Результат интеллектуальной деятельности: ПРИВОД ВЕРТИКАЛЬНОГО НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к системам автоматического управления и регулирования, в частности к приводам вертикального наведения стабилизатора танкового вооружения (далее - стабилизатор).
Известен стабилизатор танкового вооружения 2Э42-4, привод вертикального наведения (ВН) которого выполнен по схеме электрической принципиальной БС 1.370.012 Э3 и описанный в БС 1.370.012 ТО, ТУ. Привод ВН данного стабилизатора принят за прототип.
(См. также книгу В.В. Корнеева, М.И. Кузнецова и др. «Основы автоматики и танковые автоматические системы» - М.: Министерство обороны, 1976 г., издание Академии бронетанковых войск имени маршала Малиновского Р.Я.)
Привод ВН стабилизатора-прототипа представляет собой электрогидравлический привод ВН (ГП) 12, выполненный на базе питающей установки с гидронасосом (Н) 8, который работает в паре с исполнительным гидроцилиндром (ЦИ) 11 с встроенным в него механизмом управления (МУ) 10, электрически связанным через собственные обмотки управления (ОУ 1) 9 с первым усилителем ВН (У-ВН1) 6 блока управления (БУ) 5, также включает в себя установленную на башне 14 пушку 13 с закрепленным на ней датчиком абсолютной угловой скорости по ВН (ДУС-ВН) 15, причем цилиндр исполнительный гидропривода ВН (ЦИ) 11 механически связан с пушкой 13 и башней 14 и гидравлически с насосом гидропривода ВН (Н) 8, приводной электродвигатель (ЭД) 7 насоса гидропривода ВН (Н) 8 механически связан с насосом гидропривода ВН (Н) 8, пульт управления по ВН (ПУВН) 1, задающее устройство стабилизации с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН (ЗУС) 2, электрически связанное с пультом управления по ВН (ПУВН) 1, внешние устройства 3, электрически связанные с задающим устройством стабилизации с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН (ЗУС) 2, блок управления (БУ) 5 и аналоговый модуль управления 4 блока управления (БУ) 5, который обрабатывает сигналы, поступающие с внешних устройств 3, задающего устройства стабилизации по ВН (ЗУС) 2 привода ВН и датчика абсолютной угловой скорости по ВН (ДУС-ВН) 15, при этом одни сигналы по командам от внешних устройств 3 поступают на вход приводного электродвигателя (ЭД) 7 насоса гидропривода ВН (Н) 8, а другие через усилитель ВН (У-ВН1) 6 на обмотки управления (ОУ1) 9 механизма управления (МУ) 10 исполнительного гидроцилиндра (ЦИ) 11.
Постоянство расхода (производительность) питающей установки гидропривода определяется механической характеристикой приводного электродвигателя, вращающего вал гидронасоса питающей установки.
Привод ВН стабилизатора, принятого за прототип, представляет собой автономный привод, обеспечивающий наведение и стабилизацию основного вооружения танка в плоскости ВН по сигналам, поступающим с задающего устройства стабилизации (ЗУС) 2 и датчика абсолютной угловой скорости (ДУС-ВН) 15, а также сигналам, поступающим от внешних устройств 3.
Принципы работы привода ВН в режиме стабилизации и стабилизированного наведения во многом схожи. Привод ВН представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Рассмотрим в отдельности режимы работы привода ВН.
Режим стабилизации по ВН - режим стабилизация пушки по ВН осуществляется относительно сигнала датчика положения (угла) зеркала по ВН (ЗУС) 2, имеющего независимую стабилизацию зеркала в плоскости ВН, что обеспечивается гиростабилизатором (ЗУС) 2.
При движении танка по пересеченной местности на пушку 13 действуют внешние возмущения в виде колебаний корпуса танка, трения в цапфах (опорах) пушки 13, трения в исполнительном цилиндре (ЦИ) 11 гидропривода ВН (ГП) 12, а также возмущения, обусловленные неуравновешенностью пушки 13 относительно оси цапф.
Эти возмущения вызывают отклонение пушки 13 от заданного сигналом датчика положения (угла) зеркала по ВН (ЗУС) 2 направления. Угол между заданным и действительным направлением пушки 13 в вертикальной плоскости в этом случае определяет ошибку стабилизации привода ВН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается штоком исполнительного цилиндра (ЦИ) 11 гидропривода ВН (ГП) 12 стабилизатора, поворачивающим пушку 13 в сторону уменьшения ошибки по ВН.
Полученная таким образом ошибка стабилизации привода ВН обрабатывается аналоговым модулем управления 4 блока управления (БУ) 5 стабилизатора, одни сигналы с которого, по командам от внешних устройств 3, управляют включением приводного электродвигателя (ЭД) 7 гидронасоса (Н) 8 гидропривода ВН (ГП) 12, создающего рабочее давление на входе механизма управления (МУ) 10 исполнительного гидроцилиндра (ЦИ) 11 гидропривода ВН (ГП) 12, а другие сигналы через усилитель ВН (У-ВН1) 6 поступают на обмотки управления (ОУ1) 9 механизма управления (МУ) 10 исполнительного гидроцилиндра (ЦИ) 11, создающего разность давлений в полостях исполнительного гидроцилиндра (ЦИ) 11, перемещая шток исполнительного цилиндра (ЦИ) 11, тем самым обеспечивая поворот пушки 13 в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения (угла) зеркала по ВН (ЗУС) 2 и истинным положениями пушки 13 в плоскости ВН.
