Результат интеллектуальной деятельности: ПОДЪЕМНЫЙ МЕХАНИЗМ ОРУЖИЯ БАШЕННОЙ УСТАНОВКИ
Вид РИД
Изобретение
Изобретение относится к транспортному машиностроению, в частности к подъемным винтовым механизмам оружия башенных установок боевых машин.
Особенность кинематики подъемных винтовых механизмов, преобразующих поступательное перемещение выходного элемента винтовой пары (гайки) в угловое перемещение рабочего органа (оружия), заключается в том, что опора между гайкой и оружием выполняет криволинейное движение. В связи с этим в местах крепления винта и гайки с объектом должны быть предусмотрены дополнительные элементы, обеспечивающие угловые перемещения винтовой пары относительно объекта, например шаровые опоры, карданы и т.д.
Кроме этого, к современным механизмам предъявляются такие требования, как наличие цепи автоматического управления, цепи ручного управления, наличие механизма переключения в автоматический режим управления или ручной. В режиме автоматического управления предъявляются требования обеспечения высокой динамической точности привода и быстродействия, высокой чувствительности и высокой точности отработки управляющих команд. В свою очередь из теории автоматического регулирования известно, что неблагоприятно влияют на динамику автоматического управления люфты в кинематической цепи между местом соединения винта с рабочим органом и двигателями, большие значения моментов инерции вращающихся частей привода, приведенные к валу двигателя, моменты сопротивления вращению, низкая угловая жесткость привода.
Известны механизмы электрические прямоходные [1]. Исполнительные механизмы «СЕРВОМЕХ» предназначены для осуществления поступательного линейного перемещения рабочих регулирующих органов устройств различного назначения в системах автоматического регулирования технологическими процессами и автоматического управления в соответствии с командными сигналами. Рабочим органом механизма является винтовая пара, состоящая из винта и гайки, при этом гайка жестко связана со штоком и регулирующим органом устройства (с нагрузкой), а винт через редуктор связан с электродвигателем. На корпусе редуктора крепится опора, обеспечивающая связь винта с корпусом регулирующего органа устройства. По принципу крепления электродвигателя механизмы бывают двух исполнений:
- ось двигателя перпендикулярна оси механизма и вращает винт винтовой пары механизма через червячный редуктор;
- ось двигателя параллельна оси механизма и вращает винт винтовой пары механизма через зубчато-ременный редуктор.
Достоинствами указанных механизмов являются высокая надежность, обеспеченная простотой конструкции, хорошие массогабаритные показатели, широкие компоновочные возможности, так как за счет шарнирной установки механизм позволяет реализовать как прямолинейное, так и криволинейное движение.
Недостатками этих механизмов являются большие моменты сопротивления вращению, характерные для червячных редукторов, низкая угловая жесткость, присущая зубчато-ременной передаче, большие значения момента инерции приведенного к валу электродвигателя, что в итоге не позволяет обеспечить в режиме автоматического управления требуемые показатели динамической точности привода и быстродействия, высокой чувствительности и высокой точности отработки управляющих команд.
Известен подъемный механизм оружия, размещенного в лафете вне обитаемой части башенной установки [2] - прототип, содержащий редуктор ручного привода, электромеханический привод наведения оружия, выполненный в виде винтовой передачи, где винт соединен с редуктором, а гайка с лафетом. Электродвигатель электромеханического привода установлен на корпусе редуктора, при этом ротор электродвигателя закреплен на винте через карданную передачу, которая обеспечивает силовую связь между валом двигателя и винтом, взаимное угловое положение которых меняется в процессе работы. Механизм автоматического отключения редуктора ручного привода содержит электромагнит, муфту, пружину. Редуктор ручного привода приводится в действие вращением рукоятки.
При включении электромеханического привода ток подается на электромагнит, который выводит муфту, поджатую пружиной, из зацепления с шестерней, что обеспечивает отключение редуктора ручного привода от привода наведения оружия, одновременно концевой выключатель включает цепь электродвигателя.
