Результат интеллектуальной деятельности: СПОСОБ БЕССЕНСОРНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РОТОРА В БЕСКОНТАКТНЫХ ПОДШИПНИКАХ
Вид РИД
Изобретение
Изобретение относится к области энергомашиностроения, в частности к электромеханическим преобразователям энергии на бесконтактных подшипниках.
Известен механизм с магнитным подвесом ротора (а.с. СССР №1569932, H02K 7/09, 1990 г.), в котором каждый канал системы содержит датчик положения ротора, пропорционально-интегрально-дифферснциальный регулятор, силовой преобразователь и два электромагнита.
Недостатком данной конструкции является сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Известна конструкция системы управления магнитным подшипником (патент РФ №2181922 C2, H02P 6/16, H02K 7/09, H02K 29/06, 2002.04.27), каждый канал управления которой содержит датчик положения ротора, силовой преобразователь, два электромагнита, причем обмотки электромагнитов подключены к силовому преобразователю, каждый канал которого снабжен интегральным регулятором и форсирующим регулятором второго порядка, причем выход интегрального регулятора соединен с прямым входом форсирующего регулятора второго порядка, выход которого соединен со входом силового преобразователя, а выход датчика положения ротора соединен с инверсными входами обоих регуляторов.
Недостатком данной конструкции является сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора.
Известна конструкция магнитного подшипника (патент РФ №2246644 C1, F16C 32/04, 2005.02.20), в которой модуль управления содержит формирователь вектора радиального перемещения ротора, соединенный выходом через блок динамической обработки сигнала радиального отклонения со входом формирователя управляющих токов в обмотках управления радиальной опоры, который выходами подключен ко входам соответствующих усилителей мощности канала стабилизации радиального положения ротора, выходы которых являются первыми управляющими выходами модуля управления, блок контроля процесса управления, выполненный с возможностью передачи управляющей информации в систему автоматического управления машины, выпрямитель напряжения выходами соединен через емкостный фильтр с входами регулятора напряжения и источника вторичного электропитания, выполненного с возможностью подключения к выводам электропитания всех блоков модуля управления, причем один из выходов емкостного фильтра и выход регулятора напряжения являются третьими управляющими выходами модуля управления, при этом входы формирователя вектора радиального перемещения ротора являются первыми информационными входами модуля управления, а формирователь управляющих токов в обмотках управления радиальной опоры выполнен с возможностью реализации векторной стабилизации ротора по осям в радиальных направлениях.
Недостатком данной конструкции также является сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Известен способ управления неустойчивостью в гидродинамических подшипниках (патент РФ №2399803, F16C 17/02, 08.06.2005), по которому управления неустойчивостью гидродинамических подшипников, включающих гидродинамические подшипники, используемые в узлах высокоскоростных роторов или валов, включающий использование магнитного подшипника в комбинации с гидродинамическим подшипником, причем гидродинамический подшипник используют в качестве подшипника, воспринимающего основную нагрузку, а магнитный подшипник используют в качестве средства управления неустойчивостью в гидродинамическом подшипнике.
Недостатком такого способа является сложность его технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Известен способ управления ротором в активных магнитных подшипниках (Журавлев Ю.Н. «Активные магнитные подшипники: Теория, расчет, применение» - СПб.: Политехника, 2003. - 206 с.: ил., стр.98), по которому измеряют электрическую величину - ток в обмотки электромагнита активного магнитного подшипника, электрически соединенного с регулятором и силовым преобразователем и по величине тока судят о положении ротора и управляют им.
Недостатком данного способа является невозможность контроля положения ротора при всех типах бесконтактных подшипников, и сложность технической реализации, связанная со значительным количеством информационных каналов, а также невозможность применения данного способа во всех типах гибридных магнитных подшипников (например, в комбинации газовых или гидростатических с магнитными подшипниками на постоянных магнитах).
Наиболее близким к заявляемому по технической сущности и достигаемому результату относится способ бессенсорного управления активными магнитными подшипниками (патент US 5696412 A, H02K 7/09, 20.10.1993), по которому управляющие электромагниты, электрически соединенные с регулятором и силовым преобразователем, помещают коаксиально в упорядоченном массиве, окружающем ротор, и измеряют электрическую величину на их зажимах, в качестве которой выступает падение напряжения, путем сравнения абсолютной величины падения напряжения двух противоположных электромагнитов судят о величине смещения, исходя из которой рассчитывается величина управляющего тока.
Недостатком данного способа является сложность его технической реализации, связанная со значительным количеством информационных каналов и электромагнитов, а также ограниченные функциональные возможности, обусловленные невозможностью применения данного способа во всех типах гибридных магнитных подшипников (например, в комбинации газовых или гидростатических с магнитными подшипниками на постоянных магнитах) и отсутствием возможности измерения угловой координаты.
