Результат интеллектуальной деятельности: СПОСОБ ПОИСКА НЕИСПРАВНОСТЕЙ В НЕПРЕРЫВНОЙ ДИНАМИЧЕСКОЙ СИСТЕМЕ НА ОСНОВЕ ВВЕДЕНИЯ ПРОБНЫХ ОТКЛОНЕНИЙ
Вид РИД
Изобретение
Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ поиска неисправностей динамического блока в непрерывной системе (Способ поиска неисправностей динамического блока в непрерывной системе: патент РФ 2429518: МПК7 G05B 23/02 (2006.01) / Шалобанов С.С. - №2010128421/08; заявл. 08.07.2010; опубл. 20.09.2011, Бюл. №26).
Недостатком этого способа является то, что он позволяет находить только неисправности в виде отклонений параметров передаточной функции системы.
Наиболее близким техническим решением (прототипом) является способ поиска неисправного блока в динамической системе (Способ поиска неисправного блока в динамической системе: патент РФ 2435189: МПК7 G05B 23/02 (2006.01) / Шалобанов С.В., Шалобанов С.С. - №2009123999/08; заявл. 23.06.2009; опубл. 27.11.2011, Бюл. №33).
Недостатком этого способа является то, что он позволяет находить только неисправности в виде изменения передаточных функций отдельных блоков (подсистем) всей системы.
Технической задачей, на решение которой направлено данное изобретение, является расширение функциональных возможностей способа, связанных с поиском топологических дефектов, то есть дефектов, приводящих к обрыву или появлению новых межблочных связей.
Поставленная задача достигается тем, что регистрируют реакцию заведомо исправной системы fjном(t), j=1, …, k на интервале t∈[0, TK] в k контрольных точках и определяют интегральные оценки выходных сигналов Fjном (α), j=1, …, k системы, для чего в момент подачи входного сигнала на вход системы с номинальными характеристиками одновременно начинают интегрирование сигналов системы управления в каждой из k контрольных точек с весами ℮-αt, где  путем подачи на первые входы k блоков перемножения сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальный сигнал ℮-αt, выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени ТК, полученные в результате интегрирования оценки выходных сигналов Fjном(α), j=1, …, k регистрируют, определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек, полученные в результате введения пробных отклонений топологических состояний каждой из m возможных связей (удаляется существующая межблочная связь или вводится новая межблочная связь), для чего поочередно для каждой возможной топологической связи динамических блоков системы вводят пробное отклонение состояния топологической связи и находят интегральные оценки выходных сигналов системы для параметра α и входного сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждого из m пробных отклонений Pji(α), j=1, …, k; i=1, …, m регистрируют, определяют деформации интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний соответствующих топологических связей блоков динамической системы ΔPji(α)=Pji(α)-Fjном(α), j=1, …, k; i=1, …, m, определяют нормированные значения деформаций интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний соответствующих топологических связей из соотношения
путем подачи на первые входы k блоков перемножения сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальный сигнал ℮-αt, выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени ТК, полученные в результате интегрирования оценки выходных сигналов Fjном(α), j=1, …, k регистрируют, определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек, полученные в результате введения пробных отклонений топологических состояний каждой из m возможных связей (удаляется существующая межблочная связь или вводится новая межблочная связь), для чего поочередно для каждой возможной топологической связи динамических блоков системы вводят пробное отклонение состояния топологической связи и находят интегральные оценки выходных сигналов системы для параметра α и входного сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждого из m пробных отклонений Pji(α), j=1, …, k; i=1, …, m регистрируют, определяют деформации интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний соответствующих топологических связей блоков динамической системы ΔPji(α)=Pji(α)-Fjном(α), j=1, …, k; i=1, …, m, определяют нормированные значения деформаций интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний соответствующих топологических связей из соотношения  , замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный входной сигнал x(t), определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек Fj(α), j=1, …, k для параметра α, определяют отклонения интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений ΔFj(α)=Fj(α)-Fjном(α), j=1, …, k, определяют нормированные значения отклонений интегральных оценок выходных сигналов контролируемой системы из соотношения
, замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный входной сигнал x(t), определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек Fj(α), j=1, …, k для параметра α, определяют отклонения интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений ΔFj(α)=Fj(α)-Fjном(α), j=1, …, k, определяют нормированные значения отклонений интегральных оценок выходных сигналов контролируемой системы из соотношения  , определяют диагностические признаки из соотношения
, определяют диагностические признаки из соотношения  i=1, …, m, по минимуму диагностического признака определяют топологический дефект.
i=1, …, m, по минимуму диагностического признака определяют топологический дефект.
Таким образом, предлагаемый способ поиска неисправной топологической связи блоков сводится к выполнению следующих операций:
1. В качестве динамической системы рассматривают систему, состоящую из произвольно соединенных динамических блоков, с количеством рассматриваемых изменений топологических связей блоков m.
2. Предварительно определяют время контроля Тк≥Тпп, где
Тпп - время переходного процесса системы. Время переходного процесса оценивают для номинальных значений параметров динамической системы.