При работе электродвигателя ротор вращает винт через карданную передачу, при этом вращательное движение винта преобразуется в поступательное движение гайки, что обеспечивает качание лафета и наведение оружия по вертикали.
При выключении электромеханического привода муфта входит в зацепление с шестерней под действием пружины, что обеспечивает подключение редуктора ручного привода к приводу наведения оружия, одновременно концевой выключатель выключает цепь электродвигателя.
При работе редуктора ручного привода вращение рукоятки передается через редуктор на винт, при этом вращательное движение винта преобразуется в поступательное движение гайки, что обеспечивает качание лафета и наведение оружия по вертикали.
Недостатками известного подъемного механизма являются, во-первых, использование карданной передачи в кинематической цепи электромеханического привода. Это, во-первых, приводит к существенному увеличению момента инерции вращающихся частей, так как он практически соизмерим с моментом инерции вала винтовой пары, как наиболее массивного элемента в приводе, во-вторых, увеличивает люфты в кинематической цепи между местом соединения винта с рабочим органом и двигателем. Люфты приводят к снижению степени чувствительности, динамической точности и быстродействия, неблагоприятно влияют на динамику автоматического управления.
Во-вторых, при определенных преимуществах соосного размещения электродвигателя и винтовой пары с креплением ротора электродвигателя на винте имеется недостаток в части увеличения осевого габарита механизма, что при ограниченных размерах объекта является критичным.
В-третьих, конструкция механизма автоматического отключения ручного привода предусматривает разрыв кинематической цепи перед выходным зубчатым колесом ручного привода, оставляя выходное зубчатое колесо ручного привода в постоянном зацеплении с винтовой парой, что существенно увеличивает момент инерции подвижных частей в цепи электромеханического привода, приведенный к валу электродвигателя.
Целью изобретения является улучшение эксплуатационных характеристик подъемного механизма оружия за счет снижения момента инерции в кинематической цепи электромеханического привода и уменьшения люфтов в кинематической цепи между местом соединения винта с рабочим органом и двигателем.
Указанная цель достигается тем, что в подъемном механизме оружия, размещенного в лафете вне обитаемой части башенной установки, содержащем редуктор привода подъемного механизма, привод наведения оружия, выполненный в виде винтовой передачи, состоящей из винта и гайки, при этом гайка связана с лафетом, винт связан с редуктором и имеет кинематическую связь с валом электродвигателя, образуя электромеханический привод, а ручной привод выполнен с механизмом его автоматического отключения при работающем электродвигателе, согласно заявляемому изобретению кинематическая связь электромеханического привода выполнена как понижающий редуктор, состоящий из зубчатого колеса, жестко связанного с винтом, другого зубчатого колеса, жестко связанного с валом электродвигателя, и паразитного зубчатого колеса между ними, гайка связана с лафетом, а редуктор связан с корпусом башенной установки через шарнирные опоры. Кроме того, ручной привод с механизмом его автоматического отключения содержит зубчатое колесо, закрепленное на оси входного вала ручного привода, второе зубчатое колесо, закрепленное на оси винта, а также третье зубчатое колесо, расположенное между ними и закрепленное на конце коромысла, которое имеет ось вращения, совмещенную с осью вращения входного вала ручного привода, а другой конец коромысла через пружину связан с корпусом редуктора и с электромагнитом, рабочий ход которого выбран из условия обеспечения поворота коромысла и линейного перемещения зубчатого колеса, расположенного на его конце, на величину не менее высоты зуба зубчатого колеса.
