Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ
Вид РИД
Изобретение
Заявляемые объекты объединены одним изобретательским замыслом, относятся к радиотехнике и могут быть использованы в навигационных, пеленгационных, локационных средствах для определения местоположения априорно неизвестного источника радиоизлучения.
Известен способ, реализованный в подвижном радиопеленгаторе, описанном в Пат. РФ №2124222, МПК G01S 13/46, опубл. 27.12.1998 г. Он включает прием сигналов источников радиоизлучений (ИРИ) в заданной полосе частот ΔF перемещающимся в пространстве пеленгатором, измерение первичных пространственно-информационных параметров (ППИП) обнаруженных сигналов с одновременным измерением вторичных параметров: времени измерения ППИП, координат местоположения и ориентации (в азимутальной плоскости) антенной решетки подвижного пеленгатора, преобразование ППИП в пространственные параметры: азимутальный угол θ, θ=0, 1, …, 360° и угол места β, β=0, 1, …, 90°. Способ-аналог позволяет определять параметры криволинейных траекторий перемещения объектов.
Однако аналог обладает недостаточной точностью измерения координат ИРИ в силу того, что в нем реализована двухэтапная обработка результатов измерений. На первом этапе в каждой j-й точке, j=1, 2, …, J, измеряют пространственные параметры θj, βj, которые на втором этапе используют для вычисления местоположения ИРИ. В книге (Кондратьев В.И. и др. Многопозиционные радиотехнические системы / В.С. Кондратьев, А.Ф. Котов, Л.Н. Марков; Под ред. проф. В.В. Цветнова. - М.: Радио и связь, 1989 г., - 264 с.) показано, что системы с двухэтажной обработкой дают худшие результаты, чем при оптимальной одноэтажной обработке (см. там же, стр.13).
Наиболее близким по своей технической сущности к заявляемому является способ определения координат ИРИ, описанный в Пат. РФ №2283505, МПК G01S 13/46, опубл. 10.09.2006 г., бюл. №25. На подготовительном этапе прототип включает вычисление количества N=S/S0 элементарных зон привязки, где S и S0 - соответственно площади зоны контроля и элементарной зоны привязки, присвоение каждой элементарной зоне привязки порядкового номера n, n=1, 2, …, N, определение координат местоположения центров элементарных зон привязки {X,Y}n, расчет и запоминание эталонных значений ППИП на выходах Am,l-ных антенных элементов, где m,l=1, 2, …, M, m≠l, M>2, относительно направлений прихода тестирующего сигнала с дискретностью Δθk, где k=1, 2, …, K; К·Δθk=2π; причем ППИП рассчитывают для средних частот fν=Δf(2V-1)/2, где V=1, 2, …, P; P=ΔF/Δf - число частотных поддиапазонов, Δf∈ΔF ширина частотного поддиапазона, в процессе работы при обнаружении сигнала ИРИ на частоте fν включает измерение ППИП на выходах Am,l-ных антенных элементов (АЭ) решетки с одновременным измерением вторичных параметров: координат местоположения пеленгатора и азимутальной ориентации его антенной решетки, вычисление для каждого направления в горизонтальной плоскости от -π до +π с дискретностью Δθk разности между эталонными и измеренными значениями ППИП, возведение в квадрат полученных разностей и их суммирование, запоминание результатов вычислений Φθ,j(fν) совместно со значениями вторичных параметров, последовательный сдвиг в азимутальной плоскости совокупности сумм Φθ,j(fν) на величину склонения антенной решетки пеленгатора Δθj,скл=iΔθk, где i=1, 2, …, I; I·Δθk=2π; относительно направления на север, запоминание скорректированной последовательности сумм Φθ,j,скл(fν), приведение в соответствие каждой элементарной зоне привязки азимутального угла θj,n, значение которого определяется углом между направлениями: координаты пеленгатора в j-й точке - север и пеленгаторов j-й точке - центр j-ой элементарной зоны привязки, формирование матрицы измерений Rj(θc,n)ν, размерность которой определяется размерами зоны контроля и элементарной зоны привязки, путем записи в ее элементы rj,k,n значений скорректированных сумм Φθ,j,скл(fν), соответствующих углам θj,n, запоминание матрицы Rj(θc,n)ν, сложение элементов rj,k,n матрицы Rj(θc,n)ν, с соответствующими элементами rj-1,k,n предшествующей матрицы Rj-1(θc,n)ν, присвоение суммарной матрице имени Rj(θc,n)ν определение после выполнения J измерений ППИП минимальной суммы Φn(fν) в элементах матрицы измерений RJ(θc,n)ν, принятие координат местоположения центра элементарной зоны привязки {X, Y}n, соответствующие
minΦn(fν) за координаты местоположения обнаруженного ИРИ.
Способ-прототип позволяет повысить точность определения координат ИРИ в сложной сигнально-помеховой обстановке. Положительный эффект достигается благодаря реализации одноэтапной обработки результатов измерений, а следовательно, более полному учету информации о поле сигнала в точках его приема.
Однако прототип обладает недостатками, ограничивающими его применение. К их числу можно отнести:
ограниченную доступность сигналов ИРИ в УКВ-СВЧ-диапазонах частот в силу особенностей их распространения (пеленгаторная антенна находится недалеко от поверхности земли на борту пеленгатора на автомобильной базе);
отсутствие учета углов тангажа и крена относительно горизонта на стоянках и при перемещениях пеленгатора;
при рассмотрении зоны контроля использована плоская модель ее описания, что в большинстве случаев не соответствует действительности.
Известно подвижное устройство определения координат ИРИ по Пат. РФ №2124222, G01S 13/46, опубл. 27.12.1998 г. Аналог содержит устройство формирования пеленгов, вычислитель-формирователь, запоминающее устройство, блок решения системы линейных алгебраических уравнений, блок оценивания, блок определения координат, устройство навигации, генератор синхроимпульсов и устройство отображения с соответствующими связями.
Аналог позволяет определять параметры криволинейных траекторий движения объектов.
Однако устройство-аналог обладает низкой точностью измерения координат ИРИ в силу того, что в нем реализована двухэтапная обработка результатов измерений.
Наиболее близким по своей техникой сущности к заявляемому устройству определения координат источника радиоизлучения является устройство по пат. РФ №2283505 "Способ и устройство определения координат источника радиоизлучения", МПК G01S 13/46, опубл. 10.09.2006 г., бюл. №25.
Устройство-прототип состоит из блока измерения ППИП, радионавигатора, регистра сдвига, первого, второго, третьего и четвертого блоков памяти, первого сумматора, первого и второго вычислителей-формирователей, блока оценивания, первой, второй и третьей установочных шин и выходной шины, блока определения координат, блока индикации, счетчика импульсов, генератора синхроимпульсов, выход которого соединен со входом управления первого запоминающего устройства. Группа информационных входов первого блока памяти соединена с группой информационных выходов первого вычислителя-формирователя, первая группа информационных входов которого соединена с первой группой выходов радионавигатора. Последовательно соединены блок оценивания, блок определения координат и блок индикации, группа информационных выходов которого является выходной шиной устройства определения координат ИРИ. Группа информационных входов блока измерения ППИП является первой установочной шиной устройства определения координат ИРИ, а группа информационных выходов соединена с группой информационных входов регистра сдвига. Вход управления регистра сдвига соединен со вторым выходом радионавигатора. Вторая группа информационных входов первого вычислителя-формирователя является второй установочной шиной устройства определения координат ИРИ, а группа информационных выходов регистра сдвига соединена с группой информационных входов второго блока памяти. Группа адресных входов второго блока памяти соединена с группой информационных выходов первого блока памяти, а группа информационных выходов соединена с группой информационных входов второго вычислителя-формирователя. Группа адресных входов второго вычислителя-формирователя объединена с группой адресных входов первого блока памяти и группой информационных выходов счетчика импульсов. Вторая группа информационных входов первого сумматора объединена с группой информационных входов блока оценивания и группой информационных выходов четвертого блока памяти. Группа информационных входов третьего блока памяти соединена с группой информационных выходов первого сумматора, первая группа информационных входов которого соединена с группой информационных выходов третьего блока памяти. Группа информационных входов третьего блока памяти соединена с группой информационных выходов второго вычислителя-формирователя, вход синхронизации которого объединен с тактовыми входами блока измерения ППИП, первого вычислителя-формирователя, первого сумматора, блока оценивания, входами управления второго, третьего и четвертого блоков памяти, счетным входом счетчика импульсов и выходом генератора тактовых импульсов. Вторая группа информационных входов блока определения координат является третьей установочной шиной устройства определения координат ИРИ.
Устройство-прототип позволяет повысить точность определения координат ИРИ в сложной сигнально-помеховой обстановке. Положительный эффект достигается благодаря реализации одноэтапной обработки результатов измерений, а следовательно, более полному учету информации о поле сигнала в точках его приема.
Однако прототип обладает недостатками, ограничивающими его применение. На стоянках и при перемещении пеленгатора, базирующегося на автомобильном шасси, учитывается лишь склонение его антенной системы. Отсутствие учета углов тангажа и крена относительно горизонта эквивалентно в данной ситуации искажению пространственного описания антенной системы (изменению расстояний между АЭ), что влечет за собой ошибки измерений. Кроме того, в прототипе при рассмотрении зоны контроля используется плоская модель ее описания, что во многих случаях не соответствует действительности. Последнее обстоятельство (наличие пересеченной местности, гор и т.д.) приводит к ошибкам измерений. Дополнительно следует отметить, что наличие городской застройки, пересеченной местности, леса и т.д. существенно ограничивает доступность сигналов ИРИ УКВ-СВЧ-диапазонов для пеленгаторов на автомобильной базе.
Целью заявляемых технических решений является разработка способа и устройства определения координат ИРИ, обеспечивающих повышение доступности сигналов ИРИ УКВ-СВЧ-диапазонов частот и точности их местоопределения благодаря размещению пеленгатора на летно-подъемном средстве (ЛПС), учету полной пространственной его ориентации и оптимизации алгоритма расчета направлений прихода сигнала, учитывающего его угломестную составляющую.
