Результат интеллектуальной деятельности: ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ЗАГЛУБЛЕННОГО ИСТОЧНИКА ЗВУКА И ИЗМЕРЕНИЯ ЕГО КООРДИНАТ В МЕЛКОМ МОРЕ
Вид РИД
Изобретение
Изобретение относится к гидроакустике и может быть использовано для обнаружения движущегося источника звука, измерения координат источника звуковых волн в мелком море в пассивном режиме с помощью акустических приемников, установленных на морском дне, координаты которых и угловое положение считаются известными.
Известен способ обнаружения шумящих объектов (заявка на изобретение №95113277, МПК G01S 15/00, 1998 г.), включающий прием сигналов шумоизлучения двумя разнесенными в пространстве антеннами, спектральный анализ принятых сигналов, измерение взаимного спектра между сигналами, принятыми этими антеннами, измерение автокорреляционной функции, нормирование измеренной функции к максимуму, измерение основного лепестка нормированной функции при ее уровнях от 0.1 до 0.8 от максимального значения с шагом 0.1, вычисление отношения предыдущего измерения к последующему на каждом шаге, сравнение полученных результатов с расчетными и при отличии измеренных значений от расчетных принятие решения о наличии нескольких целей на одном направлении, причем о числе целей судят по числу шагов, имеющих это отличие.
Недостатком данного способа обнаружения является малая дальность обнаружения при работе в мелком море. Кроме того, данный способ обнаружения принципиально не может быть использован для определения горизонта источника звука, что представляет определенный практический интерес. При работе обнаружителя в мелком море в присутствии помехи сама задача обнаружения источника звука и поддержания с ним акустического контакта представляет серьезную проблему, которая решается только при достаточно большом отношении сигнал-помеха и при весьма ограниченной дальности обнаружения источника сигнала.
Известно устройство (патент РФ на полезную модель №82972, МПК, H04B 10/00, 2008 г.), в котором для устранения этих недостатков используется многоканальный цифровой комбинированный гидроакустический комплекс, содержащий N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, а также систему сбора, обработки и отображения информации, содержащую блок сбора обработки и отображения информации, вход которого соединен с выходом оптического ресивера, устройство доступа к цифровым сетям передачи данных, вход которого соединен с выходом блока сбора обработки и отображения информации, и формирователь диаграммы направленности, вход и выход которого соединены со входом и выходом блока сбора обработки и отображения информации. В каждом комбинированном приемнике этого устройства измеряются компоненты вектора интенсивности Ix, Iy, Iz в локальной ортогональной системе координат, связанной с акустическим комбинированным приемником, а направление на источник звука определяется по формуле

где φ - азимутальный угол в горизонтальной плоскости, отсчитываемый от оси X локальной системы координат, связанной с акустическим комбинированным приемником. При необходимости результаты измерений углового положения источника звука в локальной системе координат пересчитываются в пеленг.
Аналогичным образом можно определить угол места, если акустический комбинированный приемник расположен в ближней зоне источника звука

В этом устройстве N акустических комбинированных приемников и программный модуль для формирования диаграммы направленности в режиме реального времени образуют гидроакустическую антенну, которая обладает повышенной помехоустойчивостью и малой погрешностью измерения координат источник звука по сравнению с аналогом [1]. При определенной конфигурации элементов антенны дальность обнаружения источника звука может быть увеличена, а погрешность измерения координат источника может быть уменьшена при работе измерительного комплекса в мелком море. Данное устройство является наиболее близким к заявленному изобретению.
Недостатком этого устройства является невозможность значительного увеличения числа акустических комбинированных приемников и апертуры антенны из-за значительных дисперсионных искажений акустического сигнала при его распространении в мелком море. Вследствие таких искажений алгоритмы фазирования сигналов, принятых отдельными элементами антенны, которые положены в основу функционирования формирователя диаграммы направленности, и сами алгоритмы определением азимутального угла на источник звука по формуле (1) и угла места по формуле (2) становятся неэффективными. В результате дальность обнаружения измерительной антенны не увеличивается, а погрешность измерения пеленга не уменьшается при увеличении апертуры антенны. Кроме того, недостатком этого устройства является большая погрешность измерения горизонта источника при работе измерительного комплекса в мелком море и малая дальность обнаружения источника звука.