Существенными отличительными признаками являются:
- выполнение кинематической связи электромеханического привода механизма в виде понижающего редуктора, с использованием паразитного зубчатого колеса, установленного перед валом электродвигателя, что позволяет за счет оптимизации размеров зубчатых колес в пределах заданного общего передаточного отношения редуктора достигнуть максимального эффекта по снижению приведенного момента инерции вращающихся элементов электромеханического привода к валу электродвигателя;
- выполнение связи гайки с лафетом и редуктора с корпусом башенной установки через шарнирные опоры;
- использование для автоматического отключения ручного привода коромысла с зубчатым колесом на одном его конце и электромагнитом на другом его конце, при этом рабочий ход электромагнита выбран равным или более величины высоты зуба зубчатого колеса, что позволяет полностью исключить влияние элементов ручного привода на момент инерции электромеханического привода.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всей совокупности существенных признаков заявляемого изобретения. Это позволяет сделать вывод о соответствии заявляемого устройства критерию изобретения «новизна».
Не обнаружено также применения указанных признаков в заявляемой совокупности с другими признаками для достижения указанного результата, следовательно, заявляемое устройство соответствует критерию изобретения «изобретательский уровень».
Техническая сущность предложенного подъемного механизма оружия башенной установки поясняется чертежами, на которых:
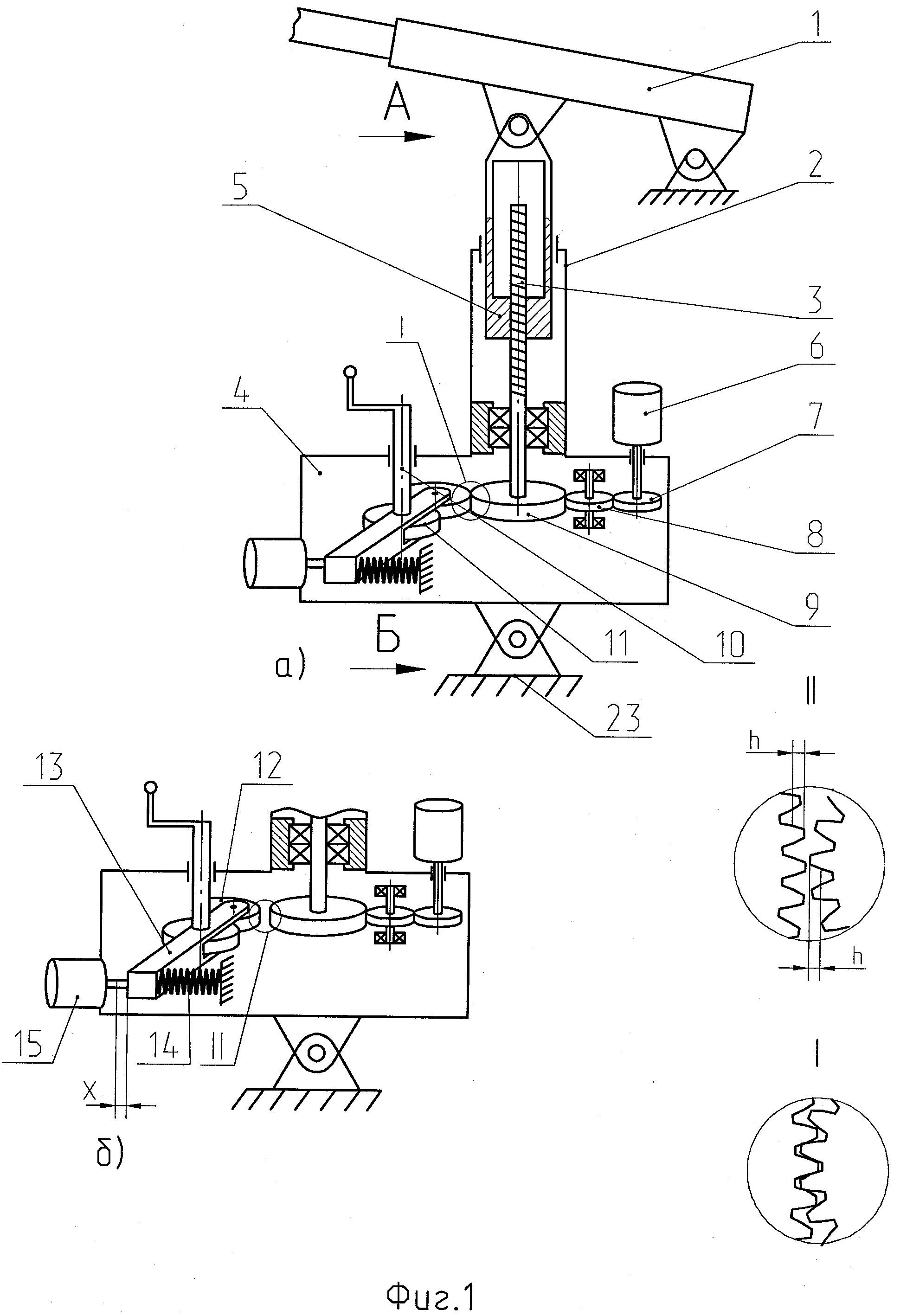
На фиг.1 представлена кинематическая схема предлагаемого варианта подъемного механизма оружия башенной установки.
