Результат интеллектуальной деятельности: НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ
Вид РИД
Изобретение
Изобретение относится к области локации и радиоэлектронным устройствам слежения, преимущественно к наземному малогабаритному транспортному комплексу для освещения прибрежной обстановки, который включает транспортное средство (автомобиль), внутри базового шасси которого размещена аппаратура технического контроля и наблюдения за территорией береговой зоны и прибрежных (речных, озерных, морских) районов охраняемых объектов, обнаружения и распознавания объектов слежения. Под освещением в данном случае понимается информационное освещение, а именно получение и обработка данных об объектах, находящихся в исследуемой зоне.
Известны различные конструкции локационных систем. Например, известно локационное устройство по патенту РФ №2032918, МПК G01S 17/00, G01C 3/08 на изобретение. Локационное устройство содержит последовательно установленные и оптически сопряженные маломощный источник света, вращающееся однострочное оптико-механическое сканирующее устройство и контрольный фотоприемник; локационное устройство содержит также датчик угломестных координат, вход которого соединен с выходом контрольного фотоприемника, а выход - со вторым входом схемы сравнения, при этом вращающееся однострочное оптико-механическое сканирующее устройство также оптически сопряжено с лазерным передатчиком и механически жестко связано с вращающимся измерителем азимута и угла места. Зона сканирования вращающегося однострочного оптико-механического сканирующего устройства повернута относительно диаграммы направленности вращающегося измерителя азимута и угла места на ширину лазерного луча, а датчик угломестных координат выполнен в виде последовательно соединенных линии задержки, триггера, схемы совпадения, счетчика и постоянного запоминающего устройства, а также тактового генератора, выход которого соединен со вторым входом схемы совпадения; вторые входы триггера и счетчика и вход линии задержки соединены с выходом контрольного фотоприемника, выход постоянного запоминающего устройства является выходом датчика угломестных координат.
Локационное устройство работает следующим образом. Вращающийся измеритель азимута и угла места осуществляет определение азимута и угла места методом сравнения в процессе кругового обзора. Суммарная диаграмма направленности вращающегося измерителя азимута и угла места может состоять из ряда пересекающихся диаграмм направленности. Информация об угле места объектов с выхода измерителя азимута и угла места поступает на первый вход схемы сравнения. Синхронно с вращающимся измерителем азимута и угла места вращается однострочное оптико-механическое сканирующее устройство, осуществляющее формирование развертки лазерного 1а, работающего в ждущем импульсном режиме. Синхронно с лазерной разверткой формируется контрольная развертка от маломощного источника света. Зона сканирования лазерного луча смещена относительно суммарной диаграммы направленности вращающегося измерителя азимута и угла места по азимуту на величину ширины зоны сканирования. Поле зрения контрольного фотоприемника находится в рабочей зоне. После окончания движения луча вверх в момент облучения контрольного фотоприемника осуществляется выдача сигнала на установку в исходное состояние триггера и счетчика. Величина задержки в линии задержки равна времени установки триггера и счетчика в исходное состояние. Поле зрения контрольного фотоприемника совпадает с концом зоны сканирования в верхней ее части. При нахождении развертки от маломощного источника света в крайнем верхнем положении срабатывает контрольный фотоприемник, преобразующий световое излучение от этого маломощного источника в электрический сигнал, поступающий в датчик угломестных координат, состоящий из линии задержки, триггера, схемы совпадения, счетчика, постоянного запоминающего устройства (ПЗУ) и тактового генератора. Сигнал с контрольного фотоприемника сначала устанавливает триггер и счетчик в исходное состояние, а далее через линию задержки устанавливает триггер снова в единичное состояние. При этом триггер выдает разрешение схеме совпадения на прохождение тактовых импульсов с тактового генератора на вход счетчика, который считает количество этих тактовых импульсов и выдает двоичный код, характеризующий угломестные координаты, в ПЗУ для осуществления считывания содержащейся в нем информации об углах места, соответствующей определенным значениям вышеупомянутых двоичных кодов. Когда угломестный код с выхода вращающегося измерителя совпадет с угломестным кодом, поступающим с выхода датчика угломестных координат, сработает схема сравнения, выходной сигнал которой обеспечивает формирование модулятором сигнала, разрешающего излучение светового импульса лазерным передатчиком. Дальность определяется в измерителе дальности по временному рассогласованию между сигналом с выхода модулятора и сигналом с выхода лазерного приемника.
Недостатками указанного локационного устройства является сложность конструкции, затрудняющая его размещение в мобильном комплексе, ограниченность оптическим диапазоном волн, следствием чего является слабая защищенность от помех, вызываемых гидрометеорами, то есть продуктами конденсации водяного пара в атмосфере: росой, инеем, туманом, облаками, дождем, снегом, градом и проч.
Известна также мобильная трехкоординатная радиолокационная станция (РЛС) дециметрового диапазона по патенту РФ №2394253, МПК G01S 13/00 на изобретение. РЛС содержит антенно-мачтовое устройство (АМУ), в которое входят переключатель положения луча на передачу (ППЛ), фазированная антенная решетка (ФАР) и устройство ориентирования и топопривязки (УОТ). В РЛС также входит передающее устройство (ПУ), устройство обработки и управления (УОУ), аппаратура системы госопознавания (АСГ), опорно-поворотное устройство (ОПУ), устройство развертывания и свертывания (УРС), транспортное средство (ТС), на котором размещены все перечисленные устройства, и источник первичного электропитания. ПУ своим выходом соединено с первым входом ППЛ, первый и второй выходы которого соединены с первым и вторым входами ФАР, вход-выход которой через АСГ соединен с первым входом-выходом УОУ, n входов которого соединены с n выходами ФАР, (n+1) - и вход - с выходом УОТ, первый выход - с входом ПУ, третий - со вторым входом ППЛ, а второй выход является выходом РЛС, второй вход-выход УОУ соединен с ОПУ, выход которого механически соединен с первым входом АМУ, второй вход которого, так же как и третий вход ФАР и вход ТС, механически соединены с первым, вторым и третьим выходами УРС соответственно. Конструктивно АМУ выполнено в виде силового ствола, на котором закреплена ФАР, и размещено на платформе ТС. ППЛ представляет собой двухпозиционный переключатель СВЧ-энергии с управляемым электроприводом и размещен в силовом стволе АМУ. ФАР состоит из трех вертикальных панелей с n горизонтальными приемо-передающими линейками полуволновых вибраторов локационной антенны и линейками антенны системы госопознавания. Центральная панель ФАР, шарнирно связанная с двумя боковыми панелями, жестко закреплена на силовом стволе. В состав ФАР входят также диаграммообразующее устройство на передачу, которое содержит делители мощности, фазовращатели и циркуляторы (по количеству приемо-передающих линеек локационной антенны ФАР) и размещено в силовом стволе АМУ, и n приемных модулей в количестве приемо-передающих линеек локационной антенны ФАР, размещенных также в силовом стволе АМУ. Каждый приемный модуль содержит диодный ограничитель, фильтр, смеситель, малошумящий усилитель, аналого-цифровой преобразователь и маломощный источник вторичного электропитания. УОТ состоит из блока обработки и антенны и осуществляет автоматическое ориентирование и топопривязку РЛС с использованием систем ГЛОНАСС и GPS. Блок обработки размещен в силовом стволе АМУ, а антенна закреплена на верхней кромке ФАР. ПУ может быть выполнено на базе импульсного электровакуумного или твердотельного монопередатчика. УОУ выполнено на базе специализированной ЭВМ с необходимым программным обеспечением, позволяющим осуществлять пространственно-временную обработку сигналов, обнаружение и измерение координат, сопровождение и распознавание типов летательных аппаратов, управление работой РЛС и ее устройств (ППЛ, ПУ, АСГ, ОПУ), а также выдачу необходимой информации потребителю. АСГ представляет собой часть стандартной системы госопознавания "запрос - ответ" и связана с антенной системы госопознавания, расположенной в ФАР. ОПУ содержит основание для установки АМУ, привод вращения, редуктор и датчик угла поворота ФАР в горизонтальной плоскости. УРС - автоматическая система гидравлических механизмов подъема и опускания АМУ, раскладывания и складывания боковых панелей ФАР, а также горизонтирования платформы ТС, которое содержит гидравлические опоры. Элементы ПУ, УОУ, АСГ, ОПУ и УРС размещены как на платформе ТС, так и на АМУ. Электрические соединения между аппаратурой, размещенной на платформе ТС и АМУ, осуществляются через вращающийся токосъемник. РЛС может размещаться на неподготовленной позиции. В транспортном положении АМУ опущено центральной панелью ФАР на платформу ТС, а боковые панели сложены и прижаты к силовому стволу.
