Результат интеллектуальной деятельности: ИМИТАЦИОННО-ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ
Вид РИД
Изобретение
Изобретение относится к радиолокации, может использоваться в имитационно-испытательных комплексах, относящихся к устройствам для исследований, наиболее достоверных для оценки характеристик радиолокационных средств.
Известно устройство для оценки характеристик радиолокационной станции (РЛС) (Леонов А.И. и др. Оценка характеристик. М.:Радио и связь. 1990. с.3, 25.), содержащее цель, пускаемую в зону обзора РЛС по траекториям, заданным программой испытаний и измерительную радиоэлектронную систему, содержащую аппаратуру регистрации, обработки, хранения и анализа результатов исследования, связанную с пунктом управления.
В данном устройстве для обеспечения достоверности измерений требуется большое количество пусков целей по одинаковым траекториям, что затрудняет процесс исследований, является дорогостоящим мероприятием.
Прототипом является комплекс (патент РФ №2400766, G01S 7/40, 25.11. 2008), в котором для создания натурной обстановки в зоне обзора РЛС по заданной программе облета используются цели - самолеты, вертолеты, ракеты или спутники. Комплекс содержит измерительную радиоэлектронную систему и блок регистрации, обработки, анализа и передачи информации в пункт управления для принятия решения по результатам испытаний.
С помощью данного устройства вместо обзора всей зоны обзора РЛС осматривается только сектор, т.е. n-я ее часть, в которой создается радиолокационная обстановка, что приводит при обеспечении достоверности испытаний к сокращению количества пусков цели, однако при использовании самолета необходимо наличие взлетной полосы, для спутников или ракет необходимы дорогостоящие стартовые установки, требуются большие затраты на поддержание технического ресурса, топлива, что приводит к повышению стоимости, усложнению процесса исследования, невозможности использования комплекса для испытаний РЛС на различных местах их дислокации при отсутствии необходимого оборудования, что является недостатком известного технического решения.
Задачей создания изобретения является упрощение, уменьшение стоимости устройства, улучшение условий эксплуатации, транспортирования, обеспечение возможности проведения испытаний РЛС различного типа на местах их дислокации при отсутствии подготовленной технической базы.
Сущность изобретения заключается в том, что имитационно-испытательный комплекс для РЛС, содержащий цель для создания натурной обстановки в зоне обзора по заданной программе облета, в которой пилотажно-навигационная система (ПНС), подключенная к спутниковой навигационной системе (СНС), и измерительное радиоэлектронное устройство связаны с пунктом управления (ПУ), отличается от известных тем, что в нем целью для создания натурной обстановки в зоне обзора по заданной программе облета является беспилотный летательный аппарат (БПЛА) с крылом, оперением, фюзеляжем, двигателем и устройством посадки, снабженный пусковой установкой, на которой установлены толкатель и сбоку со стороны винта двигателя убираемый выдвижной стартер, причем на фюзеляже в нижней его части по продольной оси закреплен упор, контактирующий при взлете с торцевой поверхностью толкателя, а устройство посадки установлено в отсеке, на стенках которого закреплены открывающаяся створка и автоматический замок, с которым соединена открывающаяся створка.
Направляющая пусковой установки, закрепленная на каркасе под углом от 8 до 12 градусов к горизонтальной поверхности, выполнена с продольным по всей длине сквозным пазом, образованным с возможностью размещения в нем упора на фюзеляже, контактирующего с толкателем, закрепленным на нижней части пусковой установки
Стартер установлен на рельсе откидной опоры, закрепленной петлями на направляющей пусковой установки.
Толкатель содержит помещенный в корпусе выдвижной шток с поршнем и пружиной амортизации, контактирующий торцевой поверхностью с упором на фюзеляже, причем корпус выполнен с ограничителем внутри и камерой, сообщающейся с емкостью баллона сжатого воздуха.
Устройство посадки образовано парашютной укладкой, закрепленной стропами через проушину на платформе, прикрепленной с помощью пружины ко дну отсека, причем парашютная укладка выполнена контактирующей с внутренней поверхностью створки, замок содержит размещенный в нише отсека штырь, соединенный с соленоидом, связанным с программным блоком управления, а створка, закрепленная шарнирно на оси стенки отсека, выполнена со стороны соединения с замком загнутой, причем в этой части образовано отверстие для прохождения штыря.
