Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматической и автоматизированной классификации морских объектов, применительно к гидролокационным станциям ближнего действия.
Известна навигационная гидроакустическая станция освещения ближней обстановки по патенту РФ №2225991, которая содержит антенну, коммутатор приема передачи, тракт предварительной обработки, генераторное устройство, первую цифровую вычислительную машину, вторую вычислительную цифровую машину, тракт измерения скорости звука и цифроаналоговый тракт прослушивания.
Классификация в этой станции осуществляется оператором по информации, выводимой на индикатор.
Наиболее близким аналогом предлагаемой изобретения является «Система автоматической классификации гидролокатора ближнего действия» по патенту РФ №2465618, которая содержит последовательно соединенные антенну, коммутатор приема-передачи и задающий генератор, индикатор, процессор цифровой многоканальной обработки и обнаружения сигналов; блок управления, процессор классификации, блок корректировки автоматического решения и блок формирования решения оператора.
Недостатком рассматриваемой системы классификации являются возможность классификации только одной цели, ограниченные возможности при длительном наблюдении за целью и ограниченные возможности по числу одновременно классифицируемых целей.
В системе автоматической классификации по патенту №2465618, как и в системах классификации всех существующих гидролокационных станций, классификационные признаки измеряют по принятому эхо-сигналу. При этом за цикл излучение - прием может быть принято несколько эхо-сигналов от различных целей. Оператор выбирает конкретную цель, после чего измеряются классификационные признаки именно этой цели на следующем зондирующем сигнале. За время между излучением зондирующих сигналов за счет собственного движения и движения цели эхо-сигнал от цели может быть не обнаружен и контакт с целью может быть потерян. Для исключения этого используются системы автоматического сопровождения. Имеются различные методы автоматического сопровождения обнаруженной цели, но в основном на каждом цикле излучение - прием измеряют координаты цели, параметры движения цели, прогнозируют положение цели, измеряют координаты величины ошибки, после чего перемещают характеристику направленности в новое положение по пространству. (А.С. Колчеданцев. «Гидроакустические станции». Судостроение. Л. 1982, с. 116. «Справочник по гидроакустике». Судостроение. Л. 1988 г., с.24). Поскольку все системы обработки и отслеживания работают с ошибками, то новое ожидаемое положение цели так же имеет ошибки, что сказывается на работе системы классификации.
Техническим результатом предлагаемого изобретения является обеспечение классификации нескольких целей в автоматическом режиме, и автоматическое измерение классификационных признаков при длительном движении классифицируемых целей в процессе работы и сопровождении при изменении режимов движения.
Для достижения указанного технического результата в известную систему автоматической классификации гидролокатора ближнего действия, содержащую последовательно соединенные антенну, коммутатор приема-передачи, приемное устройство, процессор цифровой многоканальной обработки и обнаружения сигналов, индикатор, также содержащую блок решения оператора, выход которого соединен со вторым входом индикатора, блок корректировки автоматического решения, выход которого соединен со входом процессора классификации, блок управления, первый выход которого соединен со вторым входом приемного устройства, а второй выход соединен со входом задающего генератора, выход которого соединен со вторым входом коммутатора, введены новые признаки, а именно: блок определения координат зоны эхо-сигнала, блок формирования строба по времени и пространству, блок определения границ выхода эхо-сигнала из строба, блок выбора массива для классификации, при этом второй выход процессора цифровой многоканальной обработки и обнаружения сигналов соединен двухсторонней связью с блоком выбора массива для классификации и через блок определения границ выхода из строба, соединенный с первым входом блока формирования строба по времени и пространству, второй вход которого соединен с выходом блока определения координат зоны эхо-сигнала, а выход последнего соединен двусторонней связью с третьим входом индикатора, второй выход блока выбора массива для классификации соединен со вторым входом процессора классификации, выход которого соединен с четвертым входом индикатора, а выход блока формирования строба по времени и пространству соединен с вторым входом блока выбора массива для классификации.
Заявляемая система позволяет формировать строб классификации, который находится в фиксированном положении на некотором временном и пространственном интервале. За это время производится измерение классификационных признаков без дополнительных ошибок системы сопровождения и выработка автоматического решения по цели. За время работы может быть сформировано несколько стробов по различным дистанциям и направлениям, каждый из которых работает самостоятельно и независимо друг от друга. Если в одном из стробов будет отсутствовать входная временная информация от любой границы по пространству или по дистанции, то только тогда будет вырабатываться сигнал ошибки и изменяться положение строба после окончания всех измерений в системе классификации. Такая процедура обеспечит получение новой классификационной информации без потери предыдущей классификационной информации, поскольку старое положение строба было известно и новое положение строба тоже известно с точностью до частоты дискретизации.
