Результат интеллектуальной деятельности: СПОСОБ ОЦЕНКИ ОШИБОК И КОНТРОЛЯ ДАТЧИКОВ ПЕРВИЧНОЙ ИНФОРМАЦИИ В СОСТАВЕ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В НАЗЕМНЫХ УСЛОВИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к средствам ориентации и навигации объектов, подвижных в тех или иных средах, в частности летательных аппаратов (ЛА), а именно к способам и устройствам для оценки ошибок и контроля датчиков первичной информации в составе бесплатформенной инерциальной навигационной системы (БИНС) в наземных условиях, в частности в условиях лаборатории.
Известен способ оценки ошибок датчиков первичной информации в составе БИНС в наземных условиях [1], заключающийся в последовательном выполнении трех видов тестов:
1) статический тест акселерометров - при установке блока БИНС последовательно в 6 положений с направлением осей чувствительности акселерометров вверх и вниз, что позволяет оценить смещения нулей акселерометров, погрешности их масштабных коэффициентов и неортогональностей осей чувствительности;
2) статический тест датчиков угловых скоростей (ДУС), позволяющий в условиях статического теста акселерометров определить погрешности нулевых сигналов ДУС, в том числе зависящие от ускорения;
3) угловой тест ДУС, заключающийся в последовательной установке блока БИНС на одноосную поворотную платформу вверх (или вниз) соответствующими осями чувствительности ДУС, придании вращения поворотной платформе, позволяющий определить погрешности масштабных коэффициентов ДУС и неортогональности их осей чувствительности.
Недостатками данного способа являются:
- необходимость использования значительного количества технологического оборудования и оснастки: кронштейн для установки БИНС, высокопрецизионная плоскопараллельная горизонтированная плита для выполнения статических тестов акселерометров и ДУС, поворотная установка;
- наличие большого числа «ручных» операций (перестановка кронштейна с БИНС в 6 положений, последовательная установка и закрепление кронштейна с БИНС в 3-х положениях на поворотной платформе);
- длительное время проведения проверок;
- необходимость введения допускового контроля по всем параметрам погрешностей инерциальных датчиков первичной информации (ДНИ) БИНС (3 параметра смещения нулевых сигналов акселерометров, 6 параметров погрешностей масштабного коэффициента акселерометров - на положительном и отрицательном воздействии, 6 параметров неортогональностей измерительных осей акселерометров, такое же, или большее, количество параметров ошибок ДУС - итого не менее 30 параметров погрешностей).
Особенностью описанного способа является оценка конкретных ошибок датчиков первичной информации (всех 30-ти или большего количества составляющих, определяемых математической моделью ДНИ, применяемых в составе БИНС).
Между тем существуют интегральные способы контроля и оценки ошибок ДНИ БИНС, заключающиеся в использовании функциональной (алгоритмической) зависимости между ошибками ДНИ и итоговыми ошибками БИНС счисления навигационных параметров (например, координат местоположения).
Известен способ контроля, т.е. оценки ошибок ДНИ БИНС, в условиях неподвижного основания [2], заключающийся в начальной выставке инерциальной системы на неподвижном основании на основе статической информации, т.е. при нулевых значениях проекций скорости и углов курса, тангажа, крена и текущих значениях абсолютных географических координат местоположения. Затем происходит замкнутый итерационный процесс определения текущей ориентации связанных осей БИНС относительно нормальной земной системы координат. При отсутствии накопления ошибок по скорости в процессе функционирования БИНС начальная выставка может считаться завершенной.
После окончания начальной выставки БИНС переводится в режим автономной работы, в ходе которой оцениваются погрешности БИНС, определяемые главным образом инструментальными погрешностями инерциальных датчиков.
И, наконец, производится допусковый контроль ошибок счисления БИНС итоговых навигационных параметров (например, координат местоположения), определяющий ее пригодность для эксплуатации.
Недостатками данного способа являются недостаточная достоверность определения ошибок ДПИ контролируемой БИНС и малая глубина контроля БИНС, обусловленная тем, что при проведении проверок отсутствуют внешние воздействия на датчики первичной информации. В случае отсутствия внешних воздействий большая часть инструментальных погрешностей ДНИ не приводит к итоговому нарастанию погрешностей счисления навигационной информации БИНС (например, координат местоположения), что может привести к принятию ложного решения о пригодности БИНС к эксплуатации.