РЛС работает следующим образом. Вначале при помощи УРС производят развертывание РЛС: подъем АМУ, раскладывание боковых панелей ФАР и горизонтирование платформы ТС. Затем, вращая АМУ с ФАР посредством ОПУ, производят ориентирование и топопривязку РЛС, используя сигналы УОТ и ОПУ. При обзоре пространства сформированные ПУ короткие зондирующие импульсы определенной частоты, задаваемой по команде с выхода УОУ, подаются на вход переключателя ППЛ и с его выходов, в зависимости от команды с выхода УОУ, через делители мощности, фазовращатели и циркуляторы диаграммообразующего устройства ФАР поступают на верхнюю или нижнюю части приемо-передающих линеек локационной антенны ФАР, которая излучает их в пространство, формируя в угломестной плоскости нижний или верхний широкие лучи на передачу с зоной обзора, зависящей от положения переключателя ППЛ и начальной установки делителей мощности и фазовращателей диаграммообразующего устройства ФАР. Обзор пространства по азимуту осуществляется путем кругового вращения АМУ с ФАР при помощи ОПУ, управляемого по скорости устройством УОУ. Принятые всеми n приемо-передающими линейками локационной антенны ФАР эхо-сигналы через циркуляторы ее диаграммообразующего устройства поступают на соответствующие приемные модули, где усиливаются, преобразуются в цифровой вид и поступают на вход УОУ, где их подвергают пространственно-временной обработке, формируя веер узких лучей на прием, перекрывающих всю угломестную зону обзора. Данные об азимутальном положении ФАР поступают на УОУ с УОТ и ОПУ (с датчика угла поворота ФАР в горизонтальной плоскости). Данные о государственной принадлежности обнаруженных летательных объектов по запросу с входа-выхода УОУ поступают на УОУ из ФАР через АСГ. На основании полученной информации УОУ осуществляет обнаружение, опознавание, измерение координат и скорости, сопровождение летательных объектов, распознавание их типов и выдачу необходимой информации потребителям, а также управление работой РЛС и ее устройств.
Недостатками указанной РЛС является сложность конструкции, предопределяющая сложный алгоритм работы, требующий повышенных ресурсов вычислительной системы, применимость только для обзора воздушного пространства.
Наиболее близким по совокупности существующих признаков аналогом к заявленному изобретению (прототипом) является наземный транспортный комплекс для обнаружения и распознавания объектов по патенту РФ №2352480, МПК B60R 1/00, G08G 1/017 на изобретение.
Наземный транспортный комплекс для обнаружения и распознавания объектов содержит транспортное средство, преимущественно выполненное в виде автомобиля, в задней части крыши кузова которого образованы два люка, а салон разделен поперечной силовой перегородкой на два отсека: водительский и аппаратный. В аппаратном отсеке установлены соединенные с приводами два подъемно-мачтовых приспособления, включающих стойки, верхние части которых снабжены опорно-поворотными средствами с установленными на них и соединенными с системой электропитания радиоэлектронными датчиками системы обнаружения и распознавания объектов, выполненными с возможностью прохождения через соответствующие люки и размещения в рабочем положении над крышей кузова автомобиля. Над датчиками закреплены крышки люков, а средство управления датчиками и средство отображения данных установлены на силовой перегородке.
Основные датчики комплекса - оптико-электронный модуль (ОЭМ) и радиолокационный модуль (РЛМ), размещены на двух унифицированных конструкциях, представляющих собой подъемно-мачтовые приспособления со стойками (ПМУ) с закрепленными на них в верхней части опорно-поворотными средствами (ОПУ), управляемыми с помощью электродвигателей.
Входящие в комплекс радиолокационный и оптико-электронный модули связаны единым алгоритмом управления, обработки, документирования, отображения и передачи информации. Всесуточность и всепогодность комплекса обеспечивается сочетанием радиоэлектронных датчиков, работающих в сантиметровом (9 ГГц), ближнем (10 микрон) и дальнем (1,5 микрон) инфракрасном, а также видимом диапазонах спектра. Электродвигатели ПМУ размещаются на полу отсека, на стойке ПМУ закреплена нижняя крышка люка, а сама стойка крепится к полу с помощью опорной плиты, а к силовой перегородке в верхней части с помощью кронштейна.
На усиленном полу в аппаратном отсеке кроме ПМУ с электродвигателями размещены и закреплены блок вторичного электропитания (изделие «Дубровник») и на специальных опорных стойках, установленных в вырезах кожухов надколесных ниш, аккумуляторные батареи СТ 190.
Аппаратура, расположенная на ОПУ ПМУ, поднимается из походного (нерабочего) в рабочее положение с помощью приводов и ременных передач специального профиля.
Конструкция каждого ПМУ имеет две крышки: верхнюю и нижнюю и рассчитана таким образом, чтобы в походном положении люки в крыше автомобиля герметично закрывались верхними крышками, а в рабочем положении - нижними. Это защищает внутренний объем аппаратного отсека от атмосферных осадков как в походном, так и в рабочем положении.
Аппаратура, размещенная на ОПУ, имеет возможность вращаться со скоростями до 65 градусов в двух плоскостях (азимутальной и угломестной) в пределах допустимых углов поворота, в результате чего оптические оси полей зрения ОЭМ и электрическая ось антенны РЛМ перемещаются в пространстве и имеют возможность занимать положение, требуемое для обнаружения или распознавания наземных целей.
Например, ОПУ обеспечивают сканирование размещаемой на них аппаратуры в пределах 360 градусов по азимуту и ±30 градусов от горизонта по углу места. Это достигается наличием в каждом ОПУ двух приводов, состоящих из электродвигателя, ременной передачи, шкивов и датчика угла, а также контроллера, обрабатывающего приходящие на него с процессорных блоков команды управления.
РЛМ - это твердотельная цифровая когерентная радиолокационная станция (РЛС) трехсантиметрового диапазона с системой селекции движущихся целей (СДЦ). РЛС имеет системы автоматического сопровождения движущихся целей с отображением информации на фоне цифровой карты местности, а также режим прослушивания доплеровских сигналов от целей на наушниках и вывода этих сигналов (спектров) в графическом виде на монитор РМО. ОЭМ объединяет в себе тепловизор, видеокамеру и лазерный дальномер.
РЛС обеспечивает режим управления ОЭМ (режим целеуказания), в котором оптическая ось оптико-электронного модуля автоматически доворачивается на выбранную оператором комплекса цель, а также режимы документирования информации о целях, взятых на сопровождение (с последующим просмотром обстановки), и вывода звуковых сигналов от цели на наушники.
В комплексе функционирует двухпроцессорная система, обеспечивающая работу рабочего места оператора, рабочего места командира, радиолокационного и оптико-электронного модулей, системы спутниковой навигации и ориентирования на местности. В состав системы обработки и документирования информации входят два унифицированных процессорных модуля, преобразователь интерфейсов, коммутатор и консоли управления ПМУ и ОПУ.
Специальное программное обеспечение комплекса функционирует в операционных системах Windows XP (оптико-электронный модуль) и Mandrake Linux (радиолокационный модуль).
Кроме основного рабочего места оператора, с которого осуществляется управление режимами работы всех систем комплекса, изделие имеет монитор рабочего места командира (РМК), который конструктивно встроен в переднюю панель салона автомобиля.
На штатное место в кассету для автомобильного приемника установлена УКВ-радиостанция, габаритные размеры которой соответствуют размерам кассеты автомобиля.
Между сиденьями водительского отсека размещены органы управления системой жизнеобеспечения комплекса и сигнально-громкоговорящей установкой.
Комплекс рассчитан на экипаж (расчет) из трех человек: водитель, командир расчета и оператор, при этом вся аппаратура может управляться одним оператором, который размещается на специальном кресле, которое может вращаться вокруг вертикальной оси и передвигаться вдоль продольной оси автомобиля. Кресло имеет раздельные регулировки сиденья, спинки и подлокотников, что позволяет в условиях ограниченного объема салона выставить такое его положение, которое будет максимально удобно для оператора. В походном положении оператор размещается лицом по ходу автомобиля, в рабочем положении - лицом к пультам на перегородке салона.
В комплексе для определения углов наклона шасси при выборе позиции используется инклинометр, для привязки осей координат РЛС к северу - электронный магнитный компас, для определения местоположения изделия с его отображением на ЦКМ - спутниковая навигационная GPS-система.