Для повышения устойчивости привода ВН и как следствие получения заданной ошибки стабилизации в контур управления привода ВН стабилизатора введена обратная связь по абсолютной угловой скорости пушки 13 в плоскости ВН с (ДУС ВН) 15, обрабатываемая аналоговым модулем управления 4 блока управления (БУ) 5.
Режим стабилизированного наведения по ВН - режим стабилизированного наведения пушки 13 по ВН - осуществляется также по сигналу с датчика положения (угла) зеркала по ВН (ЗУС) 2. При обнаружение цели наводчик пультом управления (ПУВН) 1 наводит стабилизированную в плоскости ВН линию визирования (прицельную марку) (ЗУС) 2 на цель в плоскости ВН. Сигнал с датчика положения (угла) зеркала по ВН (ЗУС) 2, пропорциональный ошибке стабилизации по ВН, поступает на вход (БУ) 5, где происходит его преобразование, как описано выше. Гидропривод ВН (ГП) 12 поворачивает пушку 13 в сторону уменьшения ошибки по ВН, аналогично рассмотренному выше режиму стабилизации в плоскости ВН.
Другие сигналы с внешних устройств 3, связанные с (ЗУС) 2 и (ПУВН) 1, представляют собой сигналы с комплекса приборов и узлов, входящих как в стабилизатор, так и в оборудование танка в целом.
Недостатками вышеуказанной конструкции привода ВН стабилизатора-прототипа являются:
- отсутствует возможность получения более высоких показателей по точности стабилизации пушки в плоскости ВН, обусловленная отсутствием дополнительных обратных связей;
- отсутствует возможность парирования (предупреждения) высокодинамичных ударов пушки по верхнему и нижнему упорам, ограничивающим углы прокачки пушки в плоскости ВН, при движении танка по пересеченной местности с большими положительными и отрицательными углами тангажа (большими, чем углы прокачки пушки по ВН). Это обстоятельство не позволяет уменьшить время нестабилизированного состояния пушки при ее соударении с упорами даже при наличии режима ее гидростопорения после отскока от упоров, что также отрицательно сказывается на точности стабилизации вооружения по ВН;
- отсутствует возможность получения максимальной скорости отработки гидроприводом ВН скоростей более 27°/с, что недостаточно при движении танка по пересеченной местности с резкими отклонениями шасси (корпуса) танка в вертикальной плоскости, определяемых профилем трассы, по которой движется танк;
- низкий КПД гидропривода ВН в целом, потребляющего значительный ток при отсутствии наведения и динамической стабилизации пушки по ВН;
- использование аналоговых контуров коррекции и управления приводом ВН, не позволяющих применять адаптивные и оптимальные алгоритмы управления, гибко (без значительной переделки аналогового модуля управления БУ) менять его параметры при изменении механических параметров танка в процессе его эксплуатации.
- отсутствие цифровых информационных каналов обмена с внешними устройствами танка не позволяет повысить эксплуатационные характеристики привода ВН стабилизатора, точность его диагностики, настройку привода ВН и возможность его установки на другие танки без существенной доработки. Отсутствие цифровых информационных каналов обмена одновременно не позволяет получить и дополнительные сигналы с датчиковой аппаратуры танка (внешних устройств), что также не дает возможность включения этих сигналов в контур управления приводом ВН стабилизатора в виде дополнительных обратных связей, а значит, не позволяет поднять устойчивость и добротность контура управления привода ВН, тем самым исключая возможность повышения точности стабилизации вооружения.
Техническими задачами заявляемого изобретения являются:
- повышение точности стабилизации привода ВН стабилизатора;
- уменьшение времени нестабилизированного состояния пушки;
- повышение скорости отработки гидропривода ВН стабилизатора;
- повышение КПД гидропривода ВН стабилизатора;
- повышение эксплуатационных показателей стабилизатора с новым приводом ВН, а с ним и объекта военного назначения (далее по тексту - ОВН);
- повышение эксплуатационной интероперабельности привода ВН стабилизатора.