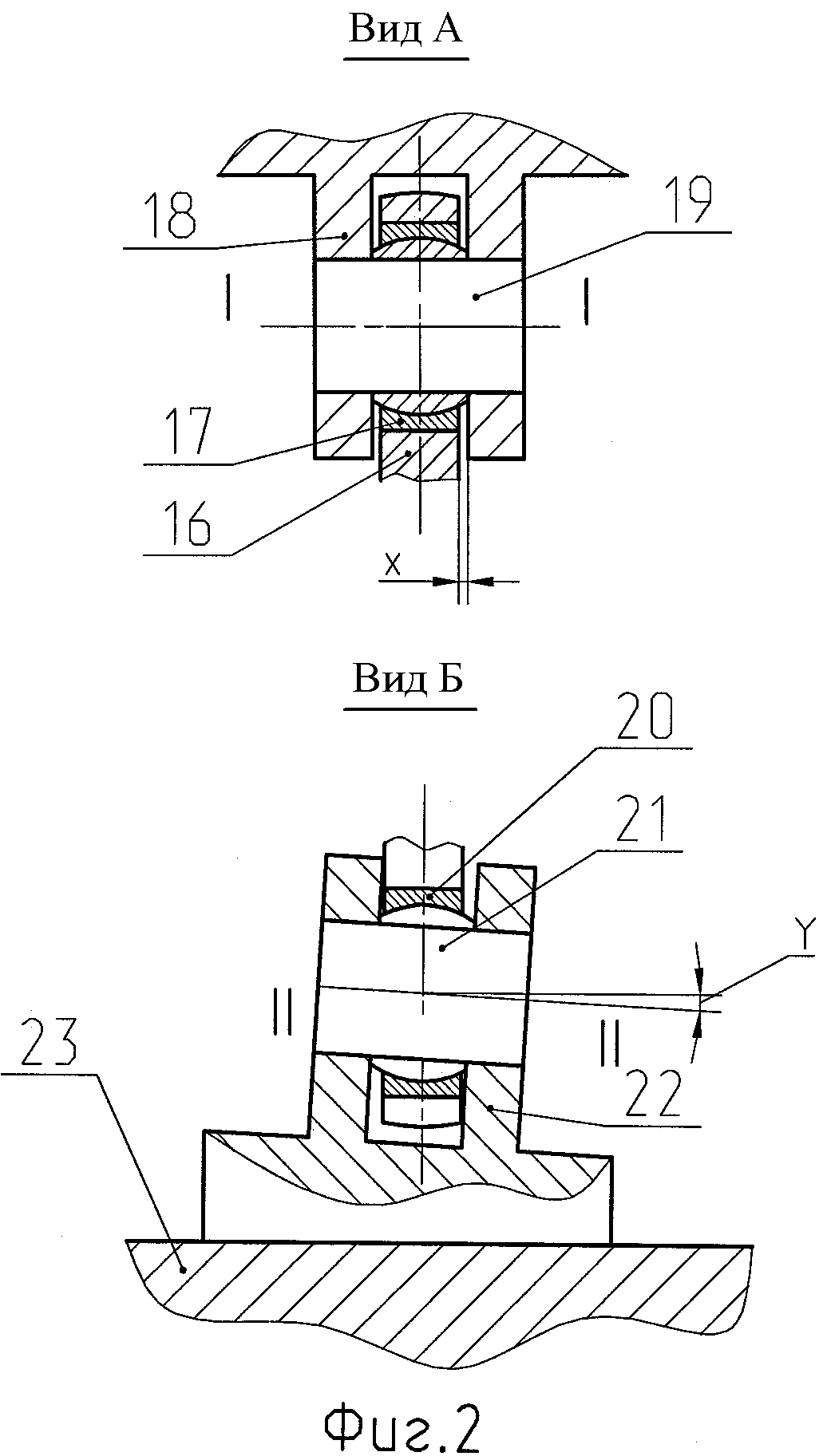
На фиг.2 представлена схема шарнирной опоры.