В основу настоящего изобретения поставлена задача увеличения дальности обнаружения источника звука, а также уменьшения погрешности измерения координат источника при работе измерительного комплекса в мелком море путем увеличения апертуры его измерительной системы и использования корреляционных свойств звукового поля движущегося источника звука. Для достижения поставленной цели предлагается использование корреляционных свойств звукового поля по отношению к вертикальной компоненте вектора интенсивности, которая генерируется комплексным угловым спектром движущегося источника. В соответствии с результатами работы (Щуров В.А., Кулешов В.П., Ткаченко Е.С. Вихри акустической интенсивности в мелком море // Техническая акустика. 2010. №12. ) вертикальная компонента вектора интенсивности обладает явно выраженной периодической структурой в звуковом поле, создаваемом движущимся источником звука в мелком море на расстояниях, существенно превышающих размер ближней зоны rб=Н2/λ (Н - глубина моря, λ - длина волны на средней частоте рабочего диапазона частот). Это означает высокую коррелированность звуковых полей по отношению к вертикальной компоненте вектора интенсивности, а также простую связь горизонта источника с измеряемыми параметрами этой величины. Кроме того, уровень вертикальной составляющей вектора интенсивности в шумах судоходства убывает экспоненциально быстро с глубиной, поэтому шумы судоходства оказывают минимальное влияние на измерение этой компоненты звукового поля в случае, если источник звука, подлежащий обнаружению, является заглубленным.
Для реализации поставленной задачи в гидроакустическом измерительном комплексе, содержащем N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и отображения информации, содержащую блок сбора, обработки и отображения информации, вход которого соединен с выходом оптического ресивера, и устройство доступа к цифровым сетям передачи данных, вход которого соединен с выходом блока сбора, обработки и передачи информации, посредством N акустических комбинированных приемников образуются две донные вертикально ориентированные эквидистантные антенны, в каждой из которых число элементов равно N/2, а локальные координатные системы всех акустических комбинированных приемников совмещены. При этом расстояние между вертикальными антеннами 1>λн, где λн - длина волны на нижней частоте рабочего диапазона шумоизлучения источника звука, расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников в каждой антенне N/2=h12/Δz, h12=z1-z2, z1, z2 нижний и верхний горизонты вероятного нахождения источника звука, образующие коридор обнаружения.
Кроме того, в систему сбора, обработки и отображения информации дополнительно введены N-канальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, блок определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности, N-канальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, N-канальный блок вычисления азимутальных углов φ1n, φ2n, вход которого соединен с первым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, блок вычисления усредненных азимутальных углов, первый вход которого соединен с выходом N-канального блока вычисления азимутальных углов, а второй вход соединен со вторым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, блок вычисления горизонтальных координат источника звука, вход которого соединен с выходом блока вычисления усредненных азимутальных углов, причем усредненные азимутальные углы определяется формулами
 ,
,

где φn, Ix,1n, Iy,1n - азимутальный угол и компоненты вектора интенсивности, относящиеся к n-ому акустическому комбинированному приемнику, индексы 1, 2 относятся к двум вертикально ориентированным эквидистантным антеннам, горизонтальные координаты источника звука в локальной системе координат (x, y), совмещенной с локальной системой координат акустических комбинированных приемников, определяются формулами

а за горизонт источника принимается горизонт акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вектора интенсивности. Информация с выхода блока вычисления горизонтальных координат источника звука и блока определения максимума вертикальной компоненты вектора интенсивности поступает на первый и второй входы устройства доступа к цифровым сетям передачи данных.