Сущность предлагаемого изобретения поясняется фиг.1, на которой представлена структурная схема системы автоматической классификации гидролокатора ближнего действия.
Система автоматической классификации гидролокатора ближнего действия (фиг. 1) содержит задающий генератор 3, который через первый выход коммутатора 2 приема-передач связан с антенной 1. Второй выход коммутатора 2 приема-передач через приемное устройство 5 и первый вход процессора 6 цифровой многоканальной обработки и обнаружения эхо-сигналов соединен с первым входом индикатора 12, а второй выход процессора 6 через двухстороннюю связь соединен с первым входом блока 7 выбора массива для классификации. Блок 8 определения границ выхода из строба соединен с первым входом блока 10 формирования строба по времени и пространству, второй вход которого соединен с блоком 11 определения координат зоны эхо-сигнала, а выход блока 11 соединен двусторонней связью со вторым входом индикатора 12. Второй выход блока 7 выбора массива для классификации через процессор 9 классификации соединен с третьим входом индикатора 12, четвертый вход которого соединен с блоком 13 решения оператора. Второй вход процессора 9 классификации соединен с блоком 14 корректировки автоматического решения, а выход блока 10 соединен с третьим входом блока 7 выбора массива.
Блоки антенна, коммутатор, задающий генератор, блок управления, приемное устройство, процессор цифровой многоканальной обработки, процессор классификации, индикатор, блок принятия решения оператором, блок корректировки автоматического решения предлагаемого изобретения используются в прототипе патент РФ №2465618.
Все вновь введенные блоки могут быть реализованы в процессоре классификации 9 так же, как и реализованные там блоки классификации по патенту РФ №2465618.
Цифровые процессоры являются известными устройствами, которые предназначены для осуществления конкретных алгоритмов обработки с использованием аппаратных решений и жесткой логики вычислений. Их применение повышает быстродействие цифровых вычислительных систем в несколько раз, и в большинстве случаев сокращает аппаратные затраты. Описания спецпроцессоров приведены в книге Корякин Ю.А. Смирнов С.А. Яковлев Г.В. «Корабельная гидроакустическая техника». Санкт Петербург. Изд. Наука 2004 г., на стр.281. Там же приведено описание гидроакустических комплексов, построенных на основе спецпроцессоров (стр.296., стр.328). С использованием этих же процессоров могут быть реализованы вновь введенные блоки предлагаемого изобретения
Система автоматической классификации гидролокатора ближнего действия работает следующим образом: блок 4 управления формирует сигнал начала излучения и подает команду задающему генератору 3, где происходит формирование зондирующего сигнала короткой длительности звуковой частоты большой мощности и через коммутатор 2 приема-передачи излучается антенной 1 в водную среду. Одновременно включается работа приемного устройства 5 для обеспечения приема входной информации, которое соответствует излученному зондирующему сигналу. Принятый антенной 1 эхо-сигнал, через коммутатор 2 приема-передачи поступает на приемное устройство 5, и далее в процессор 6 многоканальной цифровой обработки и обнаружения эхо-сигнала, где производится дискретизация принятой входной информации по всем пространственным каналам статического веера характеристик направленности, сформированным в приемном устройстве 5, оптимальная согласованная фильтрация на основе спецпроцессоров БПФ, и последовательная передача цифровых массивов для вывода на индикатор 12. Эти все блоки известны из прототипа, где используются по прямому назначению.
Вопросы, связанные с цифровой обработки сигналов, формирования характеристик направленности, вопросы модуляции и демодуляции, спектральный анализ, а также использование пакетов расширения «Матлаб», которые обеспечивают последовательную процедуру использования алгоритмов, рассмотрены в пособии А.Б. Сергиенко «Цифровая обработка сигналов», Санкт Петербург, 2011 г., стр.655.