Для достижения указанного технического результата в известный привод ВН стабилизатора танкового вооружения, содержащий установленную на башне пушку с закрепленным на ней датчиком абсолютной угловой скорости по ВН, цилиндр исполнительный гидропривода ВН, механически связанный с пушкой и башней и гидравлически с насосом гидропривода ВН, механизм управления цилиндра исполнительного гидропривода ВН, электрически связанного через собственные первые обмотки управления с первым усилителем ВН блока управления, приводной электродвигатель насоса гидропривода ВН, механически связанный с насосом гидропривода ВН, пульт управления по ВН, задающее устройство стабилизации с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН, электрически связанное с пультом управления по ВН, внешние устройства, электрически связанные с задающим устройством стабилизации с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН, блок управления, согласно изобретению дополнительно введены:
- измеритель угловых ускорений башни в плоскости ВН;
- датчик положения пушки в плоскости ВН;
- усилитель мощности приводного электродвигателя насоса гидропривода ВН;
- датчик скорости вращения вала приводного электродвигателя насоса гидропривода ВН;
- вторые обмотки управления механизма управления цилиндра исполнительного гидропривода ВН;
- первый и второй датчики давления цилиндра исполнительного гидропривода ВН,
кроме того, в блок управления дополнительно введены:
- модуль цифрового обмена;
- модуль цифрового управления и обработки;
- второй усилитель ВН,
при этом внешние устройства электрически связаны через цифровые каналы информационного взаимодействия с датчиком положения пушки в плоскости ВН и модулем цифрового обмена, электрически связанного в свою очередь также через цифровые каналы информационного взаимодействия с модулем цифрового управления и обработки блока управления,
измеритель угловых ускорений башни в плоскости ВН механически связан с башней, ось чувствительности которого параллельна оси цапф пушки,
датчик положения пушки в плоскости ВН механически связан с башней и пушкой по ВН, причем указанные датчик положения пушки в плоскости ВН, измеритель угловых ускорений башни в плоскости ВН, датчик абсолютной угловой скорости по ВН, усилитель мощности приводного электродвигателя насоса гидропривода ВН, первый и второй датчики давления цилиндра исполнительного гидропривода ВН электрически связаны с модулем цифрового управления и обработки блока управления,
при этом с одной стороны усилитель мощности приводного электродвигателя насоса гидропривода ВН электрически связан с бортсетью ОВН, приводным электродвигателем насоса гидропривода ВН и датчиком скорости вращения вала приводного электродвигателя насоса гидропривода ВН, механически связанным с приводным электродвигателем насоса гидропривода ВН,
с другой стороны первый и второй выходы модуля цифрового управления и обработки электрически связаны с первым и вторым усилителями ВН блока управления, электрически связанными в свою очередь с первой и второй обмотками управления механизма управления, задающего направление движения штока исполнительного цилиндра в плоскости ВН, тем самым обеспечивая поворот пушки в сторону уменьшения ошибки в плоскости ВН.
Сопоставительный анализ с прототипом показывает, что заявляемый стабилизатор танкового вооружения отличается наличием новых элементов, а именно:
- измерителя угловых ускорений башни в плоскости ВН;
- датчика положения пушки в плоскости ВН;
- усилителя мощности приводного электродвигателя насоса гидропривода ВН;
- датчика скорости вращения вала приводного электродвигателя насоса гидропривода ВН;
- вторых обмоток управления механизма управления цилиндра исполнительного гидропривода ВН;
- первого и второго датчика давления цилиндра исполнительного гидропривода ВН,
- модуля цифрового обмена;
- модуля цифрового управления и обработки;
- второго усилителя ВН блока управления,
и их связями с другими элементами стабилизатора и ОВН.
Изобретение позволяет за счет применения новых приборов и датчиков, построенных на цифровой платформе, значительно расширить совместно с системой управления огнем (СУО) возможности боевого применения танка, поднять его боевую мощь, надежность, живучесть, улучшить его технические и эксплуатационные характеристики, что очень важно при работе экипажа в реальных боевых условиях.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в привод ВН стабилизатора танкового вооружения позволяет:
- повысить точность стабилизации привода ВН за счет введения в контур управления приводом ВН стабилизатора дополнительных сигналов обратных связей с датчиковой аппаратуры и усилителя мощности приводного электродвигателя насоса гидропривода ВН, получаемых по цифровым информационным каналам обмена, что позволяет поднять устойчивость и добротность контуров управления приводом ВН. Это дает возможность в сумме с новым механизмом управления цилиндра исполнительно гидропривода ВН повысить точность стабилизации по ВН не менее чем на 30-35%;
- уменьшить время нестабилизированного состояния пушки за счет вычисления положения упоров по сигналам датчика положения пушки по ВН с учетом относительной скорости движения пушки и своевременного включения и выключения режимов торможения и гидростопорения цилиндра исполнительного гидропривода ВН;
- повысить скорость отработки гидропривода ВН за счет введения в его состав нового механизма управления цилиндра исполнительного со вторыми (дополнительными) обмотками управления и управляемого приводного электродвигателя, позволяющего изменять производительность насоса по командам от блока управления привода ВН стабилизатора;
- повысить КПД гидропривода ВН за счет наличия в его составе управляемого от усилителя мощности приводного электродвигателя, что позволяет регулировать его обороты в соответствии с условиями работы ОВН;
- повысить эксплуатационные показатели стабилизатора с новым приводом ВН за счет введения в блок управления модуля цифрового управления и обработки, что в сумме с цифровыми контурами управления и коррекции позволяет применить адаптивные и оптимальные алгоритмы управления приводом ВН стабилизатора, гибко менять его параметры при изменении внешних условий и механических параметров ОВН в процессе его эксплуатации;
- повысить эксплуатационную интероперабельность привода ВН стабилизатора за счет наличия в его структуре цифрового информационного канала обмена с модулем цифрового управления и обработки блока управления, что позволяет резко повысить эксплуатационные характеристики привода ВН и возможность его интегрирования в другие стабилизаторы, имеющие соответствующие информационные каналы обмена, без существенной доработки.