Кроме того, для увеличения дальности обнаружения движущегося источника звука и поддержания с ним акустического контакта в систему сбора, обработки и отображения информации дополнительно введены N/2-канальный вычислитель взаимного спектра, входы которого соединены с выходами N-канального блока вычисления вертикальной компоненты вектора интенсивности, N/2-канальный вычислитель взаимной корреляционной функции, входы которого соединены с выходами N/2-канального вычислителя взаимного спектра, сумматор, вход которого соединен с выходами N/2-канального вычислителя взаимной корреляционной функции, блок измерения максимума взаимной корреляционной функции, вход которого соединен с выходом сумматора, блок нормирования взаимной корреляционной функции, входы которого соединены с выходами сумматора и блока измерения максимума взаимной корреляционной функции, блок вычисления ширины основного лепестка нормированной взаимной корреляционной функции на уровнях от 0.1 до 0.8 от максимального значения с шагом 0.1, вход которого соединен с выходом блока нормирования взаимной корреляционной функции, вычислитель отношения предыдущего измерения к последующему на каждом шаге, вход которого соединен с выходом блока вычисления ширины основного лепестка нормированной взаимной корреляционной функции на уровнях от 0.1 до 0.8 от максимального значения с шагом 0.1, компаратор, первый вход которого соединен с выходом блока вычислителя отношения предыдущего измерения к последующему, блок задания расчетных значений отношений предыдущего измерения к последующему, выход которого соединен со вторым входом компаратора, блок принятия решения об обнаружении источников звука и их числе, вход которого соединен с выходом компаратора, а выход соединен с третьим входом устройства доступа к цифровым сетям передачи данных.
В предлагаемом комплексе существенными признаками, общими с прототипом, являются:
- N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей;
- телеметрический блок, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером;
- система сброса, обработки и передачи информации, содержащая блок сбора, обработки и передачи информации, и устройство доступа к цифровым сетям передачи данных.
Отличительными существенными признаками являются:
- акустическими комбинированными приемниками образуются две донные вертикально ориентированные эквидистантные антенны, в каждой из которых содержится N/2 комбинированных приемников, расстояние между вертикальными антеннами 1>λн, где λн - длина волны на нижней частоте рабочего диапазона шумоизлучения источника звука, расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников в каждой антенне N/2=h12/Δz, h12=z1-z2, z1, z2 нижний и верхний горизонты вероятного нахождения источника звука, образующие коридор обнаружения;
- N-канальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации;
- блок определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности;
- N-канальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации;
- N-канальный блок вычисления азимутальных углов, вход которого соединен с первым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности;
- блок вычисления усредненных азимутальных углов, первый вход которого соединен с выходом N-канального блока вычисления азимутальных углов, а второй вход соединен со вторым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, а усредненные азимутальные углы определяются формулой
где φп, Ixn, Iyn - азимутальный угол и компоненты вектора интенсивности, относящиеся к n-y акустическому комбинированному приемнику, индексы 1, 2 относятся к двум вертикально ориентированным эквидистантным антеннам;
- блок вычисления горизонтальных координат источника звука, которые определяются по формулам

- вертикальная координата источника звука принимается равной вертикальной координате акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вектора интенсивности;
- N/2 - канальный вычислитель взаимного спектра, входы которого соединены с выходами N-канального блока вычисления вертикальной компоненты вектора интенсивности;
- N/2 - канальный вычислитель взаимной корреляционной функции, входы которого соединены с выходами N/2-канального вычислителя взаимного спектра;
- сумматор, вход которого соединен с выходами N/2-канального вычислителя взаимной корреляционной функции;
- блок измерения максимума взаимной корреляционной функции, вход которого соединен с выходом сумматора;
- блок нормирования взаимной корреляционной функции, входы которого соединены с выходами сумматора и блока измерения максимума взаимной корреляционной функции;
- блок вычисления ширины основного лепестка нормированной взаимной корреляционной функции на уровнях от 0.1 до 0.8 от максимального значения с шагом 0.1, вход которого соединен с выходом блока нормирования взаимной корреляционной функции;
- вычислитель отношения предыдущего измерения к последующему на каждом шаге, вход которого соединен с выходом блока вычисления ширины основного лепестка нормированной взаимной корреляционной функции на уровнях от 0.1 до 0.8 от максимального значения с шагом 0.1;
- компаратор, первый вход которого соединен с выходом блока вычислителя отношения предыдущего измерения к последующему;
- блок задания расчетных значений отношений предыдущего измерения к последующему, выход которого соединен со вторым входом компаратора;
- блок принятия решения об обнаружении источников звука и их числе, вход которого соединен с выходом компаратора, а выход соединен с третьим входом устройства доступа к цифровым сетям передачи данных.
