращения по крену. Поэтому наведение снаряда на цель по сигналам СНС осуществляется по методу пропорциональной навигации. Для обеспечения требуемой точности попадания снаряда в цель необходимо также уменьшить зашумленность измеренных СНС сигналов координат снаряда.
Решение задачи достигается тем, что в способе формирования сигналов управления снарядом, включающем определение угловой скорости линии визирования цели и формирование сигналов управления, пропорциональных угловой скорости линии визирования цели, угловую скорость линии визирования цели в вертикальной  и горизонтальной
и горизонтальной  плоскостях определяют по сигналам проекций скорости снаряда Vx, Vy, Vz и сигналам сглаженных координат снаряда Хф, Yф, Zф, полученным посредством суммирования сигналов, пропорциональных интегралам измеренных проекций скорости снаряда, с сигналами, пропорциональными сглаженным разностям сигналов измеренных координат снаряда и интегралов измеренных проекций скорости снаряда, в соответствии с зависимостями:
плоскостях определяют по сигналам проекций скорости снаряда Vx, Vy, Vz и сигналам сглаженных координат снаряда Хф, Yф, Zф, полученным посредством суммирования сигналов, пропорциональных интегралам измеренных проекций скорости снаряда, с сигналами, пропорциональными сглаженным разностям сигналов измеренных координат снаряда и интегралов измеренных проекций скорости снаряда, в соответствии с зависимостями:


где 
 - угловые скорости линии визирования цели в вертикальной и горизонтальной плоскостях;
- угловые скорости линии визирования цели в вертикальной и горизонтальной плоскостях;
Хф, Yф, Zф - сглаженные координаты снаряда;
Vx, Vy, Vz - проекции скорости снаряда, измеренные СНС;
Хц, Yц, Zц - координаты цели, введенные в аппаратуру снаряда перед стартом снаряда.
Предлагаемый способ формирования управляющих сигналов осуществляется следующим образом. Перед пуском снаряда определяют координаты цели Хц, Yц, Zц и время начала наведения по сигналам СНС, отсчитываемое от момента старта. После пуска снаряда по истечении заданного промежутка времени измеряют координаты X, Y, Z и проекции скорости снаряда Vx, Vy, Vz, последние интегрируют, разности координат X, Y, Z и интегралов от соответствующих проекций скорости фильтруют, сигналы, полученные в результате фильтрации, суммируют с интегралами от соответствующих проекций скорости. По полученным сигналам Хф, Yф, Zф, проекциям скорости снаряда Vx, Vy, Vz и координатам цели Хц, Yц, Zц определяют угловые скорости разворота линии визирования цели в соответствии с зависимостями (1), (2). Затем формируют сигналы управления рулями, пропорциональные измеренным проекциям угловой скорости.
Зависимости (1) и (2) позволяют вычислить угловые скорости наклона и разворота линии визирования цели. Углы наклона и разворота линии визирования цели определяются в соответствии с зависимостями:


где Y, Z - координаты снаряда.
Продифференцировав (3), (4), получим:

Угловую скорость наклона линии визирования целесообразно определять по упрощенной зависимости:

так как величина  вплоть до срыва наведения (за секунду до подлета к цели) не превышает 0.27°/с, что соответствует точности определения угловой скорости линии визирования цели ГСН, и обеспечивает требуемую точность попадания.
вплоть до срыва наведения (за секунду до подлета к цели) не превышает 0.27°/с, что соответствует точности определения угловой скорости линии визирования цели ГСН, и обеспечивает требуемую точность попадания.
Угловую скорость линии визирования цели необходимо определять в соответствии с зависимостями (1), (2), так как при численном дифференцировании выражений (3), (4) возникают дополнительные помеховые составляющие.