Система электропитания комплекса выполнена с тройным резервированием: аппаратура комплекса может запитываться от промышленной сети 220 В, 50 Гц через встроенный блок вторичного электропитания с выходным напряжением 24 В постоянного тока (изделие «Дубровник»), от входящего в состав комплекса возимого бензоагрегата мощностью 2 кВт или от специальной аккумуляторной батареи, размещаемой в заднем отсеке.
Блок питания «Дубровник» служит для преобразования напряжения переменного тока 220 В, 50 Гц в постоянное напряжение 24 В и подключается к изделию с пульта оператора только при использовании внешних источников питания (промышленная сеть или бензоэлектроагрегат).
В состав комплекса может быть включен выносной прожектор, например Мегарэй-175, который устанавливают на треноге, и сигнально-громкоговорящая установка СГУ-200 «Вепрь» в варианте скрытой установки.
Однако и этот комплекс имеет недостатки. В частности, в силу самого принципа работы когерентной радиолокационной станции он не способен обнаруживать и идентифицировать неподвижные надводные цели, и имеет очень низкую способность к обнаружению и распознаванию объектов в условиях помех от гидрометеоров, взволнованной водной поверхности, ограниченной видимости и т.д. Также недостатком прототипа является сложная система развертывания, при которой необходимо соблюдать определенный алгоритм подъема и относительной работы оптико-электронного и радиолокационного модулей во избежание их повреждения. К тому же прототип не имеет возможности скрытного передвижения в ночное время и требует выбора ровной площадки для размещения транспортного средства перед началом работы - все это ведет к потере времени, имеющего большое значение для успеха операции.
Задачей, поставленной авторами данной разработки, является создание такого наземного малогабаритного транспортного комплекса, с помощью которого можно было бы обнаруживать и идентифицировать не только подвижные надводные объекты, но и неподвижные, причем с высокой степенью четкости и объективности обнаружения, а также идентификации этих объектов при работе в условиях гидрометеоров, взволнованной водной поверхности или ограниченной видимости, вследствие, например, тумана. Кроме того, задачей, поставленной авторами, является упрощение конструкции комплекса и повышение эффективности его работы. Техническим результатом, достигнутым при решении