Известный способ в лабораторных условиях может реализовываться на каком-либо неподвижном основании или расположенной на нем платформе, что не позволяет контролировать ошибки БИНС в иных условиях, кроме стационарных.
Задачами, на решение которых направлены данные изобретения, являются повышение достоверности определения ошибок БИНС, обусловленных погрешностями ДНИ, и увеличение глубины ее контроля.
Поставленные задачи решаются за счет того, что в способ оценки ошибок и контроля ДЛИ в составе БИНС в наземных условиях, заключающийся в установке БИНС на платформе с основанием, ее начальной выставке, переводе БИНС в режим автономной работы, по окончании которого производится допусковый контроль ошибок БИНС, согласно изобретению вводятся операции двух последовательных поворотов БИНС на определенные углы по крену и тангажу, производящиеся после перевода БИНС в режим автономной работы.
В устройстве для осуществления заявленного способа, содержащем основание и расположенную на нем платформу для установки БИНС, согласно изобретению основание выполнено в виде поворотной рамы, ось вращения которой перпендикулярна оси вращения поворотной платформы, при этом на осях вращения основания и платформы установлены исполнительные приводы для задания углов поворота контролируемой БИНС по крену и тангажу.
К существенным отличиям заявленного способа по сравнению с прототипом относится то, что оценка ошибок БИНС производится не в стационарных условиях, а при последовательных поворотах БИНС на определенные углы по крену и тангажу, что безусловно позволяет повысить достоверность оценок и увеличить глубину контроля за счет введения динамических воздействий на все инерциальные датчики первичной информации БИНС.
Существенными отличиями устройства для реализации способа является то, что установленная в нем БИНС благодаря особенностям конструкции может поворачиваться на определенные углы, что позволяет произвести достоверную оценку ошибок БИНС, не прибегая к помощи громоздкого и дорогостоящего двух- или трехстепенного динамического поворотного стенда.
Заявленный способ реализуется следующим образом.
Подача возмущающих воздействий на все датчики первичной информации может быть обеспечена путем выполнения двух последовательных поворотов БИНС по перпендикулярным осям - по крену и тангажу. При этом, с точки зрения минимизации операций, эти повороты должны выполняться в строгой последовательности:
- первый поворот - по крену на некоторый определенный угол - обеспечивает подачу воздействий на ДУС канала X и акселерометры каналов Y, Z;
- второй поворот - по тангажу на некоторый определенный угол - обеспечивает подачу воздействий на ДУСы каналов Y, Z и акселерометр канала X.
Дифференциальные уравнения, характеризующие накопление ошибок БИНС, широко известны и называются уравнениями ошибок. В линейной области (когда ошибки сравнительно невелики) уравнения ошибок могут быть представлены в виде следующей системы:
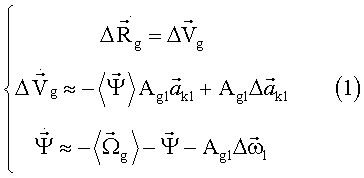
где  ,
,  ,
,  - векторы ошибок инерциальной системы по местоположению, скорости и ориентации; Ag1 - матрица ориентации связанных осей относительно нормальной земной системы координат;
- векторы ошибок инерциальной системы по местоположению, скорости и ориентации; Ag1 - матрица ориентации связанных осей относительно нормальной земной системы координат;
 ,
,  - ошибки измерения ускорения и угловой скорости (инструментальные погрешности акселерометров и ДУС);
- ошибки измерения ускорения и угловой скорости (инструментальные погрешности акселерометров и ДУС);  - вектор угловой скорости вращения Земли; 〈…〉 - кососимметрическая матрица от соответствующего вектора.
- вектор угловой скорости вращения Земли; 〈…〉 - кососимметрическая матрица от соответствующего вектора.