На индикаторе 12 отображаются все сигналы, которые были приняты приемным устройством 5 и обработаны процессором 6. Оператор выделяет любые области индикатора, которые он считает целью, и с помощью визира определяет их координаты на момент обнаружения с помощью блока 11 определения координат зоны эхо-сигналов. В качестве координат используется оценка дальности и оценка номера пространственного канала, которые передаются в блок формирования строба по времени и пространству. Эти блоки дублируют цифровые значения положения визира и определяют возможное положение строба на индикаторе. Если имеется заявка на формирование строба по нескольким целям, то должно быть обеспечено отсутствие перекрытия положения друг с другом и определения очередности подключения. Блок 11 фиксирует отображение положения визира на индикаторе и предупреждает оператора от ошибки подключения новой цели на занятое место. Если место освобождается, то отображается разрешение на подключение новой цели и формируются координаты положения строба цели. Кроме того, координаты положения строба зависят от дистанции работы гидролокатора и от ширины зоны обзора. В самом простом случае могут быть использованы координаты эхо-сигналов, обнаруженных автоматическим обнаружителем, которые автоматически фиксируется. Задача блока 8 определения границ выхода из строба заключается в сравнении измеренных координат с положением границ работы по шкале дистанции и по пространству.
Блок 10 формирования строба по времени и по пространству имеет своей целью установить размеры строба по дистанции и по числу пространственных каналов. Это так же определяется шкалой работы и размером освещения пространства. Как правило, размер строба по дистанции можно выбрать равным 10 циклам входной информации с центром в измеренной дистанции, что гарантирует достаточное время для решения задачи классификации. Число пространственных каналов можно выбрать равным 5 с центром в середине пространственного положения цели, что также гарантирует время решения задачи классификации. Размеры строба могут изменяться в зависимости от изменения входной информации по выбранному эхо-сигналу. Сформированные границы строба передаются в блок 7 выбора массива классификации. Этот блок должен выбрать из всего массива, обрабатываемого в процессоре 6, только те цифровые данные, которые находятся в границах одного выбранного строба, и передать их в процессор классификации для обработки и принятия решения. Поскольку время решения задачи классификации существенно меньше, чем время принятия решения задачи обнаружения, и классификация выполняется после окончания цикла излучение-прием, то могут быть обработаны несколько стробов и несколько массивов по нескольким целям, которые могут передаваться последовательно во времени. За время решения задачи классификации может возникнуть ситуация, когда цель выйдет за границы строба. Чтобы этого не случилось, блок 8 определяет границы строба и наличие входной информации в пределах этой границы. Если отсутствуют цифровые отсчеты в пределах границ по дальности или по пространству, то вырабатывается сигнал для перемещения строба на новое место в зависимости от величины отсутствия цифровых отсчетов по дальности и пространству. Сигнал поступает из блока 8 в блок 10 и передвигает положение строба на новое место по этой цели. Изменение положения строба осуществляется после окончания решения задач классификации по всем стробам. Новые координаты строба передаются в блок 10 для идентификации с ранее полученными, при предыдущем стробе.