Для транспортирования беспилотный летательный аппарат и пункт управления содержат средства передвижения повышенной проходимости, а пусковая установка выполнена с колесами и прицепом.
Использование в качестве цели для создания натурной обстановки в зоне обзора по заданной программе облета БПЛА, выполненного с упором на фюзеляже, при нажатии на который толкателем пусковой установки создается дополнительный силовой импульс при взлете, позволяет исключить необходимость использования взлетной полосы, сложного дорогостоящего оборудования, приводит к сокращению расходов на техническое обслуживание, топливо. Техническим результатом является упрощение и уменьшение стоимости испытаний, улучшение условий эксплуатации и транспортирования, обеспечение исследований РЛС различного типа на местах дислокации при отсутствии необходимого оборудования.
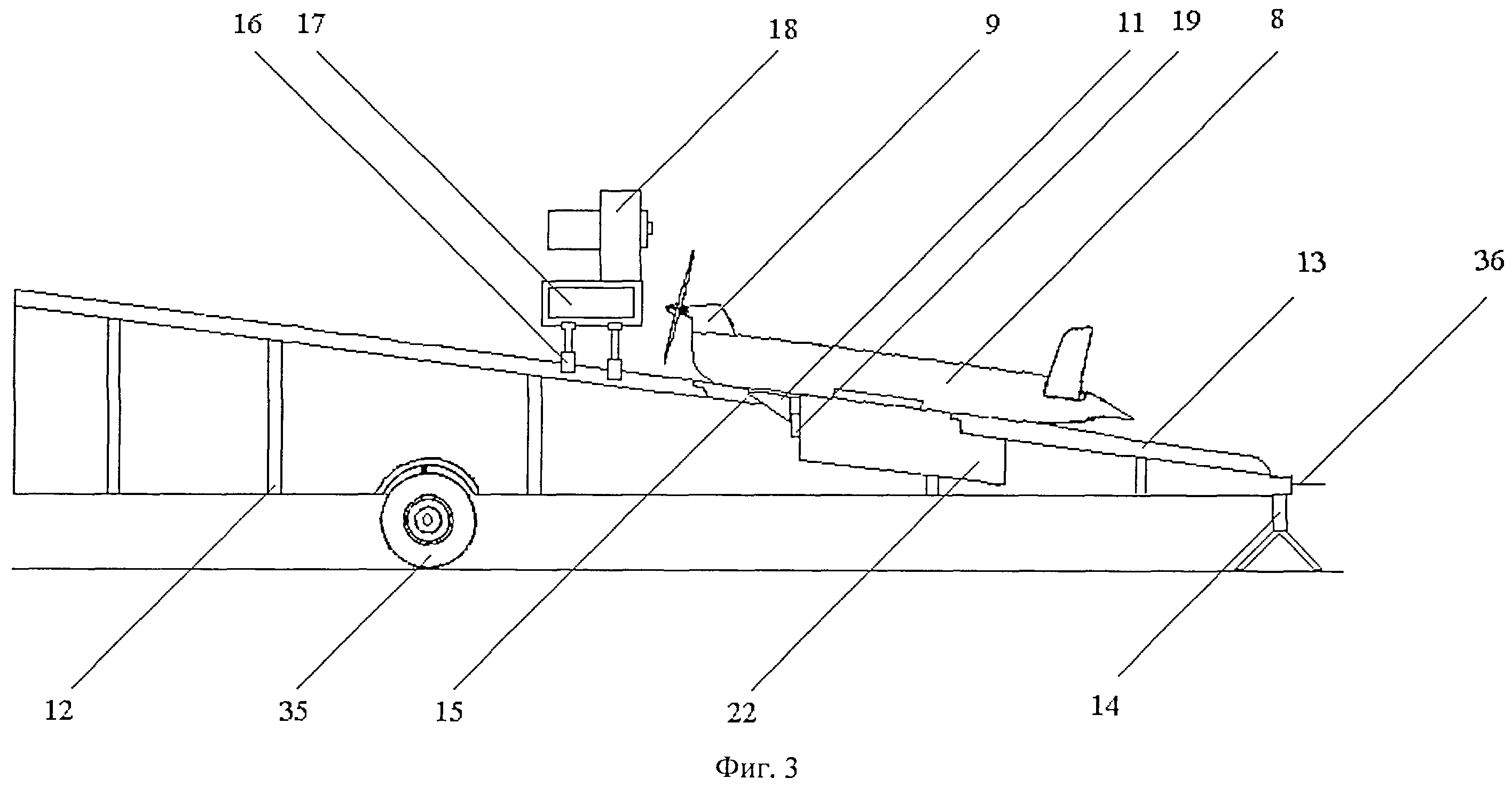
Изобретение представлено на чертежах: на фиг.1 приведена функциональная схема работы устройства, на фиг.2 представлен вид на БПЛА сверху, на фиг.3 изображена пусковая установка, на фиг.4 - конструкция толкателя в разрезе, на фиг.5 приведен вид на БПЛА сбоку.