поставленной задачи, является повышение помехоустойчивости, включая помехозащищенность отдельных блоков комплекса. Кроме того, техническим результатом, достигнутым при решении поставленной задачи, является возможность монтирования блоков комплекса на одном подъемно-мачтовом устройстве. Вместе с тем, техническим результатом, достигнутым при решении поставленной задачи, является увеличение скорости и удобства развертывания комплекса, а также обеспечение скрытности его передвижения в ночное время.
Сущность изобретения состоит в том, что в наземном малогабаритном транспортном комплексе для освещения прибрежной обстановки, состоящем из наземного транспортного средства, радиолокационной станции, оптико-электронной системы, системы электропитания, наземное транспортное средство выполнено с возможностью скрытого ночного передвижения; радиолокационная станция выполнена в виде импульсной некогерентной радиолокационной станции, причем приемопередатчик, антенна и привод вращения антенны в ее составе объединены в единый модуль антенно-приемопередатчика, установленный на общем подъемно-мачтовом приспособлении с модулями видеокамеры и тепловизора оптико-электронной системы, которая выполнена с возможностью получения данных целеуказания от радиолокационной станции и имеет опорно-поворотное устройство, видеоконвертор и вычислительный модуль, соединенный с датчиком угла наклона; вычислительный модуль РЛС выполнен с возможностью получения и обработки данных от приемника автоматизированной информационной системы, позволяющего идентифицировать надводные цели, а также от приемника GPS/GLONASS и пеленгатора спутниковых систем связи; блок обработки информации в РЛС представляет собой радар-процессор, осуществляющий цифровую обработку радиолокационных эхо-сигналов, причем радар-процессор соединен через коммутатор посредством канала Ethernet с ЭВМ, выполненной в виде вычислительного устройства, хранящего и обрабатывающего информацию электронной карты, интегрирующего ее с радиолокационным изображением и выдающего на видеомонитор.
Также сущность изобретения состоит в том, что в наземном малогабаритном транспортном комплексе для освещения прибрежной обстановки, радиолокационная станция имеет диаграмму направленности в вертикальной плоскости в пределах 23-28 градусов.