В условиях неподвижного основания (при отсутствии активных ускорений и угловых движений) приведенная система уравнений может быть упрощена и в скалярном виде может быть записана:
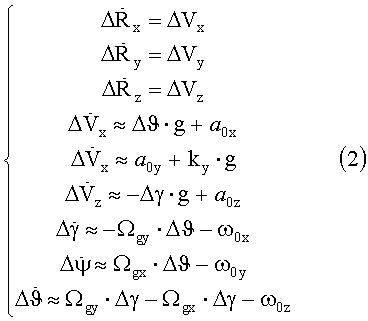
где  - вектор нулевых сигналов акселерометров;
- вектор нулевых сигналов акселерометров;
 ;
;
 - вектор нулевых сигналов ДУС;
- вектор нулевых сигналов ДУС;
g - ускорение силы тяжести;
 - вектор ошибок по ориентации имеет компоненты ошибок по углам курса Δψ, тангажа Δϑ и крена Δγ.
- вектор ошибок по ориентации имеет компоненты ошибок по углам курса Δψ, тангажа Δϑ и крена Δγ.
Анализ приведенной системы уравнений ошибок ведет к следствиям, которые характеризуют функционирование инерциальной системы в режиме неподвижного основания:
1. Независимо от погрешностей задания исходных данных и независимо от качества и точности функционирования инерциальных датчиков начальная выставка БИНС будет безусловно выполнена, при этом изменение ошибок по скорости в горизонтальных каналах будет отсутствовать, а в вертикальном канале будет соответствовать эквивалентным ошибкам вертикального акселерометра  ;
;  , изменение ошибок по ориентации будет отсутствовать, так как уравновешено угловой скоростью коррекции, соответствующей оцененным эквивалентным дрейфам ДУС
, изменение ошибок по ориентации будет отсутствовать, так как уравновешено угловой скоростью коррекции, соответствующей оцененным эквивалентным дрейфам ДУС  ,
,  ,
, 



2. После перехода БИНС в режим автономной работы нарастание ошибок по ориентации и горизонтальным проекциям скорости и координат будет минимальным (определяется нестабильностью характеристик инерциальных датчиков).
 ,
,
 ,
,
 ,
,
а в вертикальном канале
 ,
,
 .
.
Таким образом, при проведении выставки на неподвижном основании и последующим переходом БИНС в режим автономной работы нарастание ошибок возможно только в вертикальном канале (который во многих случаях не контролируется), в то время как в горизонтальных каналах нарастание ошибок будет минимальным.
В случае осуществления двух последовательных поворотов БИНС в режиме автономной работы (после завершения начальной выставки) подаются воздействия на все ДНИ, что приводит к различным условиям накопления ошибок БИНС в соответствии с (2) в режимах начальной выставки и автономной работы.
