Результат интеллектуальной деятельности: СПОСОБ АДАПТИВНОГО ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области систем оптико-электронного наблюдения вертолетного базирования.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является способ наблюдения огневых средств (ОС) (см., например, Авиационное вооружение и авионика. Энциклопедия XXI века. Оружие и технологии России. - М.: Оружие и технологии. Том X, 1999. стр.360-405), основанный на оптико-электронном наблюдении подстилающей поверхности с борта вертолета.
Недостатком способа является ограниченная дальность оптико-электронного наблюдения бортовым средством оптико-электронного наблюдения на маршруте полета вертолета, определяемая преимущественно дальностью прямой видимости и разрешающей способностью средства оптико-электронного наблюдения. Ограниченная дальность оптико-электронного наблюдения может привести к уменьшению времени реакции экипажа или бортового комплекса обороны вертолета на принятие мер противодействия ОС.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является увеличение дальности наблюдения подстилающей поверхности и обнаружения различных объектов, расположенных на маршруте полета вертолета.
Технический результат достигается тем, что в известном способе адаптивного оптико-электронного наблюдения, основанном на наблюдении подстилающей поверхности бортовым средством оптико-электронного наблюдения (СОЭН) вертолета, осуществляют доставку на заданное удаление в направлении полета вертолета дополнительное СОЭН, установленное на дистанционно-пилотируемом летательном аппарате (ДПЛА), производят наблюдение удаленного участка подстилающей поверхности дополнительным СОЭН и передают полученное изображение на борт вертолета, где анализируют полученное изображение и при необходимости изменяют параметры наблюдения подстилающей поверхности дополнительным СОЭН, определяют координаты ДПЛА и передают их значения на борт вертолета, определяют координаты местоположения вертолета, по полученным значениям координат вертолета и ДПЛА оценивают параметры рассогласования их взаимного местоположения, в случае несоответствия параметров рассогласования взаимного местоположения вертолета и ДПЛА заданным, автоматически корректируют их значения изменением местоположения ДПЛА.
Сущность изобретения заключается в адаптивном управлении траекторией полета предварительно забрасываемого носителя дополнительного СОЭН относительно траектории полета вертолета. Управление полетом носителя дополнительного СОЭН осуществляется с вертолета. При этом обеспечивается автоматическая привязка траектории полета носителя дополнительного СОЭН к текущей траектории полета вертолета. Изображение, получаемое дополнительным СОЭН, передается на борт вертолета.
На фигуре 1 представлена схема, поясняющая способ, где: 1 - вертолет с бортовым СОЭН; 2 - носитель дополнительного СОЭН; 3 - сектор просмотра бортового СОЭН вертолета; 4 - сектор просмотра дополнительного СОЭН; 5 - огневое средство; 6 - рубеж (точка) изменения направления полета вертолета; 7, 8 - направления полета вертолета и носителя дополнительного СОЭН. Вертолет, двигаясь в направлении 7, бортовым СОЭН 1 осуществляет наблюдение подстилающей поверхности, в секторе 3, ограниченном техническими характеристиками СОЭН, ландшафтом и метеоусловиями. При необходимости увеличения дальности наблюдения подстилающей поверхности (принятие такого решения может быть обусловлено дополнительной информацией о возможном нахождении ОС на маршруте полета, по изменению ландшафта подстилающей поверхности и т.д.) экипаж вертолета осуществляет запуск носителя дополнительного СОЭН 2 в предполагаемую точку наблюдения. В результате экипаж вертолета получает возможность осуществлять наблюдение подстилающей поверхности на удаленном участке маршрута полета по изображению сектора 4, полученному СОЭН 3, и наблюдение подстилающей поверхности с помощью бортового СОЭН 1. В случае необходимости экипаж изменяет сектор просмотра 4 подстилающей поверхности (параметры ведения съемки СОЭН 2) дополнительного СОЭН 2. При этом носитель дополнительного СОЭН 2 имеет увеличенные скоростные характеристики по маневру и полету по отношению к вертолету 1. После доставки в предполагаемую точку наблюдения полет носителя дополнительного СОЭН 2 осуществляется по траектории, «адаптивной» к траектории полета вертолета 1. Т.е. параметры изменения направления 7 полета вертолета 1 автоматически передаются на носитель дополнительного СОЭН 2, который корректирует свое направление 8 полета в соответствии с траекторией полета вертолета. Для этого осуществляется определение координат местоположения носителя 2, их передача на борт вертолета 1, обработка координат в интересах оценки взаимного расположения носителя 2 и вертолета 1, выработка и передача сигналов управления полетом на носитель 2. Так, в случае обнаружения ОС 5 (фигура 1) по изображению, полученному дополнительным СОЭН 2 и переданному на борт вертолета 1, экипаж на рубеже 6 корректирует направление 7 полета с целью безопасного обхода ОС 5. Одновременно соответствующие сигналы передаются на носитель дополнительного СОЭН 2, который также осуществляет корректировку направления 8 полета, адаптивную к направлению 7 полета вертолета 1. Таким образом, у заявляемого способа появляется возможность расширить область наблюдения подстилающей поверхности, а использование автоматического адаптивного управления траекторией полета носителя дополнительного СОЭН высвобождает экипажу время и ресурс для решения других задач, в том числе по противодействию угрозе поражения ОС 5.