Кроме того, сущность изобретения состоит в том, что в наземном малогабаритном транспортном комплексе для освещения прибрежной обстановки программное обеспечение радиолокационной станции и оптико-электронной системы выполнено с возможностью его функционирования под управлением операционной системы Ubuntu Linux.
Вместе с тем, сущность изобретения состоит в том, что наземный малогабаритный транспортный комплекс для освещения прибрежной обстановки выполнен с возможностью передачи радиолокационной, оптической и служебной информации внешним потребителям.
Также сущность изобретения состоит в том, что в наземном малогабаритном транспортном комплексе для освещения прибрежной обстановки пеленгатор спутниковых систем связи выполнен с возможностью определения координат работающих спутниковых систем связи и выведения полученных координат через вычислительный модуль РЛС на видеомонитор РЛС в виде цифрового значения координат и в виде точки, привязанной к карте местности.
Кроме того, сущность изобретения состоит в том, что наземный малогабаритный транспортный комплекс для освещения прибрежной обстановки выполнен с возможностью автоматического переключения работы на питание от аккумуляторной батареи.
Вместе с тем, сущность изобретения состоит в том, что наземный малогабаритный транспортный комплекс для освещения прибрежной обстановки выполнен с возможностью автоматической подзарядки аккумуляторной батареи при штатной работе комплекса от бензиновой электростанции или промышленной сети.
Доказательства возможности осуществления мобильного автоматизированного комплекса с реализацией указанного назначения приводятся ниже на конкретном примере мобильного автоматизированного комплекса. Этот характерный пример выполнения конкретного мобильного автоматизированного комплекса согласно предлагаемому изобретению ни в коей мере не ограничивает его объем правовой защиты. В этом примере дана лишь конкретная иллюстрация предлагаемого мобильного автоматизированного комплекса. Изобретение поясняется графически, где:
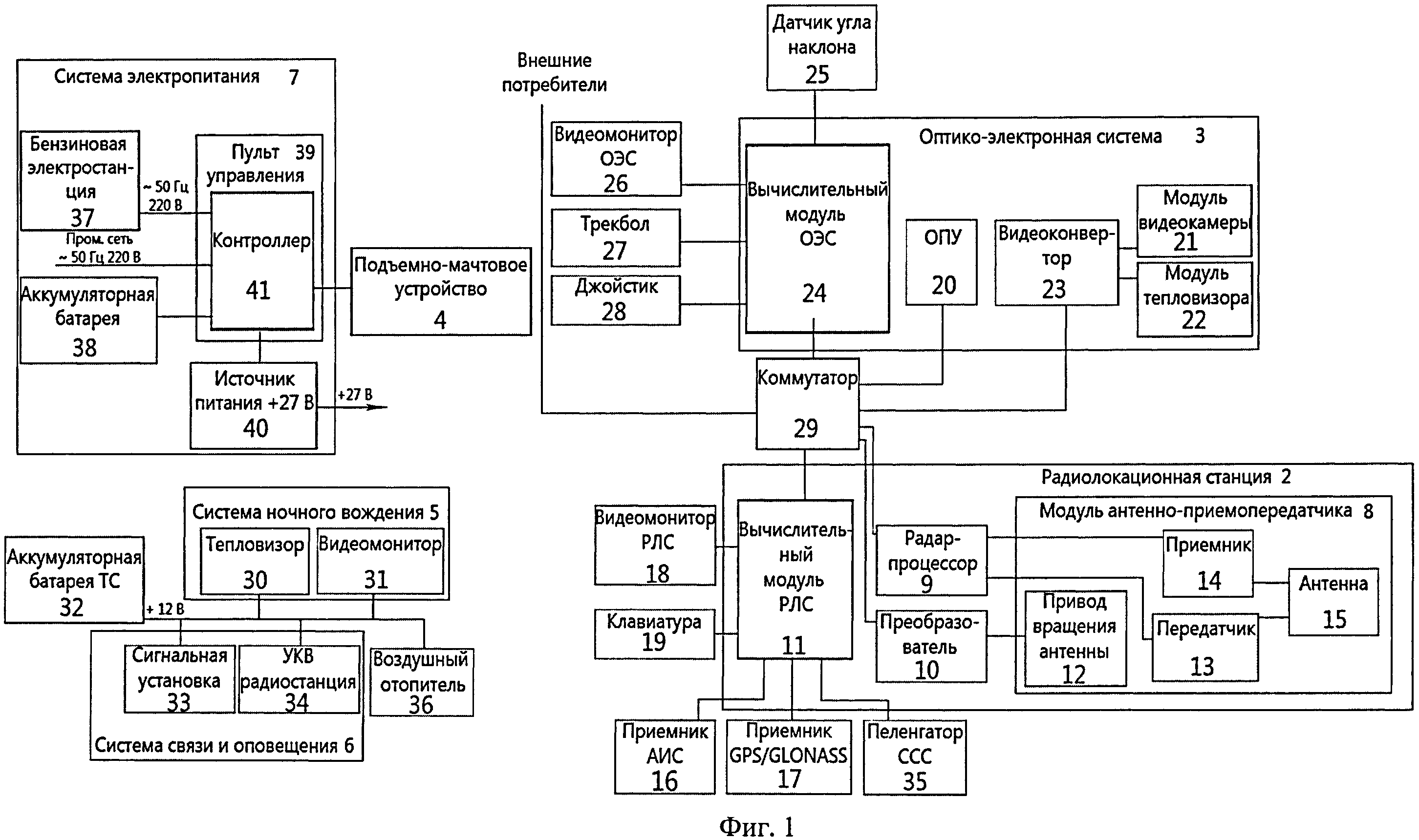
на фиг. 1 изображена структура наземного малогабаритного транспортного комплекса;
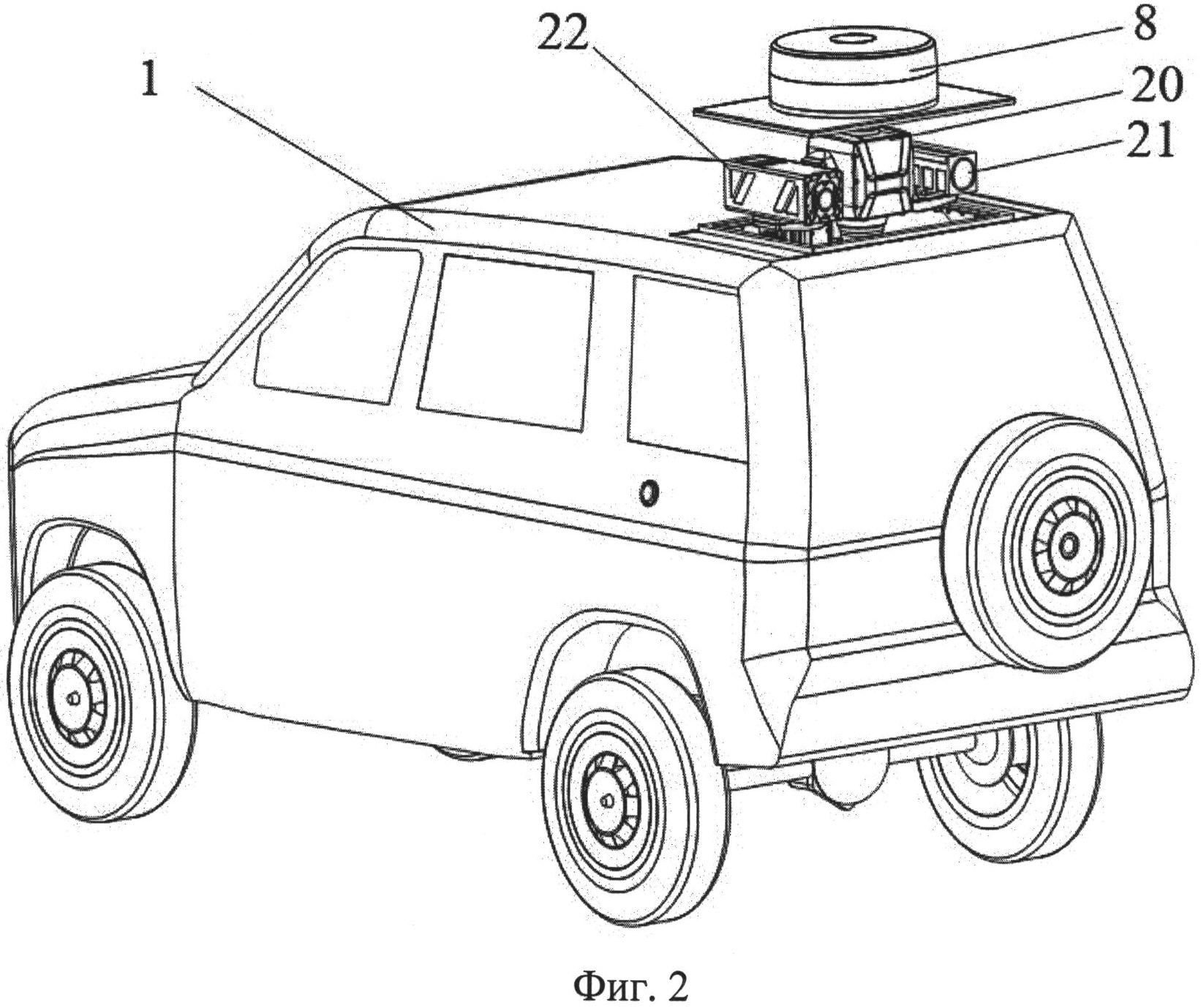
на фиг. 2 изображен наземный малогабаритный транспортный комплекс в аксонометрической проекции, вид сзади;
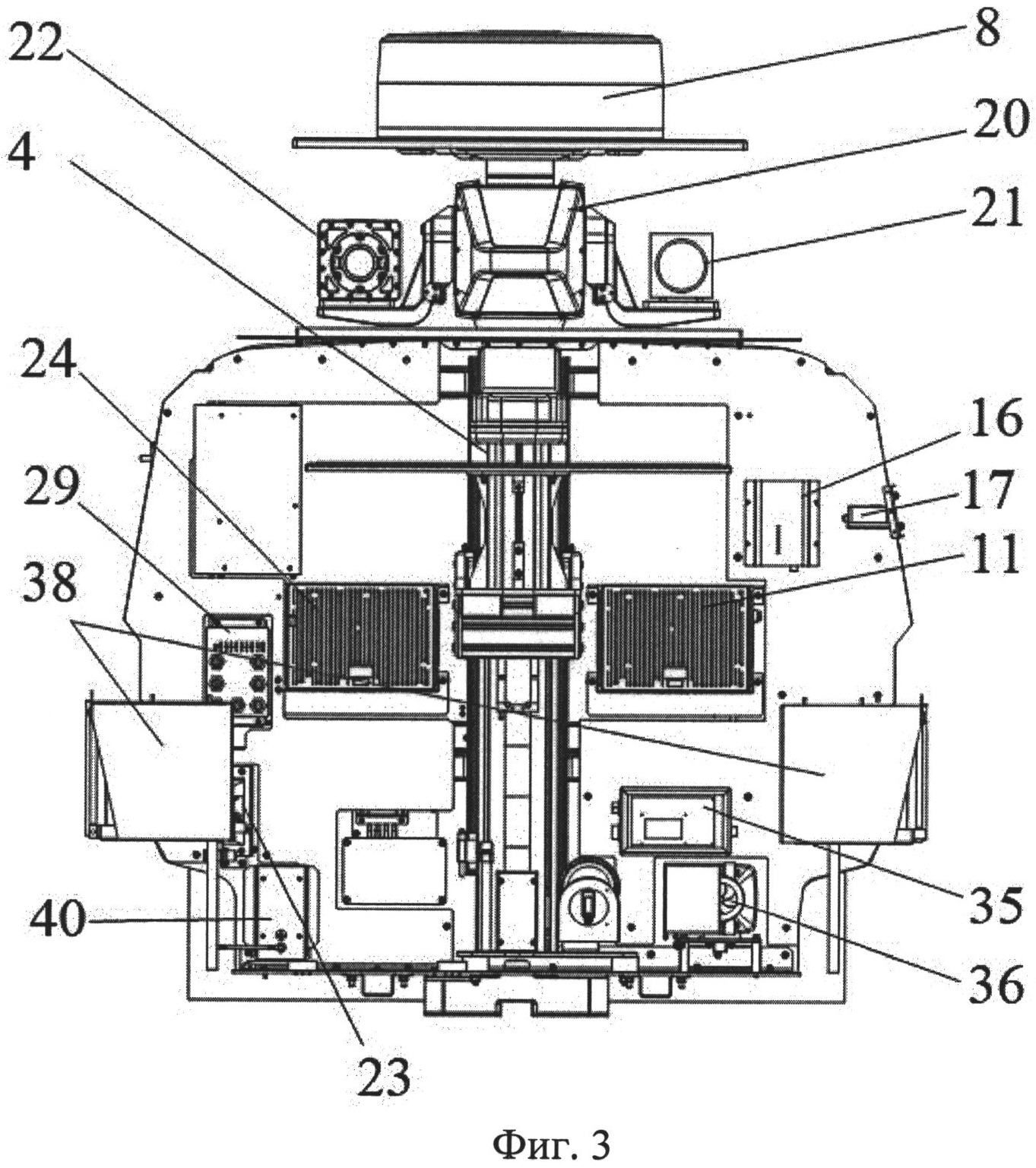
на фиг. 3 изображен технологический отсек комплекса;
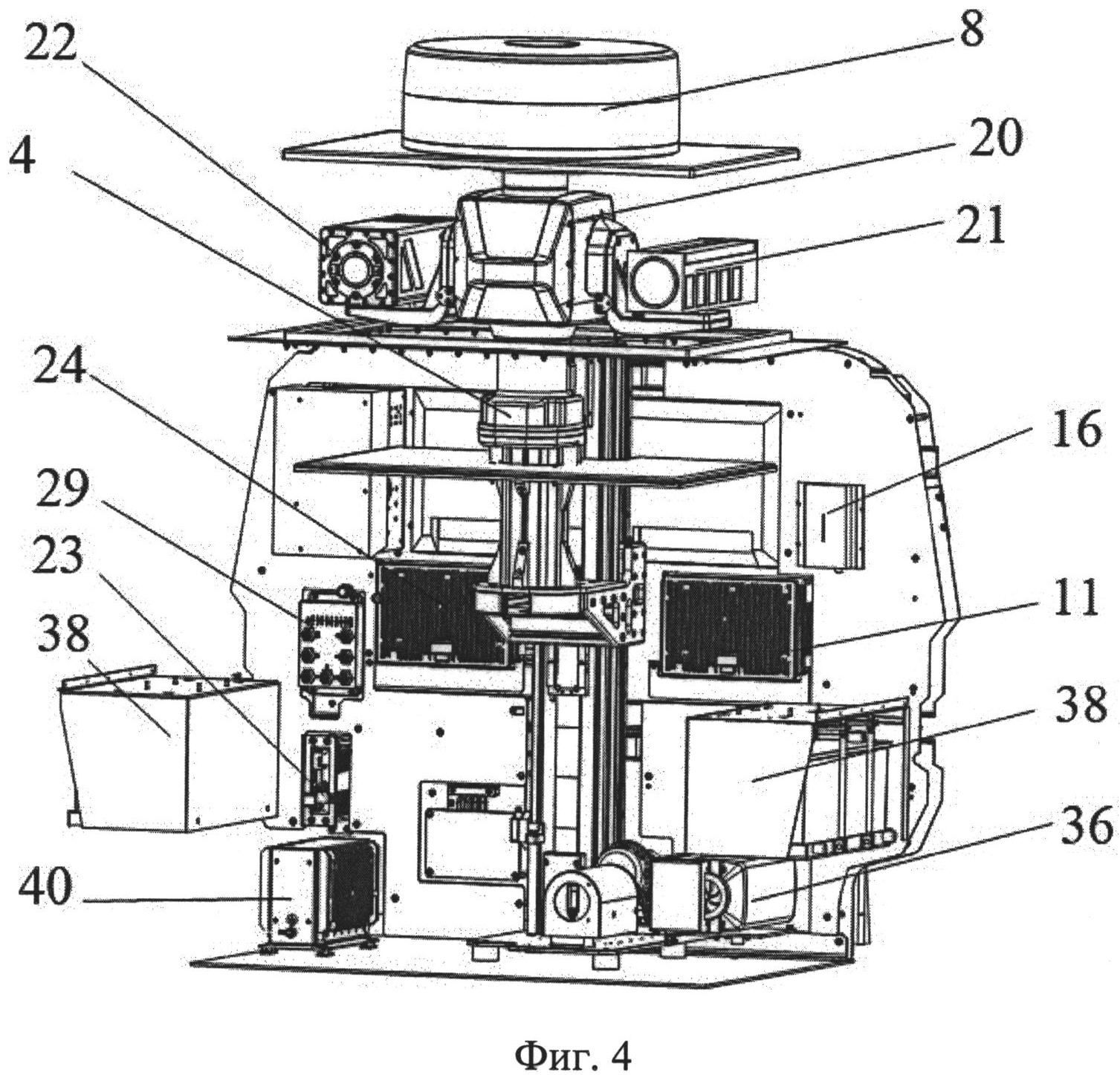