В заявляемом способе поставленная цель достигается тем, что в известном способе определения координат источника радиоизлучения, состоящего в том, что на подготовительном этапе вычисляют количество N=S/S0 элементарных зон привязки, где S и S0 - соответственно площади зоны контроля и элементарной зоны привязки, присваивают каждой элементарной зоне привязки порядковый номер n, n=1, 2, …, N, определяют координаты местоположения центров элементарных зон привязки
{X, Y}n, рассчитывают и запоминают эталонные значения первичных пространственно-информационных параметров (ППИП) на выходах Am,l-ных антенных элементов, где m,l=1, 2, …, M, m≠l, M>2, относительно направлений прихода тестирующего сигнала {θk}, с дискретностью Δθk в азимутальной плоскости, где k=1, 2, …, K; К·Δθk=2π, определяемой заданной точностью измерения координат ИРИ {ΔX, ΔY}, причем эталонные значения ППИП рассчитывают для средних частот fν=Δf(2V-1)/2, где V=1, 2, …, P; P=ΔF/Δf - число частотных поддиапазонов, Δf∈ΔF - ширина частотного поддиапазона, а в процессе работы при обнаружении пеленгатором в точке j, j=1, 2, …, J, сигнала ИРИ на частоте fν измеряют и запоминают ППИП на выходах Am,l-x антенных элементов решетки, с одновременным измерением и запоминанием вторичных параметров: координат местоположения пеленгатора и его азимутальной ориентации, формируют матрицу измерений Rj(θc,n)ν, размерность которой определяется размерами зоны контроля и элементарной зоны привязки, складывают элементы rj,c,n матрицы Rj(θc,n)ν, соответствующими элементами rj-1,c,n предшествующей матрицы Rj-1(θc,n)ν, присваивают суммарной матрице имя Rj(θc,n)ν, после выполнения J измерений ППИП определяют минимальную сумму Φn(fν) в элементах матрицы измерений Rj(θc,n)ν, а за координаты местоположения обнаруженного ИРИ принимают координаты местоположения центра элементарной зоны привязки {X, Y}n, соответствующие minΦn(fν).
Дополнительно рассчитывают эталонные значения ППИП  для углов места βγ прихода сигнала
для углов места βγ прихода сигнала  , γ=1, 2, …, Г; с дискретностью Δβγ, Δβγ·Г=π, в системе координат антенной системы.
, γ=1, 2, …, Г; с дискретностью Δβγ, Δβγ·Г=π, в системе координат антенной системы.
При формировании матрицы измерений Rj(θc,n)ν каждой элементарной зоне привязки приводят в соответствие направление прихода сигнала  ,
,  , значение которого определяется координатами центра n-ой элементарной зоны привязки, координатами летно-подъемного средства j-ой точке: широтой Blps j, долготой Llps j и высотой Hlps j, углами ориентации ЛПС: крена Klps j, тангажа τlps j и склонения ζlps j, а также углами ориентации антенны пеленгатора относительно борта ЛПС: крена kant, тангажа τant и склонения ζant. Каждому n-му направлению прихода сигнала
ставят в соответствие эталонное значение ППИП
, значение которого определяется координатами центра n-ой элементарной зоны привязки, координатами летно-подъемного средства j-ой точке: широтой Blps j, долготой Llps j и высотой Hlps j, углами ориентации ЛПС: крена Klps j, тангажа τlps j и склонения ζlps j, а также углами ориентации антенны пеленгатора относительно борта ЛПС: крена kant, тангажа τant и склонения ζant. Каждому n-му направлению прихода сигнала
ставят в соответствие эталонное значение ППИП  из набора
из набора  . Вычисляют разность между эталонными и измеренными значениями ППИП. Полученные разности возводят в квадрат и суммируют. На основе результатов вычислений формируют матрицу измерений
. Вычисляют разность между эталонными и измеренными значениями ППИП. Полученные разности возводят в квадрат и суммируют. На основе результатов вычислений формируют матрицу измерений  , размерность которой определяется размерами зоны контроля и элементарной зоны привязки, путем записи в ее элементы rj,c,n соответствующих значений сумм Φn(fν).
, размерность которой определяется размерами зоны контроля и элементарной зоны привязки, путем записи в ее элементы rj,c,n соответствующих значений сумм Φn(fν).
Благодаря новой совокупности существенных признаков в заявляемом способе за счет более полного учета пространственной ориентации антенны пеленгатора и использованию трехмерной технологии описания сигналов, а также размещению измерителя на борту летно-подъемного средства обеспечивается повышение доступности сигналов УКВ-СВЧ-диапазонов и точности местоопределения ИРИ.
В заявляемом устройстве определения координат источника радиоизлучения поставленная цель достигается тем, что в известном устройстве определения координат источника радиоизлучения, включающем последовательно соединенные блок оценивания, блок определения координат и блок индикации, группа информационных выходов которого является выходной шиной устройства, а вторая группа информационных входов блока определения координат является третьей установочной шиной устройства, блок измерения первичных пространственно-информационных параметров, последовательно соединенные первый вычислитель-формирователь и второй вычислитель-формирователь, и первый блок памяти, группа информационных выходов которого соединена со второй группой информационных входов второго вычислителя-формирователя, второй блок памяти, радионавигатор, группа информационных выходов которого соединена со второй группой информационных входов первого вычислителя-формирователя, генератор синхроимпульсов, выход которого соединен со входами синхронизации блока измерения ППИП, первого и второго вычислителей-формирователей, первого и второго блоков памяти, и блока оценивания, дополнительно введены последовательно соединенные третий вычислитель-формирователь, предназначенный для вычисления в нормальной системе координат истинного вектора направления  на центр n-ой элементарной зоны привязки с учетом измеренных в момент времени tj пространственных углов пеленгатора, где n=1, 2, …, N, и четвертый вычислитель-формирователь, предназначенный для вычисления значений азимутального угла θn и угла места βn на центр n-ой элементарной зоны привязки, где n=1, 2, …, N, группа информационных выходов которого соединена с группой адресных входов второго блока памяти, группа информационных выходов которого соединена с первой группой информационных входов пятого вычислителя-формирователя, предназначенного для вычисления значений функции корреляции Φn(fν) и формирования матрицы измерений Rj(θc,n)ν, вторая группа информационных входов которого соединена с группой информационных выходов блока измерения ППИП, третья группа информационных входов является шестой установочной шиной устройства, а группа информационных выходов соединена с группой информационных входов блока оценивания, а группа информационных входов третьего вычислителя-формирователя соединена с группой информационных выходов второго вычислителя-формирователя, блок определения пространственных параметров, предназначенный для нахождения предварительного направления
на центр n-ой элементарной зоны привязки с учетом измеренных в момент времени tj пространственных углов пеленгатора, где n=1, 2, …, N, и четвертый вычислитель-формирователь, предназначенный для вычисления значений азимутального угла θn и угла места βn на центр n-ой элементарной зоны привязки, где n=1, 2, …, N, группа информационных выходов которого соединена с группой адресных входов второго блока памяти, группа информационных выходов которого соединена с первой группой информационных входов пятого вычислителя-формирователя, предназначенного для вычисления значений функции корреляции Φn(fν) и формирования матрицы измерений Rj(θc,n)ν, вторая группа информационных входов которого соединена с группой информационных выходов блока измерения ППИП, третья группа информационных входов является шестой установочной шиной устройства, а группа информационных выходов соединена с группой информационных входов блока оценивания, а группа информационных входов третьего вычислителя-формирователя соединена с группой информационных выходов второго вычислителя-формирователя, блок определения пространственных параметров, предназначенный для нахождения предварительного направления  на центр n-ой элементарной зоны привязки, n=1, 2, …, N, первая группа информационных входов которого является первой установочной шиной устройства, а группа информационных выходов соединена с первой группой информационных входов первого вычислителя-формирователя, устройство угловой ориентации, первая группа информационных входов которого соединена с группой информационных выходов радионавигатора, второй группой информационных входов блока определения пространственных параметров и второй группой информационных входов третьего вычислителя-формирователя, вторая группа информационных входов является пятой установочной шиной устройства, а группа информационных выходов соединена с третьей группой информационных входов третьего вычислителя-формирователя, группа информационных входов первого блока памяти является четвертой установочной шиной устройства, входы синхронизации блока определения пространственных параметров, третьего, четвертого и пятого вычислителей-формирователей и устройства угловой ориентации объединены и соединены с выходом генератора синхроимпульсов, а группа информационных входов второго блока памяти является второй установочной шиной устройства.
на центр n-ой элементарной зоны привязки, n=1, 2, …, N, первая группа информационных входов которого является первой установочной шиной устройства, а группа информационных выходов соединена с первой группой информационных входов первого вычислителя-формирователя, устройство угловой ориентации, первая группа информационных входов которого соединена с группой информационных выходов радионавигатора, второй группой информационных входов блока определения пространственных параметров и второй группой информационных входов третьего вычислителя-формирователя, вторая группа информационных входов является пятой установочной шиной устройства, а группа информационных выходов соединена с третьей группой информационных входов третьего вычислителя-формирователя, группа информационных входов первого блока памяти является четвертой установочной шиной устройства, входы синхронизации блока определения пространственных параметров, третьего, четвертого и пятого вычислителей-формирователей и устройства угловой ориентации объединены и соединены с выходом генератора синхроимпульсов, а группа информационных входов второго блока памяти является второй установочной шиной устройства.
При этом первый вычислитель-формирователь предназначен для перевода пространственных параметров летно-подъемного средства  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектора направления с борта ЛПС на n-ую элементарную зону привязки
, а вектора направления с борта ЛПС на n-ую элементарную зону привязки  , где n=1, 2, …, N, в левостороннюю систему декартовых координат
, где n=1, 2, …, N, в левостороннюю систему декартовых координат  .
.
Второй вычислитель-формирователь предназначен для коррекции вектора направления на центр n-ой зоны привязки  , n=1, 2, …, N, с учетом априорно известной ориентации антенной системы пеленгатора
, n=1, 2, …, N, с учетом априорно известной ориентации антенной системы пеленгатора  относительно борта транспортного средства.
относительно борта транспортного средства.
Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи, позволяет достичь цели изобретения: повысить точность местоопределения ИРИ УКВ-СВЧ-диапазонах частот, а благодаря размещению измерителя на ЛПС - увеличить их доступность.