Подъемный механизм оружия, размещенного в лафете 1 вне обитаемой части башенной установки, содержит привод 2 наведения оружия, выполненный в виде винтовой передачи, где винт 3 соединен с редуктором 4, а гайка 5 - с лафетом 1. Электродвигатель 6, установленный на корпусе редуктора 4, зубчатое колесо 7, установленное на валу электродвигателя 6, паразитное зубчатое колесо 8 и зубчатое колесо 9, установленное на винте 3, составляют электромеханический привод. Вал 10, зубчатое колесо 11, установленное на валу 10, зубчатое колесо 12, установленное на одном конце коромысла 13, с зубчатым колесом 9 составляют ручной привод, при этом коромысло 13, пружина 14 и электромагнит 15 составляют механизм автоматического выключения ручного привода при работающем электродвигателе. Соединение гайки 5 с лафетом 1 и винта 3 через корпус редуктора 4 с основанием башенной установки осуществляется с применением шарнирных опор 16.
Шарнирная опора в соединении гайки 5 с лафетом 1 состоит из корпуса подшипника 16 и установленного внутри него подшипника 17, имеющего три вращательные степени свободы. Подшипник связан с проушиной 18 лафета 1 при помощи оси 19. Аналогичная шарнирная опора используется для связи редуктора 4 с корпусом башенной установки 23 и состоит из подшипника 20, оси 21 и проушины 22 корпуса башенной установки 23 (см. фиг.2, виды А и Б).
Подъемный механизм оружия может работать в режиме электромеханического наведения или в режиме ручного наведения.
В режиме электромеханического наведения подается питание на электромагнит 15, шток которого, преодолевая усилие пружины 14, воздействует на конец коромысла 13 и поворачивает его относительно оси вращения вала 10 таким образом, чтобы зубчатое колесо 12, установленное на другом конце коромысла, вышло из зацепления с зубчатым колесом 9, установленным на винте 3. С этой целью рабочий ход «X» (см. фиг.1 вариант Б) штока электромагнита 15 выбран из условия, чтобы перемещение зубчатого колеса 12 при повороте коромысла 13 было на величину не менее высоты «h» (см. фиг.1 выносной элемент II) зуба зубчатых колес 12 и 9, что обеспечивает полный разрыв кинематической цепи ручного привода и исключает влияние элементов ручного привода на момент инерции электромеханического привода. Далее при подаче управляющего сигнала на электродвигатель 6 вал электродвигателя через зубчатые колеса 7, 8, 9 обеспечивает вращение винта 3, которое преобразуется в поступательное перемещение гайки 5, что обеспечивает качание лафета 1 и наведение оружия по вертикали. Использование в кинематической цепи редуктора паразитного зубчатого колеса 8 позволяет обеспечить значительное снижение момента инерции вращающихся частей приведенного к валу электродвигателя. Так, например, если необходимое по условиям энергетического расчета передаточное отношение редуктора между винтом 3 и валом электродвигателя 6 должно быть равным i=3, то при минимально возможном межцентровом расстоянии А, то есть расстоянии между осью винта 3 и осью вала электродвигателя 6, ограниченном габаритами винтовой пары и электродвигателя, данное передаточное отношение может быть выполнено либо в варианте с паразитным колесом, либо без него:
- для варианта без паразитного колеса с диаметром колеса 9 D9=1,5A и диаметром колеса 7 D7=0,5A передаточное отношение будет определяться выражением i=D9/D7=1,5/0,5=3;
- для варианта с паразитным колесом с диаметром колеса 9 D9=A, колеса 7 D7=0,33A и колеса 8 D8=0,4A передаточное отношение будет определяться выражением i=(D9/D8)·(D8/D7)=D9/D7=A/0,33A=3.