Сглаживание (фильтрация) координат, измеренных СНС, в соответствии с предлагаемым способом повышает точность измерения координат снаряда. Фильтрация в данном случае основана на различном уровне шумов, содержащихся в измеренных координатах и проекциях скорости: шумы проекций скорости достаточно малы, а шумы измеренных координат требуют фильтрации. Если проинтегрировать измеренные проекции скорости, то получим оценочные значения координат, содержащие меньший шум, чем непосредственно измеренные значения координат. Но чтобы измерять координаты интегрированием проекций скорости, необходимо иметь начальные условия, которые могут быть получены непосредственным измерением координат, следовательно, на начальные условия повлияет шум, присутствующий в измеренных координатах. Кроме того, возможно накопление ошибки интегрирования. Поэтому в предлагаемом способе интегралы от проекций скорости суммируют с сигналами, полученными в результате фильтрации разностей непосредственно измеренных координат и интегралов от проекций скорости. Апериодический фильтр служит для уменьшения амплитуды шума, содержащегося в непосредственно измеренной координате, но при этом в измеренную координату вносится запаздывание. Чтобы исключить несоответствие по времени, фильтрации подвергают не координату, а ее разность с координатой, полученной интегрированием проекции скорости. Величина на выходе фильтра служит поправкой на ошибку интегрирования. Поскольку требуемая поправка, в отличие от самих координат снаряда, изменяется медленно, запаздывание, вносимое в нее фильтром, является допустимым.