на фиг. 4 изображен технологический отсек комплекса в аксонометрической проекции;
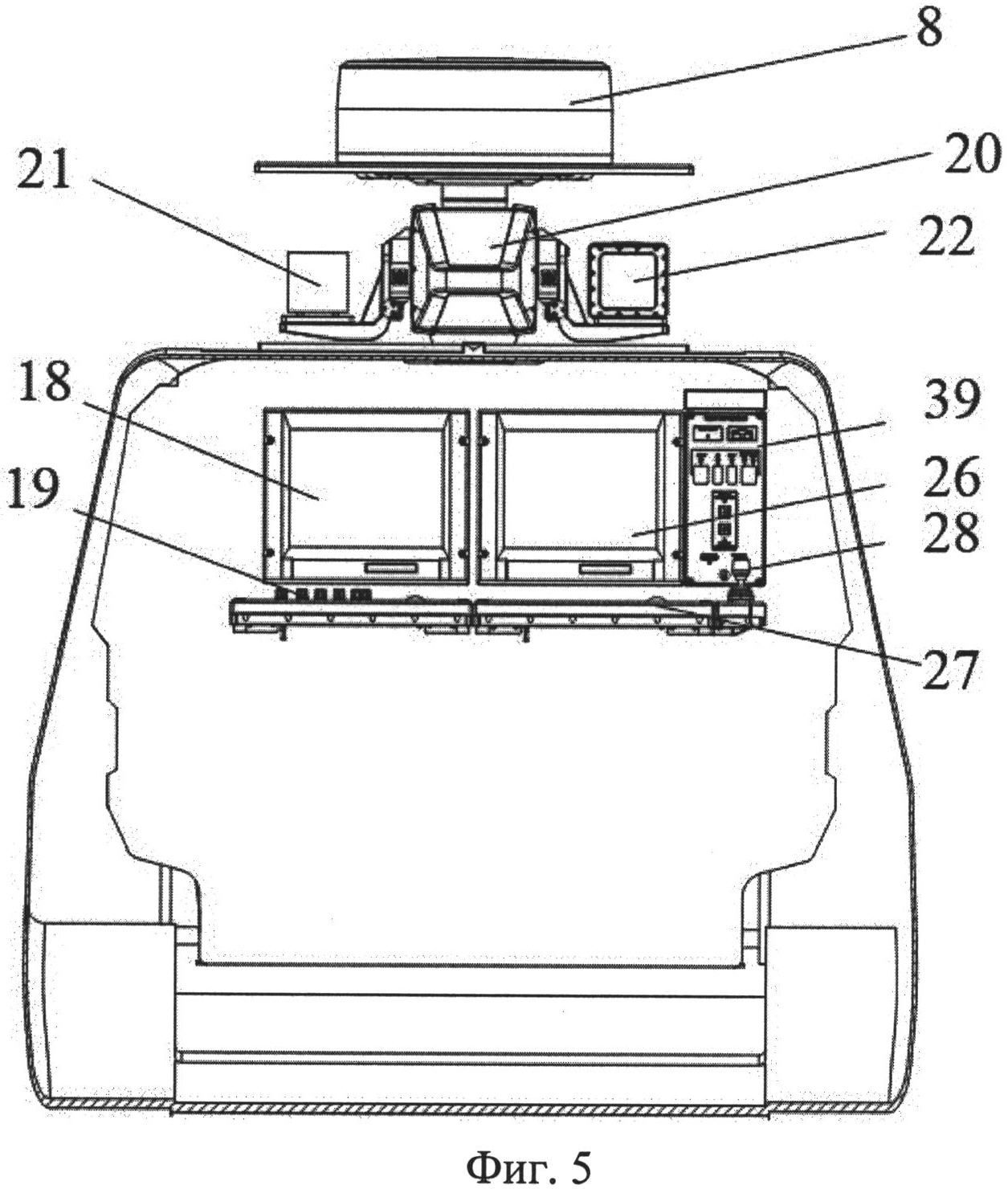
на фиг. 5 изображен отсек оператора;
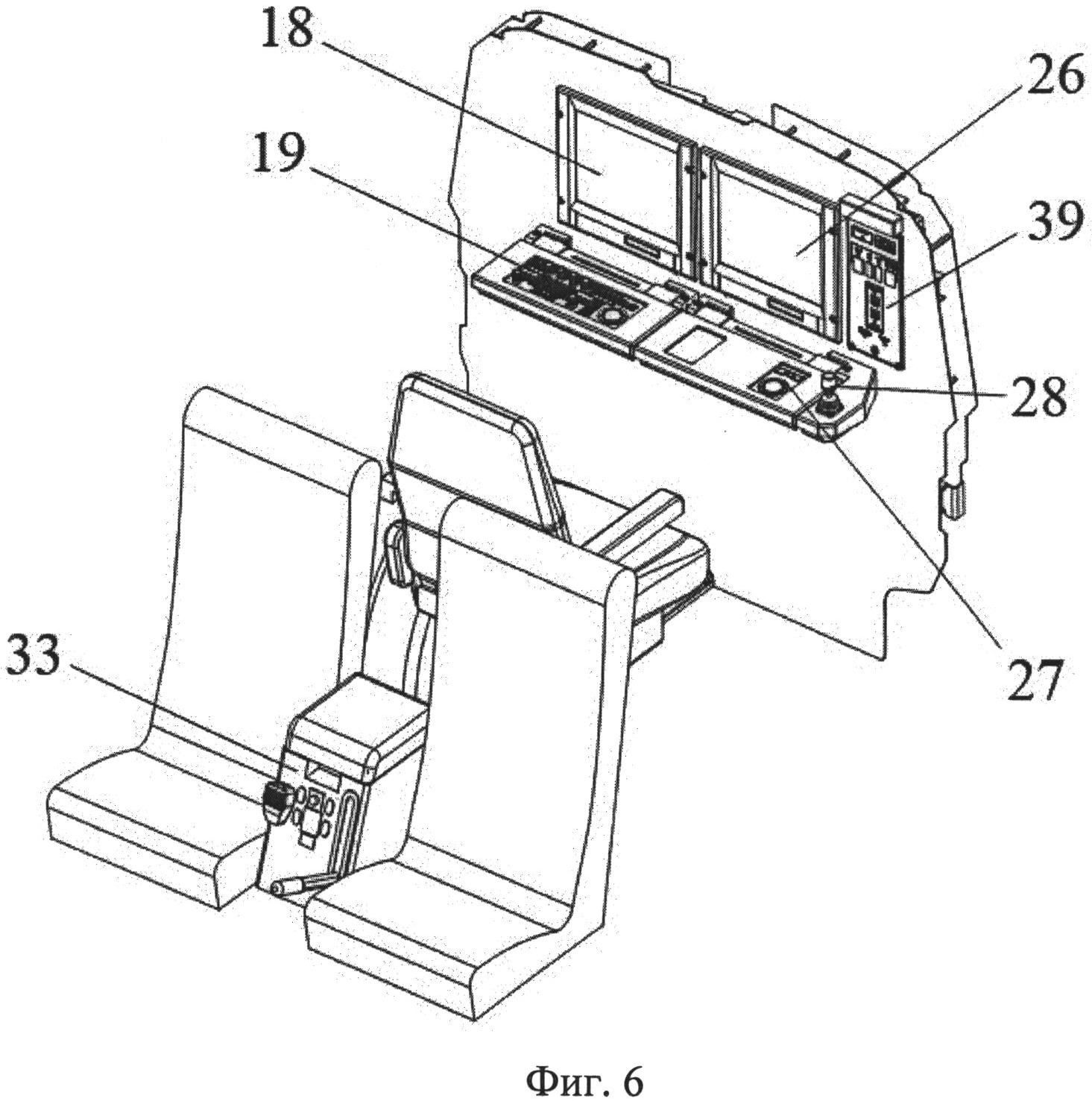
на фиг. 6 изображен отсек оператора в аксонометрической проекции;
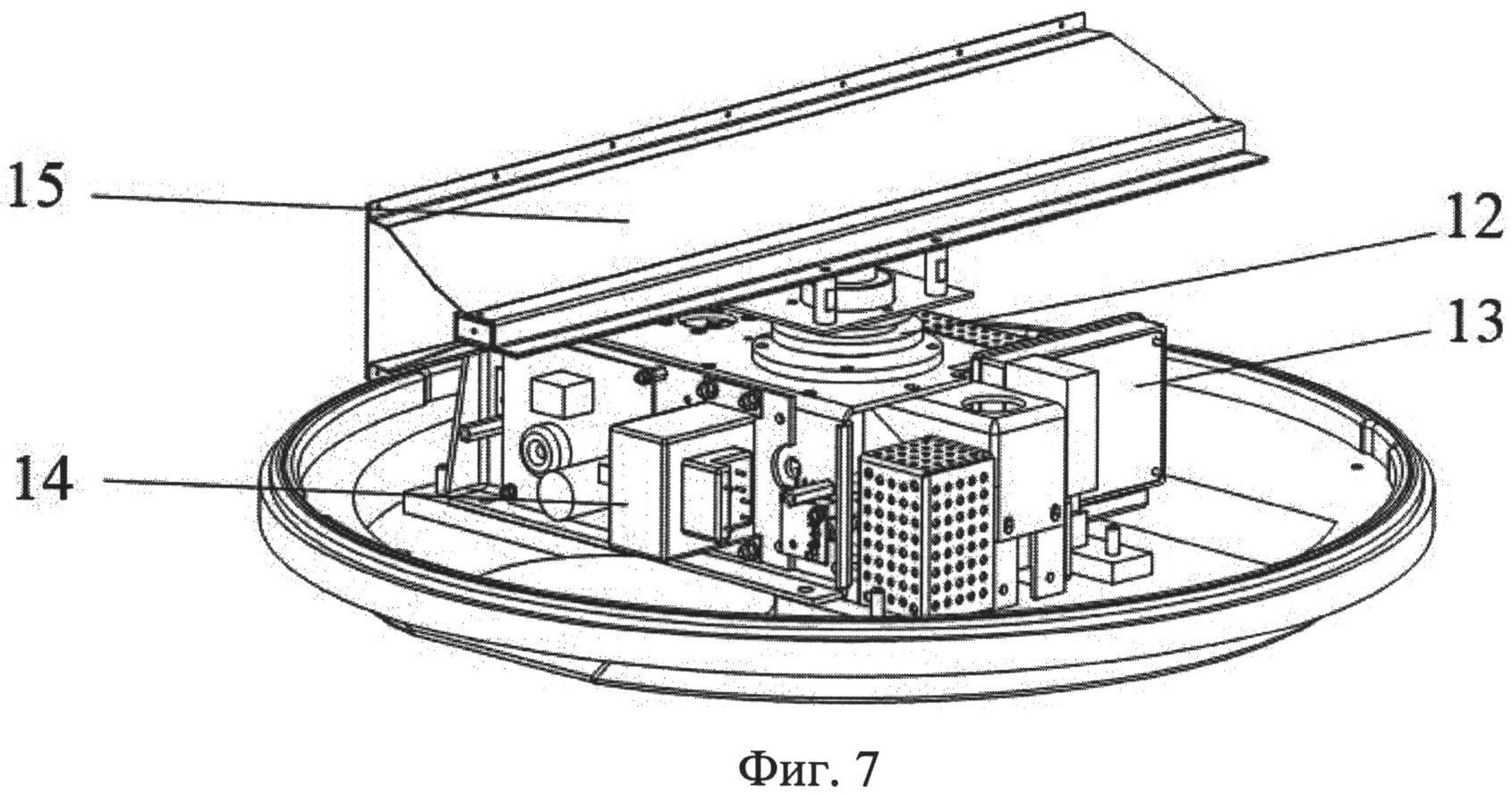
на фиг. 7 изображен модуль антенно-приемопередатчика (со снятым кожухом) в аксонометрической проекции;
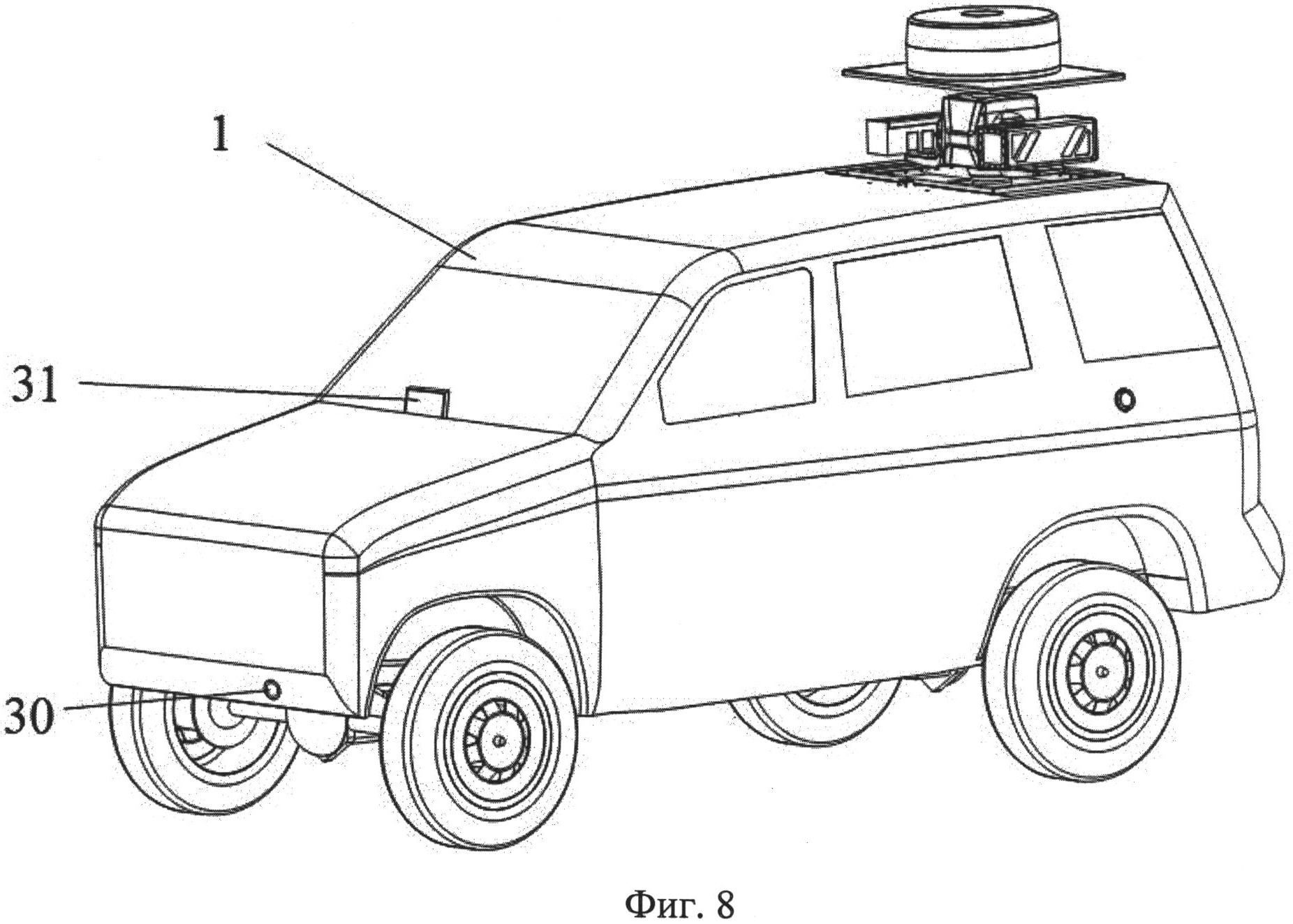
на фиг.8 изображено транспортное средство в аксонометрической проекции с указанием размещения неохлаждаемого тепловизора и видеомонитора системы ночного вождения.
Наземный малогабаритный транспортный комплекс состоит из транспортного средства 1, радиолокационной станции (РЛС) 2, оптико-электронной системы (ОЭС) 3, подъемно-мачтового устройства 4, системы ночного вождения 5, системы связи и оповещения 6, системы электропитания 7.
РЛС 2 состоит из модуля антенно-приемопередатчика 8, радар-процессора 9, преобразователя 10, вычислительного модуля РЛС 11. Модуль антенно-приемопередатчика 8 в свою очередь содержит привод вращения антенны 12, передатчик 13, приемник 14 и антенну 15. Передатчик 13 при этом выполнен с возможностью вобуляции периода следования импульсов для улучшения подавления квазисинхронных импульсных помех от других РЛС, а также для подавления ложных отметок на неоднозначных дальностях. Вход управления привода вращения антенны 12 соединен с выходом преобразователя 10. Сигнальные выходы приемника 14 соединены с входами радар-процессора 9. Вычислительный модуль РЛС 11 соединен с приемником автоматизированной информационной системы (АИС) 16 и с приемником навигационной системы GPS/GLONASS 17. Выход видеоизображения вычислительного модуля РЛС 11 соединен с видеовходом видеомонитора РЛС 18. Кроме того, вычислительный модуль РЛС 11 соединен с клавиатурой 19, имеющей набор кнопок и трекбол.
ОЭС 3 состоит из опорно-поворотного устройства (ОПУ) 20, на котором установлены модуль видеокамеры 21 и модуль тепловизора 22. Кроме того, ОЭС 3 включает видеоконвертор 23 и вычислительный модуль ОЭС 24. Выходы модуля видеокамеры 21 и модуля тепловизора 22 соединены с входом видеоконвертора 23. Вычислительный модуль ОЭС 24 соединен с датчиком угла наклона 25. Выход видеоизображения вычислительного модуля ОЭС 24 соединен с видеовходом видеомонитора ОЭС 26. Вычислительный модуль ОЭС 24 соединен с трекболом 27 и