Задача изобретения - расширение функциональных возможностей, благодаря возможности контроля положения ротора при всех типах бесконтактных подшипников и возможности измерения угловой координаты ротора, повышение надежности электрической машины с ротором на бесконтактных подшипниках, благодаря управлению положением ротора без датчиков, только по параметрам электрической машины, повышение точности контроля и управления, а также упрощение технической реализации, благодаря минимизации количества информационных каналов.
Техническим результатом является повышение точности управления и повышение надежности электрической машины с ротором на бесконтактных подшипниках, а также возможность применения во всех типах гибридных магнитных подшипников.
Поставленная задача решается и указанный результат достигается тем, что в способе бессенсорного управления положением ротора в бесконтактных подшипниках, заключающемся в измерении электрической величины, согласно изобретению, измеряют электродвижущую силу каждой фазы электрической машины и раскладывают ее на гармонические составляющие, измеряют выходное напряжение электрической машины и представляют его в двухфазной системе координат, в которой рассчитывают эквивалентные токи, измеряют скорость вращения ротора, и по изменению первой, третьей, девятой и сорок третьей гармоники электродвижущей силы судят о пространственном положении ротора, а по изменению напряжений, частоты вращения и эквивалентных токов в двухфазной системе координат судят об угловой координате ротора, при этом информация об изменении пространственного положения ротора и угловой координате поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов.
Кроме того, согласно изобретению, управляющие элементы могут быть выполнены в виде электромагнитов.
Также, согласно изобретению, управляющие элементы могут быть выполнены в виде газовых подшипников.
Также, согласно изобретению, управляющие элементы могут быть выполнены в виде гидродинамических подшипников.
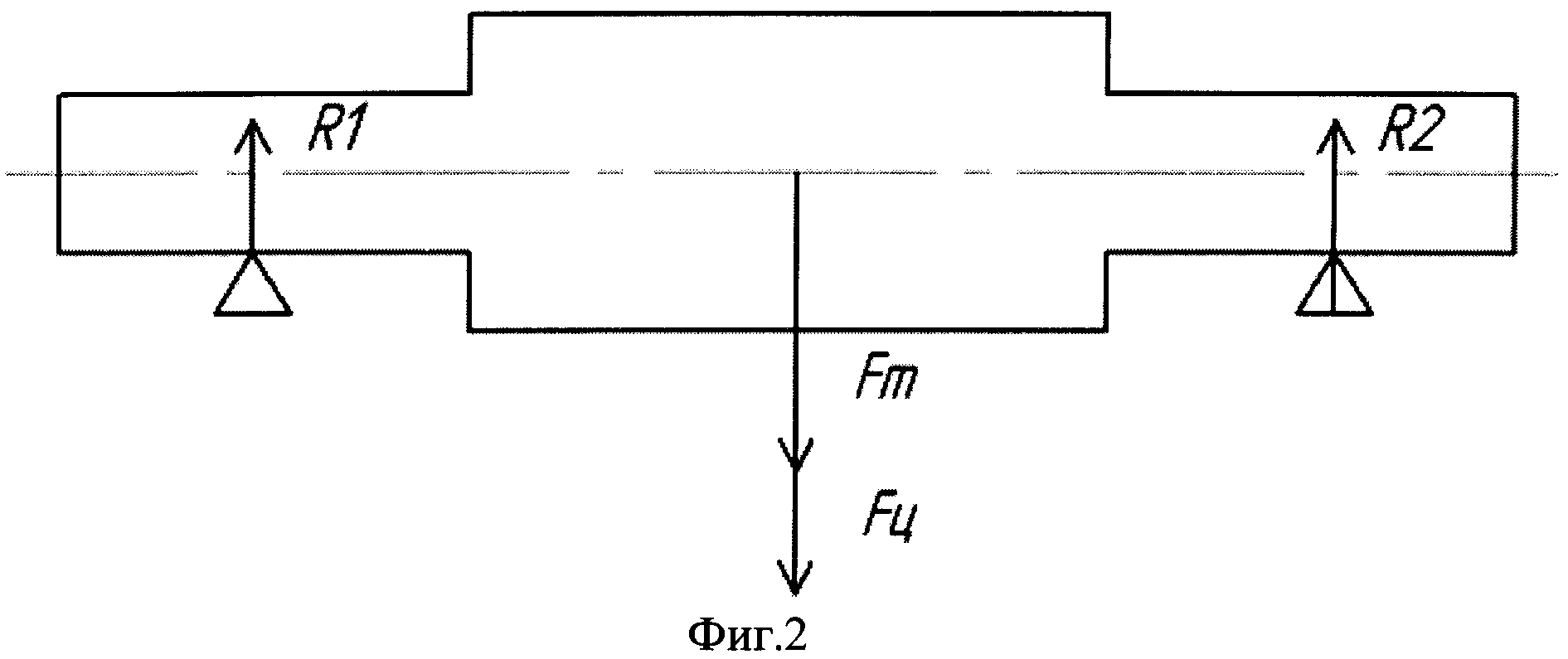
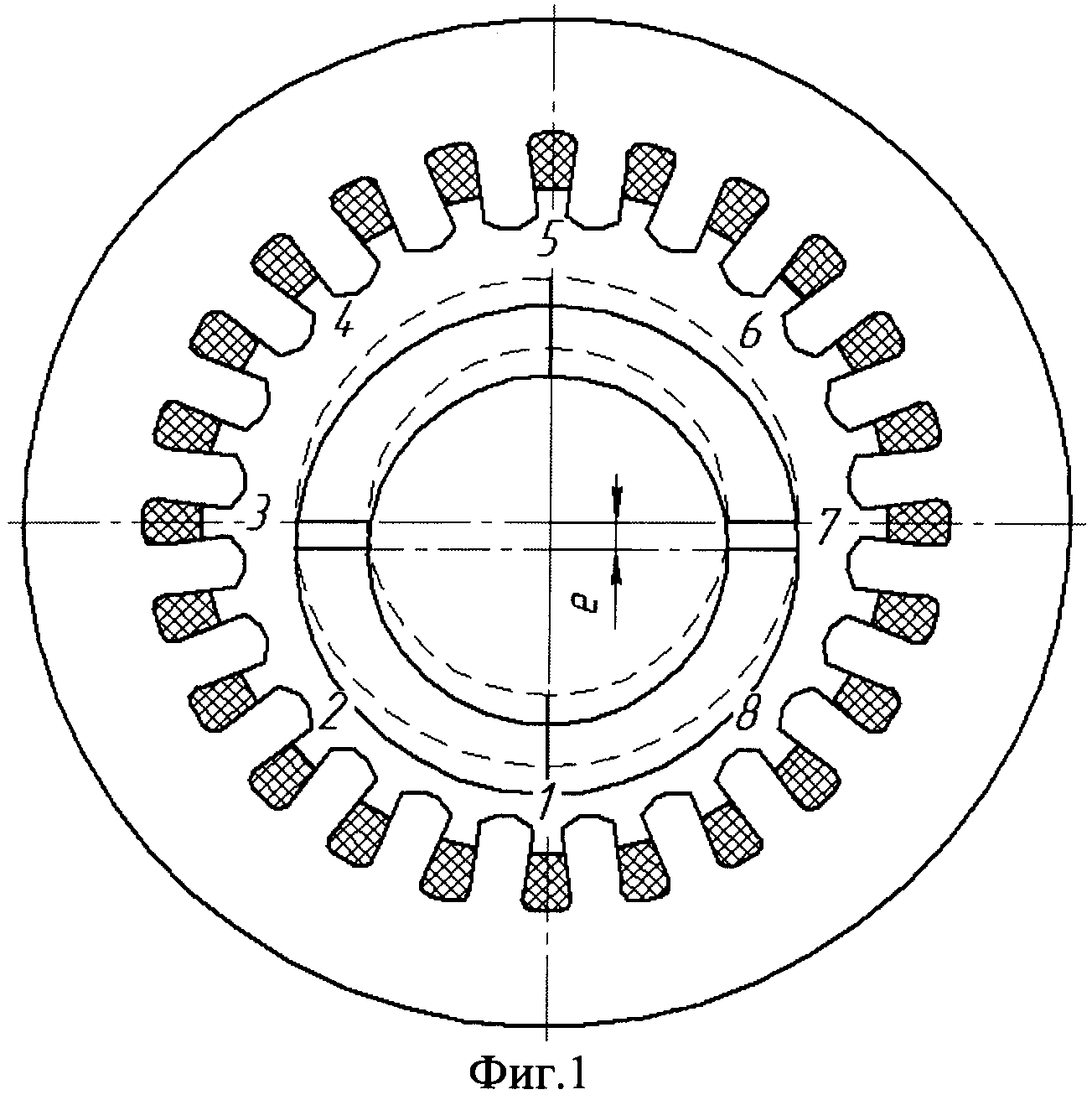
Существо изобретения поясняется чертежами. На фиг.1 изображена расчетная схема электрической машины при смещении ротора. На фиг.2 изображен баланс сил, действующих на ротор на магнитных подшипниках (на фиг.2: R1 - сила реакции первого подшипника, R2 - сила реакции второго подшипника, Fm - сила тяжести, Fц - центробежная сила).
Пример конкретной реализации способа.
Изменение воздушного зазора в электрической машине на бесконтактных подшипниках представляется в виде:

где δ - рабочий воздушный зазор;
δn - номинальный воздушный зазор;
x, y - пространственные координаты ротора (величина смещения ротора по осям x и y);
α - угловая координата ротора (угол поворота ротора).