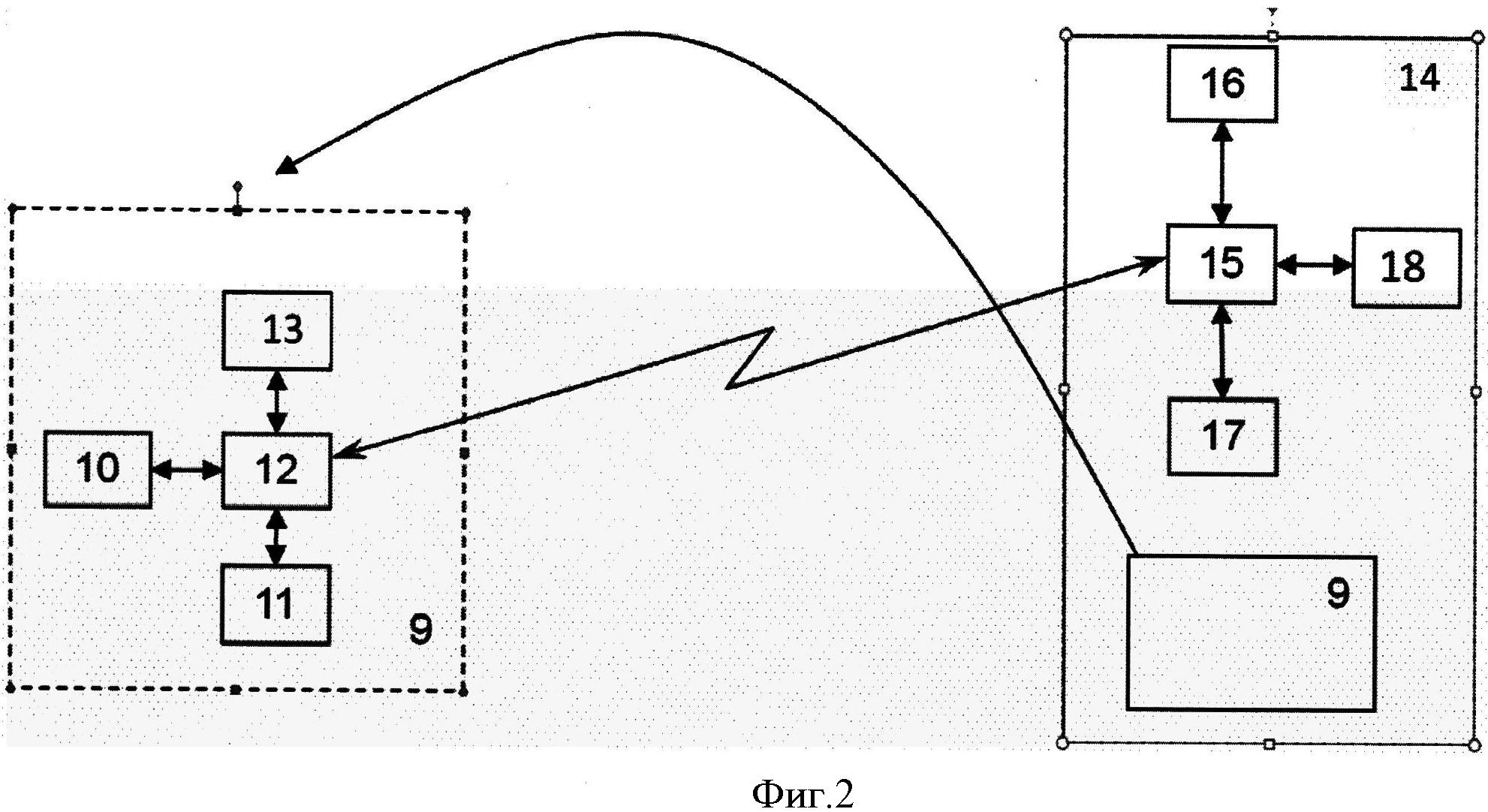
На фигуре 2 представлена блок-схема устройства, с помощью которого может быть реализован предлагаемый способ. Блок-схема устройства содержит: установленный на подвесном пусковом устройстве вертолета ДПЛА 9, на борту которого установлены СОЭН 10, радионавигационный приемник 11, блок приема/передачи данных 12, сопряженный радиоканалом с блоком передачи/приема данных вертолета, блок траекторного управления ДПЛА 13; на борту вертолета 14: блок приема/передачи данных 15, бортовое СОЭН 16 вертолета, сопряженное с СОЭН 10, радионавигационный приемник 17, бортовой блок управления траекторией полета ДПЛА 18. Все бортовые средства и блоки связаны линиями передачи данных между собой.