Таким образом, именно такая совокупность существенных признаков заявленного устройства позволяет создать гидроакустический измерительный комплекс для обнаружения движущегося заглубленного источника звука и измерения его координат, уменьшить погрешность измерения и увеличить дальность действия самого комплекса при работе в мелком море.
Новизна предлагаемого устройства заключается в том, что в нем в качестве измерительного комплекса используются две донные вертикально ориентированные эквидистантные антенны, в каждой из которых содержится N/2 комбинированных приемников, расстояние между вертикальными антеннами l>λн, где λн - длина волны на нижней частоте рабочего диапазона шумоизлучения источника звука, расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников в каждой антенне N/2=h12/Δz, h12=z1-z2, z1, z2 нижний и верхний горизонты вероятного нахождения источника звука, образующие коридор обнаружения, а в качестве рабочего сигнала используется вертикальная компонента вектора интенсивности. Именно эта характеристика обладает наибольшей пространственной коррелированностью в звуковом поле в мелком море, в наименьшей степени подвержена влиянию помех судоходства, если источник звука является заглубленным, и имеет причинно-следственную связь с горизонтом источника.
Кроме того, для определения горизонтальных координат источника звука используется возможность определения пеленга на источник звука с помощью одиночного комбинированного приемника и избыточная информация об угловом положении источника звука, позволяющая минимизировать погрешность их определения. Именно эта особенность позволяет существенно уменьшить погрешность измерения и увеличить дальность действия всего устройства.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом.
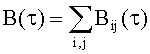
Сущность изобретения поясняется чертежами, где на фиг.1 представлены две донные вертикально ориентированные эквидистантные антенны, разнесенные на базовое расстояние 1, на фиг.2 представлена блок-схема гидроакустического измерительного комплекса.
Заявленный гидроакустический комплекс для обнаружения движущегося заглубленного источника звука и измерения его координат в мелком море содержит N-элементную донную антенну I, телеметрический блок II и систему III сбора, обработки и передачи информации.
Донная антенна I состоит из двух вертикально ориентированных эквидистантных антенн, в каждой из которых содержится N/2 комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей (на чертеже не показаны). Геометрия расположения акустических приемников и источника звука относительно локальной системы координат поясняется фиг.1.
Телеметрический блок II включает: делители напряжения 1, аналого-цифровую преобразующую схему 2, единую схему 3 электронного мультиплексирования, модулятор 4 и оптический излучатель 5, связанный оптической линией 6 связи с оптическим ресивером 7.
Система III сбора, обработки и передачи информации содержит блок 8 сбора, обработки и передачи информации, N-канальный блок 9 вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока 8, блок 10 определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока 9. Та же сигнальная информация с выхода блока 8 сбора, обработки и отображения информации поступает на вход N-канального блока 11 вычисления горизонтальных компонент вектора интенсивности, с выхода которого численные значения горизонтальных компонент вектора интенсивности Ix(ω,ri), Iy(ω,ri) поступают на вход N-канального блока 12 вычисления азимутальных углов. Численные оценки азимутальных углов на источник звука, вычисленные по формуле (1) для каждого из N акустических комбинированных приемников, усредняются в блоке 13 по формуле (3), а усредненные значения азимутальных углов передаются на вход блока 14 вычисления горизонтальных координат источника звука. С выхода блока 14 вычисления горизонтальных координат источника звука информация поступает на второй вход устройства 15 доступа к цифровым сетям передачи данных, а с первым входом последнего соединен выход блока 9.