Заявляемые объекты поясняются чертежами, на которых показаны:
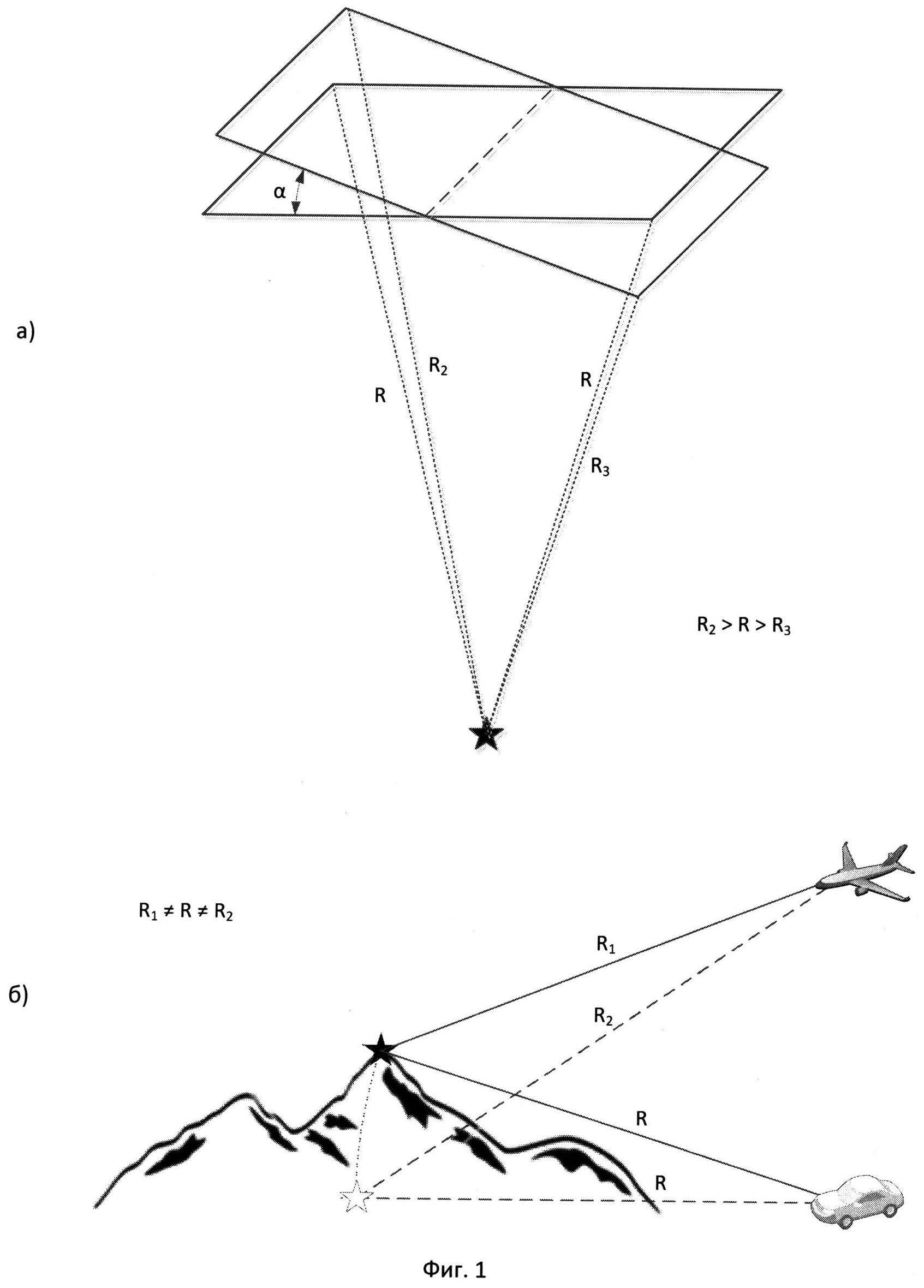
на фиг.1 - иллюстрации, объясняющие:
а) причину искажения пространственного описания антенной решетки (расстояния между фазовыми центрами АЭ в горизонтальной плоскости) при различных углах ее наклона;
б) природу возникновения ошибки местоопределения ИРИ в условиях пересеченной местности;
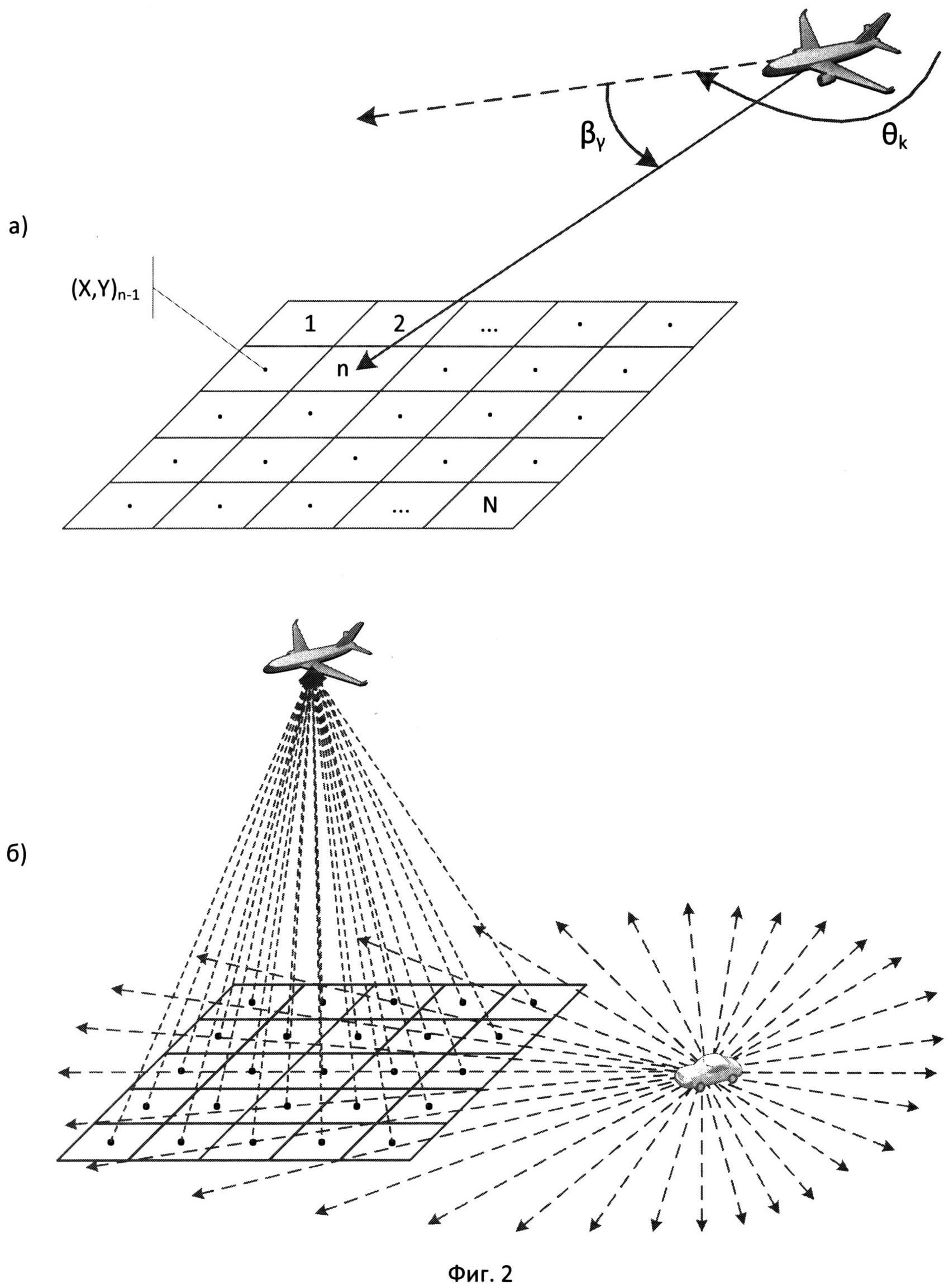
на фиг.2 - показан порядок выполняемых операций:
а) разбиения зоны контроля на элементарные зоны привязки;
б) формирования векторов направления
, на элементарные зоны
привязки;
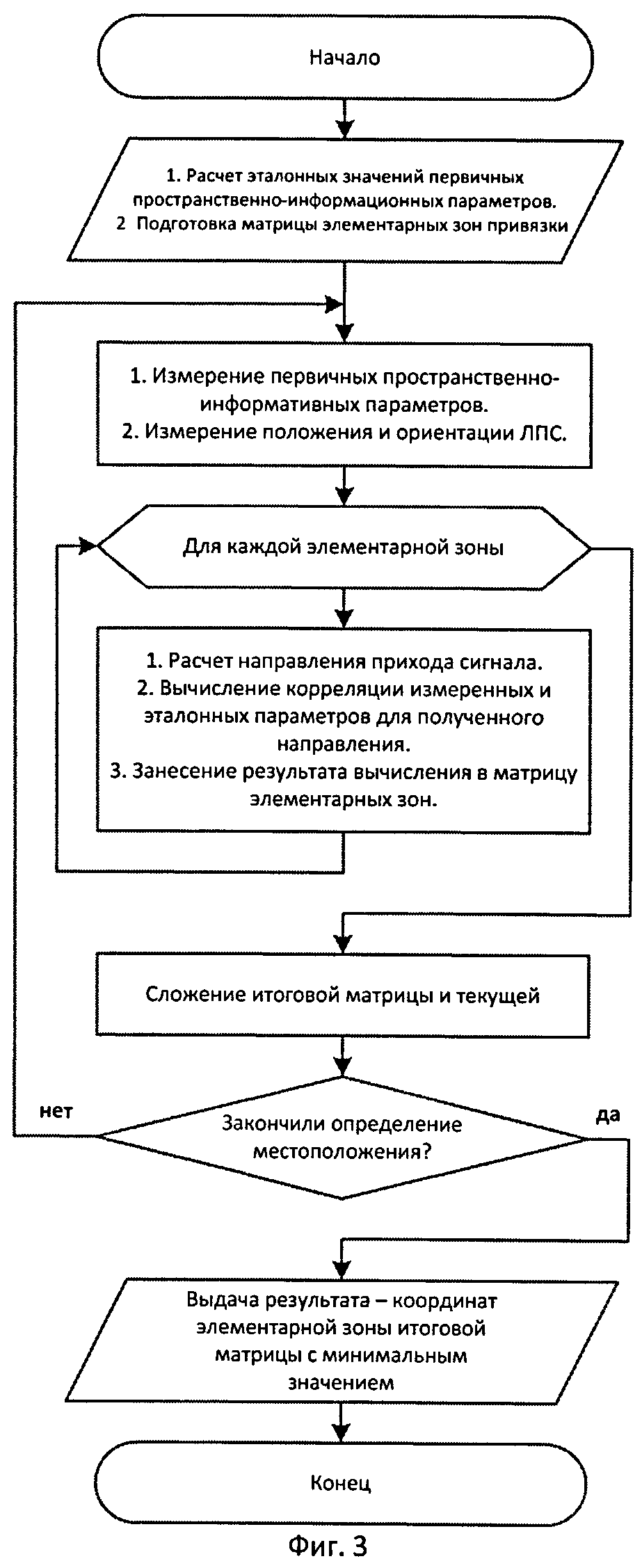
на фиг.3 - обобщенный алгоритм определения координат ИРИ;
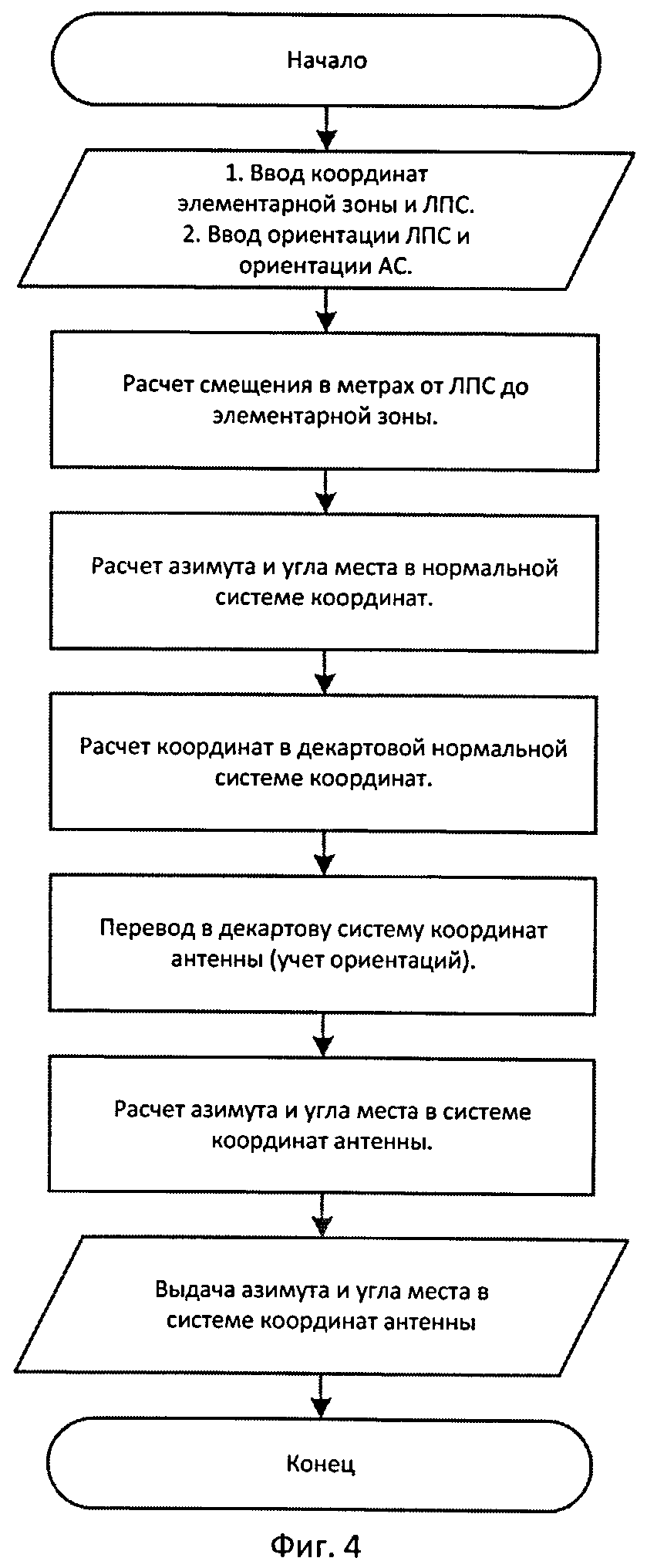
на фиг.4 - алгоритм расчета направления прихода сигнала;
на фиг.5 - обобщенная структурная схема устройства определения координат ИРИ;