На фиг.1 приведена заявляемая структурная схема привода ВН стабилизатора танкового вооружения.
Сокращения, принятые в тексте, на фиг.1
БУ - блок управления;
ГП - гидропривод ВН;
ДУС-ВН - датчик абсолютной угловой скорости по ВН;
ДПП - датчик положения пушки по ВН;
ДД1 - первый датчик давления цилиндра исполнительного гидропривода ВН;
ДД2 - второй датчик давления цилиндра исполнительного гидропривода ВН;
ДС - датчик скорости вращения вала приводного электродвигателя гидропривода ВН;
ЗУС - задающее устройство стабилизации с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН;
ИУУ - измеритель (датчик) угловых ускорений башни в плоскости ВН;
МУ - механизм управления цилиндра исполнительного гидропривода ВН;
Н - гидронасос гидропривода ВН;
ОВН - объект военного назначения;
ОСС-ЭД - обратная связь по скорости вращения вала приводного электродвигателя гидропривода ВН;
ОСТ-ЭД - обратная связь по току приводного электродвигателя гидропривода ВН;
ОУ1 - первые обмотки управления цилиндра исполнительного гидропривода ВН;
ОУ2 - вторые обмотки управления цилиндра исполнительного гидропривода ВН;
ПУВН - пульт управления по ВН;
У-ВН1 - первый усилитель ВН блока управления;
У-ВН2 - второй усилитель ВН блока управления;
УМ - усилитель мощности гидропривода ВН;
Упр.ω-ЭД - управление скоростью вращения вала приводного электродвигателя гидропривода ВН;
ЦИ - цилиндр исполнительный гидропривода ВН;
ЭД - приводной электродвигатель гидропривода ВН;
ε башни по ВН - сигнал, пропорциональный ускорению башни в плоскости ВН.
Привод ВН стабилизатора вооружения ОВН представляет собой автономно работающий привод наведения и стабилизации пушки в плоскости ВН.
Заявляемый привод вертикального наведения и стабилизации стабилизатора вооружения ОВН (фиг.2) содержит пульт управления (ПУВН) 1, задающее устройство стабилизации (ЗУС) 2 с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН, электрически связанное соответственно с внешними устройствами 3 и с пультом управления (ПУВН) 1. Внешние устройства 3 электрически связаны через информационные каналы обмена с входом модуля цифрового обмена 4, блока управления (БУ) 5 и с датчиком положения пушки по ВН (ДПП) 6.
Полученные и обработанные модулем цифрового обмена 4 сигнал ошибки привода ВН, сигнал угловой скорости цели по ВН (формируется внешними устройствами 3 совместно с (ЗУС) 2 при наведении вооружения на цель по ВН) и сигнал датчика положения пушки по ВН (ДПП) 6 поступают на вход модуля цифрового управления и обработки 7.
Полученные модулем цифрового управления и обработки 7 сигнал ошибки привода ВН, сигнал угловой скорости цели по ВН и сигнал датчика положения пушки по ВН (ДПП) 6 обрабатываются в нем по заданному алгоритму с последующим суммированием с сигналами положительных и отрицательных обратных связей с первого (ДД1) 9 и второго (ДД2) 10 датчиков давления цилиндра исполнительного (ЦП) 11 гидропривода ВН (ГП) 8, сигналом с датчика абсолютной угловой скорости по ВН (ДУС-ВН) 12, сигналом с измерителя (датчика) угловых ускорений (ИУУ) 13 башни в плоскости ВН и сигналами по току и скорости приводного электродвигателя (ЭД) 14 гидропривода ВН (ГП) 8, формируемых соответственно усилителем мощности (УМ) 15 и датчиком скорости (ДС) 16, механически связанным с валом насоса (Н) 17 гидропривода ВН (ГП) 8, приводимым во вращение валом приводного электродвигателя (ЭД) 14 гидропривода ВН (ГП) 8.
Полученные, таким образом, на первом и втором выходах модуля цифрового управления и обработки 7 сигналы представляют собой слаботочные сигналы управления для первой (ОУ1) 18 и второй (ОУ2) 19 обмоток управления механизма управления (МУ) 20 цилиндра исполнительного (ЦИ) 11 гидропривода ВН (ГП) 8.
Слаботочные сигналы управления первой (ОУ1) 18 и второй (ОУ2) 19 обмотками управления механизма управления (МУ) 20 цилиндра исполнительного (ЦИ) 11 гидропривода ВН (ГП) 8 с первого и второго выходов модуля цифрового управления и обработки 7 поступают на соответствующие входы первого (У-ВНГ) 21 и второго (У-ВН2) 22 усилителей ВН блока управления (БУ) 5, где происходит их усиление до значений, достаточных для управления первой (ОУ1) 18 и второй (ОУ2) 19 обмотками управления механизма управления (МУ) 20 цилиндра исполнительного (ЦИ) 11.