Кроме того, сигналы с выхода N-канального блока 9 вычисления спектральной плотности вертикального потока мощности поступают на вход N/2-канального блока вычисления взаимного спектра 16, с выхода которого сигналы поступают на вход N/2-канального блока 17 вычисления взаимной корреляционной функции, выход которого соединен со входом сумматора 18, выполняющего суммирование корреляционных функций. Суммарная взаимная корреляционная функция В(τ) с первого выхода сумматора 18 поступает на вход блока 19 измерения максимума взаимной корреляционной функции, выход которого и второй выход сумматора 18 соединены со входом блока 20 нормирования взаимной корреляционной функции. После процедуры нормирования взаимной корреляционной функции сигнал с выхода блока 20 поступает на вход блока 21 вычисления ширины основного лепестка нормированной взаимной корреляционной функции на уровнях от 0.1 до 0.8 от максимального значения с шагом 0.1, выход которого соединен со входом вычислителя отношения предыдущего измерения к последующему на каждом шаге. Численная оценка этого отношения сравнивается в компараторе 22 с расчетными значениями этого отношения, которые формируются в блоке 23 и соответствуют фоновым значениям этих величин в отсутствие источников звука. По результату сравнения измеренных значений с расчетными значениями в блоке 24 принятия решений делается вывод о наличии источников звука и их числе, а информация с выхода блока 24 принятия решений поступает на третий вход устройства 15 доступа к цифровым сетям передачи данных.
Комплекс работает следующим образом.
Звуковая волна, излучаемая источником звука, принимается акустическими комбинированными приемниками, образующими две донные вертикально ориентированные эквидистантные антенны I(I), I(2). Все сигналы с выходов акустических приемников поступают на вход телеметрического блока II, а после прохождения через делители напряжения 1, аналого-цифровую преобразующую схему 2 и единую схему 3 электронного мультиплексирования преобразуются в поток цифровой информации, поступающий через модулятор 4, оптический излучатель 5 и оптическую линию 6 связи на оптический ресивер 7. С выхода оптического ресивера 7 информация поступает в цифровом виде на вход блока 8 сбора, обработки и отображения информации, находящегося в системе III сбора, обработки и отображения информации. В блоке 8 сбора, обработки и отображения информации сигналы вновь разделяются по отдельным каналам звукового давления и компонент вектора колебательной скорости и поступают в N-канальный блок 9 вычисления спектральной плотности  - вертикального потока мощности. В соответствии с результатами работы (Щуров В.А., Кулешов В.П., Ткаченко Е.С. Вихри акустической интенсивности в мелком море // Техническая акустика. 2010. №12. http://www.ejta.org.) именно эти величины обладают наибольшей пространственной коррелированностью, в наименьшей степени подвержены влиянию помех судоходства в случае, если источник звука является заглубленным, и связаны наиболее простой связью с горизонтом источника звука в звуковом поле, формируемом в мелком море. Эти свойства поля спектральной плотности вертикального потока мощности используются при дальнейшей обработке акустической информации. Эта обработка сводится к вычислению вертикальной компоненты вектора интенсивности Iz(ω,ri)=ReSi(ω,ri) в блоке 9 для каждого из N акустических комбинированных приемников с последующим нахождением максимального из этих значений в блоке 10. За горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимальное значение вертикальной компоненты вектора интенсивности, а соответствующая информация поступает на первый вход устройства 15 доступа к цифровым сетям передачи данных. Та же сигнальная информация с выхода блока 8 сбора, обработки и отображения информации поступает на вход N-канального блока 11 вычисления горизонтальных компонент вектора интенсивности, с выхода которого численные значения горизонтальных компонент вектора интенсивности Ix(ω,ri), Iy(ω,ri) поступают на вход N-канального блока 12 вычисления азимутальных углов. Численные оценки азимутальных углов на источник звука, вычисленные по формуле (1) для каждого из N акустических комбинированных приемников, усредняются в блоке 13 по формуле (3), а усредненные значения азимутальных углов передаются на вход блока 14 вычисления горизонтальных координат источника звука. С выхода блока 14 вычисления горизонтальных координат источника звука информация поступает на второй вход устройства 15 доступа к цифровым сетям передачи данных. Сама процедура усреднения отдельных значений азимутального угла позволяет уменьшить случайную составляющую погрешности измерения этой величины.