Различие характера накоплений ошибок БИНС в режимах начальной выставки и автономной работы приведет в итоге к накоплению ошибок счисления навигационных параметров БИНС (например, координат местоположения), что может быть зарегистрировано допусковым контролем.
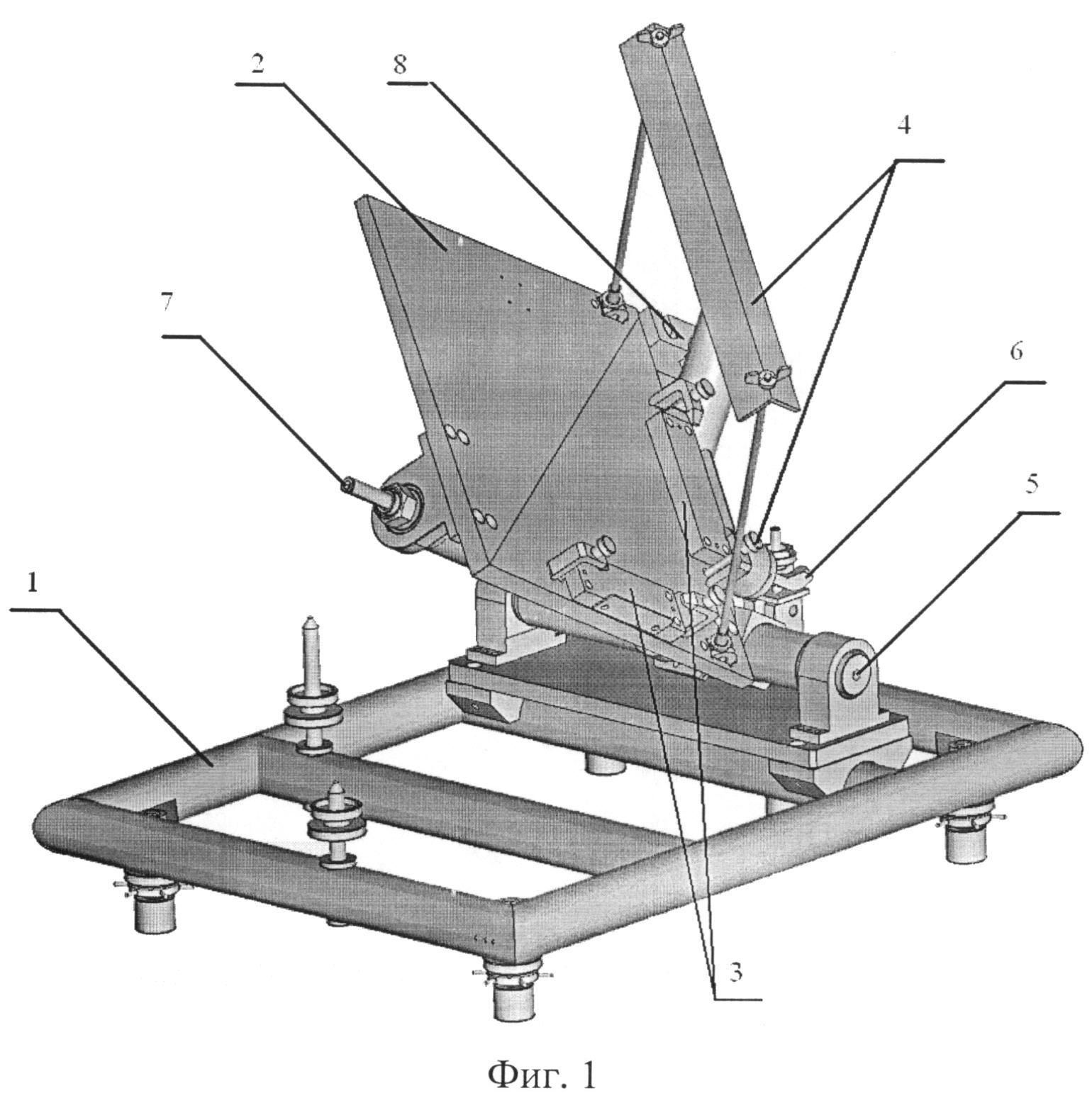
На чертеже фиг.1 показан общий вид поворотного устройства для реализации заявленного способа.
Поворотное устройство состоит из основания 1, выполненного в виде поворотной рамы, на котором расположена платформа 2 для установки контролируемой БИНС. Платформа 2 содержит упоры 3 и крепления 4, обеспечивающие жесткое закрепление контролируемой БИНС на платформе 2. На основании 1 закреплена ось 5 вращения по углу тангажа, обеспечивающая поворот платформы 2 и ее фиксацию с некоторым конструктивно определенным значением угла с помощью упоров 6. Ось 5 в свою очередь соединена с осью 7, расположенной перпендикулярно к оси 5 и обеспечивающей поворот платформы 2 с установленной на ней БИНС по углу крена и ее фиксацию с некоторым конструктивно определенным значением угла с помощью упоров 8.
Устройство работает следующим образом. Контролируемая БИНС устанавливается на платформе 2 в упорах 3 в положении, соответствующем нулевым начальным углам крена и тангажа, и закрепляется с использованием креплений 4. После ее начальной выставки она переводится в режим автономной работы и затем поворачивается путем вращения ручки привода оси 7 на определенный угол по крену и закрепляется с использованием креплений 8, затем поворачивается путем вращения ручки привода оси 5 на определенный угол по тангажу и закрепляется с использованием креплений 6. Через заданное время автономной работы производится контроль счисления БИНС итоговых навигационных параметров (например, координат местоположения). В случае положительного завершения допускового контроля БИНС считается пригодной к эксплуатации, в противном случае принимается решение о несоответствии ошибок инерциальных ДЛИ БИНС заданным требованиям и производится дополнительная калибровка ДПИ БИНС.
Пример реализации заявленного способа приведен ниже. Контролируемая БИНС устанавливается на платформе 2 в положении, соответствующем нулевым начальным углам крена и тангажа. После ее начальной выставки в течение заданного времени она переводится в режим автономной работы и затем поворачивается путем вращения ручки привода оси 7 на угол, например, 45° по крену, затем поворачивается путем вращения ручки привода оси 5 на угол, например, 30° по тангажу.