Предлагаемый фильтр координат аналогичен фильтру Калмана для измеренной координаты при наличии точно измеренной скорости. Уравнения фильтра Калмана, например, для координаты X в этом случае примут вид:



где Δt - интервал приема сигнала СНС;
Vx h-1 - измеренное на h-1 шаге значение проекции скорости снаряда;
 - координата на выходе фильтра;
- координата на выходе фильтра;
Хизм h - измеренное значение координаты.
Подставляя (5) в (6), получим:

Дискретное преобразование предлагаемого фильтра для координаты X определяется уравнением:

Зависимость (9) аналогична зависимости (8) при переменной величине T, определяемой в соответствии с зависимостью:
 .
.
В предлагаемом способе постоянная времени T изменяется дискретно.
Предлагаемый способ управления снарядом поясняют графические материалы, приведенные на фигурах 1-5.
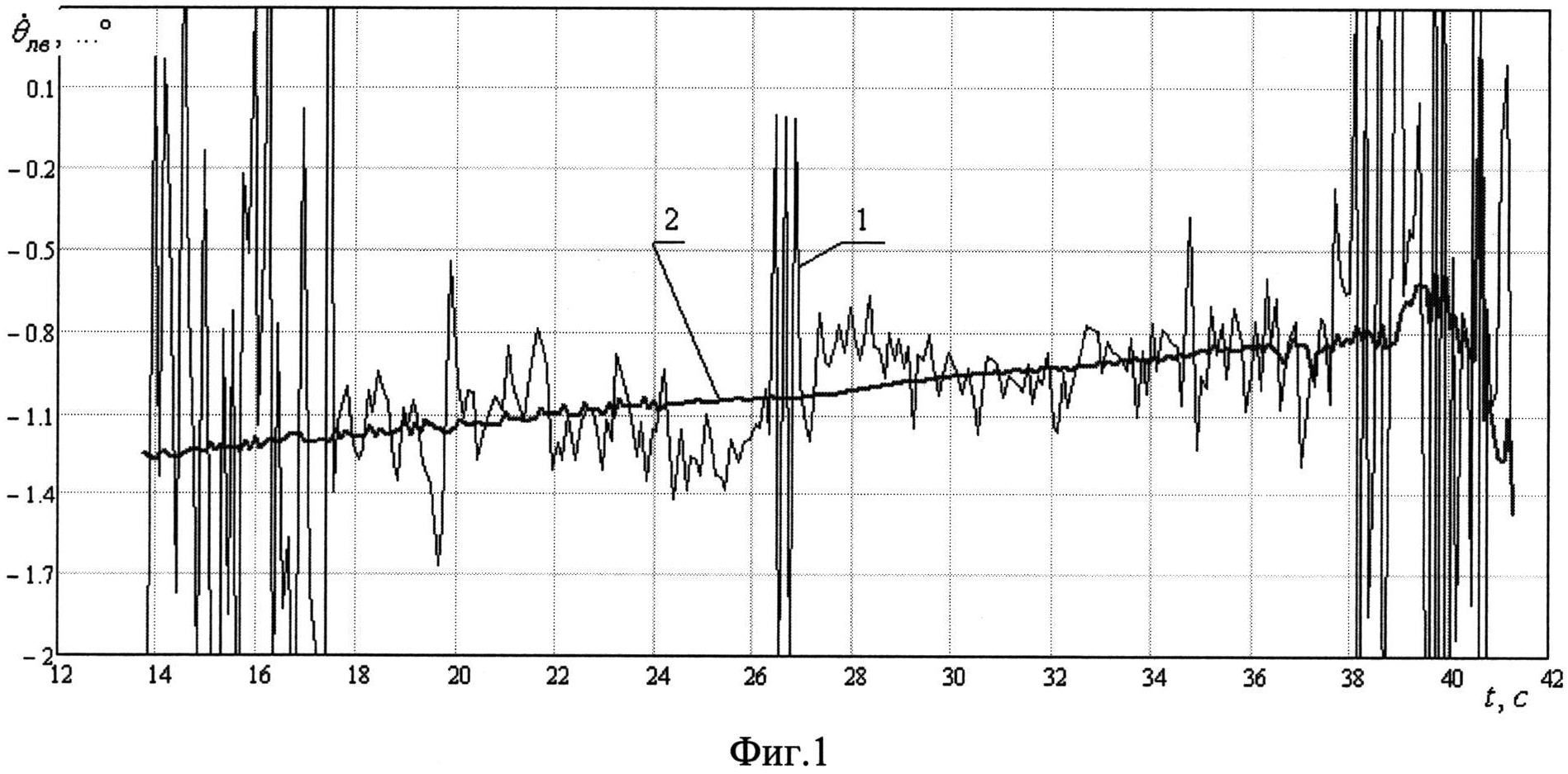
На фиг.1 приведена угловая скорость наклона линии визирования цели при определении ее в соответствии с зависимостью (1) - процесс 2 и при дифференцировании в соответствии с зависимостью (3) - процесс 1. Из фиг.1 видно, что угловая скорость, определяемая в соответствии с зависимостью (1), менее зашумлена.
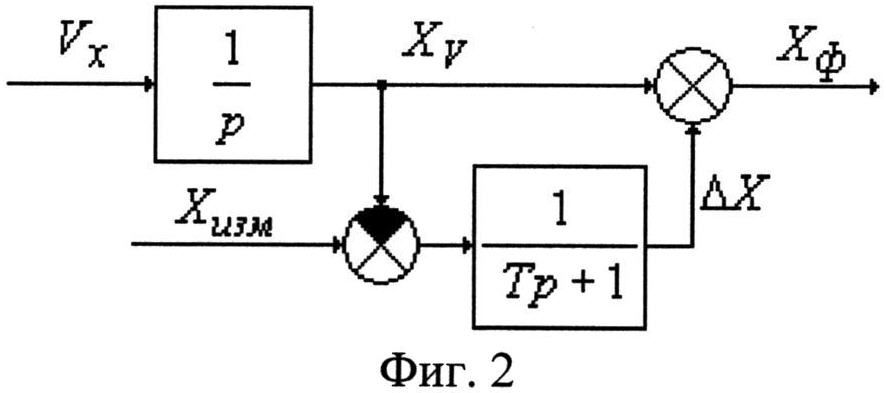
На фиг.2 приведена структурная схема предлагаемого фильтра координат. На фиг.2 обозначено:
Хф - координата X на выходе фильтра координат;
ХV - координата, определенная интегрированием измеренной скорости;
ΔX - разность измеренных координат на выходе фильтра;
T - постоянная времени фильтра.