Таким образом, предложенная система автоматической классификации гидролокатора ближнего действия позволит независимо классифицировать эхо-сигналы от нескольких целей одновременно каждую в своем стробе и более точно измерять классификационные признаки.
Система автоматической классификации гидролокатора ближнего действия, содержащая последовательно соединенные антенну, коммутатор приема - передачи, приемное устройство, процессор цифровой многоканальной обработки и обнаружения сигналов, индикатор, также содержащая блок решения оператора, выход которого соединен со вторым входом индикатора, блок корректировки автоматического решения, выход которого соединен со входом процессора классификации, блок управления первый выход которого соединен со вторым входом приемного устройства, а второй выход соединен со входом задающего генератора, выход которого соединен со вторым входом коммутатора, отличающаяся тем, что введены блок определения координат зоны эхо-сигнала, блок формирования строба по времени и пространству, блок определения границ выхода эхо-сигнала из строба, блок выбора массива для классификации, при этом второй выход процессора цифровой многоканальной обработки и обнаружения сигналов соединен двухсторонней связью с блоком выбора массива для классификации и через блок определения границ выхода из строба, соединенный с первым входом блока формирования строба по времени и пространству, второй вход которого соединен с выходом блока определения координат зоны эхо-сигнала, а выход последнего соединен двусторонней связью с вторым входом индикатора, второй выход блока выбора массива для классификации соединен со вторым входом процессора классификации, выход которого соединен с третьим входом индикатора, а выход блока формирования строба по времени и пространству соединен с вторым входом блока выбора массива для классификации.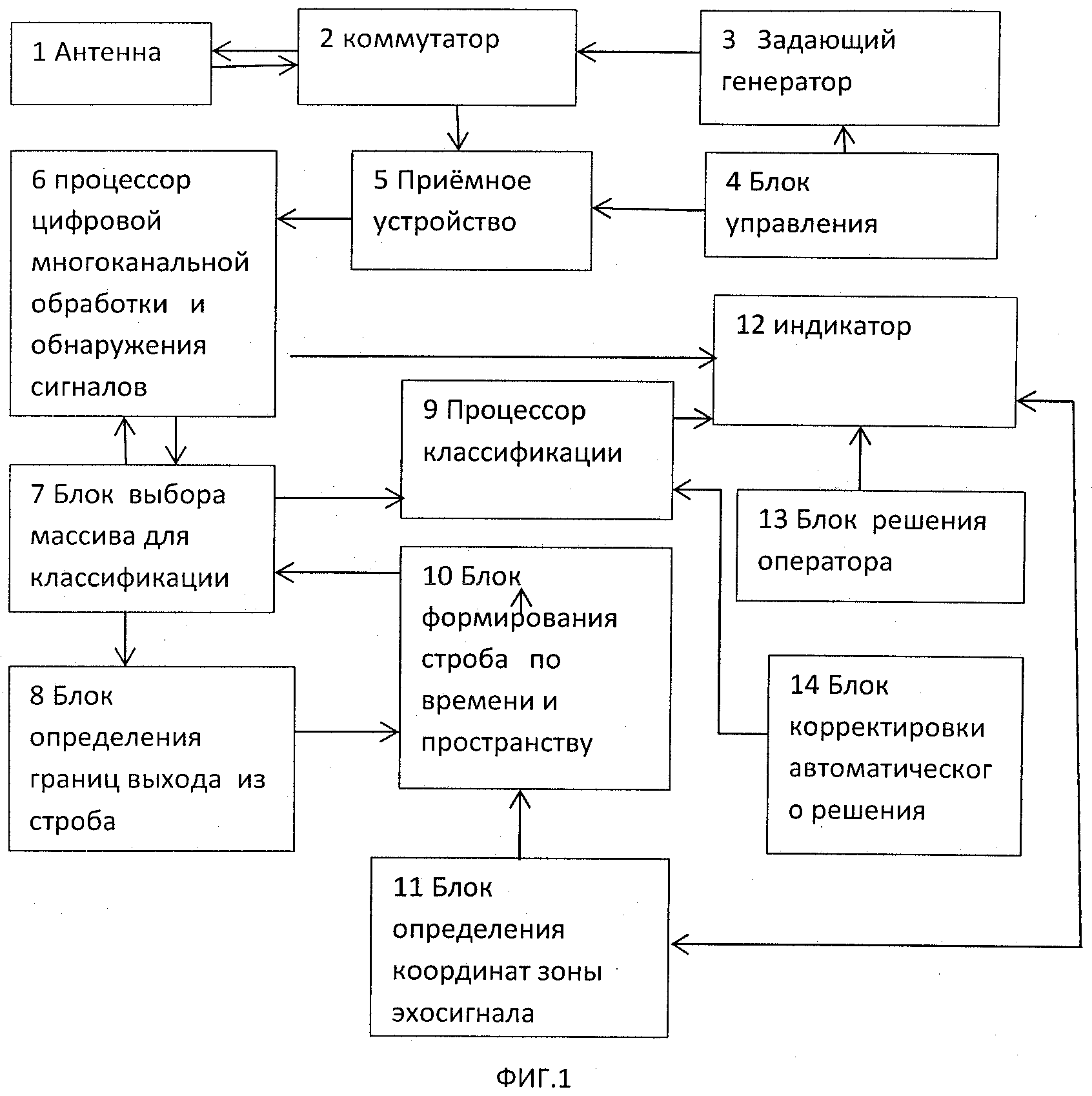
Способ автоматического определения гидролокатором курсового угла обнаруженного объекта
Способ определения дистанции гидролокатором
Неорганический монокристаллический сцинтиллятор
Способ получения опорных плит для обжига керамических изделий
Состав электрода накопителя электроэнергии
Способ изготовления изделия с фильтром для агрессивных жидкостей и газов
Способ автоматического определения параметров айсберга гидролокационным методом
Способ получения полых нагревателей сопротивления на основе углеродкарбидокремниевого материала
Устройство квантовой криптографии (варианты)
Способ получения сульфида галлия (ii)
Способ автоматического определения гидролокатором курсового угла обнаруженного объекта
Способ определения дистанции гидролокатором
Неорганический монокристаллический сцинтиллятор
Способ получения опорных плит для обжига керамических изделий
Состав электрода накопителя электроэнергии
Способ изготовления изделия с фильтром для агрессивных жидкостей и газов
Способ автоматического определения параметров айсберга гидролокационным методом
Способ получения полых нагревателей сопротивления на основе углеродкарбидокремниевого материала
Устройство квантовой криптографии (варианты)
Способ получения сульфида галлия (ii)