Учитывая известную формулу для определения момента инерции диска, как аналога зубчатого колеса
J=mr2/2,
где J - момент инерции диска;
m - масса диска;
r - радиус диска,
и сравнивая размеры колес 7 и 9 для рассматриваемых вариантов, следует вывод, что в варианте редуктора с паразитным колесом диаметры колес 7 и 9 меньше в 1,5 раза, соответственно и масса меньше и, учитывая квадратичную зависимость момента инерции от радиуса, суммарный момент инерции их, приведенный к валу электродвигателя, будет в несколько раз меньше. Выше отмечалось, что снижение момента инерции способствует улучшению характеристик привода.
При выключении электромеханического привода отключается питание от электромагнита 15 и электродвигателя 6. Под действием усилия пружины 14 коромысло 13 поворачивается таким образом, чтобы обеспечить нормальное зацепление зубчатых колес 12 и 9 (см. фиг.1 выносной элемент I) и этим образовать кинематическую цепь ручного привода.
В режиме ручного наведения вращение вала 10 передается через зубчатые колеса 11, 12 и 9 на винт 3, вращательное движение которого преобразуется в поступательное перемещение гайки 5, что обеспечивает качание лафета 1 и наведение оружия по вертикали.
Применение шарнирных опор для соединения гайки 5 с лафетом 1 и винта 3 через корпус редуктора 4 с основанием башенной установки 23 позволяет обеспечить компенсацию возможного перекоса оси I-I проушины лафета относительно оси II-II проушины корпуса башни на угол Y (см. фиг.2, виды А и Б). Данный перекос имеет место в силу того, что проушины 18 и 22 расположены на разных частях машины. Во-вторых, применение шарнирных опор позволяет обеспечить криволинейное движение опоры между гайкой 5 и лафетом 1, которое имеется при данной кинематической схеме поворота оружия и для реализации которого в прототипе был использован кардан. Исключение кардана решает задачу снижения момента инерции и люфтов в электромеханическом приводе.
Предлагаемое техническое решение предполагается использовать на бронетранспортерах БТР-82, выпускаемых ОАО «Арзамасский машиностроительный завод».
Источники информации
1. Буклет продукции «Сервомех», информация на сайте WWW.SERVOMECH.RU:
2. Патент на изобретение ОАО «ГАЗ» №2241194 С1 «Подъемный механизм оружия».
Модульная электрическая машина
Система стабилизации и управления вооружением боевой машины
Стабилизатор танкового вооружения
Привод вертикального наведения и стабилизации
Привод горизонтального наведения и стабилизации
Поворотный механизм башни
Система управления и стабилизации вооружения боевого модуля
Стабилизатор вооружения боевого модуля
Система дистанционного управления вооружением
Стабилизатор вооружения боевого модуля
Модульная электрическая машина
Система стабилизации и управления вооружением боевой машины
Стабилизатор танкового вооружения
Привод вертикального наведения и стабилизации
Привод горизонтального наведения и стабилизации
Поворотный механизм башни
Система управления и стабилизации вооружения боевого модуля
Стабилизатор вооружения боевого модуля
Система дистанционного управления вооружением
Стабилизатор вооружения боевого модуля