В предложенном комплексе целью для создания натурной обстановки в зоне обзора РЛС 1 по заданной программе облета является БПЛА, на борту которого установлены подключенная к спутниковой навигационной системе СНС 3 (использована GP535-HVS) ПНС 2 и измерительное радиоэлектронное устройство 4, связанные с ПУ 5.
БПЛА представляет собой планер с крылом 6, оперением 7, фюзеляжем 8 и поршневым 2-х тактовым двигателем 9 внутреннего сгорания КА-125, установленным на выступающей раме, которая является частью конструкции обтекателя фюзеляжа 8. Топливный бак размещен в задней части фюзеляжа 8. Органы управления установлены на оперении 7 и крыле 6. ПНС 2 закреплена в средней части фюзеляжа 8 под отсеком 10, в котором размещено устройство посадки. Измерительная система 4 размещена в носовой части фюзеляжа. Антенны радиоаппаратуры установлены в частях фюзеляжа 8, выполненных с радиопрозрачным покрытием.
На фюзеляже 8 в нижней части по продольной оси закреплен с помощью эпоксидного клея ABRO упор 11, контактирующий с толкателем пусковой установки в стартовом положении БПЛА.
Планер изготовлен из углестеклопластика - композитного материала, обеспечивающего максимальную кратность применения, технологичность, минимальные массу и стоимость конструкции.
Пусковая металлическая установка /изделие Е10П000000.000/ представляет собой каркас 12 со стойкой 14, на котором установлена направляющая 13, наклонная под углом от 8 до 12 градусов к горизонтальной поверхности. Величина угла наклона направляющей 13 является оптимальной для выполнения взлета БПЛА, что определено опытным путем.
Направляющая 13 выполнена с продольным по всей длине сквозным пазом 15, в котором размещен в стартовом положении БПЛА упор 11, контактирующий с толкателем 19.
На направляющей 13 сбоку со стороны винта двигателя 9 с помощью петель 16 установлена опора 17 в виде рамы, на рельсе (на чертеже не показан) которой установлен стартер 18.
Толкатель состоит из штока 19 с поршнем 20 и пружиной амортизации 21, помещенного в корпусе 22, который выполнен с ограничителем 23 и камерой 24, сообщающейся с емкостью баллона сжатого воздуха (на чертеже не показан). Корпус 22 закреплен в нижней части направляющей 13 так, что обеспечивается контактирование торцевой поверхности штока 19 с упором 11, размещенным в пазу 15 направляющей 13.
Устройство посадки представляет собой парашютную укладку 25, закрепленную в отсеке 10 средней верхней части фюзеляжа 8, контактирующую с внутренней поверхностью открывающейся створки 26. Парашютная укладка 25 закреплена стропами 27 через проушину 28 к платформе 29, которая с помощью пружины 30 прикреплена ко дну отсека 10. Створка 26, закрепленная шарнирно на оси 31 стенки отсека 10, соединена с замком, установленным на стенке, противоположной креплению оси 31. Замок состоит из установленного в нише отсека штыря 32, который присоединен к соленоиду 33, подключенному к программному блоку ПУ 5. Створка 26 со стороны соединения с замком выполнена загнутой, в этой части образовано отверстие 34 для прохождения штыря 32.
Для перемещения БПЛА и ПУ 5 комплекс снабжен транспортными средствами повышенной проходимости (на чертеже не показаны).
Транспортная машина для БПЛЛ выполнена с ложементом для съемного крепления объекта. Для транспортирования пусковой установки каркас ее выполнен с колесами 35 и прицепом 36.