Полученные, таким образом, сигналы управления на первом и втором выходах модуля цифрового управления и обработки 7 через первый (У-ВН1) 21 и второй (У-ВН2) 22 усилители ВН блока управления (БУ) 5 поступают соответственно на первую (ОУ1) 18 и вторую (ОУ2) 19 обмотки управления механизма управления (МУ) 20 цилиндра исполнительного (ЦИ) 11. Насос (Н) 17 гидропривода ВН (ГП) 8 создает поток рабочей жидкости на входе механизма управления (МУ) 20 цилиндра исполнительного (ЦИ) 11, обеспечивающего при помощи первой (ОУ1) 18 и второй (ОУ2) 19 обмоток управления распределение потока рабочей жидкости в зависимости от выработанных блоком управления (БУ) 5 сигналов, обеспечивая тем самым, изменение направление движения штока по ВН цилиндра исполнительного (ЦИ) 11, поворачивающего пушку 23, а с ней и вал датчика положения пушки (ДПП) 6, закрепленный на башне 24 в плоскости ВН.
Датчик положения (угла) независимо стабилизированного инерциального объекта по ВН задающего устройства стабилизации, датчик абсолютной угловой скорости по ВН, пульт управления по ВН, усилитель мощности гидропривода ВН, измеритель угловых ускорений башни в плоскости ВН, датчик положения пушки по ВН, первый и второй датчики давления цилиндра исполнительного формируют на соответствующих входах блока управления сигнал ошибки по ВН, сигнал по абсолютной угловой скорости пушки по ВН, сигнал угловой скорости цели по ВН, сигналы обратных связей по скорости вращения вала и току приводного электродвигателя гидропривода ВН, сигнал углового ускорения башни в плоскости ВН, сигнал относительного положения пушки по ВН, сигналы по давлению в полостях цилиндра исполнительного гидропривода ВН.
Часть элементов системы (такие как модуль цифрового обмена и модуль цифрового управления и обработки) удобнее реализовать как часть программного обеспечения блока управления, при этом обработка получаемых блоком управления данных будет осуществляться контроллером, состоящим из модулей:
- аналого-цифрового преобразователя;
- цифроаналогового преобразователя;
- дискретного ввода-вывода;
- информационных каналов обмена, являющихся физическими портами контроллера.
Модуль управления и обработки с корректирующими звеньями, сумматорами и интеграторами, необходимыми для получения качественных показателей привода ВН, могут быть выполнены в виде подпрограмм управления выходами цифроаналогового преобразователя и дискретными выходами контроллера. Корректирующие звенья, сумматоры и интеграторы привода ВН представляют собой цифровые фильтры 1-го и 2-го порядка, полученные билинейным преобразованием аналоговых прототипов, причем частота обработки полученных блоком управления данных и выдача им сигналов управления на выходные усилители ВН будет определяться заданной частотой циклов обработки сигналов основным контроллером блока управления.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию» пер. с англ. - М.: Мир, 1976.)
Выходные усилители ВН блока управления могут быть выполнены по схеме, построенной на транзисторных каскадах управляемых в режиме широтно-импульсной модуляции (ШИМ) по сигналам ШИМ, формируемых контроллером блока управления.
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники», пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993.)
Заявляемый привод вертикального наведения и стабилизации работает в следующих режимах:
- в режиме стабилизации вооружения ОВН по ВН;
- в режиме стабилизированного наведения вооружения ОВН по ВН;
- в режиме приведения вооружения ОВН на заданные его конструкцией углы, в том числе и на угол загрузки;
- в режиме подтормаживания вооружения ОВН около упоров по командам блока управления.
Принцип действия привода ВН основан на том, что этот привод представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Направление в вертикальной плоскости, которое требуется придать пушке, является заданным значением регулируемого параметра для привода ВН.
При движении танка по пересеченной местности на пушку действуют внешние возмущения в виде колебаний корпуса танка, трения в цапфах (опорах) пушки, цилиндре исполнительном гидропривода ВН, а также возмущения, обусловленные неуравновешенностью пушки относительно оси цапф.
Эти возмущения вызывают отклонение пушки от направления в пространстве, заданного задающим устройством стабилизации с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН. Угол между заданным и действительным направлением в этом случае определяет ошибку стабилизации привода ВН. Сигнал, пропорциональный ошибке стабилизации, отрабатывается приводом ВН стабилизатора, поворачивающим пушку в сторону уменьшения ошибки.
Режим стабилизации вооружения ОВН - пушки 23 по ВН осуществляется по сигналам задающего устройства стабилизации (ЗУС) 2 с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН, формирующего по цифровому каналу обмена через внешние устройства 3 ошибку привода по ВН на входе модуля цифрового обмена 4 блока управления (БУ) 5.