Устройство работает следующим образом. Бортовое СОЭН 16 вертолета 14 осуществляет наблюдение подстилающей поверхности. В случае расширения области наблюдения экипаж осуществляет запуск ДПЛА 9, на борту которого установлено дополнительное СОЭН 10. СОЭН 10 на определенном удалении от вертолета осуществляет наблюдение подстилающей поверхности и передает изображение с помощью сопряженных по радиоканалу блоков приема/передачи данных 12, 15 в бортовое СОЭН 16. Радионавигационный приемник 11 определяет координаты местоположения ДПЛА 9, значения которых с помощью сопряженных по радиоканалу блоков приема/передачи данных 12, 15 передает в бортовой блок управления траекторией полета ДПЛА 18. Радионавигационный приемник 17 определяет координаты местоположения вертолета 14, значения которых также передает в бортовой блок управления траекторией полета ДПЛА 18. Бортовой блок управления траекторией полета ДПЛА 18 по поступившим данным производит оценку взаимного расположения ДПЛА 9 и вертолета 14, формирует сигналы управления и с помощью сопряженных по радиоканалу блоков приема/передачи данных 12, 15 передает в блок траекторного управления ДПЛА 13. Блок траекторного управления ДПЛА 13 изменяет траекторию полета ДПЛА 13. В результате экипаж вертолета осуществляет наблюдение в требуемом направлении подстилающей поверхности на удаленном участке маршрута полета по изображению, полученному СОЭН 10, и наблюдение за подстилающей поверхностью с помощью бортового СОЭН 16.
Таким образом, предлагаемый способ позволяет за счет использования высокоскоростного ДПЛА и дополнительного СОЭН увеличить дальность наблюдения подстилающей поверхности на маршруте полета вертолета, а использование автоматического адаптивного управления траекторией полета носителя дополнительного СОЭН относительно траектории полета вертолета - сохранить динамические характеристики полета вертолета и эксплуатационный ресурс экипажа для решения других задач. Тем самым предлагаемый авторами способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ адаптивного оптико-электронного наблюдения, основанный на наблюдении подстилающей поверхности бортовым СОЭН вертолета, осуществлении доставки на заданное удаление в направлении полета вертолета дополнительного СОЭН, установленного на ДПЛА, произведении наблюдения удаленного участка подстилающей поверхности дополнительным СОЭН и передачи полученного изображения на борт вертолета, анализе на борту вертолета полученного изображения и изменении при необходимости параметров наблюдения подстилающей поверхности дополнительным СОЭН, определении координат местоположения ДПЛА и передачи их значений на борт вертолета, определении координат местоположения вертолета, оценке по полученным значениям координат вертолета и ДПЛА параметров рассогласования их взаимного местоположения, автоматической корректировке их значения изменением местоположения ДПЛА в случае несоответствия параметров рассогласования взаимного местоположения вертолета и ДПЛА заданным.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптико-электронные, радиоэлектронные узлы и устройства, а также современные высокоскоростные (в том числе реактивные) ДПЛА.