Пункт управления 5 является наземным, передвижным, оборудование его размещено в кузове автомобиля повышенной проходимости. Пульт управления оператора, рабочее место которого находится в автомобиле, снабжен персональной ЭВМ. Управление полетом и посадкой БПЛА осуществляется программным блоком ПНК "Взлет", выполненным на микросхемах Spartan 3A-ХС3C 700А3A-ХС3С 700 A. Предстартовый контроль, управление запуском двигателя 9 и взлетом БПЛА производятся дистанционно по команде оператора, передаваемой сотрудникам обслуживающего персонала по телефону или радиоприемнику УКВ. Баллоны сжатого воздуха со шлангом находятся в кузове автомобиля ПУ 5, подкачка производится от компрессора из состава комплекса (на чертеже не показаны).
В предложенном комплексе испытания по оценке характеристик РЛС проводятся следующим образом: на выбранную площадку транспортируют БПЛА, ПУ 5 и пусковую установку. По команде оператора, переданной по телефону, сотрудники устанавливают БПЛА на направляющую 13, причем упор 11 на фюзеляже 8 находится в пазу 15 направляющей, а опора 17 стартера 18, закрепленная шарнирно сбоку вблизи винта двигателя 9, находится в вертикальном положении на направляющей 13. По следующей очередной команде оператора сотрудники перемещают стартер 18 по рельсу опоры 17, подсоединяя его механически к валу двигателя. После запуска двигателя 9 стартер 18 отключают от работы, отодвигают его по рельсу опоры 17 в исходное положение, затем опору 17 поворачивают вниз для освобождения направляющей 13. После прогрева двигателя 9 по команде оператора двигатель включают в режим увеличения оборотов, необходимый для взлета БПЛА. После появления на ЭВМ информации о полученном числе оборотов, необходимых для взлета, оператор подает команду на приведение в действие толкателя пусковой установки. Корпус 22 через штуцер и шланг подсоединяют к баллону сжатого воздуха, при поступлении которого в камеру 24 шток 19 под действием давления перемещается. При нажатии штока 19 на упор 11 в режиме взлета создается дополнительный силовой импульс. На заданной высоте соответственно программе испытаний осуществляется переход работы двигателя на крейсерский режим. В зоне обзора РЛС перемещение БПЛА осуществляется по траектории, соответствующей заданной программе облета.
Посадка БПЛА производится в автоматическом режиме программного блока путем передачи сигнала на соленоид 33, при сжатии которого штырь 32 перемещается в нишу отсека 10, освобождая отверстие 34. Освобожденная створка 26 под воздействием воздушного потока начинает открываться. При открытии створки поджатая пружиной 30 платформа 29 выталкивает парашютную укладку 10, под давлением которой створка 26 полностью открывается. После раскрытия малого и основного парашютов происходит посадка БПЛА на заданную площадку с учетом ветрового сноса.
После завершения облетов в заданном секторе углов места данные действительных координат БПЛА и по сигналам РЛС поступают в измерительное устройство 4, в котором осуществляется обработка, сравнение и хранение информации, передаваемая в пункт управления 5 для принятия решения по оценке характеристик исследуемого объекта.
Упрощенная конструкция с использованием беспилотного летательного аппарата, простота в эксплуатации и транспортировании позволяют применять предложенный комплекс для исследований с обеспечением высокоточной и надежной информации при измерениях характеристик радиолокационных средств.
Способ построения расчетных зон затенения управляемым перебором элементов матрицы высот рельефа
Устройство для приема двоичной информации по двум параллельным каналам связи
Способ юстировки радиолокационных станций
Устройство синхронного приема двоичной информации по дублирующим каналам связи
Способ юстировки радиолокационных станций системы автоматического управления
Устройство для приема информации с повышенной достоверностью
Способ для приема информации по двум параллельным каналам
Устройство защиты от ошибок
Устройство для приема информации по двум параллельным каналам связи
Способ формирования текущего энергетического спектра выходного сигнала приемника, устройство для его осуществления и способ измерения дальности
Способ построения расчетных зон затенения управляемым перебором элементов матрицы высот рельефа
Устройство для приема двоичной информации по двум параллельным каналам связи
Способ юстировки радиолокационных станций
Устройство синхронного приема двоичной информации по дублирующим каналам связи
Способ юстировки радиолокационных станций системы автоматического управления
Устройство для приема информации с повышенной достоверностью
Способ для приема информации по двум параллельным каналам
Устройство защиты от ошибок
Устройство для приема информации по двум параллельным каналам связи
Способ формирования широкоугольной зоны сканирования антенной системы с электронным управлением лучом