Зависимость пространственных координат ротора от изменения гармоник описывается выражением:

k1, k2, k3, k4 - коэффициенты аппроксимирующего полинома;
Δν - величина отклонения гармоники ЭДС относительно симметричного режима.
При этом угловая координата (угол поворота ротора) в выражении (2) определяется из системы уравнений:

LS, R - индуктивность и активное сопротивление фазы;
iq, id - эквивалентные токи в двухфазной системе координат;
Uq, Ud - напряжения в двухфазной системе координат;
Ф - магнитный поток в рабочем зазоре электрической машины;
ω - угловая скорость ротора.
Тогда, при смещении ротора на 25% от номинального положения под действием центробежных сил (фиг.2), например, в высокоскоростном трехфазном магнитоэлектрическом генераторе на магнитных подшипниках возникают колебания ротора, при этом измеряется кривая электродвижущей силы для фаз A, B, C, которая раскладывается на гармонические составляющие, и анализируются первая, третья, девятая, сорок третья гармонические составляющие, так как на данные гармоники смещение ротора оказывает наибольшее влияние. Полученные значения для первой, третьей, девятой, сорок третьей гармоники электродвижущей силы поступают, например, в микропроцессор Arduino, где они сравниваются со значениями симметричного режима, занесенными ранее в память микропроцессора, и если измеренные значения первой, третьей, девятой, сорок третьей гармонических составляющих электродвижущей силы отличаются от занесенных в память микропроцессора значений симметричного режима, то определяется величина отклонения первой, третьей, девятой, сорок третьей гармоники электродвижущей силы относительно симметричного режима и по отклонению судят о положении ротора в пространстве, так для фазы A, B, C высокоскоростного трехфазного магнитоэлектрического генератора на магнитных, газовых или гидродинамических подшипниках значения первой, третьей, девятой, сорок третьей гармоник ЭДС симметричного режима составляют соответственно 117,5 В, 117,55 В, 117,55 В, 7,46 В, 7,524 В, 7,351 В, 3,36 В, 3,335 В, 3,299 В, 7,22 В, 7,285 В, 7,379 В, а измеренные соответственно 120,63 В, 120,58 В, 120,63 В, 7,664 В, 7,649 В, 7,533 В, 3,47 В, 3,451 В, 3,423 В, 7,776 В, 7,803 В, 7,820 В. Угловая координата ротора, определяемая по измеряемому напряжению в двухфазных координатах, частоте вращения и рассчитанному эквивалентному току в двухфазных координатах составляет 25 градусов. Полученные пространственные и угловая координаты ротора поступают в регулятор, изготовленный, например, на микросхеме КР140УД708, транзисторах КТ829, КТ315Г, КТ852, где рассчитывается управляющая величина, которую необходимо подать на управляющие элементы, которыми могу быть электромагниты, газовые или гидродинамические подшипники. Как следствие, посредством силового преобразователя увеличивается воздействие управляющих элементов на ротор высокоскоростного магнитоэлектрического генератора, который под действием силы управляющих элементов возвращается в исходное номинальное положение, и высокоскоростной трехфазный магнитоэлектрический генератор на магнитных, газовых или гидродинамических подшипниках эксплуатируется в нормальном режиме работы.
Таким образом, осуществляется бессенсорное управление положением ротора в бесконтактных подшипниках.
Итак, заявляемое изобретение позволяет расширить функциональные возможности, благодаря возможности контроля положения ротора при всех типах бесконтактных подшипников и возможности измерения угловой координаты ротора, повысить надежность электрической машины с ротором на бесконтактных подшипниках, благодаря управлению положением ротора без датчиков, только по параметрам электрической машины, повысить точность контроля и управления, а также упростить техническую реализацию, благодаря минимизации количества информационных каналов.
В результате повышается точность управления и надежность электрической машины с ротором на бесконтактных подшипниках, а также появляется возможность применения во всех типах гибридных магнитных подшипников.
Установка для очистки поверхностных сточных вод
Устройство стабилизации напряжения магнитоэлектрического генератора
Электромеханический преобразователь энергии с зубцовой концентрической обмоткой
Система электроснабжения летательного аппарата
Генератор электрической энергии для космического аппарата
Устройство для беспроводной чрескожной передачи энергии сердечному насосу
Рабочее колесо центробежного вентилятора с пустотелыми лопатками
Статор электрической машины с трубчатой системой охлаждения
Ротор магнитоэлектрической машины с низким уровнем нагрева постоянных магнитов (варианты)
Блок из двигателя и генератора для гибридной силовой установки самолета
Стартер-генератор с обмоткой статора с проводниками разного поперечного сечения