- вертикального потока мощности. В соответствии с результатами работы (Щуров В.А., Кулешов В.П., Ткаченко Е.С. Вихри акустической интенсивности в мелком море // Техническая акустика. 2010. №12. http://www.ejta.org.) именно эти величины обладают наибольшей пространственной коррелированностью, в наименьшей степени подвержены влиянию помех судоходства в случае, если источник звука является заглубленным, и связаны наиболее простой связью с горизонтом источника звука в звуковом поле, формируемом в мелком море. Эти свойства поля спектральной плотности вертикального потока мощности используются при дальнейшей обработке акустической информации. Эта обработка сводится к вычислению вертикальной компоненты вектора интенсивности Iz(ω,ri)=ReSi(ω,ri) в блоке 9 для каждого из N акустических комбинированных приемников с последующим нахождением максимального из этих значений в блоке 10. За горизонт источника звука принимается горизонт акустического комбинированного приемника, которому соответствует максимальное значение вертикальной компоненты вектора интенсивности, а соответствующая информация поступает на первый вход устройства 15 доступа к цифровым сетям передачи данных. Та же сигнальная информация с выхода блока 8 сбора, обработки и отображения информации поступает на вход N-канального блока 11 вычисления горизонтальных компонент вектора интенсивности, с выхода которого численные значения горизонтальных компонент вектора интенсивности Ix(ω,ri), Iy(ω,ri) поступают на вход N-канального блока 12 вычисления азимутальных углов. Численные оценки азимутальных углов на источник звука, вычисленные по формуле (1) для каждого из N акустических комбинированных приемников, усредняются в блоке 13 по формуле (3), а усредненные значения азимутальных углов передаются на вход блока 14 вычисления горизонтальных координат источника звука. С выхода блока 14 вычисления горизонтальных координат источника звука информация поступает на второй вход устройства 15 доступа к цифровым сетям передачи данных. Сама процедура усреднения отдельных значений азимутального угла позволяет уменьшить случайную составляющую погрешности измерения этой величины.
Кроме того, для увеличения дальности обнаружения движущегося источника звука выполняется попарная взаимно-корреляционная обработка сигналов, принимаемых комбинированными приемниками, принадлежащими двум вертикальным антеннам и находящимися на одном горизонте. С этой целью сигналы с выхода N-канального блока 9 вычисления спектральной плотности  - вертикального потока мощности поступают на вход N/2-канального блока вычисления взаимного спектра 16
- вертикального потока мощности поступают на вход N/2-канального блока вычисления взаимного спектра 16

где ri, rj - координаты комбинированных приемников, принадлежащих двум вертикальным антеннам и находящихся на одном горизонте, с выхода которого сигналы поступают на вход N/2-канального блока 17 вычисления взаимной корреляционной функции
где ωв - верхняя частота рабочего диапазона частот шумоизлучения источника звука, выход которого соединен со входом сумматора 18, выполняющего суммирование корреляционных функций
 .
.
Для дальнейшего решения задачи обнаружения источников звука и определения их числа суммарная взаимная корреляционная функция В(τ) с первого выхода сумматора 18 поступает на вход блока 19 измерения максимума взаимной корреляционной функции, выход которого и второй выход сумматора 18 соединены со входом блока 20 нормирования взаимной корреляционной функции. После процедуры нормирования взаимной корреляционной функции сигнал с выхода блока 20 поступает на вход блока 21 вычисления ширины основного лепестка нормированной взаимной корреляционной функции на уровнях от 0.1 до 0.8 от максимального значения с шагом 0.1, выход которого соединен со входом вычислителя отношения предыдущего измерения к последующему на каждом шаге. Численная оценка этого отношения сравнивается в компараторе 22 с расчетными значениями этого отношения, которые формируются в блоке 23 и соответствуют фоновым значениям этих величин в отсутствие источников звука. По результату сравнения измеренных значений с расчетными значениями в блоке 24 принятия решений делается вывод о наличии источников звука и их числе, а информация с выхода блока 24 принятия решений поступает на третий вход устройства 15 доступа к цифровым сетям передачи данных.