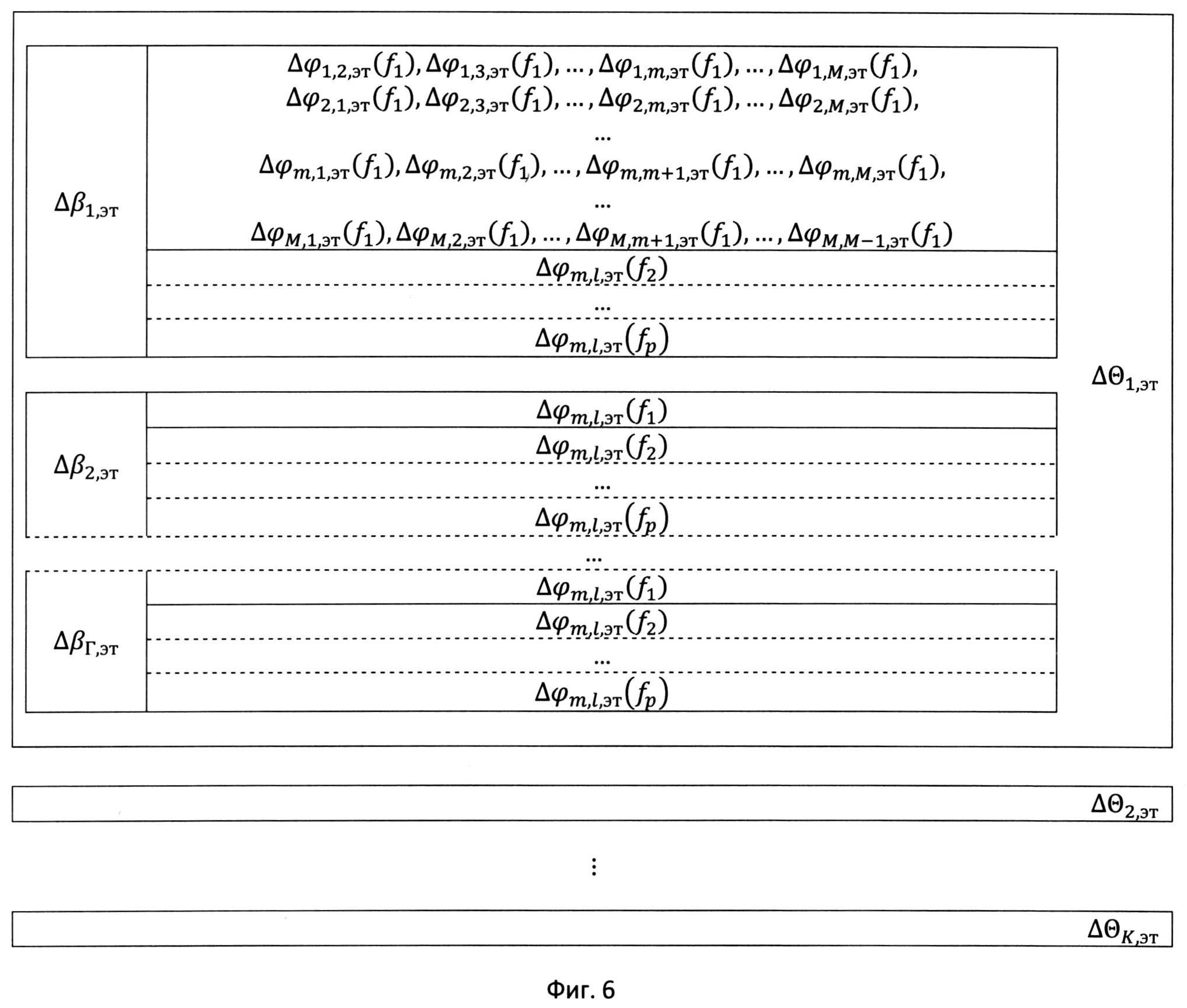
на фиг.6 - порядок формирования массива эталонных ППИП;
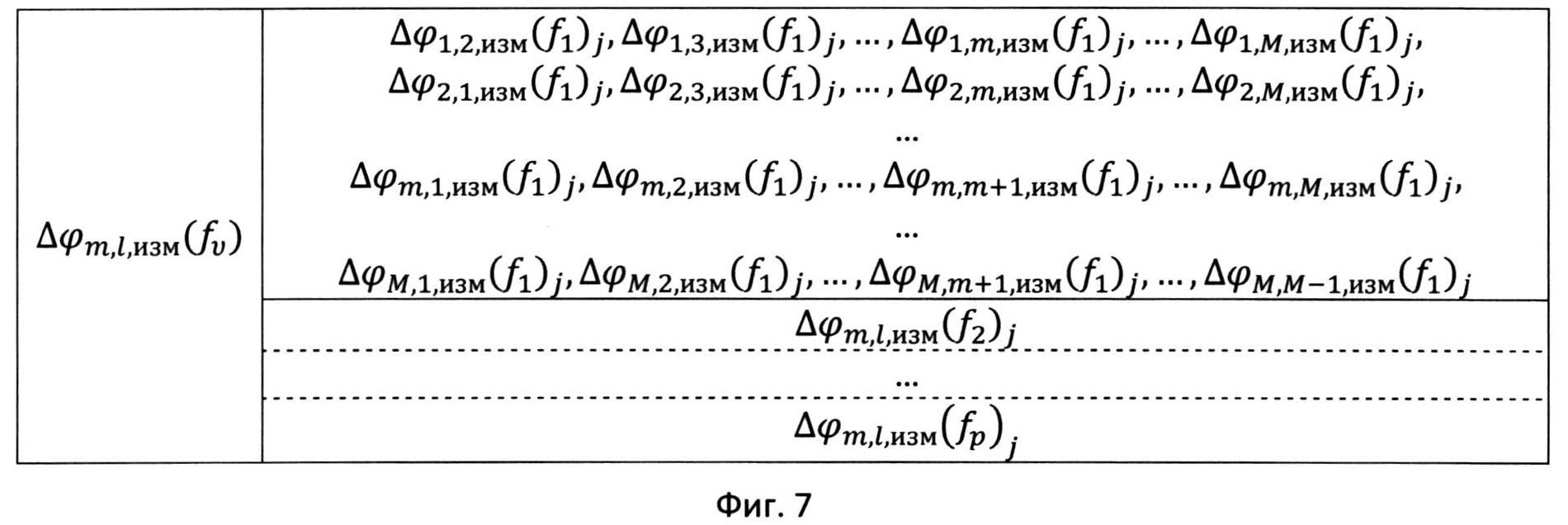
на фиг.7 - порядок формирования массива измеренных ППИП;
на фиг.8 - обобщенный алгоритм определения предварительного направления на центры элементарных зон привязки в системе координат антенной системы;
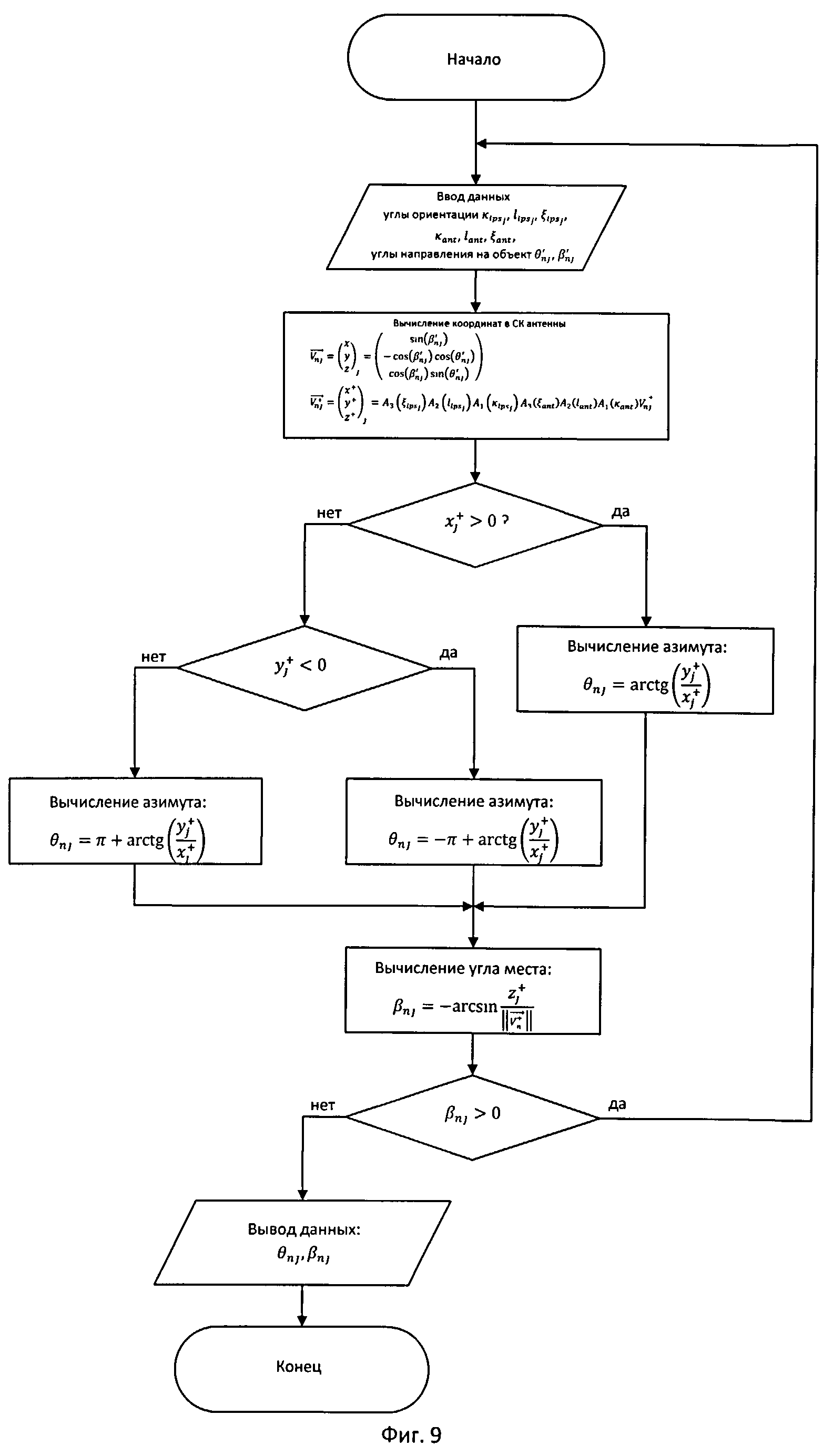
на фиг.9 - обобщенный алгоритм определения истинного направления на центры элементарных зон привязки в системе координат антенной системы;
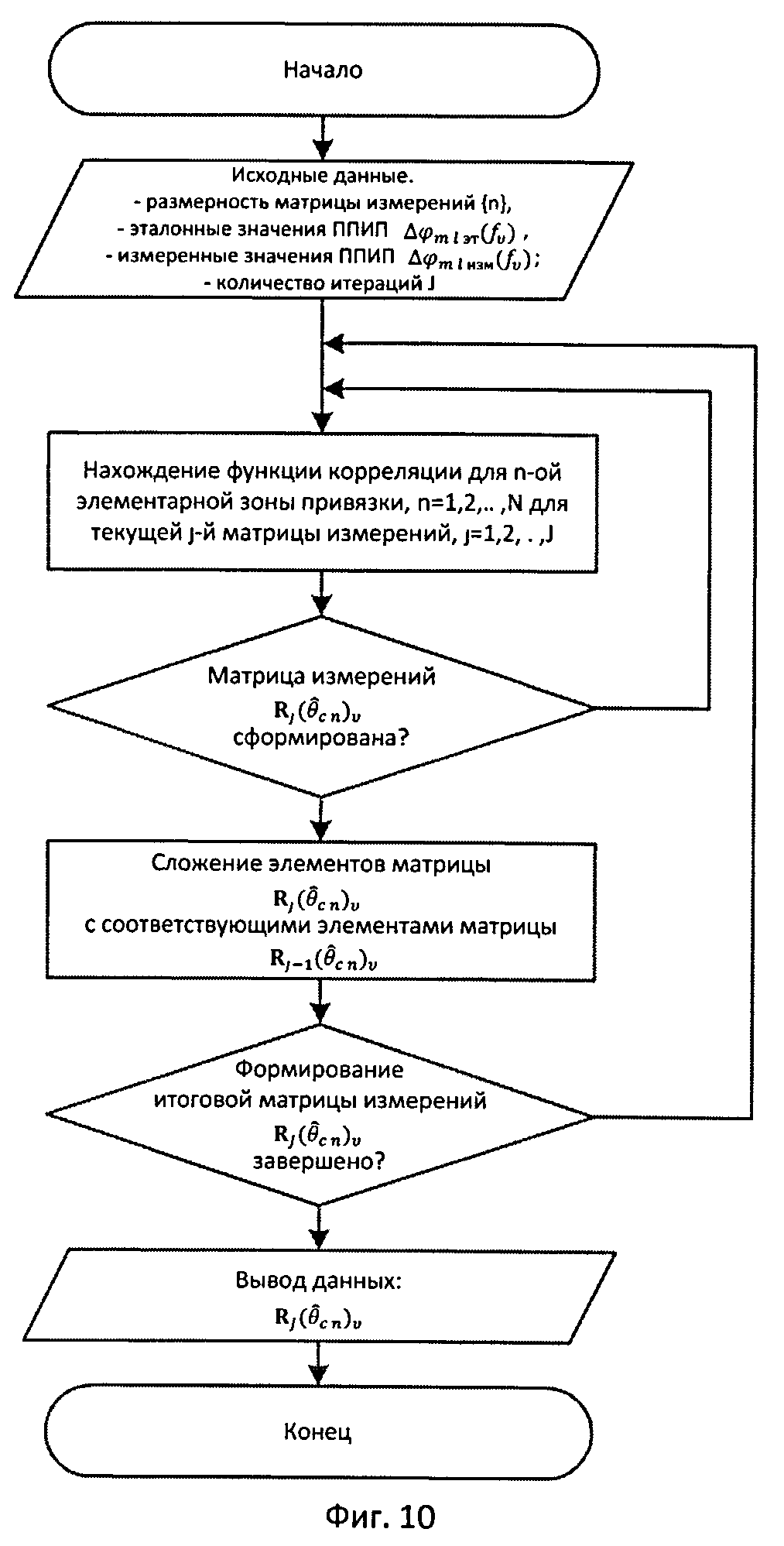
на фиг.10 - обобщенный алгоритм работы пятого вычислителя-формирователя;
на фиг.11 - структурная схема блока измерения первичных пространственно-информационных параметров.
Сущность изобретения состоит в следующем. В прототипе для каждой точки измерений j формируют набор значений корреляции на все направления в азимутальной плоскости (см. фиг.26). Далее эти значения вносятся в каждую ячейку памяти в соответствии с номерами элементарных зон привязки. Такой подход оправдан в связи с тем, что размерность этого набора существенно меньше количества элементарных зон привязки N, а расчет значения функции корреляции существенно дольше сопоставления элементарной зоне n, n=1, 2, …, N, конкретного направления.
В предлагаемых способе и устройстве для повышения точности определения координат ИРИ с ЛПС используют два параметра: азимут θk и угол места βγ прихода сигнала. В результате размерность набора участвующих в процессе измерений значений корреляции в соответствии с алгоритмом прототипа возрастает в квадрате. Поэтому становится нецелесообразным выполнять расчет всех возможных корреляций для каждого измерения.