джойстиком 28. ОПУ 20 и модуль антенно-приемопередатчика 8 установлены на подъемно-мачтовом устройстве 4. Входы-выходы канала Ethernet видеоконвертора 23, радар-процессора 9 и преобразователя 10 соединены с входом-выходом канала Ethernet коммутатора 29. Под Ethernet коммутатором 29 в данном случае понимают активное сетевое устройство, предназначенное для соединения нескольких узлов. Входы-выходы каналов Ethernet коммутатора 29 соединены с входом-выходом канала Ethernet вычислительного модуля ОЭС 24 и входом-выходом канала Ethernet вычислительного модуля РЛС 11.
Система ночного вождения 5 состоит из неохлаждаемого тепловизора 30, установленного в переднем бампере транспортного средства 1 и видеомонитора 31, установленного в поле зрения водителя транспортного средства 1. Вход видеосигнала видеомонитора 31 соединен с видеовыходом неохлаждаемого тепловизора 30. Вход напряжения постоянного тока видеомонитора 31 соединен с выходом аккумуляторной батареи транспортного средства (АБТС) 32.
Система связи и оповещения 6 состоит из сигнальной установки 33 и УКВ радиостанции 34. Входы напряжения постоянного тока сигнальной установки 33 и УКВ радиостанции 34 соединены с выходом АБТС 32.
Также наземный малогабаритный транспортный комплекс содержит пеленгатор спутниковых систем связи 35 и воздушный отопитель 36. Причем выход пеленгатора 35 соединен с входом вычислительного модуля РЛС 11, а вход напряжения постоянного тока воздушного отопителя 36 соединен с выходом АБТС 32.
Система электропитания 7 состоит из бензиновой электростанции 37, аккумуляторной батареи 38 напряжением 24 В постоянного тока, пульта управления 39 и источника вторичного питания 40. Вход напряжения переменного тока пульта управления 39 соединен с выходом напряжения переменного тока бензиновой электростанции 37, а выход напряжения переменного тока пульта управления 39 - с входом напряжения переменного тока источника вторичного питания 40. Вход напряжения постоянного тока пульта управления 39 соединен с выходом аккумуляторной батареи 38, и с выходом напряжения постоянного тока источника вторичного питания 40. Пульт управления 39 содержит контроллер 41, который выполнен с возможностью автоматического переключения источника вторичного питания 40 на питание от аккумуляторной батареи 38. Управляющий выход контроллера 41 соединен также с входом подъемно-мачтового устройства 4.