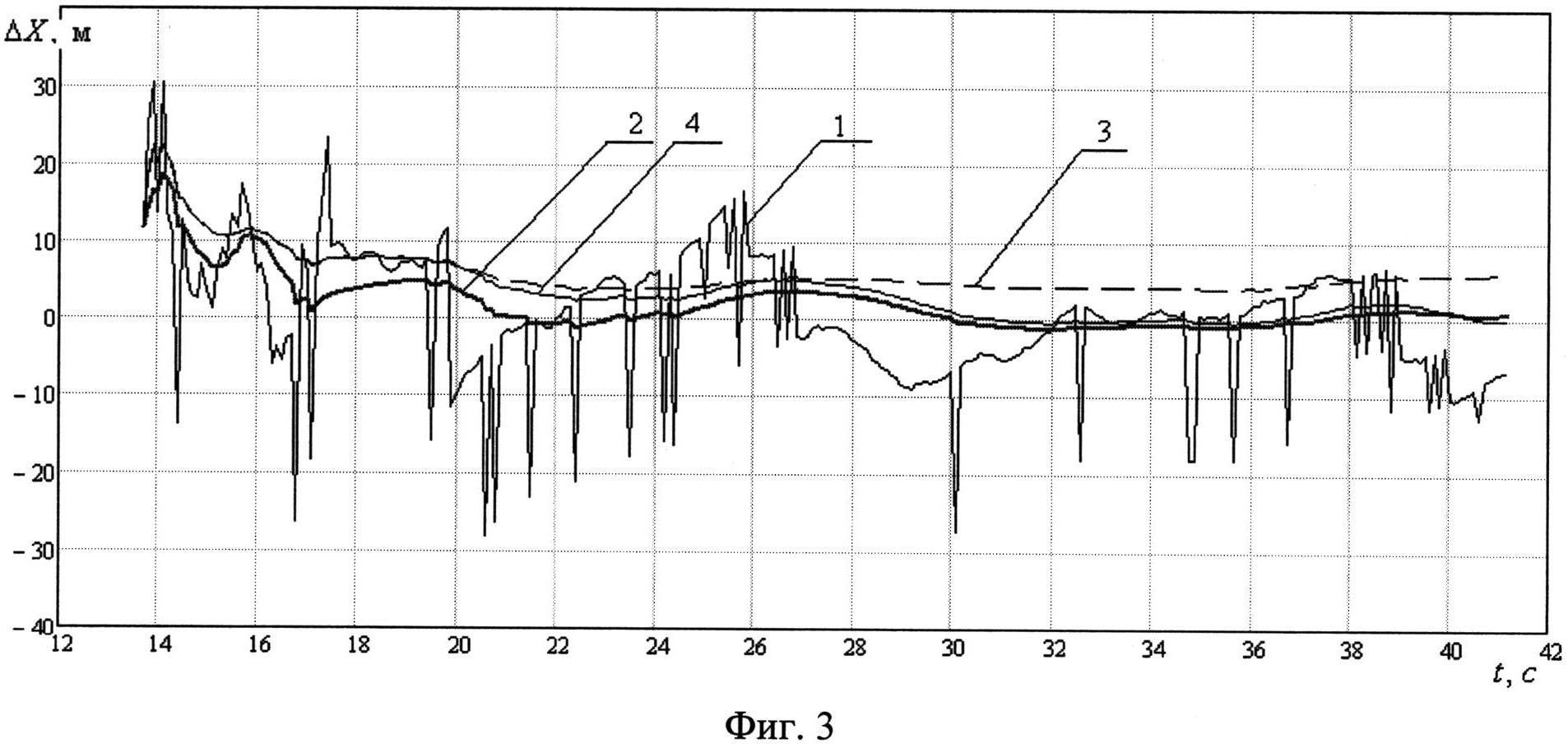
На фиг.3, 4 приведены ошибки ΔX и ΔY определения координат X и Y без фильтрации (процесс 1), при фильтрации предлагаемым фильтром (процесс 2) с постоянной времени T, равной:
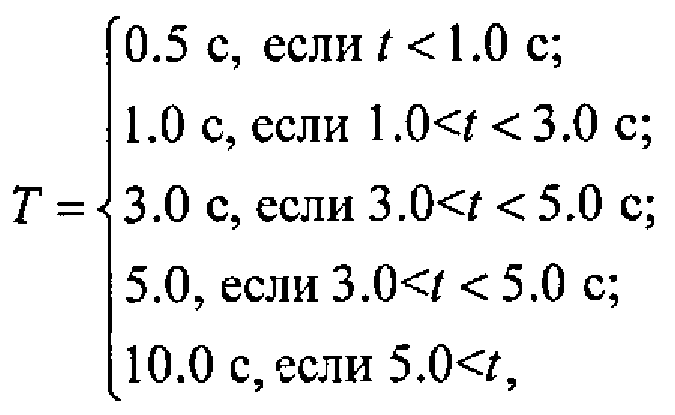
а также при фильтрации фильтром Калмана без ограничения Bh (процесс 3) и при ограничении Bh при h>49 (процесс 4). Из фиг.3, 4 видно, что если коэффициент Bh фильтра Калмана не уменьшать ниже 0.05 (h>49), то при предлагаемом изменении постоянной времени предлагаемого фильтра установившиеся процессы фильтрации предлагаемым фильтром и фильтром Калмана с ограничением совпадают. Фильтр Калмана, у которого коэффициент В всегда без ограничения определяется формулой (7), подавляет шум эффективно, но постепенно уходит от истинного значения.
На фиг.5 приведены ошибки определения угловой скорости наклона линии визирования цели при отсутствии фильтрации (процесс 1), при фильтрации предлагаемым фильтром (процесс 2), при фильтрации фильтром Калмана без ограничения Bh (процесс 3) и с ограничением Bh (процесс 4). Из фиг.5 видно, что применение предлагаемого фильтра обеспечивает наилучшую фильтрацию, фильтр Калмана с