Оценку погрешностей счисления координат БИНС проведем аналитически, при этом рассмотрим 2 случая отказных ситуаций:
- отказ любого из датчиков в составе БИНС;
- превышение заявленных характеристик погрешностей датчиков. Аналитические оценки базируются на анализе уравнений ошибок инерциальной системы (2).
Отказ акселерометра канала X приведет при изменении угла тангажа на 30° к появлению ошибки по ускорению, эквивалентной появлению нулевого сигнала величиной  , которая в свою очередь приведет к ошибке счисления координат
, которая в свою очередь приведет к ошибке счисления координат  . При времени автономной работы t=250 секунд ошибка по координате составит ~ 153 км.
. При времени автономной работы t=250 секунд ошибка по координате составит ~ 153 км.
Отказ акселерометра канала Z приведет при изменении угла крена на 45° к появлению ошибки по ускорению, эквивалентной появлению нулевого сигнала величиной  , которая в свою очередь приведет к ошибке счисления координат
, которая в свою очередь приведет к ошибке счисления координат  . При времени автономной работы t=250 секунд ошибка по координате соответствует ~ 217 км. К аналогичной по величине ошибке приведет отказ акселерометра канала Y.
. При времени автономной работы t=250 секунд ошибка по координате соответствует ~ 217 км. К аналогичной по величине ошибке приведет отказ акселерометра канала Y.
Отказ ДУС канала Х приведет при изменении угла крена на 45° к появлению ошибки по крену Δγ, которая (в соответствии с приведенной выше системой) вызовет ошибку по ускорению величиной  , которая в свою очередь приведет к ошибке
, которая в свою очередь приведет к ошибке
счисления координат в канале Z  . При времени автономной работы t=250 секунд ошибка по координате составит ~ 217 км. Отказ ДУС канала Y или Z приведет при изменении угла тангажа на 30° к появлению ошибки по ускорению величиной
. При времени автономной работы t=250 секунд ошибка по координате составит ~ 217 км. Отказ ДУС канала Y или Z приведет при изменении угла тангажа на 30° к появлению ошибки по ускорению величиной  , которая в свою очередь приведет к ошибке счисления координат в канале
, которая в свою очередь приведет к ошибке счисления координат в канале  . При времени автономной работы t=250 секунд ошибка по координате составит ~ 108 км.
. При времени автономной работы t=250 секунд ошибка по координате составит ~ 108 км.
Таким образом, отказ любого из датчиков приведет при наличии двух последовательных угловых поворотов в режиме автономного полета к появлению ошибок счисления координат, несовместимых с требованиями ТЗ на систему, что может быть зарегистрировано допусковым контролем.
Проведем анализ отказа, проявляющегося в изменении характеристик датчиков первичной информации. При этом при проведении аналитических оценок отказом, несовместимым с понятием штатного функционирования датчика, будем считать 10-ти кратное превышение ошибки своего допустимого значения. Типовые значения характеристик датчиков, применяемых в БИНС, примем:
- нескомпенсированное значение нулевого сигнала акселерометра - 0.003 g;
- погрешность масштабного коэффициента акселерометра - 0.3%;
- погрешность масштабного коэффициента ДУС - 0.3%. Погрешности нулевого сигнала ДУС (дрейф) не рассматриваются, так как величина дрейфа полностью оценивается в режиме начальной выставки на неподвижном основании и компенсируется в режиме автономной работы. Изменение систематической составляющей дрейфа ДУС в процессе эксплуатации в случае его компенсации не оказывает влияния на рост ошибок счисления координат. При этом увеличение нестабильности дрейфа в запуске в условиях неподвижного основания автоматически приведет к росту погрешностей и непрохождению допускового контроля. Также не рассматриваются погрешности вертикального акселерометра, так как было указано, что эти погрешности напрямую приводят к ошибкам счисления высоты.