Работает наземный малогабаритный транспортный комплекс следующим образом. От бензиновой электростанции 37 или от промышленной сети подают переменный ток напряжением 220 В (~50 Гц), который при помощи пульта управления 39 передают на источник вторичного питания 40, где его преобразуют в постоянный ток напряжением 27 В, которым далее обеспечивают питание всех систем комплекса. Во время работы от бензиновой электростанции 37 или от промышленной сети, при помощи контроллера 41 из состава пульта управления 39 производят подзарядку аккумуляторной батареи 38, на которую, при невозможности работы от бензиновой электростанции 37 или от промышленной сети, автоматически переключают источник вторичного питания 40, чтобы избежать потери информации и перезагрузки вычислительных модулей. При помощи того же контроллера 41 из состава пульта управления 39 по команде оператора производят подъем подъемно-мачтового устройства 4 из походного положения в рабочее. При помощи клавиатуры 19 включают режим вращения антенны 15 и излучения в модуле антенно-приемопередатчика 8. Команду включения вращения через коммутатор 29 передают в преобразователь 10, с помощью которого преобразуют командный сигнал из Ethernet в RS-485.
Ethernet (от англ. ether - «эфир») - пакетная технология передачи данных преимущественно локальных компьютерных сетей. Стандарты Ethernet определяют проводные соединения и электрические сигналы на физическом уровне, формат кадров и протоколы управления доступом к среде - на канальном уровне модели OSI. Ethernet в основном описывается стандартами IEEE группы 802.3. Передачу данных можно осуществлять как с помощью коаксиального кабеля, так и с помощью витой пары или оптического кабеля. Использование последних дает ряд преимуществ, основное из которых - возможность работы в дуплексном режиме (узел может в любой момент времени и передавать, и принимать данные).
RS-485 (англ. Recommended Standard 485), EIA-485 (англ. Electronic Industries Alliance-485) - стандарт физического уровня для асинхронного интерфейса. Регламентирует электрические параметры полудуплексной многоточечной дифференциальной линии связи типа «общая шина». В стандарте RS-485 для передачи и приема данных используется одна витая пара проводов, иногда сопровождаемая экранирующей оплеткой или общим проводом. Передача данных осуществляется с помощью дифференциальных сигналов. Разница напряжений между проводниками одной полярности означает логическую единицу, разница другой полярности - ноль. Интерфейс является полудуплексным: узел не может одновременно и принимать, и передавать данные.
Далее из преобразователя 10 сигнал передают в привод вращения антенны 12, с помощью которого далее осуществляют вращение антенны 15 вокруг вертикальной оси. Команду включения излучения передают через коммутатор 29 в радар-процессор 9, а затем в передатчик 13. Затем с помощью передатчика 13 формируют сверхвысокочастотные (СВЧ) импульсы заданной мощности и длительности. Далее эти импульсы передают на антенну 15, при помощи которой излучают зондирующие сигналы в эфир и принимают отраженные от препятствий радиолокационные эхо-сигналы.
Диаграмма направленности антенны 15 в вертикальной плоскости составляет от 23 до 28 градусов - это позволяет осуществлять обзор без выбора ровной площадки для размещения транспортного средства 1 перед началом работы.
При помощи приемника 14 производят предварительное усиление и обработку эхо-сигналов. С выхода приемника 14 отраженный от цели радиолокационный эхо-сигнал подают в радар-процессор 9. Одновременно в радар-процессор 9 подают импульсы синхронизации, обеспечивающие определение дальности до препятствия, от которого получают отраженные эхо-сигналы, а также импульсы углового положения антенны 15. Используя радар-процессор 9 производят преобразование сигналов в цифровой вид и цифровую обработку радиолокационных эхо-сигналов, посредством некогерентного внутриимпульсного и межпериодного накопления огибающей радиолокационных эхо-сигналов и подавления несинхронных помех от однотипных и аналогичных РЛС. 3атем при помощи этого же радар-процессора 9 передают обработанные сигналы по каналу Ethernet в коммутатор 29, откуда по каналу Ethernet выдают сигналы в вычислительный модуль РЛС 11. В вычислительном модуле РЛС 11 преобразуют полученные сигналы в формат телевизионного изображения и передают полученную картинку на видеомонитор РЛС 18. Кроме того, в вычислительном модуле РЛС 11 хранят и обрабатывают информацию электронных карт, а также обрабатывают информацию, полученную от приемника АИС 16, интегрируют ее с радиолокационным изображением и выдают на видеомонитор РЛС 18.
Используя приемник навигационной системы GPS/GLONASS 17, определяют собственное местоположение комплекса, затем передают информацию в виде координат в вычислительный модуль РЛС 11, с помощью которого выводят их на экране видеомонитора РЛС 18, а также вычисляют относительное местоположение комплекса и объектов слежения.
Управление режимами работы РЛС 2 осуществляют при помощи клавиатуры 19.
При помощи ОПУ 20 производят поворот установленных на нем модуля видеокамеры 21 и модуля тепловизора 22 на необходимое положение по азимуту и по углу места по командам оператора при помощи трекбола 27 и джойстика 28, или по данным целеуказания от РЛС 2. Изображение от модуля видеокамеры 21 и модуля тепловизора 22 в виде аналоговых сигналов передают в видеоконвертор 23, при помощи которого производят преобразование сигналов изображения в цифровой вид и передают обработанные сигналы по каналу Ethernet в коммутатор 29. Далее из коммутатора 29 по каналу Ethernet посылают сигналы в вычислительный модуль ОЭС 24. В вычислительном модуле ОЭС 24 полученные сигналы преобразуют в формат телевизионного изображения и выводят полученную картинку на экран видеомонитора ОЭС 26.
С датчика угла наклона 25 получают данные об угле наклона транспортного средства 1 в двух плоскостях и передают в вычислительный модуль ОЭС 24. На основании этих данных при помощи вычислительного модуля ОЭС 24 определяют угол наклона ОПУ 20, необходимый для того, чтобы линия визирования модуля видеокамеры 21 и модуля тепловизора 22 оставалась на уровне горизонта при наведении в режиме целеуказания от РЛС 2. Управление движением ОПУ 20 осуществляют при помощи того же вычислительного модуля ОЭС 24 путем передачи соответствующих команд в ОПУ 20 через коммутатор 29 по каналу Ethernet.
Управление режимами работы ОЭС 3 осуществляют при помощи трекбола 27 и джойстика 28.
При помощи вычислительного модуля 24 обеспечивают выполнение следующих функций:
- передачу информации, находящейся в поле зрения модуля видеокамеры 21 или модуля тепловизора 22 для отображения на видеомониторе ОЭС 26;
- осуществление режима сканирования по программируемой оператором траектории;
- создание панорам местности (до 15 точек) с возможностью быстрого перевода поля зрения модуля видеокамеры 21 или модуля тепловизора 22 в нужные точки панорамы;
- документирование видео и тепловизионной информации в виде отдельных кадров или видеоролика с возможностью последующего просмотра;
- функционирование режима «детектора движения» во всем поле зрения или же в выбранных оператором «окнах» с автоматическим документированием только движущихся целей;
- функционирование режима автоматического вывода на экран изображения с максимальным увеличением на объект, зарегистрированный детектором движения;
- автоматический вывод звуковых или голосовых сигналов о наличии в зоне обзора движущихся целей.
Коммутатор 29 имеет возможность передачи радиолокационной и видеоинформации по каналу Ethernet внешним потребителям.
Данные, полученные пеленгатором спутниковых систем связи 35, передают в вычислительный модуль РЛС 11, а затем отображают на экране видеомонитора РЛС 18. Используя эти данные, оператор имеет возможность пеленгования спутниковых систем связи Thuraya, InmarSAT, Iridium. Дальность пеленгования не менее 15 километров, точность определения координат абонента по системе GPS - не более 30 метров.
При необходимости скрытного движения транспортного средства 1 в ночное время используют систему ночного вождения 5. При этом изображение местности перед транспортным средством 1 получают в инфракрасном диапазоне при помощи неохлаждаемого тепловизора 30, установленного в переднем бампере транспортного средства 1 и передают его на видеомонитор 31, установленный в поле зрения водителя. Это позволяет избежать применения внешних осветительных приборов.
Автоматическая нрлс с увеличенным необслуживаемым периодом автономной работы
Радиолокационная станция кругового обзора
Наземный транспортный комплекс для обнаружения и распознавания объектов
Устройство для управления аэродромным кондиционером
Автоматическая нрлс с увеличенным необслуживаемым периодом автономной работы
Наземный транспортный комплекс для обнаружения и распознавания объектов
Способ демонтажа крышки парогенератора ядерной энергетической установки