Гидроакустический измерительный комплекс, содержащий N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и передачи информации, содержащую блок сбора, обработки и передачи информации, вход которого соединен с выходом оптического ресивера, и устройство доступа к цифровым сетям передачи данных, отличающийся тем, что в измерительном комплексе посредством N акустических комбинированных приемников образуются две донные вертикально ориентированные эквидистантные антенны, в каждой из которых число элементов равно N/2, локальные координатные системы всех акустических комбинированных приемников совмещены, расстояние между вертикальными антеннами l>λ, где λ - длина волны на нижней частоте рабочего диапазона шумоизлучения источника звука, расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников в каждой антенне N/2-h/Δz, h=z-z, z, z нижний и верхний горизонты вероятного нахождения источника звука, образующие коридор обнаружения, в систему сбора, обработки и отображения информации дополнительно введены N-канальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, блок определения максимума вертикальной компоненты вектора интенсивности, вход которого соединен с выходом N-канального блока вычисления вертикальной компоненты вектора интенсивности, а выход соединен с первым входом устройства доступа к цифровым сетям передачи данных, N-канальный блок вычисления горизонтальных компонент вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, N-канальный блок вычисления азимутальных углов, вход которого соединен с первым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, блок вычисления усредненных азимутальных углов, первый вход которого соединен с выходом N-канального блока вычисления азимутальных углов, второй вход соединен со вторым выходом N-канального блока вычисления горизонтальных компонент вектора интенсивности, блок вычисления горизонтальных координат источника звука, вход которого соединен с выходом блока вычисления усредненных азимутальных углов, а выход соединен со вторым входом устройства доступа к цифровым сетям передачи данных, N/2-канальный вычислитель взаимного спектра, входы которого соединены с выходами N-канального блока вычисления вертикальной компоненты вектора интенсивности, N/2-канальный вычислитель взаимной корреляционной функции, входы которого соединены с выходами N/2-канального вычислителя взаимного спектра, сумматор, вход которого соединен с выходами N/2-канального вычислителя взаимной корреляционной функции, блок измерения максимума взаимной корреляционной функции, вход которого соединен с выходом сумматора, блок нормирования взаимной корреляционной функции, входы которого соединены с выходами сумматора и блока измерения максимума взаимной корреляционной функции, блок вычисления ширины основного лепестка нормированной взаимной корреляционной функции на уровнях от 0.1 до 0.8 от максимального значения с шагом 0.1, вход