Способ адаптивного оптико-электронного наблюдения, основанный в наблюдении подстилающей поверхности бортовым средством оптико-электронного наблюдения вертолета, отличающийся тем, что осуществляют доставку на заданное удаление в направлении полета вертолета дополнительного средства оптико-электронного наблюдения, установленного на дистанционно-пилотируемом летательном аппарате, производят наблюдение удаленного участка подстилающей поверхности дополнительным средством оптико-электронного наблюдения и передают полученное изображение на борт вертолета, где анализируют полученное изображение и при необходимости изменяют параметры наблюдения подстилающей поверхности дополнительным средством оптико-электронного наблюдения, определяют координаты местоположения дистанционно-пилотируемого летательного аппарата и передают их значения на борт вертолета, определяют координаты местоположения вертолета, по полученным значениям координат вертолета и дистанционно-пилотируемого летательного аппарата оценивают параметры рассогласования их взаимного местоположения, в случае несоответствия параметров рассогласования взаимного местоположения вертолета и дистанционно-пилотируемого летательного аппарата заданным, автоматически корректируют их значения изменением местоположения дистанционно-пилотируемого летательного аппарата.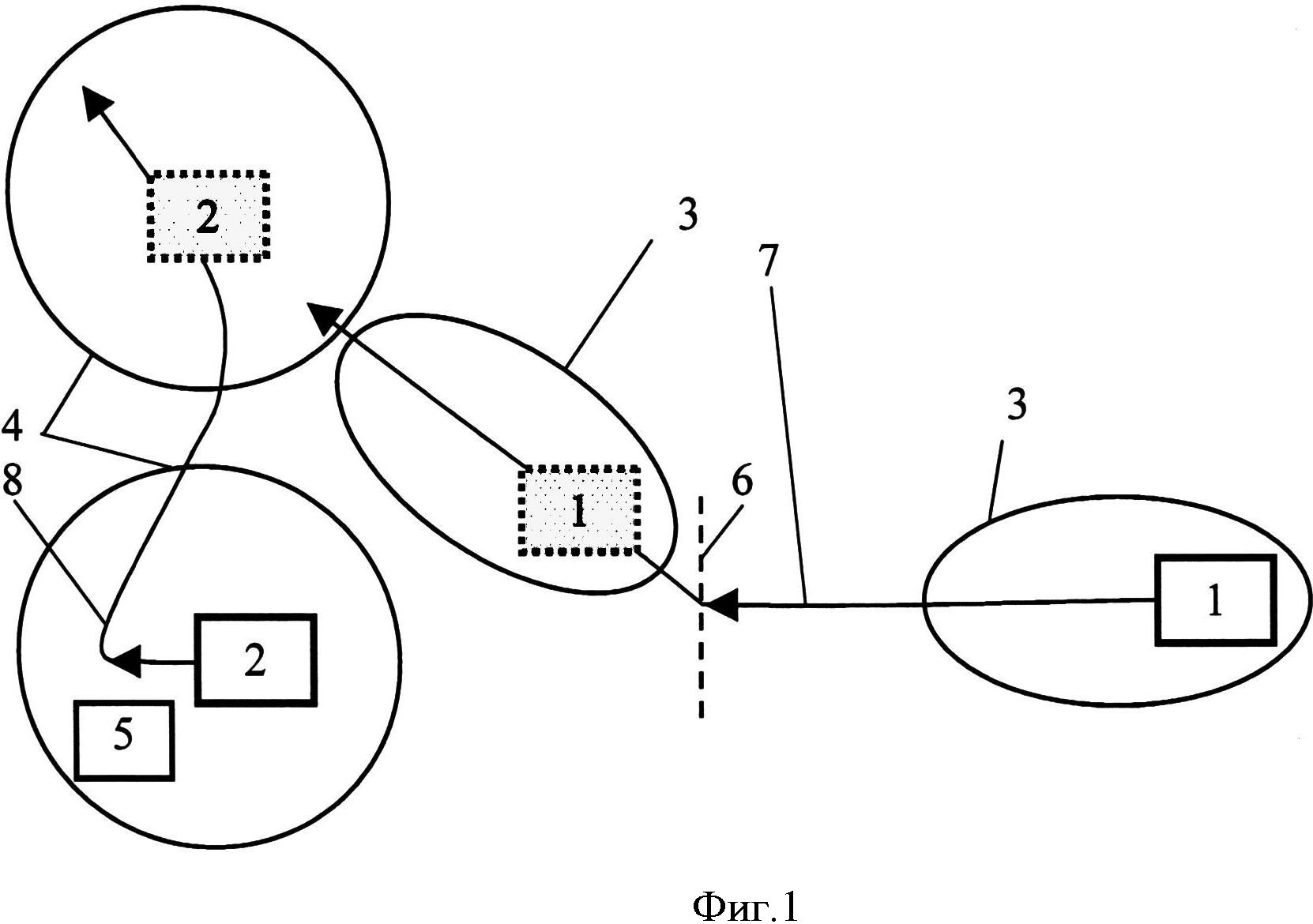
Способ определения угловых координат на источник направленного оптического излучения
Малогабаритный буксировщик воздушных судов с дистанционным управлением
Устройство для сжигания топлива в газотурбинном двигателе
Аппаратно-программный комплекс для макетирования и отладки цифровых устройств на базе микроконтроллеров различных архитектур
Способ измерения радиуса пространственной когерентности локационных оптических сигналов
Способ повышения помехозащищенности управляемого боеприпаса
Способ защиты оэс от мощного лазерного излучения
Способ имитации оптико-электронного средства
Устройство имитации вибрирующих объектов
Способ распределенного усиления мощности оптических сигналов для систем сравнения и синхронизации шкал времени и оптоволоконных рефлектометров
Система одно- и двухсторонних сравнений шкал времени с эхо-генератором
Способ поражения цели управляемым боеприпасом в сложной фоноцелевой обстановке
Способ наведения управляемого боеприпаса и устройство для его осуществления
Способ маскировки объектов