ограничением наиболее близок к предлагаемому фильтру. Таким образом, предлагаемая фильтрация обеспечивает требуемую точность определения угловой скорости линии визирования цели при достаточной простоте реализации.
Способ формирования сигналов управления снарядом, включающий определение угловой скорости линии визирования цели, формирование сигналов управления рулями, пропорциональных угловой скорости линии визирования цели, отличающийся тем, что угловую скорость линии визирования цели в вертикальной и горизонтальной плоскостях определяют по сигналам проекций скорости снаряда V, V, V и сигналам сглаженных координат снаряда Х, Y, Z, полученным посредством суммирования сигналов, пропорциональных интегралам измеренных проекций скорости снаряда с сигналами, пропорциональными сглаженным разностям сигналов измеренных координат снаряда и интегралов измеренных проекций скорости снаряда, в соответствии с зависимостями: где , - угловые скорости линии визирования цели в вертикальной и горизонтальной плоскостях;X, Y, Z - сглаженные координаты снаряда;V, V, V - проекции скорости снаряда;Х, Y, Z - координаты цели.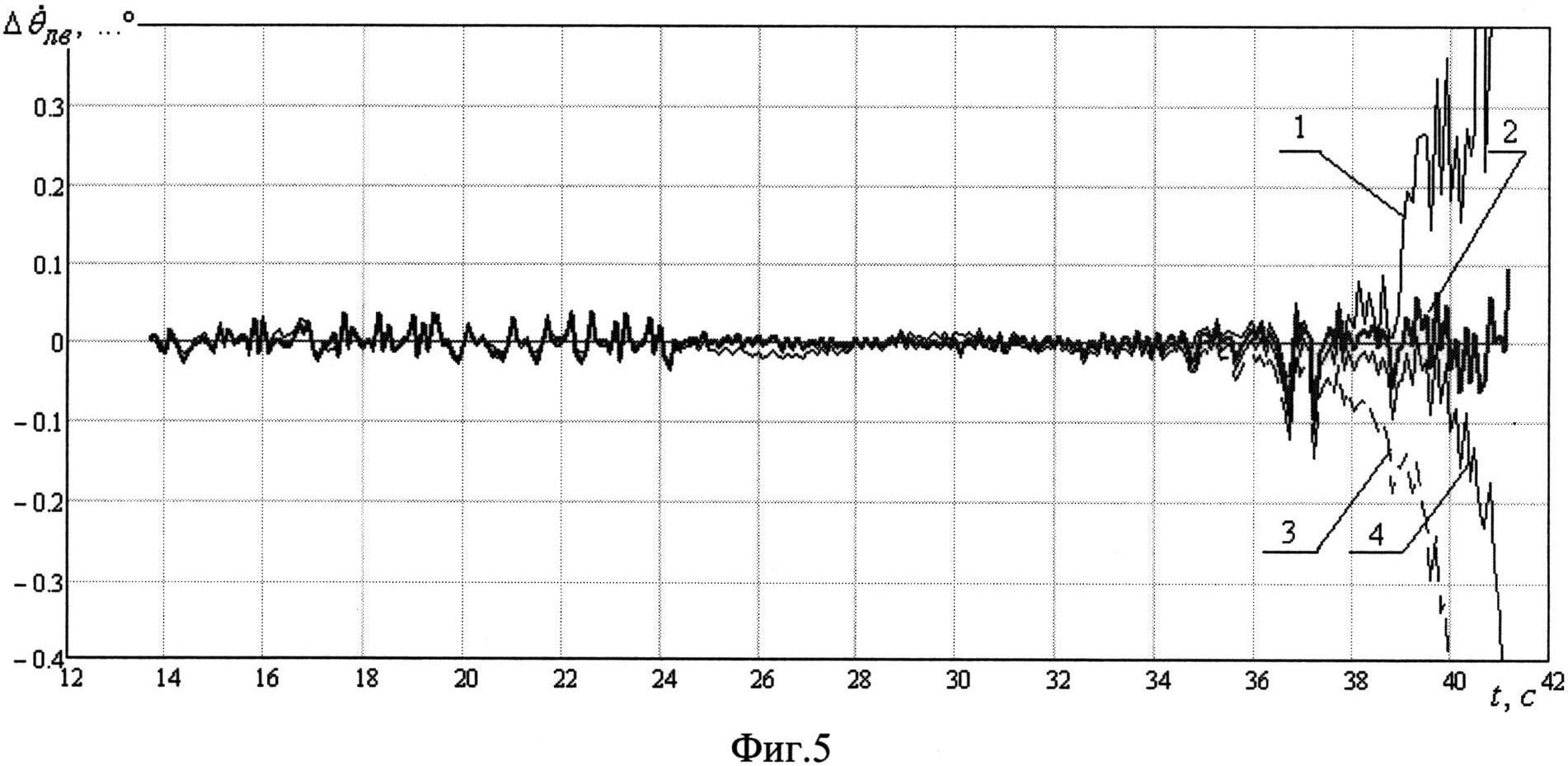





Способ определения угла крена бесплатформенной инерциальной навигационной системы вращающегося по крену артиллерийского снаряда
Космическая энергетическая установка с машинным преобразованием энергии
Вакуумный стенд для огневых испытаний жидкостного ракетного двигателя космического назначения
Способ наведения управляемого снаряда, телеориентируемого в луче лазера (варианты)
Способ вывода ракеты в зону захвата цели головкой самонаведения и устройство для его осуществления
Способ стрельбы управляемым снарядом с лазерной полуактивной головкой самонаведения (варианты)
Способ стрельбы управляемым артиллерийским снарядом с лазерной полуактивной головкой самонаведения
Способ наведения телеуправляемой ракеты
Способ стрельбы управляемым снарядом
Система наведения управляемого снаряда
Устройство формирования команд управления вращающейся вокруг продольной оси ракетой
Способ наведения вращающейся ракеты с релейным приводом рулевого органа (варианты)
Способ формирования сигналов управления ракетой
Способ наведения по оптическому лучу ракеты, стартующей с подвижного носителя, и система наведения для его осуществления
Энергетическая установка с машинным преобразованием энергии