Проиллюстрируем вышесказанное. Рассмотрим зону контроля 100×100 элементарных зон привязки, в которой оценивание будет осуществляться с шагом по азимутальному углу θk и углу места βγ в один градус. Последнее продиктовано не только заданной точностью измерений, но и тем фактом, что между соседними зонами и соседними направлениями функцию корреляции можно приближать самым быстрым способом - линейной или квадратичной интерполяцией. При таких условиях в прототипе необходимо выполнить 360 расчетов значений корреляции. Получивший дальнейшее развитие данный подход до оценивания в объеме (Пат. РФ 2327186) потребует 360×180=64800 вычислений. В предлагаемых способе и устройстве для каждой элементарной зоны привязки рассчитывают направление на нее с пеленгатора и далее значение функции корреляции, что позволяет сократить количество вычислений до 100×100=10000.
Большинство современных способов и устройств определения координат ИРИ базируется на следующих носителях: человек, автотранспорт различных классов, корабль, БЛА, вертолет, самолет, искусственных спутник Земли. Все они предназначены для решения определенного класса задач и имеют свои достоинства и недостатки. Способ-прототип базируется на использовании автотранспортного носителя пеленгатора. В связи с этим в качестве его основного недостатка выступает низкий уровень доступности сигналов УКВ-СВЧ-диапазонов частот в силу особенностей их распространения. Кроме того, боковые наклоны антенной решетки в процессе движения пеленгатора приводит к ошибкам измерений из-за изменения расстояния между фазовыми центрами АЭ в горизонтальной плоскости (см. фиг.1, а). Иначе данную ситуацию можно рассматривать как неучтенное измерение расстояния от АЭ до ИРИ. Дополнительный вклад в погрешности измерений вносит представление заданного района измерений в виде плоскости, что часто не соответствует действительности. В результате имеют место искажения расстояния от АЭ до ИРИ (см. фиг.1, б).
В предлагаемых способе и устройстве устраняются названные недостатки прототипа. Для обеспечения доступности сигналов УКВ-СВЧ-диапазонов предлагается разместить пеленгатор на ЛПС, например на беспилотном летательном аппарате (БЛА) «Орлан-10», выпускаемом ООО «СТЦ», Санкт-Петербург. Высокая точность определения собственного местоположения обеспечивается с помощью глобальной навигационной спутниковой системы (ГНСС) (см. B.C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. Спутниковые радионавигационные системы / Под ред. В.С. Шебшаевича. - М.: Радио и связь, 1993, стр.261-275). Однако кроме информации о собственном местоположении ЛПС и направлении его перемещения при решении задач определения местоположения ИРИ необходимо знание его пространственной ориентации: крена klps j, тангажа τlps j и курсового угла αlps (угла сноса или склонения ζlps j), где
ζlps j=µlps j-αlps j, µlps j - значение путевого угла в j-й точке БЛА. Эту информацию возможно получить с помощью известных устройств (см. Пат. РФ №2374659, МПК 7 60137/00, опубл. 27.11.2009 г., бюл. №33. Способ и устройство угловой ориентации летательных аппаратов; Пат. РФ №2371733, МПК 7 60135/0, опубл. 27.10.2009 г., бюл. №30. Способ определения ориентации летательных аппаратов).
Реализация заявляемого способа поясняется следующим образом (см. фиг.3 и 4). На подготовительном этапе по аналогии с прототипом заданную зону контроля S делят на элементарные зоны привязки S0 (см. фиг.2). Размеры элементарной зоны привязки соответствуют предварительно заданной точности местоопределения ИРИ {ΔX, ΔY}. Далее находят географические координаты центров элементарных зон привязки {X, Y}n и присваивают каждой из них порядковый номер n, n=1, 2, …, N. Полученная матрица элементарных зон привязки сохраняет свою актуальность только для конкретного района. В случае определения местоположения ИРИ в другом районе необходимо построить новую матрицу. Весь частотный диапазон ΔF делят на поддиапазоны, ширина которых Δf определяется шириной пропускания приемных трактатов пеленгатора или значениями стандартной сетки частот, используемых в современных радиосредствах. Для УВЧ-диапазона последняя составляет 25 кГц. Поддиапазоны, количество которых P=ΔF/Δf, также нумеруют: V=1, 2, …, P.
Далее рассчитывают эталонные значения ППИП для средних частот всех поддиапазонов fν=Δf(2V-1)/2. В качестве ППИП используют значения разности фаз сигналов Δφm,l, для всех возможных парных комбинаций антенных элементов в рамках антенной решетки пеленгатора. Порядок расчета эталонных ППИП известен (см. Пат. РФ №2327186, МПК 601913/46, опубл. 20.06.2008 г., бюл. №17). Вводят топологию антенной системы (АС), которая включает значения взаимных расстояний между АЭ. Величина погрешности измерений углов Δθk и Δβγ определяется из следующих соображений. Погрешности измерений параметров Δθk и Δβγ не должны приводить к ошибкам местоположения, превышающим площадь элементарной зоны привязки. В процессе расчета эталонных ППИП моделируют размещение эталонного источника поочередно вокруг антенной решетки пеленгатора с дискретностью Δθk и Δβγ, на удалении нескольких длин волн. При этом полагается, что фронт приходящей волны плоский. Для каждого из угловых параметров Δθk, k=1, 2, …K и Δβγ, γ=1, 2, …, Г, вычисляют значения разности фаз Δφm,l,эт(fν) для всех возможных комбинаций пар АЭ решетки и всех частотных поддиапазонов V:

где 
- расстояние между плоскими фронтами в m-ном и l-ном антенных элементах, пришедших к решетке под углами Δθk в азимутальной и Δβγ в вертикальной плоскостях, m≠l; xm, ym, zm и xl, yl, zl - координаты m-го и l-го АЭ решетки, c - скорость света. В случае использования АС с плоским (горизонтальным) размещением АЭ (zl=zm) выражение (2) принимает вид

Полученные в результате измерений эталонные ППИП Δφm,l,эт(fν) оформляют в виде эталонного массива данных, вариант представления информации в котором показан на фиг.6.
Далее измеряют ориентацию АС пеленгатора в трех плоскостях, принятых в авиации как крена kant, тангажа lant и склонения ζant {kant, lant, ζant} относительно корпуса БЛА. Значения {kant, lant, ζant} запоминают и в последующем используют для уточнения результатов измерения  и
и  .
.
Исходя из того, что эталонные значения Δφm,l,эт(fν) зависят только от частоты fν, направления  в системе координат антенны и геометрии антенной решетки и не зависят от маршрута полета, положения ориентации БЛА, то эти значения рассчитываются один раз перед началом работы.
в системе координат антенны и геометрии антенной решетки и не зависят от маршрута полета, положения ориентации БЛА, то эти значения рассчитываются один раз перед началом работы.
При обнаружении одного или нескольких сигналов в точке j в заданной полосе частот ΔF формируют массив измеренных ППИП (см. фиг.7), структура представления информации в котором аналогична вышерассмотренной на фиг.6. Для этого на борту БЛА значения Δφm,l,изм(fν)j, измеренные в точке j для всех сочетаний пар антенных элементов Am,l всех частотных поддиапазонов, оформляют в массив измеренных ППИП.
Для очередного цикла оценивания j формируют текущую матрицу измерений  . Каждый из ее элементов rj,c,n соответствует n-й элементарной зоне привязки. Нахождение элемента rj,c,n матрицы
начинают с вычисления предполагаемого направления прихода сигнала из центра n-й зоны {X, Y}n на ЛПС без учета углов ориентации (используют только координаты ЛПС (БЛА) и объекта). Вычисляют смещения центра n-й элементарной зоны привязки относительно ЛПС по трем координатам (в декартовой системе координат с ЛПС, находящимся в ее центре). Оси системы координат направлены следующим образом: по касательной к меридиану
. Каждый из ее элементов rj,c,n соответствует n-й элементарной зоне привязки. Нахождение элемента rj,c,n матрицы
начинают с вычисления предполагаемого направления прихода сигнала из центра n-й зоны {X, Y}n на ЛПС без учета углов ориентации (используют только координаты ЛПС (БЛА) и объекта). Вычисляют смещения центра n-й элементарной зоны привязки относительно ЛПС по трем координатам (в декартовой системе координат с ЛПС, находящимся в ее центре). Оси системы координат направлены следующим образом: по касательной к меридиану
dBn j, по касательной к параллели dLn j и по перпендикуляру к земной поверхности dHn j в метрах:

где Deq - длина экватора в метрах.
Зная указанные координаты, несложно определить предварительные (без учета ориентации ЛПС) значения азимута  и угла места
и угла места  направления с ЛПС на центр элементарной зоны привязки путем перевода полученных результатов в сферическую систему координат
направления с ЛПС на центр элементарной зоны привязки путем перевода полученных результатов в сферическую систему координат


На следующем этапе на основе полученных результатов учитывают ориентацию ЛПС в пространстве путем последовательного перехода из одной системы координат в другую. С этой целью изначально на основе  и
и  формируют вектор
формируют вектор  в декартовой системе, удобный для применения матриц поворота на углы ориентации
в декартовой системе, удобный для применения матриц поворота на углы ориентации

Удобство применения вектора направления на центр n-й элементарной зоны привязки  основывается на следующем. Во-первых, вычисление угла
возможно только в рассматриваемой системе координат, так как это фактически угол отклонения направления на центр n-й элементарной зоны привязки от горизонтальной плоскости в точке нахождения ЛПС. Во-вторых, в этой системе координат удобно решать задачу определения точки пересечения вектора направления на центр n-й элементарной зоны привязки с «круглой Землей» в силу того обстоятельства, что одна из осей системы координат направлена к центру Земли (см. Авиация: Энциклопедия. - М.: Большая Российская энциклопедия, 1994 г.).
основывается на следующем. Во-первых, вычисление угла
возможно только в рассматриваемой системе координат, так как это фактически угол отклонения направления на центр n-й элементарной зоны привязки от горизонтальной плоскости в точке нахождения ЛПС. Во-вторых, в этой системе координат удобно решать задачу определения точки пересечения вектора направления на центр n-й элементарной зоны привязки с «круглой Землей» в силу того обстоятельства, что одна из осей системы координат направлена к центру Земли (см. Авиация: Энциклопедия. - М.: Большая Российская энциклопедия, 1994 г.).