С учетом 10-ти кратного превышения проведем аналитический анализ погрешностей БИНС, последовательно рассматривая:
- нескомпенсированное значение нулевого сигнала акселерометра - 0.03 g;
- погрешность масштабного коэффициента акселерометров - 3.0%;
- погрешность масштабного коэффициента ДУС - 3.0%. Нулевой сигнал акселерометра канала Х оценивается в процессе начальной выставки в виде эквивалентной ошибки по ориентации величиной  При изменении угла тангажа на 30° происходит перепроектирование нулевого сигнала с появлением ошибки по ускорению Δa
x,z=0.03g·sin30°≈0.015 g, что приведет к ошибке счисления координат
При изменении угла тангажа на 30° происходит перепроектирование нулевого сигнала с появлением ошибки по ускорению Δa
x,z=0.03g·sin30°≈0.015 g, что приведет к ошибке счисления координат  . Величина ошибки за 250 секунд - 4600 метров. Аналогичную по величине ошибку повлечет за собой превышение нулевого сигнала акселерометра по каналу Z.
. Величина ошибки за 250 секунд - 4600 метров. Аналогичную по величине ошибку повлечет за собой превышение нулевого сигнала акселерометра по каналу Z.
Погрешность масштабного коэффициента акселерометра канала Z приведет при изменении угла крена на 45° к ошибке определения ускорения Δa z=3%-sin45°·g≈0.02 g, и, как следствие, к погрешности счисления координат, эквивалентной наличию нулевых сигналов в каналах X, Z, за 250 секунд - 6500 метров.
Погрешность масштабного коэффициента акселерометра канала Х приведет при изменении угла тангажа на 30° к ошибке определения ускорения Δa x=3%-sin30°·g≈0.015 g, и, как следствие, к погрешности счисления координат за 250 секунд - 4600 метров.
Погрешность масштабного коэффициента ДУС канала Х приведет при изменении угла крена на 45° к ошибке определения ускорения Δa=sin(3%-45°)·g≈0.024 g, и, как следствие, к погрешности счисления координат за 250 секунд - 7200 метров.
Погрешность масштабного коэффициента ДУС каналов Y, Z приведет при изменении угла крена на 45° и угла тангажа на 30° к ошибке определения ускорения Δa x,z=sin45°-sin(3%-30°)·g≈0.011 g, и, как следствие, к погрешности счисления координат за 250 секунд - 3500 метров.
Таким образом, как показывают аналитические оценки, применение предложенной последовательности поворотов изделия в режиме автономной работы позволяет выявить не только отказы датчиков, но и их нештатное функционирование, путем превышения допустимой погрешности счисления координат.
Таким образом, введение новых действий и операций в виде последовательных поворотов контролируемой БИНС на углы крена и тангажа после ее начальной выставки и перевода в режим автономной работы позволяет повысить достоверность оценок и увеличить глубину контроля за счет введения динамических воздействий на все инерциальные датчики первичной информации БИНС.
Источники информации
1. Titterton D.H., Weston J.L. Strapdown inertial navigation technology / Institution of Electrical Engineers. UK, 2004. p.256.
2. Система бортового управления СБУ-08. Технические условия ИСМЯ.794219.014 ТУ. Техническая документация ОАО «АНПП «ТЕМП-АВИА», г.Арзамас, 2007 г., стр.26 (прототип).
Интегрированная система резервных приборов
Чувствительный элемент углового акселерометра
Способ диффузионной сварки многослойного пакета из стекла и монокристаллического кремния
Способ начальной азимутальной ориентации непрерывного гироскопического инклинометра и устройство для его осуществления
Магнитная система динамически настраиваемого гироскопа
Система и способ определения пространственного положения и курса летательного аппарата
Способ определения зенитного угла и азимута скважины и гироскопический инклинометр
Радиоэлектронный блок
Способ балансировки металлического зубчатого резонатора волнового твердотельного гироскопа
Магниторезистивный датчик перемещений
Интегрированная система резервных приборов
Чувствительный элемент углового акселерометра
Способ диффузионной сварки многослойного пакета из стекла и монокристаллического кремния
Способ изготовления упругого подвеса динамически настраиваемого гироскопа
Устройство для обнаружения короткозамкнутых витков в электрических катушках
Способ начальной азимутальной ориентации непрерывного гироскопического инклинометра и устройство для его осуществления
Магнитная система динамически настраиваемого гироскопа
Система и способ определения пространственного положения и курса летательного аппарата
Способ определения зенитного угла и азимута скважины и гироскопический инклинометр
Радиоэлектронный блок