которого соединен с выходом блока нормирования взаимной корреляционной функции, вычислитель отношения предыдущего измерения к последующему на каждом шаге, вход которого соединен с выходом блока вычисления ширины основного лепестка нормированной взаимной корреляционной функции на уровнях от 0.1 до 0.8 от максимального значения с шагом 0.1, компаратор, первый вход которого соединен с выходом блока вычислителя отношения предыдущего измерения к последующему, блок задания расчетных значений отношений предыдущего измерения к последующему, выход которого соединен со вторым входом компаратора, блок принятия решения об обнаружении источников звука и их числе, вход которого соединен с выходом компаратора, а выход соединен с третьим входом устройства доступа к цифровым сетям передачи данных, причем усредненные азимутальные углы определяются формулами где φ, I, I- азимутальный угол и горизонтальные компоненты вектора интенсивности, относящиеся к n-у акустическому комбинированному приемнику, индексы 1,2 относятся к двум вертикально ориентированным эквидистантным антеннам, горизонтальные координаты источника звука в локальной системе координат (x, y), совмещенной с локальной системой координат акустических комбинированных приемников, определяются формулами ;вертикальная координата источника звука принимается равной вертикальной координате акустического комбинированного приемника, которому соответствует максимум вертикальной компоненты вектора интенсивности, определяемый в блоке определения максимума вертикальной компоненты вектора интенсивности, а в качестве признака обнаружения движущегося источника звука и их числа принимается степень отличия измеренных значений отношения предыдущего измерения к последующему измерению ширины нормированной функции взаимной корреляции на уровнях от 0.1 до 0.8 с шагом 0.1 от расчетных значений этого отношения, вычисленных для фоновой шумовой помехи.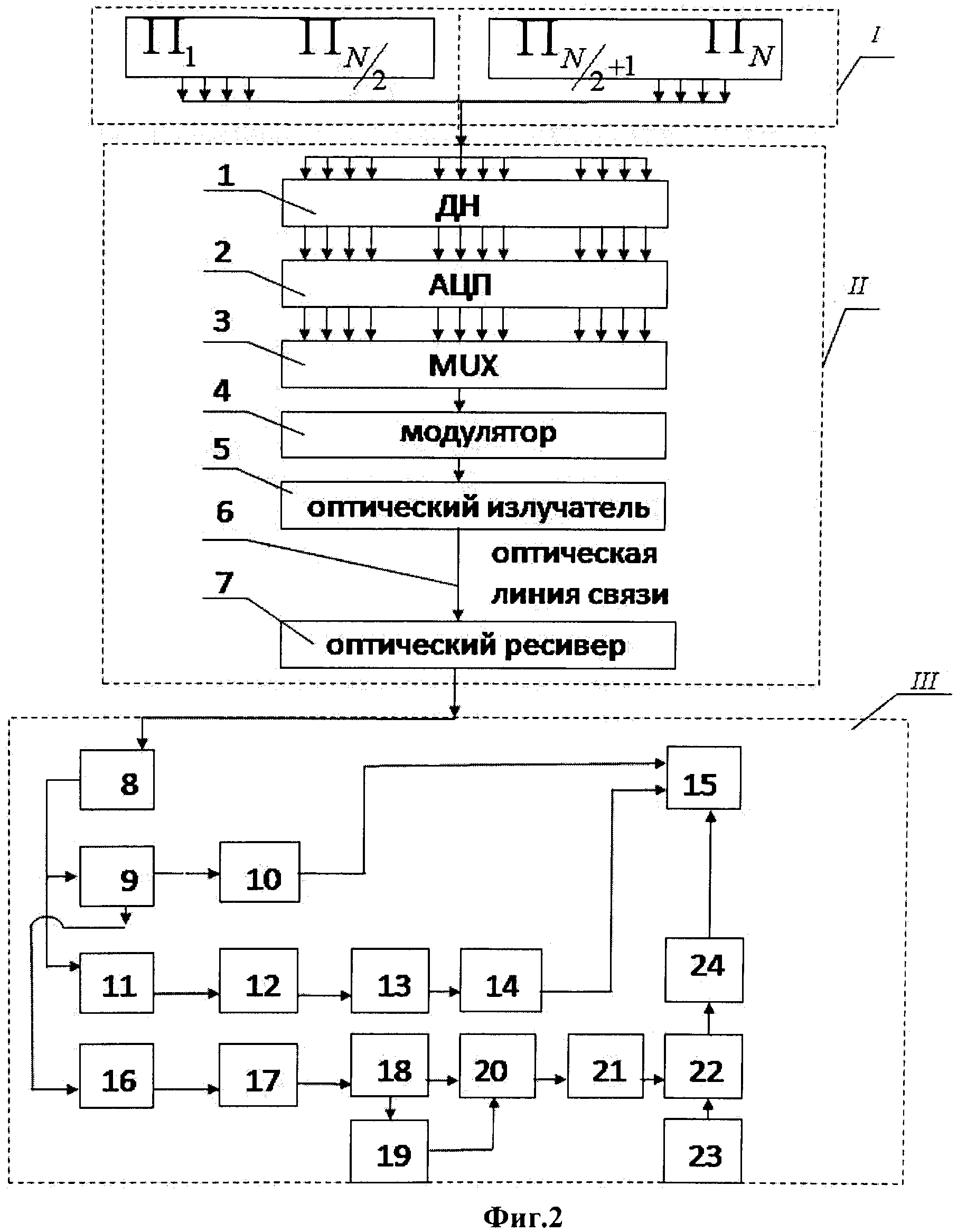


Способ обнаружения подводного источника широкополосного шума
Способ обнаружения шумящих объектов в мелком море
Способ обнаружения шумящих объектов в мелком и глубоком море
Широкополосный гидроакустический пьезопреобразователь
Модуль комплексного антенного устройства радиоэлектронных средств автономного необитаемого подводного аппарата
Способ оценки количества лопастей винта шумящего в море объекта
Способ обнаружения подводного источника широкополосного шума
Гидроакустическая глубоководная антенна
Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот
Устройство для подводного пуска и приема автономного необитаемого подводного аппарата
Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море в инфразвуковом диапазоне частот
Система шумопеленгования гидроакустического комплекса подводной лодки
Способ обнаружения шумящих объектов в мелком море в инфразвуковом диапазоне частот
Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море