3. Определяют параметр интегрального преобразования сигналов из соотношения
.
4. Фиксируют число контрольных точек k.
5. Предварительно определяют нормированные векторы  деформаций интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний топологических связей блоков каждой из m топологических связей блоков для номинальных состояний топологических связей блоков и определенного выше параметра α, для чего выполняют пункты 6-10.
деформаций интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний топологических связей блоков каждой из m топологических связей блоков для номинальных состояний топологических связей блоков и определенного выше параметра α, для чего выполняют пункты 6-10.
6. Подают входной сигнал x(t) (единичный ступенчатый, линейно возрастающий, прямоугольный импульсный и т.д.) на вход системы управления с номинальными характеристиками. Принципиальных ограничений на вид входного тестового воздействия предлагаемый способ не предусматривает.
7. Регистрируют реакцию системы fjном(t), j=1, …, k на интервале t∈[0, TK] в k контрольных точках и определяют интегральные оценки выходных сигналов Fjном (α), j=1, …, k системы. Для этого в момент подачи тестового сигнала на вход системы управления с номинальными характеристиками одновременно начинают интегрирование сигналов системы управления в каждой из k контрольных точек с весами ℮-αt, где
, для чего сигналы системы управления подают на первые входы k блоков перемножения, на вторые входы блоков перемножения подают экспоненциальный сигнал ℮-αt, выходные сигналы k блоков перемножения подают на входы к блоков интегрирования, интегрирование завершают в момент времени ТК, полученные в результате интегрирования оценки выходных сигналов Fjном(α), j=1, …, k регистрируют.
8. Определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек, полученные в результате каждого из m пробных отклонений состояний топологических связей, для чего поочередно изменяют состояние каждой топологической связи блоков динамической системы (например с состояния «есть связь» в состояние «нет связи» или наоборот) и выполняют пункты 6 и 7 для одного и того же входного сигнала x(t). Полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждого из m пробных отклонений Pji(α), j=1, …, k и регистрируют.
9. Определяют деформации интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний топологических связей блоков динамической системы ΔPji(α)=Pji(α)-Fjном(α), j=1, …, k; i=1, …, m.
10. Определяют нормированные значения деформаций интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний соответствующих топологических связей блоков, по формуле  .
.
11. Замещают систему с номинальными характеристиками контролируемой. На вход системы подают аналогичный тестовый сигнал x(t).
12. Определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек Fj(α), j=1, …, k, осуществляя операции, описанные в пунктах 6 и 7 применительно к контролируемой системе.
13. Определяют отклонения интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений ΔFj(α)=Fj(α)-Fjном(α), j=1, …, k.
14. Вычисляют нормированные значения отклонений интегральных оценок выходных сигналов контролируемой системы по формуле  .
.
15. Вычисляют диагностические признаки наличия неисправного блока по формуле  , i=1, …, m.
, i=1, …, m.
16. По минимуму значения диагностического признака определяют топологический дефект.
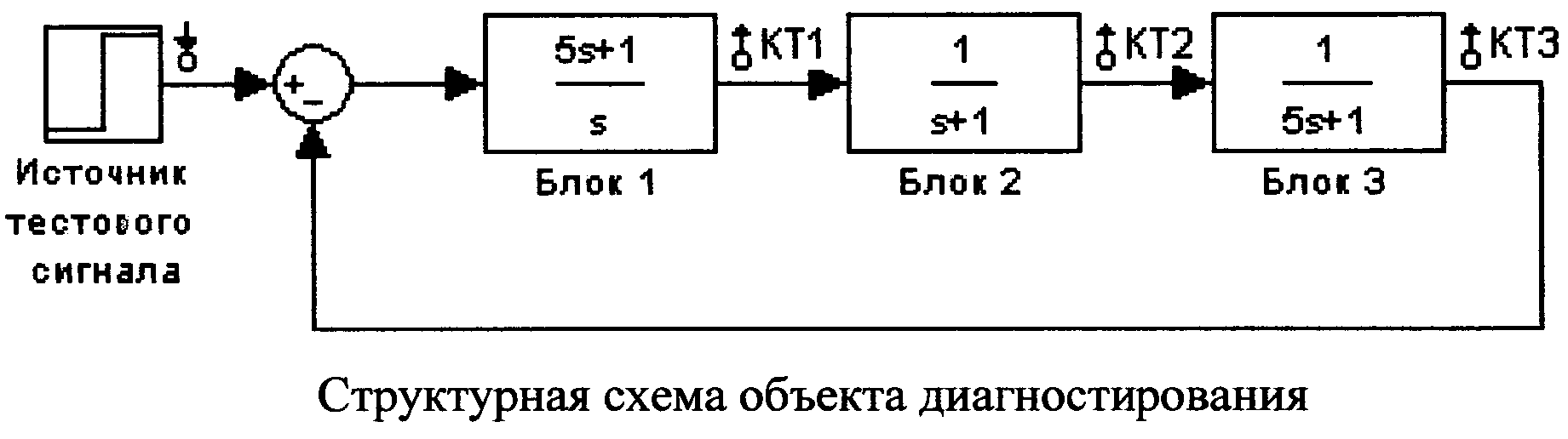
Рассмотрим реализацию предлагаемого способа поиска топологического дефекта для системы, структурная схема которой представлена на рисунке (см. фиг. Структурная схема объекта диагностирования).