Далее полученные сигнал датчика положения пушки (ДПП) 6 и сигнал ошибки по ВН с выхода модуля цифрового обмена 4 поступают для дальнейшего преобразования в модуль цифрового управления и обработки 7. В модуле цифрового управления и обработки 7 происходит суммирование с заданными коэффициентами сигнала ошибки по ВН с сигналами положительных и отрицательных обратных связей с первого (ДД1) 9 и второго (ДД2) 10 датчиков давления цилиндра исполнительного (ЦИ) 11 гидропривода ВН (ГП) 8, сигналом с датчика абсолютной угловой скорости по ВН (ДУС-ВН) 12, сигналом с измерителя (датчика) угловых ускорений (ИУУ) 13 башни в плоскости ВН и сигналами по току и скорости вращения вала приводного электродвигателя (ЭД) 14 с усилителя мощности (УМ) 15 гидропривода ВН (ГП) 8.
Указанные сигналы обратных связей позволяют повысить добротность и устойчивость привода ВН стабилизатора, тем самым обеспечив требуемое качество управления приводом ВН, что в сумме с новыми цифровыми алгоритмами управления позволяет уменьшить ошибку стабилизации пушки 23 по ВН.
Одновременно с указанными выше сигналами обратных связей в модуль цифрового управления и обработки 7 блока управления 5 поступает, как было описано выше, и сигнал с датчика положения пушки по ВН (ДПП) 6, который преобразуется методом дифференцирования в сигнал относительной скорости пушки по ВН. Полученный сигнал относительной скорости пушки по ВН представляет собой обратную связь по возмущению, воздействующему соответственно на пушку в плоскости ВН при движении ОВН по пересеченной местности. Введение указанной обратной связи по возмущению в контур управления приводом ВН позволяет также дополнительно повысить точность стабилизации пушки 23 по основному контуру управления - контуру ошибки привода ВН.
Также для повышения точности привода ВН при движении ОВН по тяжелой трассе, имеющей большие углы тангажа (крена) башни, требует повышенного (изменяемого по алгоритму) расхода насоса (Н) 17 гидропривода ВН (ГП) 8 и более высокочастотной (динамичной) характеристики механизма управления (МУ) 20 цилиндра исполнительного (ЦИ) 11. Для обеспечения решения данной задачи в структуре гидропривода ВН (ГП) 8 предусмотрено дополнительное пропорциональное управление расходом насоса (Н) 17 с встроенной жесткой обратной внутренней связью по скорости вращения собственного вала (вала приводного ЭД) и дополнительная обмотка управления (ОУ2) 19 механизма управления (МУ) 20 цилиндра исполнительного (ЦИ) 11. Таким образом, модуль цифрового управления и обработки 7 блока управления (БУ) 5, получая информацию с датчиков ((ИУУ) 13, (ДПП) 6, (ДУС-ВН) 12), формирует внутреннюю дополнительную замкнутую систему не только по ошибке ВН, как описано выше, но и по спектру возмущений, действующих на башню (корпус) ОВН, что позволяет формировать управление одновременно и скоростью вращения вала приводного электродвигателя (ЭД) 14 и реакцией механизма управления (МУ) 20 цилиндра исполнительного (ЦИ) 11.
Полученные и вычисленные модулем цифрового управления и обработки 7 сигналы управления по ВН с первого и второго выходов поступают на соответствующие входы первого (У-ВН1) 21 и второго (У-ВН2) 22 усилителей ВН блока управления (БУ) 5, формирующие соответственно сигналы управления первой (ОУ1) 18 и второй (ОУ2) 19 обмотками управления механизма управления (МУ) 20 цилиндра исполнительного (ЦИ) 11 гидропривода ВН (ГП) 8. Далее сигналы управления по ВН преобразуются механизмом управления (МУ) 20 в разность потоков рабочей жидкости в полостях цилиндра исполнительного (ЦИ) 11, что приводит к линейному перемещению его штока. Корпус и шток цилиндра исполнительного (ЦИ) 11 механически связаны соответственно с башней 24 и с пушкой 23 ОВН. Таким образом, перемещение штока цилиндра исполнительного (ЦИ) 11 приводит к угловому повороту пушки 23 в сторону уменьшения ошибки стабилизации привода в плоскости ВН, тем самым удерживая направление пушки 23 на выбранную цель.
Режим стабилизированного наведения вооружения ОВН - пушки 23 осуществляется по сигналам задающего устройства стабилизации (ЗУС) 2 с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН совместно с пультом управления (ПУВН) 1 по ВН, связанного с ним электрически. Наводчик (оператор) ОВН пультом управления (ПУВН) 1 по ВН наводит стабилизированную в плоскости ВН линию визирования (прицельную марку) задающего устройства стабилизации (ЗУС) 2 на цель. Сигналы с датчика (угла) положения по ВН задающего устройства стабилизации (ЗУС) 2, пропорциональные ошибке стабилизации по ВН, отрабатываются приводом ВН, поворачивающим пушку 23 в сторону уменьшения ошибки по ВН, аналогично рассмотренному выше режиму стабилизации.