В результате перемножение этого вектора на шесть матриц поворота в определенном порядке (по количеству учитываемых углов) получают вектор  , соответствующий истинному направлению на центр n-й элементарной зоны привязки в системе координат антенной системы пеленгатора
, соответствующий истинному направлению на центр n-й элементарной зоны привязки в системе координат антенной системы пеленгатора

где 
φ - значение соответствующего пространственного параметра ЛПС.
Перевод полученных координат в сферическую систему координат позволяет получить искомые углы направления на центр n-й элементарной зоны привязки: азимут θn и угол места βn


где 
Аналогичные операции выполняют в отношении всех N элементарных зон привязки.
Далее для N полученных направлений и известной частоты fν выбирают эталонные значения ППИП Δφm,l,эт(fν). Это правомочно в связи с тем, что эталонные значения Δφm,l,эт(fν) и измеренные значения Δφm,l,изм(fν) рассчитаны в единой системе координат антенны. В связи с этим стало возможным нахождение функции корреляции между эталонными и измеренными значениями. С этой целью вычисляют разность между соответствующими эталонными и измеренными значениями ППИП, полученные разности возводят в квадрат и суммируют

На основе результатов вычислений формируют матрицу измерений
, размерность которой определяется размерами зоны контроля и элементарной зоны привязки, путем записи в ее элементы rj,c,n соответствующих значений сумм Φn(fν).
На следующем этапе складывают содержимое элементов rj,c,n матрицы
, с соответствующим содержимым элементов rj-1,c,n предшествующей матрицы измерений  , которая была сформирована в результате измерений на предыдущей j-1 точке. Суммарной матрице присваивают имя
. После выполнения J измерений ППИП определяют минимальную сумму Φn(fν) в элементах результирующей матрицы измерений. Значение J определяется заданной точностью местоопределения ИРИ или длительностью его работы. Координаты местоположения центра элементарной зоны привязки {X, Y}n, соответствующие minΦn(fν), принимают за координаты местоположения обнаруженного на частоте fν ИРИ.
, которая была сформирована в результате измерений на предыдущей j-1 точке. Суммарной матрице присваивают имя
. После выполнения J измерений ППИП определяют минимальную сумму Φn(fν) в элементах результирующей матрицы измерений. Значение J определяется заданной точностью местоопределения ИРИ или длительностью его работы. Координаты местоположения центра элементарной зоны привязки {X, Y}n, соответствующие minΦn(fν), принимают за координаты местоположения обнаруженного на частоте fν ИРИ.
Таким образом, одним из существенных различий между прототипом и заявляемым способом является смена подхода «расчет всех возможных значений корреляций и применение их для элементарных зон привязки» на подход «расчет значений корреляций для каждой элементарной зоны». Использование ЛПС (БЛА) в качестве транспортной базы позволяет обеспечить существенное улучшение доступности сигналов в УКВ-СВЧ-диапазонах частот, а полный учет пространственной ориентации пеленгатора в совокупности с учетом рельефа местности заданного района (использование параметра βγ) позволяют повысить точность определения координат ИРИ. С другой стороны, при развитии способа-прототипа до измерений в пространстве (см. Пат. РФ 2327186), предлагаемый способ обеспечивает существенное сокращение временных затрат в 6-8 раз при прочих равных условиях.
Заявляемое устройство, показанное на фиг.5, состоит из последовательно соединенных блока определения пространственных параметров 2, первого вычислителя формирователя 3, второго вычислителя-формирователя 4, третьего вычислителя-формирователя 5, четвертого вычислителя-формирователя 6, второго блока памяти 7, пятого вычислителя-формирователя 8, блока оценивания 9, блока определения координат 10 и блока индикации 11, группа информационных выходов которого является выходной шиной 12 устройства, а первая группа информационных входов блока определения пространственных параметров 2 является первой установочной шиной 1 устройства, вторая группа информационных входов блока определения координат 10 является третьей установочной шиной 14 устройства, блока измерения первичных пространственно-информационных параметров 19, группа информационных выходов которого соединена со второй группой информационных входов пятого вычислителя-формирователя 8, третья группа информационных входов которого является шестой установочной шиной 21 устройства, группа информационных входов второго блока памяти 7 является второй установочной шиной 13 устройства, устройство угловой ориентации 18, вторая группа информационных входов которого является пятой установочной шиной 20 устройства, а группа информационных выходов соединена с третьей группой информационных входов третьего вычислителя-формирователя 5, радионавигатора 17, группа информационных выходов которого соединена с первой группой информационных входов устройства угловой ориентации 18, второй группой информационных входов блока определения пространственных параметров 2, второй группой информационных входов первого вычислителя-формирователя 3 и второй группой информационных входов третьего вычислителя-формирователя 5, первого блока памяти 16, группа информационных входов которого является четвертой установочной шиной 15 устройства, а группа информационных выходов соединена со второй группой информационных входов второго вычислителя-формирователя 4, генератора синхроимпульсов 22, выход которого соединен со входами синхронизации блока определения пространственных параметров 2, первого 3, второго 4, третьего 5, четвертого 6 и пятого 8 вычислителей-формирователей, первого 16 и второго 7 блоков памяти, устройства угловой ориентации 18 и блока измерения первичных пространственно-информационных параметров 19.
Работа заявляемого устройства (см. фиг.5) осуществляется следующим образом. На подготовительном этапе зона контроля S разбивается на N элементарных зон привязки (см. фиг.2). Площадь зоны привязки S0 определяется заданной точностью измерения координат ИРИ {ΔX, ΔY}. Определяют координаты местоположения центров элементарных зон привязки {X, Y)n. Результаты вычислений (номера и координаты центров элементарных зон привязки) поступают на первую 1 и третью 14 установочные шины устройства соответственно. В блоках 2 и 10 они записываются в ячейки памяти, номера которых соответствуют номерам элементарных зон привязки.
На следующем этапе рассчитывают эталонные значения первичных пространственно-информационных параметров Δφm,l,эт(fν) для средних частот всех поддиапазонов fν=Δf(2V-1)/2. Данная операция начинается с пространственного описания антенной решетки пеленгатора (см. фиг.1). С этой целью измеряют взаимные расстояния между АЭ Am,l. На их основе рассчитывают значения Δφm,l,эт(fν) по описанному выше алгоритму. При этом моделируют размещение эталонного источника поочередно вокруг АС измерителя с дискретностью Δθ и Δβ на удалении нескольких длин волн. Полученные значения Δφm,l,эт(fν) поступают на вход второго блока памяти 7 по второй установочной шине 13. Здесь осуществляется их запись по адресам в соответствии со значениями углов θk и βγ. Реализация данной функции известна (аналогична устройству-прототипу на микроконтроллере K1810BM86) и в рамках этих материалов не рассматривается.
Далее уточняют ориентацию АС относительно борта ЛПС {kant, lant, ζant}. Эти параметры в процессе полета ЛПС остаются неизменными. Поэтому результаты измерений по четвертой установочной шине 15 поступают на группу информационных входов первого блока памяти 16, где осуществляется их хранение в течение всего периода функционирования устройства.
В процессе работы устройства с помощью блока 19 (см. фиг.11) осуществляют поиск и обнаружение сигналов ИРИ в заданной полосе частот ΔF с последующим измерением ППИП Δφm,l(fν) для всех возможных сочетаний пар АЭ. Выполнение этой операции соответствует формированию массива измеренных ППИП Δφm,l,изм(fν). Найденные значения Δφm,l,изм(fν) поступают на вторую группу информационных входов пятого вычислителя-формирователя 8, где запоминаются в его буферной памяти. В то же время определяют местоположение ЛПС с помощью радионавигатора 17. Одновременно с помощью блока определения пространственных параметров 2 вычисляют предварительные направления с ЛПС на центры всех N элементарных зон привязки в соответствии с выражениями (4)-(8). Исходные данные для определения направлений  и
и  поступают по первой и второй группам информационных входов блоков 2 {B, L, H} и {Blps, Llps, Hlps}n с первой установочной шиной 1 и радионавигатора 17 соответственно.
поступают по первой и второй группам информационных входов блоков 2 {B, L, H} и {Blps, Llps, Hlps}n с первой установочной шиной 1 и радионавигатора 17 соответственно.
В блоке 2 результаты определения улов  и
и  получены без учета ориентации антенной системы пеленгатора относительно корпуса ЛПС и собственно его пространственной ориентации. Данный недостаток устраняется следующим образом. Значения углов
и
с группы информационных выходов блока 2 поступают на первую группу информационных входов первого вычислителя-формирователя 3. На второй группе его информационных входов присутствуют текущие значения пространственных параметров пеленгатора (ЛПС)
получены без учета ориентации антенной системы пеленгатора относительно корпуса ЛПС и собственно его пространственной ориентации. Данный недостаток устраняется следующим образом. Значения углов
и
с группы информационных выходов блока 2 поступают на первую группу информационных входов первого вычислителя-формирователя 3. На второй группе его информационных входов присутствуют текущие значения пространственных параметров пеленгатора (ЛПС)  , поступающие с выхода блока 17. В функции блока 3 входит перевод пространственных параметров пеленгатора
, поступающие с выхода блока 17. В функции блока 3 входит перевод пространственных параметров пеленгатора  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектора направления на n-ую элементарную зону привязки
, а вектора направления на n-ую элементарную зону привязки  , где n=1, 2, …, N, в левостороннюю систему декартовых координат
, где n=1, 2, …, N, в левостороннюю систему декартовых координат  в соответствии с выражениями (9).
в соответствии с выражениями (9).
Второй и третий вычислители 4 и 5 соответственно предназначены для последовательной реализации выражения (10).