Передаточные функции блоков:
 ;
;  ;
;  ,
,
номинальные значения параметров: Т1=5 с; k1=1; k2=1; Т2=1 с; k3=1; Т3=5 с. При поиске топологического дефекта в виде обрыва связи между первым и вторым звеньями (дефект №1) путем подачи ступенчатого тестового входного сигнала единичной амплитуды и интегрального преобразования сигналов для параметра α=0.5 и Тk=10 с получены значения диагностических признаков на основе пробных отклонений состояний топологической связи при использовании трех контрольных точек, расположенных на выходах блоков: J1=0; J2=0.7499 (обрыв связи между вторым и третьим блоком); J3=0.7847 (обрыв связи между третьим и первым блоком). Минимальное значение признака J1 однозначно указывает на наличие топологической связи между первым и вторым блоками.
Моделирование процессов поиска топологических дефектов связей между вторым и третьем, а также третьим и первым блоками для данного объекта диагностирования при том же параметре интегрирования α и при единичном ступенчатом входном сигнале дает следующие значения диагностических признаков:
При наличии дефекта в виде обрыва топологической связи между вторым и третьим блоками: J1=0.7499; J2=0; J3=0.0704.
При наличии дефекта в виде обрыва топологической связи между третьим и первым блоками: J1=0.7847; J2=0.0704; J3=0.
Минимальное значение диагностического признака во всех случаях правильно указывает на наличие топологического дефекта.
Способ поиска неисправностей в непрерывной динамической системе на основе введения пробных отклонений, основанный на том, что фиксируют число возможных неисправностей m, определяют время контроля Т≥Т, где Т - время переходного процесса системы, определяют параметр интегрального преобразования сигналов из соотношения , используют тестовый сигнал на интервале t∈[0,T], в качестве динамических характеристик системы используют интегральные оценки сигналов, полученные для вещественных значений параметра интегрального преобразования α, фиксируют число k контрольных точек системы, регистрируют реакцию объекта диагностирования f(t), j=1,…, k и реакцию заведомо исправной системы f(t), j=1,…, k на интервале t∈[0,T] в k контрольных точках, определяют интегральные оценки выходных сигналов f(α), j=1,…, k исправной системы, для чего в момент подачи тестового сигнала на вход системы с номинальными характеристиками одновременно начинают интегрирование сигналов системы управления в каждой из k контрольных точек с весами , где путем подачи на первые входы k блоков перемножения сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальный сигнал , выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Т, полученные в результате интегрирования оценки выходных сигналов F(α), j=1,…, k регистрируют, замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный тестовый сигнал x(t), определяют интегральные оценки сигналов контролируемой системы для k контрольных точек F(α), j=1,…, k для параметра α, определяют отклонения интегральных оценок сигналов контролируемой системы для k контрольных точек от номинальных значений ΔF(α)=F(α)-F(α), j=1,… , k, определяют нормированные значения отклонений интегральных оценок сигналов контролируемой системы из соотношения , отличающийся тем, что определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек, полученные в результате каждого из m пробных отклонений состояний топологических связей, для чего поочередно изменяют состояние каждой топологической связи блоков динамической системы и находят интегральные оценки выходных сигналов системы для параметра α и входного сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждого из m пробных отклонений состояния топологической связи P(α), j=1,…, k; i=1,…, m регистрируют, определяют деформации интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний соответствующих топологических связей динамических блоков системы ΔP(α)=P(α)-F(α), j=1,…, k; i=1,…, m, определяют нормированные значения деформаций интегральных оценок выходных сигналов модели, полученные в результате пробных отклонений состояний соответствующих топологических связей блоков из соотношения , определяют диагностические признаки из соотношения , по минимуму диагностического признака определяют топологический дефект.



Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Смеситель
Гидроцилиндр
Способ формирования короткой комбинированной забойки взрывных скважин с каменным материалом и устройство для его осуществления
Способ формирования короткой комбинированной забойки взрывных скважин и устройство для его осуществления
Водоочиститель для получения талой питьевой воды
Смеситель
Прибор для измерения угловых параметров пил
Гвоздь
Устройство для изготовления подшипника скольжения намоткой
Способ ремонта гидравлических двигателей
Защитная композиция для деревянных строительных конструкций
Способ ремонта гидравлических двигателей
Способ переработки медного гальваношлама
Антикоррозионное защитное полимерное покрытие
Самоходный перегрузочный бункер
Способ автоматической фокусировки камеры
Устройство для тушения лесных пожаров
Способ заготовки древесины на крутых склонах с использованием валочно-пакетирующей машины и аэростатно-канатной системы