Режим приведения вооружения ОВН - пушки 23 на заданные конструкцией ОВН углы, в том числе и на угол загрузки производится по сигналу с датчика положения пушки (ДПП) 6 и командам от внешних устройств 3. При поступлении от внешних устройств 3 по цифровому каналу обмена команды приведения на заданный конструкцией ОВН угол или угол загрузки модуль цифрового управления и обработки 7 блока управления (БУ) 5 переключает привод ВН с сигнала ошибки по ВН на сигнал датчика положения пушки (ДПП) 6. Значение сигнала с датчика положения пушки (ДПП) 6 формируется модулем цифрового управления и обработки 7 как алгебраическая разность между текущим значением сигнала с (ДПП) 6 в отсутствие команды на приведение и запомненным в памяти (БУ) 5 значением, соответствующим данной команде угла, при достижении заданного угла привод ВН переходит в режим гидростопорения цилиндра исполнительного (ЦИ) 11. После снятия команды на приведение на заданные конструкцией ОВН углы или угол загрузки модуль цифрового управления и обработки 7 выключает режим гидростопорения цилиндра исполнительного (ЦИ) 11 и переключает привод ВН на текущий сигнал ошибки по ВН, переводя его в режим стабилизации.
Режим подтормаживания вооружения ОВН - пушки 23 около верхнего и нижнего упоров реализован параллельно с режимом стабилизации привода ВН, описанным выше. При этом модуль цифрового управления и обработки 7 блока управления (БУ) 5 постоянно контролирует в режиме стабилизации привода ВН по сигналу с датчика положения пушки (ДПП) 6 - положение пушки 23 относительно жестких упоров по ВН, а также одновременно вычисляет ее относительную скорость методом дифференцирования сигнала с (ДПП) 6.
Полученные данные используются модулем цифрового управления и обработки 7 для формирования ширины зоны торможения около упоров, в которой происходит переключение с задачи стабилизации пушки по ВН на задачу либо ее подтормаживания при замыкании контура управления по ВН на разность между текущим значением сигнала с (ДПП) 6 в отсутствие команды на подтормаживание и его значением в момент поступления данной команды, либо включения при необходимости режима гидростопорения цилиндра исполнительного (ЦИ) 11.
Данный алгоритм работы привода ВН позволяет исключить высокоинерционные удары пушки по упорам в плоскости ВН, тем самым значительно уменьшая время нестабилизированного состояния пушки по ВН, что является качественным показателем привода ВН.
Приведенные в описании технические преимущества, целесообразность и надежность привода вертикального наведения стабилизатора танкового вооружения, реализованного по заявляемой структурной схеме, подтверждены испытаниями опытного образца стабилизатора на модернизированном объекте 188МС и объекте Т-14 на испытательной базе ОАО «УКБТМ» и ОАО «НПК Уралвагонзавод», г. Нижний Тагил.
Привод вертикального наведения и стабилизации, содержащий установленную на башне пушку с закрепленным на ней датчиком абсолютной угловой скорости по вертикальному наведению (ВН), цилиндр исполнительный гидропривода ВН, механически связанный с пушкой и башней и гидравлически с насосом гидропривода ВН, механизм управления цилиндра исполнительного гидропривода ВН, электрически связанного через собственные первые обмотки управления с первым усилителем ВН блока управления, приводной электродвигатель насоса гидропривода ВН, механически связанный с насосом гидропривода ВН, пульт управления по ВН, задающее устройство стабилизации