Найденные в блоке 3 значения векторов
поступают на первую группу информационных входов второго вычислителя-формирователя 4. На второй группе его информационных входов присутствуют измеренные на подготовительном этапе данные по взаимной пространственной ориентации ЛПС и АС пеленгатора (kant, lant, ζant), поступающие с выхода первого блока памяти 16. В функцию блока 4 входит коррекция вектора направления на центр n-ой зоны привязки
, n=1, 2, …, N, с учетом априорно известной ориентации антенной системы пеленгатора относительно борта ЛПС в соответствии с выражением

где 
На следующем этапе в третьем вычислителе-формирователе 5 учитывают ориентацию ЛПС (пеленгатора) относительно земной поверхности и положение ЛПС в пространстве, что позволяет получить истинные направления на центры всех элементарных зон привязки 

С этой целью на первую группу информационных входов блока 5 поступают значения векторов
с группы информационных выходов второго вычислителя-формирователя 4, на вторую группу информационных входов поступает текущее значение высоты ЛПС Hlps с группы информационных выходов радионавигатора 17, а на третью группу информационных входов - текущие значения пространственной ориентации ЛПС (klps, llps, ζlps) с группы информационных выходов устройства угловой ориентации 18.
В результате с помощью блоков 2-5, 16-18 в точке у определяют истинное направление от ЛПС на центры всех N элементарных зон привязки. В качестве следующего шага выступает перевод полученных векторов
в сферическую систему координат для получения искомых углов направления θn,j и βn,j в системе координат АС. Данную функцию выполняет четвертый вычислитель 6 в соответствии с выражением (12), на группу информационных входов которого поступают значения векторов
с группы информационных выходов блока 5.
Найденные значения θn,j и βn,j для всех N элементарных зон привязки поступают на адресные входы второго блока памяти 7. В соответствии с этими адресами из блока 7 изымаются эталонные значения ППИП Δφm,l,эт(fν), хранящиеся в нем. Последние поступают на первую группу информационных входов пятого вычислителя-формирователя 8, на второй группе информационных входов которого присутствуют измеренные значения ППИП Δφm,l,изм(fν)j. В функции блока 8 входит нахождение функции корреляции между эталонными и измеренными значениями ППИП в соответствии с (12) и формирование на их основе матрицы измерений
. При этом размерность матрицы
определяется размерами зоны контроля и элементарной зоны привязки. Кроме того, в блоке 8 осуществляется сложение элементов матрицы rj,c,n с соответствующими элементами предшествующей матрицы  , хранящейся в буферной памяти блока 8. При завершении операции сложения результаты вычислений переписываются обратно в буферную память.
, хранящейся в буферной памяти блока 8. При завершении операции сложения результаты вычислений переписываются обратно в буферную память.
После выполнения J аналогичных итераций значение сформированной матрицы измерений
поступает на группу информационных входов блока оценивания 9. В функции блока 9 входит определение элемента rj,c,n матрицы измерений
, в которой записана минимальная сумма Φn(fν). На выходе блока 9 формируется код числа rj,c,n, соответствующий номеру элемента матрицы измерения
, в котором содержится minΦn(fν). Данная кодовая комбинация соответствует номеру элементарной зоны привязки n с наиболее вероятным местоположением ИРИ.
Кодовая комбинация с группы информационных выходов блока 9 поступает на группу адресных входов блока определения координат 10. Последний, по аналогии с прототипом, представляет собой блок памяти, в котором в соответствии с номерами элементарных зон привязки (адресами) хранятся координаты их центров {X,Y}n. С поступлением кодовой комбинации n на адресные входы блока 10 на его информационных выходах формируется сигнал с координатами местоположения ИРИ {X,Y}n. Последние поступают на информационные входы блока индикации 11 для отображения результатов определения координат ИРИ и далее на выходную шину устройства 12. Синхронность выполнения рассмотренных выше операций обеспечивают импульсы генератора синхроимпульсов 22.
В устройстве, реализующем предложенный способ, используют известные элементы и блоки, описанные в научно-технической литературе.
Блоки 7, 9, 10, 11, 16, 17, 19 и 22 реализуют аналогично соответствующим блокам устройства-прототипа. Реализация блоков памяти 7 и 16 известна (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю. Горденов и др. - М.: Радио и связь, 1990, - 288 с.).
Блок 9 предназначен для определения номера ячейки буферной памяти блока 8 с минимальной суммой Φn(fν), соответствующей номеру элементарной зоны привязки, в которой наиболее вероятно нахождение ИРИ. Реализуется в соответствии с фиг.17 устройства-прототипа.
Блок определения координат 10 представляет собой перепрограммируемое постоянное запоминающее устройство на основе микросхем серий КМ1809 или КМ558 (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю. Горденов и др. - М.: Радио и связь, 1990-288 с.). На подготовительном этапе по шине 14 осуществляют запись координат центров элементарных зон привязки {X,Y}n в блок 10. При этом адреса ячеек памяти блока 10 совпадают с номерами элементарных зон привязки. В процессе работы заявляемого устройства на адресные входы блока 10 поступает код числа с номером элементарной зоны привязки, в которой наиболее вероятно размещение ИРИ.
В соответствии с данной кодовой комбинацией на выходе блока 10 формируется кодовая комбинация, соответствующая координатам элементарной зоны привязки {X,Y}n.
Реализация блока индикации 1 известна и описана, например, в книге Быстров А.Ю. и др. Сто схем с индикаторами / Быстров А.Ю. и др. - М.: Радио и связь, 1990, - 112 с.; Пароль Н.В., Кайдалов С.А. Знакосинтезирующие индикаторы и их применение: Справочник - М.: Радиосвязь, 1998. - 128 с.
Реализация генератора синхроимпульсов 22 известна и широко освещена в литературе (см., например, Радиоприемные устройства: учебное пособие для радиотехн. Спец. ВУЗов / Ю.Т. Давыдов и др. - М.: Высшая школа, 1989, - 342 с.).
Радионавигатор 17 предназначен для измерения путевого угла µlps, широты Blps, долготы Llps и высоты Hlps в момент времени ti нахождения ЛПС в пространстве (момент измерения параметров угловой ориентации ЛПС). Данная функция может быть реализована с помощью навигатора GPS (см. Garmin, GPS навигаторы 12, 12 XL, 12 СХ. Руководство пользователя www.jj.connect.ru).
Блок определения пространственных параметров 2, первый 3, второй 4, третий 5 и четвертый 6 вычислители-формирователи предназначены для предварительного определения направления ЛПС на центры элементарных зон привязки (блок 2) и последующего уточнения этого значения благодаря учету ориентации АС измерителя относительно борта ЛПС и собственно угловой ориентации ЛПС в пространстве. Каждый из названных блоков выполняет строго определенные в выражениях (4) - (11) операции, реализация которых известна. Для повышения быстродействия названные блоки могут быть реализованы на специализированном микропроцессоре TMS320c6416, что дополнительно позволит уменьшить массогабаритные характеристики и потребляемый ток (см. TMS320c6416 http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html), алгоритм работы которых приведен на фиг.8 (блок 2) и фиг.9 (блоки 3-5).
Пятый вычислитель-формирователь 8 предназначен (по аналогии с блоком 9 устройства-прототипа) для формирования матрицы измерений
, размерность которой находится в строгом соответствии с разбиением заданной зоны контроля на элементарные зоны привязки. Названную операцию блок 8 выполняет соответственно с блоками 7 и 19. Дополнительно в функции блока 8 входит вычисление значений функций корреляции (элементов матрицы
) в соответствии с вычислением (12). Порядок выполнения этой операции аналогичен соответствующей операции в устройстве-прототипе (см. фиг.4. Пат. РФ 2283505).
В связи с массогабаритными ограничениями, ограничениями по потребляемой энергетике вследствие размещения оборудования на борту ЛПС целесообразно блок 8 реализовать на специализированном микропроцессоре TMS320c6414 совместно с блоками 2-7, алгоритм работы которого приведен на фиг.10.
Устройство угловой ориентации 18 предназначено для измерения пространственных параметров ЛПС: крена klps, тангажа llps и склонения ζlps. Реализация блока 18 известна, может быть выполнена в соответствии с Пат. РФ 2374659, МПК G01S 5/00, опубл. 27.11.2009 г., бюл. №33; Пат. РФ 2371733, МПК G01S 5/00, опубл. 27.10.2009 г., бюл. №30. Перед полетом или в процессе полета ЛПС по пятой установочной шине 20 задают оценочные значения скорости ветра U и его направление δ.
Блок измерения первичных пространственно-информационных параметров 19 предназначен для измерения ППИП, в качестве которых выступает разность фаз сигналов Δφm,l(fν) для всех возможных парных комбинаций АЭ в рамках АС пеленгатора. Содержит (см. фиг.11) последовательно соединенную антенную систему 23, антенный коммуникатор 24 (для двухканального исполнения блока 19), радиоприемное устройство 25, аналого-цифровой преобразователь 26, блок преобразования Фурье, блок вычисления разности фаз 28 и блок памяти 29. При двухканальном исполнении блока 19 блоки 25-28 имеют также двухканальное исполнение. При многоканальном исполнении блока 19 (количество каналов обработки сигналов соответствует количеству АЭ) необходимость в антенном коммутаторе 24 отпадает, а блоки 25-28 имеют соответствующую канальность. Блоки с 23 по 28 реализуются аналогично соответствующим блокам устройства-прототипа.






Способ многоканального адаптивного приема радиосигналов и устройство, его реализующее
Симметричная поликоническая антенна
Способ резки хрупких неметаллических материалов
Способ и устройство создания преднамеренных помех
Способ пеленгации радиосигналов и пеленгатор для его осуществления
Способ и устройство определения координат источников радиоизлучений
Способ и устройство определения координат объектов
Способ и устройство определения угловой ориентации летательных аппаратов
Устройство создания преднамеренных помех
Амплитудный радиопеленгатор (варианты)
Способ многоканального адаптивного приема радиосигналов и устройство, его реализующее
Симметричная поликоническая антенна
Способ моделирования сетей связи
Способ защиты канала связи вычислительной сети
Способ резки хрупких неметаллических материалов
Способ и устройство создания преднамеренных помех
Способ пеленгации радиосигналов и пеленгатор для его осуществления
Способ и устройство управления потоками данных распределенной информационной системы
Способ и устройство определения координат источников радиоизлучений
Способ и устройство определения координат объектов