с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН, электрически связанное с пультом управления по ВН, внешние устройства, электрически связанные с задающим устройством стабилизации с датчиком положения (угла) независимо стабилизированного в пространстве инерциального объекта по ВН, блок управления, отличающийся тем, что в него введены: измеритель угловых ускорений башни в плоскости ВН, датчик положения пушки в плоскости ВН, усилитель мощности приводного электродвигателя насоса гидропривода ВН, датчик скорости вращения вала приводного электродвигателя насоса гидропривода ВН, вторые обмотки управления механизма управления цилиндра исполнительного гидропривода ВН, первый и второй датчики давления цилиндра исполнительного гидропривода ВН, кроме того, в блок управления дополнительно введены модуль цифрового обмена, модуль цифрового управления и обработки, второй усилитель ВН, при этом внешние устройства электрически связаны через цифровые каналы информационного взаимодействия с датчиком положения пушки в плоскости ВН и модулем цифрового обмена, электрически связанного в свою очередь также через цифровые каналы информационного взаимодействия с модулем цифрового управления и обработки блока управления, измеритель угловых ускорений башни в плоскости ВН механически связан с башней, ось чувствительности которого параллельна оси цапф пушки, датчик положения пушки в плоскости ВН механически связан с башней и пушкой по ВН, причем указанные датчик положения пушки в плоскости ВН, измеритель угловых ускорений башни в плоскости ВН, датчик абсолютной угловой скорости по ВН, усилитель мощности приводного электродвигателя насоса гидропривода ВН, первый и второй датчики давления цилиндра исполнительного гидропривода ВН электрически связаны с модулем цифрового управления и обработки блока управления, при этом с одной стороны усилитель мощности приводного электродвигателя насоса гидропривода ВН электрически связан с бортсетью ОВН (объект военного назначения), приводным электродвигателем насоса гидропривода ВН и датчиком скорости вращения вала приводного электродвигателя насоса гидропривода ВН, механически связанным с приводным электродвигателем насоса гидропривода ВН, с другой стороны первый и второй выходы модуля цифрового управления и обработки электрически связаны с первым и вторым усилителями ВН блока управления, электрически связанными в свою очередь с первой и второй обмотками управления механизма управления, задающего направление движения штока исполнительного цилиндра в плоскости ВН, тем самым обеспечивая поворот пушки в сторону уменьшения ошибки в плоскости ВН.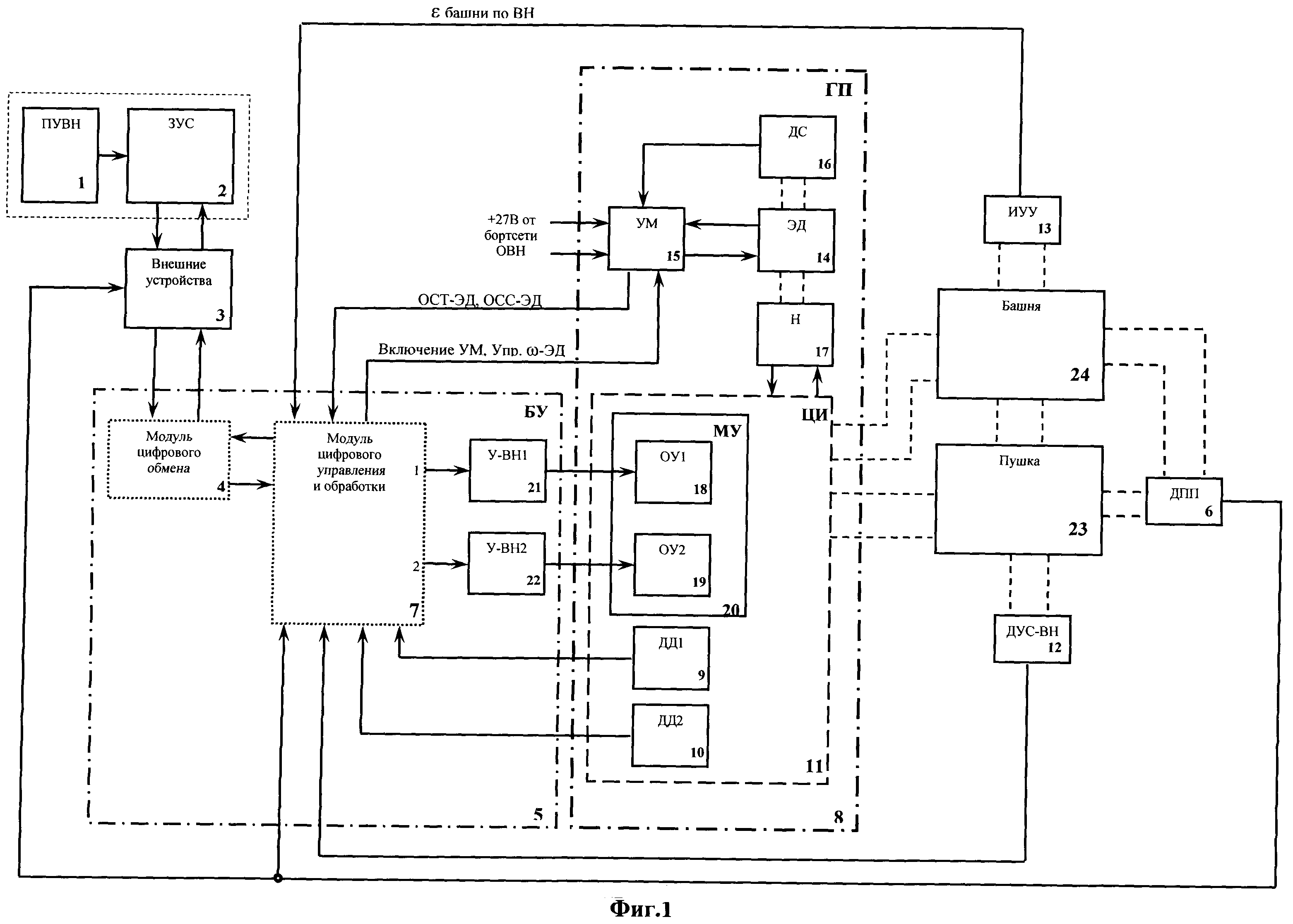
Телескопическая мачта
Подъемный механизм оружия башенной установки
Система стабилизации и управления вооружением боевой машины
Стабилизатор танкового вооружения
Привод горизонтального наведения и стабилизации
Поворотный механизм башни
Система управления и стабилизации вооружения боевого модуля
Стабилизатор вооружения боевого модуля
Система дистанционного управления вооружением
Стабилизатор вооружения боевого модуля
Телескопическая мачта
Подъемный механизм оружия башенной установки
Система стабилизации и управления вооружением боевой машины
Стабилизатор танкового вооружения
Привод горизонтального наведения и стабилизации
Поворотный механизм башни
Система управления и стабилизации вооружения боевого модуля
Стабилизатор вооружения боевого модуля
Система дистанционного управления вооружением
Стабилизатор вооружения боевого модуля

